線控轉向汽車路感控制策略
2022-05-18 06:27:10謝立剛
重慶理工大學學報(自然科學) 2022年4期
謝立剛,陳 勇
(1.北京信息科技大學 機電工程學院,北京 100192;2.新能源汽車北京實驗室,北京 100192)
0 引言
駕駛員在執行轉向操作時,通過方向盤得到車輛行駛中的轉向阻力矩,被稱為路感[1]。線控轉向(steer-by-wire,SBW)系統取消了方向盤與轉向器之間的機械連接,通過控制轉向執行電機控制轉向前輪,達到轉向的目的[2]。然而取消機械部件連接,在隔絕了路面對于轉向盤組件的干擾外,提升了駕駛員的駕車體驗,但同時也喪失了駕駛員對于行駛路況的感知,線控轉向系統通過路感電機來模擬產生轉向阻力矩[3]。
目前線控轉向系統的路感反饋方面,主要通過動力學模型計算[4-6]和參數擬合[7-8]兩種方式模擬生成轉向阻力矩。動力學模型計算方法是通過分析傳統轉向系統的路感產生原理,利用輪胎側向力即輪胎拖矩等參數,建立動力學模型,計算得到路感反饋力矩,駕駛員易適應;參數擬合選取方向盤轉角、轉角速度及車速等車輛狀態參數,進行函數擬合,獲得路感。Xiao 等[9]對電動叉車線控轉向系統的轉向輔助力矩、阻尼、限位力矩進行綜合控制。謝有浩等[10]運用擴展卡爾曼濾波算法,對路面附著系數進行估計,并根據不同的路面附著系數來設計不同的回正電流,使得所設計的線控轉向系統在各種路面上都具有較好的回正性能。學者研究控制路感電機采用的方法多為PID控制,Zhou 等[11]采用扭矩、電流雙閉環PID 對路感電機進行控制;Tian 等[12]使用模糊PID 控制路感電機產生轉向阻力矩,模擬路感。胡延平等[13]對路感阻力矩中的摩擦力矩將遺傳算法和BP 神經網絡相結合,對非線性及個體化差異的固有摩擦力矩進行高精度逼近,進而計算目標反饋力矩。
設定模糊規則對人員的實際經驗要求較高,以及遺傳算法在進行到復雜工況求解時,計算量較大,耗時長。參數擬合需要大量的實驗數據以及車輛參數,不易獲取,針對以上問題,選取動力學模型計算的方式生成目標回正力矩,使用粒子群算法優化PID 控制器,控制路感電機,模擬產生轉向阻力矩,使駕駛員獲得“路感”。
1 建立模型
SBW 系統主要由方向盤總成、控制器(ECU)以及轉向執行總成3 部分構成[14],結構簡圖如圖1 所示。基于Simulink 搭建線控轉向系統模型,與Carsim 平臺聯合仿真構成線控轉向汽車。

圖1 線控轉向系統結構示意圖
文中主要研究路感反饋部分,便只羅列轉向盤總成部分模型,主要包含轉向盤、路感電機和減速機構3 部分。
轉向盤數學模型[14]為:

式中:Jsw為轉向盤轉動慣量,kg·m2;Bsw為轉向盤阻尼,N·m/s;Ks為轉矩傳感器剛度,N/rad;θsw為轉向盤轉角,rad;Tf為轉向盤摩擦力矩,N/m;Tsw為駕駛員輸入力矩,N/m。
路感電機數學模型為:

式中:Tm1=kftIm1;Jm1為路感電機轉動慣量,kg·m2;Bm1為路感電機阻尼,N·m/s;θm1為電機轉角,rad;g1路感電機減速比;Tm1為路感電機電磁力矩,N/m;kft為電機電磁系數,N·m/A。
路感電機電樞電壓方程為:

式中:Ra1為路感電機電阻,Ω;La1為電機電感,H;Im1為電機電流,A;kfe為電機反電動勢系數N·m/A。
2 路感反饋控制策略
2.1 目標轉向阻力矩
傳統轉向系統的轉向阻力矩主要由回正力矩與轉向系統的摩擦力矩組成,然而輪胎回正力矩包括了由輪胎拖距以及輪胎定位引起的回正力矩。由輪胎拖距產生的回正力矩可以表示為輪胎側向力與輪胎拖矩的乘積,即:

式中,輪胎側向力可以簡化計算為汽車前橋質量mf與側向加速度ay的乘積,即:

而轉向半徑R 為:

穩定因數K 為:

式中:k1、k2分別為前、后輪的總側偏剛度,N/rad;m 為汽車總質量,kg;ωr為橫擺角速度,rad/s;a 為質心至前軸距離,m;b 為質心至后軸距離,m;L 為汽車軸距,m;δf為汽車前輪轉角,rad。
由輪胎定位(主銷內傾)造成的回正力矩是汽車低速行駛時輪胎產生回正力矩的主要部分,表示為:

式中:Q 為輪胎載荷,N;D 為主銷內移量,m;β′為主銷內傾角,(°)。
那么由回正力矩引起的阻力矩M1可以寫成M1=,i 為轉向系的力傳動比。
摩擦力矩[9]可以寫為:

式中:τs為轉向系統摩擦力矩,取τs=1.5 N·m。
轉向阻力矩M 可以表示為M=M1+Tf。
2.2 路感電機控制
線控轉向系統中由通過控制路感電機模擬產生轉向阻力矩。本文采用的工業中常用的PID 控制,PID 控制器根據理想值r(t)與實際值c(t)構成的偏差e(t)=r(t)-c(t)。通過比例、積分和微分加權組合控制,對路感電機進行控制。其一般形式[15]為:

對路感電機的控制過程如圖2 所示。

圖2 路感電機控制過程框圖
PID 控制器最主要的問題是參數的設定,在調整PID 參數時,多數靠專家經驗以及試湊的方法,不僅費時,而且不能保證獲得最佳的性能。為解決此問題,使用粒子群算法優化PID 控制器。粒子群算法(particle swarm optimization,PSO)源于對鳥類捕食行為的研究[16],與傳統優化算法相比,計算速度更快、全局搜索能力更強。PSO 優化PID控制器參數過程如圖3 所示。

圖3 PSO 優化PID 的過程框圖
常用的誤差性能指標包括ISE、IAE、ITAE、ISTE 等,由于按ITAE 準則設計的控制系統瞬態響應的震蕩小[17],這里選用ITAE 指標作為輸出性能指標,其定義為:

粒子在搜索空間中的速度和位置根據以下公式確定:

式中:x 表示粒子的位置;v 表示粒子的速度;ω 為慣性因子;c1、c2為加速常數;r1、r2為[0,1]之間的隨機數,用于增加粒子飛行的隨機性;Pt是粒子目前搜索到的最優位置;Gt是整個粒子群目前搜索到的最優位置。
3 仿真分析
利用Simulink 與CarSim 平臺聯合仿真構成的線控轉向汽車,進行仿真分析,利用CarSim 中車輛模型參數,仿真部分參數見表1。

表1 車輛仿真參數
3.1 中間位置試驗
根據ISO13674 標準,汽車以100 km/h 的車速做正弦曲線蛇形行駛,正弦運動周期為5 s,最大側向加速度為0.2 g。方向盤轉角輸入如圖4 所示。

圖4 轉向盤轉角輸入
在仿真過程中,設置PSO 的參數為:慣性因子ω=0.6,加速常數c1=c2=2,維數為3,粒子群規模為100,最大迭代次數為100,最小適應值為0.1,速度范圍為[-1,1],待優化參數Kp、Ki和Kd的取值范圍均為[0,300]。
為驗證PSO 優化PID 控制器的效果,選取通過試湊法確定參數的PID 控制器以及同類型的尋優算法—遺傳算法(genetic algorithm,GA)優化PID 控制器作為比較對象,GA 參數設置為:種群大小為100,精英個數為10,交叉后代比例0.6,變異函數為約束自適應變異,最大進化代數為100,適應度函數偏差為1×10-100,待優化參數范圍也是[0,300]。通過試湊法反復確定的PID 控制器參數為Kp=20,Ki=10,Kd=3。
根據動力模型計算出目標回正力矩,在PSO優化PID 控制器參數時,控制器的參數變化如圖5所示。最終確定的控制器參數Kp=116.4,Ki=287.6,Kd=30.5,ITAE 值為0.383 3。GA 優化后的控制器參數Kp=146.9,Ki=282.4,Kd=19.7,ITAE 值為0.384 6。目標力矩跟蹤效果如圖6所示。

圖5 PSO 優化PID 控制器參數變化曲線
通過圖6 可以看出,使用PID 控制路感電機,可以較好地對目標回正力矩進行跟隨。在局部放大圖中,可以發現通過試湊法確定參數的PID 控制跟隨效果要比其他2 種尋優算法確定參數的PID 控制效果要差。使用GA 優化的PID 控制器與PSO 優化的控制器,雖然評價ITAE 指標值幾乎一致,但在局部放大圖中,可以看出仍然不如PSO優化后的控制效果好,并且在仿真過程中,GA 優化PID 控制器的過程耗時較長。

圖6 目標力矩跟蹤效果
基于PSO 優化控制器進行轉向盤中間位置操縱穩定性試驗。仿真得到的方向盤轉矩與側向加速度的關系如圖7 所示。

圖7 汽車側向加速度與轉向盤轉矩關系
圖7 中標注[18]有以下幾點:
1)轉矩為0 時的側向加速度,表征了汽車的回正性能,仿真得到的該點側向加速度為-0.096 g。
2)0 g 處的轉向盤轉矩,表征了轉向系統中的庫倫干摩擦,仿真得到的該點轉向盤轉矩為1.69 N·m。
3)0 g 處的轉向盤轉矩梯度,是0 g 處轉向盤轉矩隨汽車側向加速度的變化率,表征了“路感”,仿真得到該點的值為15.5 N·m/(9.8 m·s-2)。
4)0.1 g 處的轉向盤轉矩,代表方向盤力的大小,仿真得到該點的轉向盤轉矩為2.42 N·m。
5)0.1 g 處的轉向盤轉矩梯度,表示剛離開直線行駛狀況的“路感”,仿真得到該點值為6.9 N·m/(9.8 m·s-2)。
仿真結果與傳統轉向系統車輛的中間位置操縱實驗結果[18]見表2 所示。
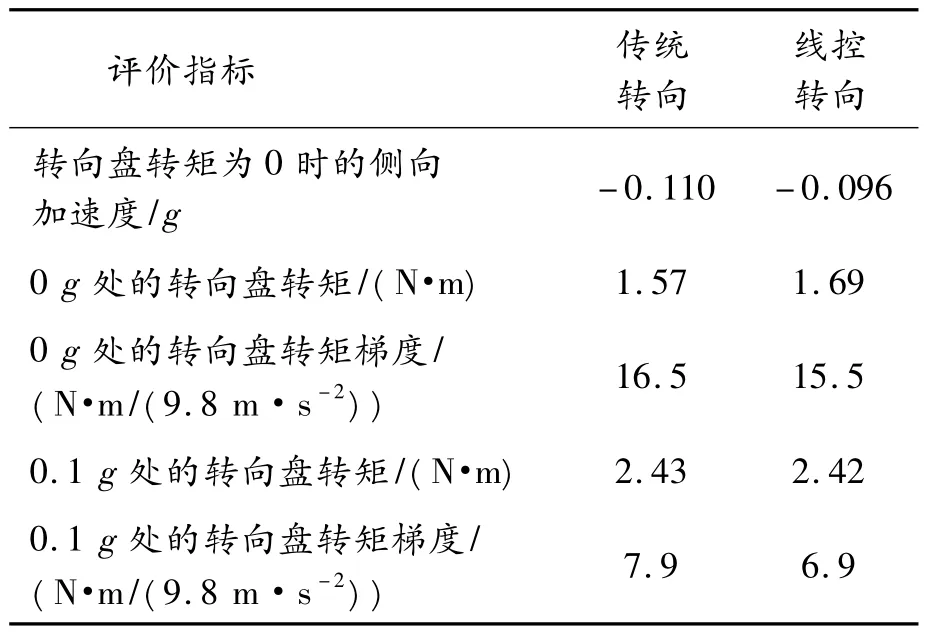
表2 車輛評價指標對比
通過表2 數值對比分析,可以得出,線控轉向系統得到的“路感”與傳統轉向系統評價數值是接近的,即可以說明兩者的“路感”體驗是類似的。
3.2 實車試驗
以配有傳統轉向系統的純電動汽車為對象,驗證線控轉向系統的路感反饋控制策略。利用RMS 方向盤轉矩轉角傳感器、VBOX3i、輪速感器及HIOKI1 存儲記錄儀等設備構建整車測試系統。其中VBOX3i 用來測定車輛的行駛車速;轉矩轉角傳感器的轉角測量范圍是-1 000°~1 000°,轉矩測量范圍是-100~100 N·m。試驗設備如圖8所示。

圖8 試驗儀器設備實物圖
進行原地轉向實驗,轉向盤轉矩與轉角的關系如圖9 所示。可以看出,線控轉向系統與傳統轉向系統相比,在達到最大轉向盤轉角時,駕駛員所提供的轉向力矩大小是接近的,即轉向過程中所遇到的轉向阻力矩大小是接近的,可以說明所提出的路感控制策略可以提供駕駛員原車轉向系統相類似的路感體驗。
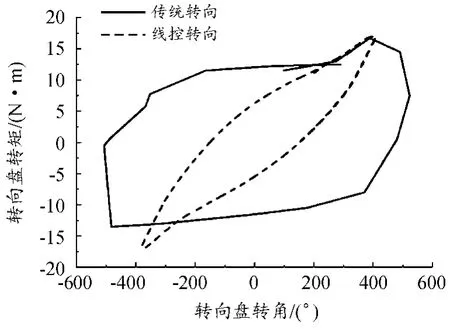
圖9 汽車原地轉向轉矩與轉角關系
試驗車輛低速行駛狀態下,VBOX3i 測得車輛行駛車速如圖10 所示。

圖10 車輛低速行駛時車速
在執行轉向操作時,利用RMS 方向盤傳感器測得原車轉向系統的轉向盤轉矩轉角對應關系與線控轉向系統的對應關系如圖11 所示。

圖11 汽車低速行駛時轉矩轉角關系
根據圖11 可以看出:車輛在低速行駛狀態下執行轉向操作時,線控轉向系統與傳統轉向系統相比,在達到最大轉向盤轉角時,駕駛員所提供的轉向力矩大小是接近的,即轉向過程中所遇到的轉向阻力矩大小是接近的,可以說明所提出的路感控制策略可以提供駕駛員原車轉向系統相類似的路感體驗。
4 結論
使用路感電機模擬轉向阻力矩,搭建了線控轉向汽車模型。通過中間位置操縱試驗,證明了粒子群算法優化PID 控制器精度更高,跟隨效果更好,優于遺傳算法優化PID 控制器。在實車進行原地轉向和低速轉向試驗時,所遇到的轉向阻力矩大小與傳統轉向系統數值相近,驗證了線控轉向系統路感反饋控制策略的有效性。駕駛員執行轉向操作,可以獲得與傳統轉向汽車相似的“路感”體驗。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34