基于深度學習的新能源變電站設備檢測模型研究
2022-05-21 22:14:02李福龍,馬孝棟,魏春雷,王天慧,陳洲生
今日自動化 2022年2期
李福龍,馬孝棟,魏春雷,王天慧,陳洲生

[摘? ? 要]新能源發電行業正朝著無人值守、少人值守的方向發展,變電站智能機器人巡檢方案通過整合不同的技術來實現這一目標,從而替代運維人員執行對站內室外高壓設備的巡視檢查、對電表數值的現場讀取、對電力設備運行數據的實時采集等任務,并預測可能發生的故障,旨在為巡檢機器人提供電力設備自主識別能力,模擬人工巡檢中對各種設備進行定制化檢查,涉及的設備類型有變壓器、斷路器、互感器、隔離開關、儀表、閥門等。鑒于變電站現場環境的復雜性,提出了一種基于深度學習的實時設備檢測模型。結果表明,該模型的平均精度在90%以上,驗證了該設備檢測模型的實用性,并展示了其在巡檢機器人系統上的應用潛力。
[關鍵詞]電力巡檢;機器人;目標檢測;設備識別
[中圖分類號]TM50 [文獻標志碼]A [文章編號]2095–6487(2022)02–0–04
Research on the Equipment Detection Model of New
Energy Substation Based on Deep Learning
Li Fu-long,Ma Xiao-dong,Wei Chun-lei,Wang Tian-hui,Chen Zhou-sheng
[Abstract]The new energy power generation industry is developing in the direction of unattended and few people on duty. The intelligent robot inspection solution for substations achieves this goal by integrating different technologies, thereby replacing operation and maintenance personnel to perform inspections and inspections of high-voltage equipment inside and outside the station, on-site reading of meter values, real-time collection of power equipment operating data and other tasks, and prediction of possible failures. This article aims to provide the inspection robot with the ability to independently identify power equipment, and to simulate the customized inspection of various equipment during manual inspections. The types of equipment involved in this research include transformers, circuit breakers, transformers, isolating switches, meters, and valves. In view of the complexity of the substation site environment, we propose a real-time equipment detection model based on deep learning. The results show the remarkable performance of the model, with an average accuracy of more than 90%. This work verifies the practicability of the equipment detection model and demonstrates its application potential in the inspection robot system.
[Keywords]power inspection;robot;target detection;equipment recognition
現階段新能源變電站巡檢主要是以人工巡檢為主,部分設備的自動監測為輔。為確保站內設備安全穩定運行,站內會設置日常巡視檢查制度,運維人員通過定期巡視檢查關鍵設備的有無異常情況,從而判斷設備是否正常運行,及時掌握生產運行中的異常情況,并采取相應處置措施,對于降低電力事故的發生概率和嚴重程度具有非常重大的意義。因此,變電站需要參考變電設備的實際運行工況,同時結合過往處置設備異常、故障和缺陷的教訓和經驗,制訂詳盡的檢查方案。在這些背景下,管理所有可用的信息,評估設備的運行狀態并及時做出處理異常操作的決策是極其困難的。因此,需要一種有助于防止人為錯誤的手段,并阻止可能將小事故轉變為災難性故障的連鎖反應。智能巡檢機器人被認為是完成這些任務的最佳替代者,通過分析設備當前數據并生成設備狀態評估來實現這一需求。當前機器人的技術水平也完全能夠有效執行這些任務,包括自主導航、探索危險或者無法進入的區域、可以在機器人上安裝各種傳感器、快速分析傳感器數據、執行任務的成本和時間相對較低。
在進行人工巡檢時,值班人員不僅要熟悉待檢設備的基本情況,同時也要了解該設備的歷史運行狀態。對于巡檢機器人來說,監控后臺可以為其提供所需的信息和設備歷史記錄,但巡檢機器人還需要一項非常基本的能力從而替代人工巡檢作業,那就是檢測和識別環境中待檢的設備。本文主要在無人值守的背景下,提出了一種基于深度學習的電力生產現場設備檢測方法,回顧了當前國內外巡檢機器人技術現狀,詳細闡述了巡檢機器人目標檢測策略,基于深度學習的設備檢測模型的開發和評估給出了本項工作的結論和未來的展望。
1 國內外發展現狀
現代機器人技術是計算機科學和網絡通信技術的集大成者,在過去十年中,由于機器人對這類重復且存在安全隱患的工作的兼容性,在工業領域使用機器人執行巡檢任務越來越普遍。自2013年開始,道達爾公司組織了一項ARGOS挑戰賽,主題為創造一個服務于油氣站點的自主機器人。這次比賽分3輪進行,通過這3輪回合,機器人需要自主完成監視任務,檢查各種視覺檢查點,如壓力表和閥門,并監測場區的熱點、氣體泄漏和聲音信號。在電力行業,張浩杰等開發了一套變電站巡檢機器人系統,他們使用了一個配備電磁傳感器、RFID閱讀器、攝像機、激光雷達傳感器、紅外熱成像儀和定向麥克風的四輪機器人。機器人跟隨磁性標記作為巡檢任務的檢查點。對于該系統,需要為巡檢機器人定義巡檢點,以便使用正確的傳感器執行檢查任務。本文的目標是使巡檢機器人具有設備識別能力,從而獲得更高的感知優勢,這一點的重要性已經在實際項目中得到證明。人工巡檢過程中,巡視人員能夠識別設備類型,并在此基礎上決定該設備的檢查項。例如,在檢查電力變壓器時,巡視人員需要查看變壓器的油溫與油位表,并檢查變壓器外表有無異常。如果巡檢到線路時,巡視人員會目視檢查線路,特別是連接處,使用熱成像儀檢測電纜溫度。該變電站智能機器人巡檢系統可以實時跟蹤變電設備的歷史數據,并將這些信息提供給巡檢機器人,以方便巡檢工作。同樣,巡檢機器人也會將日常設備巡檢信息發送到后臺服務器。
2 機器人巡檢方案
2.1 總體框架
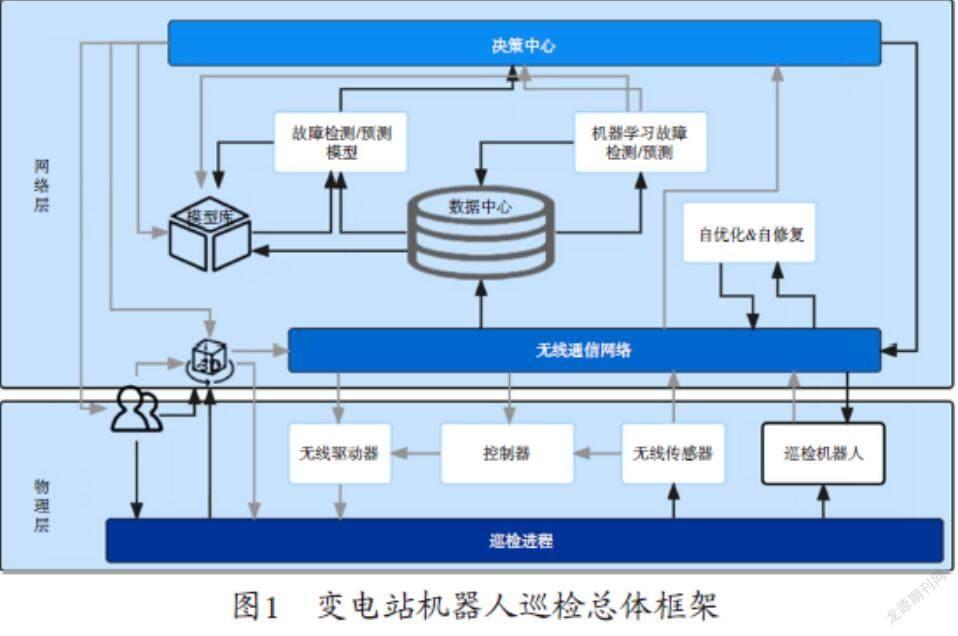
新能源變電站智能巡檢機器人系統是一種面向巡檢過程的智能監控解決方案,利用無線傳感器網絡、5G通信、協同控制、智能決策框架、機器人等技術優勢,確保巡視檢查工作高效完成。該方案的總體框架如圖1所示,結構采用模塊化設計,由6個主要模塊構成,包括完整的系統模型和協同控制、海量連接彈性網絡通信、基于機器學習的缺陷檢測和預測模型、智能自適應決策模型、三維數字化電站和自主巡檢機器人。該框架分為物理層和網絡層,物理層包括巡檢過程本身、無線傳感器和驅動器、物理控制器和巡檢機器人,網絡層包括無線通信網絡、數據中心、缺陷檢測和預測算法以及決策框架。
作為機器人巡檢系統的核心組成,智能決策框架應基于變電設備的運行狀態向值班人員提出建議,同時根據當前情況定義機器人的后續任務,繼續日常巡視工作或其他更具體的工作任務。巡檢機器人的主要任務是在變電站內巡邏,發現系統能力范圍內的異常情況(日常巡檢)。
2.2 巡檢策略
本文提到的巡檢機器人是一種小型的輪式機器人,集成了紅外及可見光鏡頭、二維激光測距儀、聲學和氣體傳感器,廣泛適用于電廠GIS室、主變室、配電房或其他適于人工作業區域的巡檢任務。傳感器種類是根據實際工作環境下的巡檢任務的需求來配置的,同時機器人可能需要在配電室和輸電線路周圍機動,機器人的尺寸也應適合在這種環境中使用。現階段變電站內的日常巡檢工作通常由站內值班人員執行,在一定程度上能夠高效地完成這些任務,但存在巡檢效率低、耗時長、巡檢質量不可控、人員工作強度高、人身安全不能保障等問題。因此,對巡檢機器人的需求很清晰,那就是讓機器人履行巡視人員的職責,提高巡檢效率和電站運行可靠性。
由于一般的任務都是有針對性的,對不同類型的設備應當制定不同的檢查項和判斷依據。復雜電磁環境下,機器人的定位精度存在較大偏差,獲取的動態畫面也并非完全一致的,僅定義設備的位置不足以讓機器人完成巡檢任務。因此,巡檢機器人需要具備目標檢測的能力,才能夠有效地執行自主巡檢任務。本文研究的巡檢策略體系中,首要任務是設備類型的檢測,選取了六種電力設備,包括變壓器、斷路器、互感器、隔離開關、閥門和儀表,這些設備都是新能源變電站中最常見的類型。巡檢機器人根據設備類型決定需要執行的巡檢任務清單,每種類型的設備需要使用不同的傳感器,需要執行不同的檢查清單。
3 目標檢測算法
3.1 算法設計
基于設備識別的機器人巡檢系統需要一個實時目標檢測方案來滿足任務需求,設備識別過程包括圖像中目標的分類和定位。在此之前,目標檢測領域最主流的算法一直是R-CNN系列,擁有超高的檢測精度高和雙結構(two stage)的特性,但它的檢測速度并不能滿足移動巡檢的需求。YOLO系列算法的網絡結構則具有單階段(single stage)的特點,不再需要過去多步驟才能完成的目標檢測。 YOLOv3版本繼承了系列算法優點,骨干網絡更新為darknet-53網絡結構,在兼顧實時性的同時保證了目標檢測的準確性,同時支持多尺度目標檢測。
算法設計實現分三個階段進行:數據集收集、模型訓練和結果驗證。數據集的采集有兩個目的,對某光伏發電項目升壓站內的變電設備圖像數據集進行采集和標注。在對圖像進行人工目視檢查并確認其正確性和質量后,標注設備類型。該數據集被分為訓練和驗證兩部分數據,整個數據集為1 900張圖像,訓練數據占比全部數據的80%,剩余的20%為驗證數據。對結果數據集的目視化檢查顯示了多種相關挑戰,如照片模糊、尺度變化、遮擋和背景雜波。
本文使用了部分預訓練權值作為初始訓練模型以加快模型訓練進程,訓練過程使用GPU和CPU同時進行。在訓練過程中,對損失函數進行了全程監控,YOLOv3使用實際輸出值和樣本標簽值之間的方差和誤差來計算損失值。損失函數由三部分損失組成,分別是:坐標預測、置信度預測、類別預測,最終的損失值是這些值的總和。在模型巡檢過程中,使用驗證數據集周期性的進行模型效果驗證。
訓練后的模型應達到一定的檢測精度以滿足巡檢任務的預期,通常使用PASCAL VOC評估指標來評估目標檢測模型的分類和定位性能。第一個指標是精準度,其計算方法是正確識別的樣本數和被識別的樣本(包括正確的和錯誤的)總數之比,該指標用來衡量檢測模型將樣本正確識別的準確性。第二個指標是召回率,計算方法為被正確識別的樣本數與正確樣本總數的比值,該指標用來衡量模型檢測正確樣本的能力。第三個指標則是交并比(intersection-over-union),即模型預測的邊界框與數據集中標記的邊界框的交疊率。平均正確率(Average Precision)是另一個在目標檢測領域非常流行的評價函數。其中,AP值可以被定義為在不同召回率下最大精準度的平均值,mAP(Mean average precision)則是所有類別的AP平均值。本文則增加了另一種評價目標檢測模型準確性的指標,那就是F1score,計算方法為精準率和召回率的調和平均值,同時考慮了目標檢測模型的精準度和召回率,其中F1score取值范圍是0到1,1代表最佳值(精準率和召回率達到完美狀態),0代表最差值。
3.2 性能評價
為了驗證和監控模型的性能,在訓練過程中使用驗證數據集定期計算mAP值,這有助于確保設備檢測模型在訓練期間保持全局性能最優,避免出現過擬合或者欠擬合的問題。過擬合是指模型對訓練數據集學習的太好,在訓練數據集上表現良好,但在保持樣本上表現不佳。相反,欠擬合是指模型不能充分學習問題,即使在訓練數據集上也表現不佳。
邊界框置信度的閾值是優化目標檢測的一個重要的參數,置信閾值用于定義IoU,計算方法是“預測的邊界框”和“真實的邊界框”的交集和并集的比值。置信閾值為50%意味著接受那些邊界框和真實目標重疊超過50%的檢測結果為正確值。增加置信閾值會導致每個圖像的邊界框數量變少,降低置信閾值會導致檢測結果中更多的邊界框。
經過12 000次迭代后訓練損失值和評價指標mAP的百分比(mAP值是在訓練迭代期間計算的),在訓練過程中損失值趨于穩定并且穩定收斂到一個小數值(0.087 5)表明模型訓練找到了損失函數的全局最小值。該模型檢測準確性驗證的結果為91.6%(mAP)。
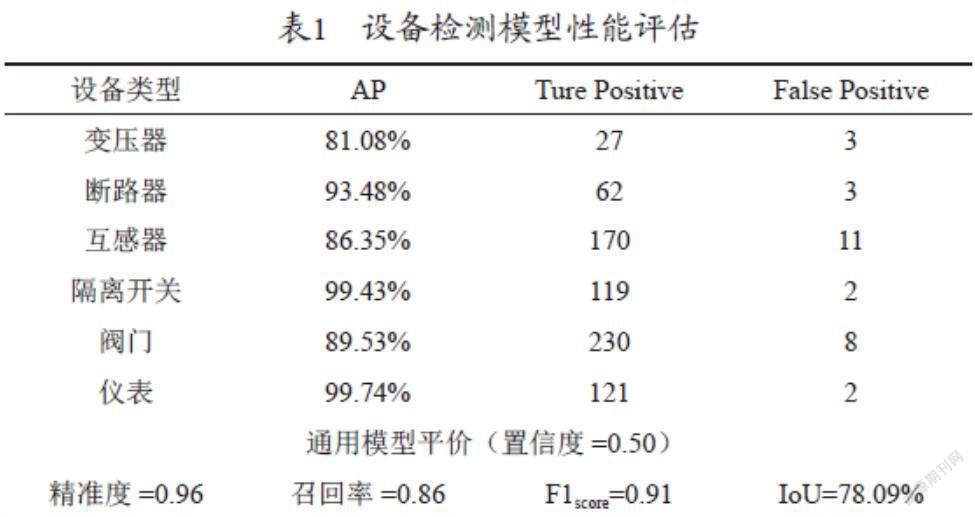
表1概括了每個類別和整個模型的評估細節,通常模型評估是在置信閾值為0.5時進行的,評估結果顯示,模型精準度為0.96,表明了模型的可識別性,0.86的召回率表明該模型能夠基本返回相關結果。F1score結合了模型的精準度和召回率,0.91的結果反映了設備檢測模型整體性能的魯棒性。交并比(IoU)顯示為78.09%,表示預測邊界框與標注邊界框幾乎重合。這些評價指標顯示了該模型在變電站實際生產運行環境中檢測設備的準確性。
上述評估結果表明,在變電站這種復雜的環境中,該模型依然能夠檢測不同類型的設備,且具有較高的準確性:①變壓器和互感器兩種類型的檢測性能相對較低是由以下原因造成的。變壓器的訓練數據量最少,因此需要更多不同條件下的樣本訓練數據。②盡管互感器的樣本數量第二高,但它代表了一個非常復雜的模型,可以有不同的大小和形狀,因此在電力生產環境中通常存在其他類似的設備很容易被誤分類為互感器。
4 結論
本文提出的設備檢測模型以實際應用出發,基于YOLOv3算法實現,考慮準確性和實時操作的需求,同時對訓練好的模型進行了評估,并對其性能進行了驗證,定量和定性分析結果表明了該模型的準確性。未來更多電力設備類型將通過遷移學習技術納入該模型,進一步增強電力巡檢機器人的業務能力,實現大量無人值守的設施設備遠程監控、告警,實現站內信息的自動采集、即時控制、智能調節、在線決策、人機協同等功能,提升信息化管理水平,提高維護、巡檢和搶修的效率,提高安全保障管理水平。
參考文獻
[1] 魯守銀,張營,李建祥,等. 移動機器人在高壓變電站中的應用[J]. 高電壓技術,2017,43(1) : 276-284.
[2] 高旭,王育路,曾健.基于移動機器人的變電站儀表自動識別研究[J].電網與清潔能源,2017,33(11):85-90.
[3] 李若宇,馬天璞,馮俊瑞. 變電站自動巡檢機器人設計[J]. 中國新通信, 2020, 22(8): 134-135.
[4] 黃山,吳振升,任志剛,等.電力智能巡檢機器人研究綜述[J].電測與儀表,2020,57(2):31-43.
[5] 翁智,程曦,鄭志強.基于改進YOLOv3的高壓輸電線路關鍵部件檢測方法[J].計算機應用,2020,40(S2):183-187.
[6] 蔣姍,孫淵,嚴道森,等.基于深度學習算法的航拍巡檢圖像的絕緣子識別[J].福州大學學報(自然科學版),2021,49(1): 58-64.
[7] LIU S,HUANG D. Receptive field block net for accurate and fast object detection [C]//2018.
[8] Haojie Zhang, Bo Su, Hong Meng.Development and implementation of a robotic inspection system for power substations[J]. Industrial Robot,2017(3):333-342.
[9] Ren SHaoqing,He Kaiming,Girshick Ross,et al. Faster R -CNN:Towards Real -Time Object Detection with Region Proposal Networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(6):1137-1149.