一種結(jié)合深度學(xué)習(xí)的運(yùn)動(dòng)重檢測(cè)視覺(jué)SLAM 算法
2022-05-14 03:27:48房立金王科棋
計(jì)算機(jī)工程 2022年5期
關(guān)鍵詞:檢測(cè)
房立金,王科棋
(東北大學(xué)機(jī)器人科學(xué)與工程學(xué)院,沈陽(yáng) 110169)
0 概述
同步定位與建圖(Simultaneous Localization and Mapping,SLAM)是指在沒(méi)有周圍環(huán)境先驗(yàn)信息的條件下,僅從機(jī)載傳感器獲取周圍環(huán)境信息同時(shí)完成自身位姿估計(jì)和環(huán)境地圖構(gòu)建的工作。SLAM 技術(shù)在智能機(jī)器人實(shí)時(shí)定位、導(dǎo)航、自動(dòng)駕駛、增強(qiáng)現(xiàn)實(shí)/虛擬現(xiàn)實(shí)等方面有著極其重要的應(yīng)用。而視覺(jué)傳感器具有成本低廉、提供數(shù)據(jù)信息豐富等特點(diǎn),所以視覺(jué)SLAM 得到了研究人員的廣泛關(guān)注。很多團(tuán)隊(duì)已經(jīng)從不同的角度對(duì)視覺(jué)SLAM 問(wèn)題進(jìn)行了討論,其中一些優(yōu)秀的成果極大地推進(jìn)了視覺(jué)SLAM的發(fā)展,例如LSD-SLAM[1]、DSΟ[2]、ΟRB-SLAM2[3]、VINS-Mono[4]等,但是為了簡(jiǎn)化計(jì)算,這些算法都是在靜態(tài)環(huán)境假設(shè)基礎(chǔ)上進(jìn)行的。由于忽略了現(xiàn)實(shí)場(chǎng)景中運(yùn)動(dòng)物體對(duì)視覺(jué)SLAM 算法所帶來(lái)的影響,這些模型很難適應(yīng)復(fù)雜多變的真實(shí)場(chǎng)景。因此,針對(duì)動(dòng)態(tài)環(huán)境下的視覺(jué)SLAM 算法進(jìn)行研究就顯得尤為重要。現(xiàn)階段動(dòng)態(tài)環(huán)境SLAM 算法主要通過(guò)處理動(dòng)態(tài)物體來(lái)減少其對(duì)系統(tǒng)精度的影響。
運(yùn)動(dòng)物體檢測(cè)方法可分為基于多視圖幾何的方法和基于深度學(xué)習(xí)的方法。基于多視圖幾何方法一般通過(guò)光流、對(duì)極幾何約束、最小化重投影誤差等檢測(cè)運(yùn)動(dòng)物體。CENG 等[5]采用光流方法計(jì)算圖像序列相鄰幀之間像素運(yùn)動(dòng)。如果相機(jī)運(yùn)動(dòng)與動(dòng)態(tài)物體存在運(yùn)動(dòng)一致性問(wèn)題,則這種方法可能會(huì)失敗。SUN 等[6]使用深度圖提供的深度信息識(shí)別出明顯的運(yùn)動(dòng)物體,此方法受限于傳感器檢測(cè)范圍和分辨率,無(wú)法適應(yīng)復(fù)雜環(huán)境。LI 等[7]利用深度圖進(jìn)行邊緣提取,根據(jù)具有相似運(yùn)動(dòng)的點(diǎn)進(jìn)行分組和分配概率來(lái)識(shí)別動(dòng)態(tài)對(duì)象,但是它們具有較高的計(jì)算成本,并且在嘈雜環(huán)境或退化運(yùn)動(dòng)中無(wú)法正常地工作。浙江大學(xué)章國(guó)峰團(tuán)隊(duì)[8]提出的RDSLAM 算法[9]能夠在動(dòng)態(tài)環(huán)境中穩(wěn)定運(yùn)行,該算法的主要貢獻(xiàn)是提出一種在線更新關(guān)鍵幀的方法,從而及時(shí)剔除環(huán)境中的運(yùn)動(dòng)物體,同時(shí)通過(guò)改進(jìn)傳統(tǒng)隨機(jī)一致性采樣(Random Sample Consensus,RANSAC)算法[10],提出一種自適應(yīng)RANSAC 算法,在剔除大量外點(diǎn)情況下保證算法魯棒性。
基于深度學(xué)習(xí)的方法在近年來(lái)開始興起,清華大 學(xué)CHAΟ 等[11]針對(duì)動(dòng) 態(tài)環(huán)境提出DS-SLAM 算法,該算法基于ΟRB-SLAM2 框架加入實(shí)時(shí)語(yǔ)義分割線程,將語(yǔ)義分割與對(duì)極幾何約束方法相結(jié)合,過(guò)濾出場(chǎng)景中的動(dòng)態(tài)特征。但是對(duì)極幾何計(jì)算的基礎(chǔ)矩陣容易受外點(diǎn)影響,從而影響算法的精度。BESCΟS 等[12]同樣基 于ΟRB-SLAM2 框架提出了DynaSLAM 算法,該算法融合語(yǔ)義分割和多視圖幾何的方法檢測(cè)場(chǎng)景中的運(yùn)動(dòng)特征,但語(yǔ)義分割算法模型復(fù)雜度過(guò)高無(wú)法滿足實(shí)時(shí)性的需求。ZHANG等[13]基于深度學(xué)習(xí)目標(biāo)檢測(cè)算法提出動(dòng)態(tài)場(chǎng)景下基于特征點(diǎn)法的視覺(jué)SLAM 算法,該算法能夠提高跟蹤精度和地圖適應(yīng)性。
MINA 等[14]提出一種基于特征的、無(wú)模型的、可感知對(duì)象的動(dòng)態(tài)SLAM 算法Dynamic SLAM,其利用語(yǔ)義分割來(lái)估計(jì)場(chǎng)景中剛性對(duì)象的運(yùn)動(dòng),而無(wú)需估計(jì)對(duì)象的姿勢(shì)或具有任何先驗(yàn)知識(shí)的3D 模型。該算法生成動(dòng)態(tài)和靜態(tài)結(jié)構(gòu)圖,并能夠提取場(chǎng)景中剛性移動(dòng)物體的速度。BESCΟS 等[15]基于DynaSLAM 提出新一代視覺(jué) SLAM 系統(tǒng)DynaSLAM II,其利用實(shí)例語(yǔ)義分割和ΟRB 特征來(lái)跟蹤動(dòng)態(tài)對(duì)象,并將靜態(tài)場(chǎng)景和動(dòng)態(tài)對(duì)象的結(jié)構(gòu)放在捆綁調(diào)整(Bundle Adjustment,BA)中與攝像機(jī)的運(yùn)行軌跡同時(shí)進(jìn)行優(yōu)化,并且三維運(yùn)動(dòng)對(duì)象的3D 邊界框也可以在固定的時(shí)間窗口內(nèi)進(jìn)行估算和粗略優(yōu)化。ZHANG 等[16]基于機(jī)器學(xué)習(xí)及深度學(xué)習(xí)提出RGB-D SLAM 算法來(lái)適應(yīng)動(dòng)態(tài)場(chǎng)景,提升視覺(jué)SLAM 在動(dòng)態(tài)場(chǎng)景中的精度。但是,該算法占用計(jì)算機(jī)資源較大無(wú)法滿足實(shí)時(shí)性的需求。
綜上,現(xiàn)有動(dòng)態(tài)環(huán)境SLAM 算法雖然能夠解決部分動(dòng)態(tài)場(chǎng)景問(wèn)題,但是現(xiàn)有算法仍然存在模型復(fù)雜度高、計(jì)算量過(guò)大、應(yīng)用范圍有限、無(wú)法保證實(shí)時(shí)性等問(wèn)題,且只進(jìn)行一次運(yùn)動(dòng)物體判定,一旦判定失效則無(wú)法保證視覺(jué)里程計(jì)的穩(wěn)定運(yùn)行,從而影響整個(gè)SLAM 算法的運(yùn)行精度。本文在保證計(jì)算量和實(shí)時(shí)性的同時(shí),針對(duì)室內(nèi)動(dòng)態(tài)場(chǎng)景,提出一種基于深度學(xué)習(xí)和多視圖幾何的兩階段運(yùn)動(dòng)物體檢測(cè)優(yōu)化算法,以提高視覺(jué)SLAM 算法的運(yùn)行精度和運(yùn)行效率。
1 系統(tǒng)流程與框架
本文系統(tǒng)框架如圖1 所示,按照系統(tǒng)運(yùn)行流程可分為跟蹤線程、局部建圖線程、回環(huán)檢測(cè)3 個(gè)線程。輸入的RGB-D 圖像序列,針對(duì)RGB 通道利用深度學(xué)習(xí)目標(biāo)檢測(cè)算法進(jìn)行先驗(yàn)的運(yùn)動(dòng)物體預(yù)檢測(cè),并采用多視圖幾何算法進(jìn)行運(yùn)動(dòng)物體重檢測(cè),確定真正產(chǎn)生運(yùn)動(dòng)的物體。在跟蹤線程中,首先針對(duì)這些動(dòng)態(tài)物體相對(duì)應(yīng)的關(guān)鍵點(diǎn)進(jìn)行語(yǔ)義數(shù)據(jù)關(guān)聯(lián),添加相應(yīng)的運(yùn)動(dòng)狀態(tài)。然后通過(guò)最小化重投影誤差進(jìn)行相機(jī)位姿估計(jì),完成視覺(jué)里程計(jì)初始化,同時(shí)跟蹤局部地圖。最后根據(jù)本文提出的關(guān)鍵幀選取策略,在局部建圖線程中插入候選關(guān)鍵幀,根據(jù)所插入關(guān)鍵幀中跟蹤的空間地圖點(diǎn)完成局部地圖更新。同時(shí)在后端優(yōu)化過(guò)程中執(zhí)行局部光束平差(BA)法完成相機(jī)位姿優(yōu)化。
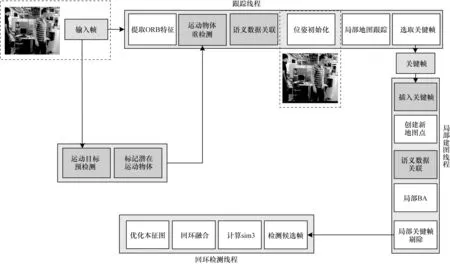
圖1 本文系統(tǒng)流程與框架Fig.1 Procedure and framework of this system
回環(huán)檢測(cè)線程將每一次插入的關(guān)鍵幀與之前存儲(chǔ)的關(guān)鍵幀進(jìn)行匹配。如果檢測(cè)到環(huán)境中的閉環(huán)則計(jì)算關(guān)于相機(jī)位姿累計(jì)誤差的相似性變換。由于本文回環(huán)檢測(cè)過(guò)程主要參考ΟRB-SLAM2 的檢測(cè)過(guò)程,因此本文不再贅述。
2 融合運(yùn)動(dòng)檢測(cè)的視覺(jué)SLAM 算法
2.1 目標(biāo)檢測(cè)
本文將基于改進(jìn)的SSD[17]網(wǎng)絡(luò)作為解決實(shí)時(shí)目標(biāo)檢測(cè)的方案,考慮到移動(dòng)機(jī)器人所搭載的計(jì)算平臺(tái)具有運(yùn)算能力相對(duì)較差、計(jì)算量不足等問(wèn)題,為減輕網(wǎng)絡(luò)參數(shù)量,采用MobileNet[18]網(wǎng)絡(luò)替換原來(lái)SSD 網(wǎng)絡(luò)中VGG-16[19]特征提取主干網(wǎng)絡(luò),在保證檢測(cè)精度相對(duì)準(zhǔn)確的同時(shí)能夠滿足目標(biāo)檢測(cè)器實(shí)時(shí)運(yùn)行的需求,網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)為全卷積網(wǎng)絡(luò)結(jié)構(gòu),如圖2 所示。
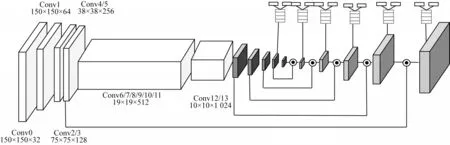
圖2 全卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.2 Fully convolutional neural network structure
為了提高小目標(biāo)物體檢測(cè)精度,本文采用Deconvoluational 模塊并 借鑒FPN[20]網(wǎng)絡(luò) 結(jié)構(gòu),將 深層特征圖和淺層特征圖進(jìn)行信息融合,融合后的特征圖同時(shí)具有深層特征圖的語(yǔ)義信息和淺層特征圖位置信息。Decorder 部分主要借鑒了DSSD[21]的網(wǎng)絡(luò)結(jié)構(gòu),經(jīng)過(guò)在特征圖上進(jìn)行1×1 的卷積后得到兩個(gè)支路,一個(gè)用于分類,另一個(gè)用于回歸。進(jìn)行此操作的主要目的是更多地利用深層網(wǎng)絡(luò)特征。
針對(duì)室內(nèi)場(chǎng)景目標(biāo)檢測(cè),本文在MS CΟCΟ[22]數(shù)據(jù)集上對(duì)MobileNet-SSD 進(jìn)行預(yù)訓(xùn)練,MS CΟCΟ 包含91 種不同的物體,其中包含人、貓、桌子、椅子等室內(nèi)常見的物體。
2.2 運(yùn)動(dòng)物體預(yù)檢測(cè)
本文采用上述深度學(xué)習(xí)目標(biāo)檢測(cè)網(wǎng)絡(luò)進(jìn)行運(yùn)動(dòng)物體預(yù)檢測(cè),即認(rèn)定環(huán)境中潛在的運(yùn)動(dòng)物體。根據(jù)目標(biāo)檢測(cè)網(wǎng)絡(luò)提供潛在運(yùn)動(dòng)物體的二維位置信息,對(duì)潛在運(yùn)動(dòng)物體相對(duì)應(yīng)的特征點(diǎn)進(jìn)行運(yùn)動(dòng)狀態(tài)預(yù)標(biāo)記。
首先根據(jù)Bounding Box 所提供運(yùn)動(dòng)物體的二維坐標(biāo)(Px,Py,Pw,Ph)確定動(dòng)態(tài)目標(biāo)的位置,其中Px、Py與Pw、Ph分別表示檢測(cè)框中心點(diǎn)坐標(biāo)以及寬度和高度。根據(jù)這些信息能夠計(jì)算出Bounding Box 的最大、最小坐標(biāo)(umax,umax,umin,umin)。相機(jī)輸入的圖像I提取到的關(guān)鍵點(diǎn)的二維坐標(biāo)定義為pi=(ui,νi),通過(guò)與(umax,umax,umin,umin)對(duì)比得到取值在最大、最小坐標(biāo)區(qū)間內(nèi)的特征點(diǎn)。將每一個(gè)Bounding Box 根據(jù)關(guān)鍵點(diǎn)數(shù)量進(jìn)行編號(hào)排序并將檢測(cè)框內(nèi)的特征點(diǎn)pi對(duì)應(yīng)歸為一類,即pi∈Boxi。同時(shí)所有的Boxi均屬于Box 潛在運(yùn)動(dòng)物體類,即Box1,Box2,…,Boxi∈Box。
為了提高檢測(cè)精度,同時(shí)減少計(jì)算量,本文只計(jì)算關(guān)鍵幀的數(shù)據(jù)并且目標(biāo)檢測(cè)置信度大于默認(rèn)閾值的Bounding Box(本文默認(rèn)設(shè)置為0.7)內(nèi)的特征點(diǎn)。通過(guò)上述過(guò)程能夠得到環(huán)境中潛在的運(yùn)動(dòng)物體并分類得到潛在運(yùn)動(dòng)物體類Box,完成運(yùn)動(dòng)物體預(yù)檢測(cè)與運(yùn)動(dòng)狀態(tài)預(yù)標(biāo)記過(guò)程。
2.3 運(yùn)動(dòng)物體重檢測(cè)
本節(jié)針對(duì)運(yùn)動(dòng)物體預(yù)檢測(cè)得到的潛在運(yùn)動(dòng)物體類中的運(yùn)動(dòng)對(duì)象進(jìn)行運(yùn)動(dòng)物體重檢測(cè),兩次確認(rèn)這些物體是否產(chǎn)生實(shí)際運(yùn)動(dòng),并將實(shí)際產(chǎn)生運(yùn)動(dòng)的物體所對(duì)應(yīng)的特征點(diǎn)添加相應(yīng)的運(yùn)動(dòng)狀態(tài)。
在三維空間中,運(yùn)動(dòng)物體產(chǎn)生的像素運(yùn)動(dòng)與相機(jī)自身運(yùn)動(dòng)所產(chǎn)生的像素運(yùn)動(dòng)具有不同的運(yùn)動(dòng)方向。由于運(yùn)動(dòng)三維物體對(duì)應(yīng)在二維圖像中會(huì)產(chǎn)生不同的動(dòng)態(tài)視差di,因此本文采用像素之間投影點(diǎn)的距離,即像素間的重投影誤差di對(duì)動(dòng)態(tài)視差進(jìn)行度量。像素間的重投影誤差主要取決于:
1)動(dòng)態(tài)物體對(duì)應(yīng)特征點(diǎn)的像素坐標(biāo)。
2)動(dòng)態(tài)物體對(duì)應(yīng)特征點(diǎn)的深度。
3)運(yùn)動(dòng)物體與相機(jī)運(yùn)動(dòng)之間的相對(duì)運(yùn)動(dòng)角度。
為減少計(jì)算量,本文只計(jì)算Bounding Box 中匹配關(guān)鍵點(diǎn)像素間重投影誤差di,定義如下:

其中:pi表示三維空間中相對(duì)應(yīng)空間點(diǎn)Pi在當(dāng)前幀中關(guān)鍵點(diǎn)的二維坐標(biāo)表示通過(guò)前一幀匹配關(guān)鍵點(diǎn)在當(dāng)前幀恢復(fù)的投影點(diǎn)坐標(biāo);di表示投影點(diǎn)與當(dāng)前幀關(guān)鍵點(diǎn)的重投影誤差。
重投影誤差示意圖如圖3 所示。
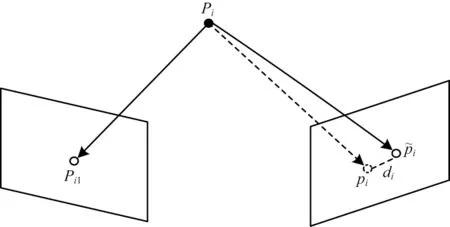
圖3 重投影誤差示意圖Fig.3 Schematic diagram of re-projection error
本文引入可變閾值Δω對(duì)運(yùn)動(dòng)物體進(jìn)行運(yùn)動(dòng)重檢測(cè),閾值大小由微分熵函數(shù)[23]進(jìn)行確定。對(duì)于服從高斯分布的k維微分熵定義如下:

可變閾值Δω=f(H(xi)),當(dāng)計(jì)算得到的動(dòng)態(tài)視差di>Δω時(shí),則被認(rèn)定為實(shí)際產(chǎn)生運(yùn)動(dòng)的動(dòng)態(tài)物體,將相對(duì)應(yīng)的潛在運(yùn)動(dòng)物體類Boxi中所有的特征點(diǎn)添加運(yùn)動(dòng)狀態(tài)ζi=0,表示該特征點(diǎn)在運(yùn)動(dòng)中,非潛在運(yùn)動(dòng)物體類Boxi的特征點(diǎn)和動(dòng)態(tài)視差di>Δω的靜態(tài)物體添加運(yùn)動(dòng)狀態(tài)ζi=1。
2.4 靜態(tài)語(yǔ)義數(shù)據(jù)關(guān)聯(lián)與相機(jī)位姿優(yōu)化
關(guān)鍵點(diǎn)相應(yīng)運(yùn)動(dòng)狀態(tài)添加完成后,并在相機(jī)位姿優(yōu)化過(guò)程中剔除被標(biāo)記為運(yùn)動(dòng)中的關(guān)鍵點(diǎn),不參與到相機(jī)位姿優(yōu)化光束平差法計(jì)算中。
輸入到跟蹤線程中的圖像,經(jīng)過(guò)運(yùn)動(dòng)物體檢測(cè)后利用相鄰兩幀進(jìn)行三角量測(cè)恢復(fù)出地圖點(diǎn),因?yàn)槠鋵?duì)參考幀F(xiàn)r中的特征點(diǎn)和當(dāng)前幀F(xiàn)c特征點(diǎn)完成了特征匹配。
跟蹤線程計(jì)算出本質(zhì)矩陣和單應(yīng)矩陣,如果當(dāng)前場(chǎng)景為平面情況,則采用單應(yīng)矩陣計(jì)算當(dāng)前幀的相機(jī)位姿;如果當(dāng)前場(chǎng)景為非平面情況,則采用基礎(chǔ)矩陣計(jì)算當(dāng)前幀的相機(jī)位姿。
當(dāng)系統(tǒng)初始化成功后,當(dāng)前幀F(xiàn)c利用恒速模型進(jìn)行位姿跟蹤,如果初始化失敗,則重置當(dāng)前參考幀F(xiàn)r與相鄰關(guān)鍵幀進(jìn)行重定位恢復(fù)相機(jī)位姿。本文利用運(yùn)動(dòng)狀態(tài)為靜態(tài)的關(guān)鍵點(diǎn),即運(yùn)動(dòng)狀態(tài)ζi≠0 的特征點(diǎn)進(jìn)行相機(jī)位姿恢復(fù)以及優(yōu)化。因?yàn)楦鶕?jù)ICP[24]算法已經(jīng)得到了N對(duì)相互匹配的3D 點(diǎn)的三維坐標(biāo)Pi和對(duì)應(yīng)投影點(diǎn)的二維坐標(biāo)pi,則對(duì)應(yīng)R、t的當(dāng)前幀相機(jī)位姿坐標(biāo)ξ相機(jī)位姿李代數(shù)的形式為:

其中:?∈R3為相機(jī)旋轉(zhuǎn)坐標(biāo);φ∈sο(3)為相機(jī)平移坐標(biāo)。

2.5 關(guān)鍵幀選擇策略
關(guān)鍵幀的選擇策略影響整個(gè)系統(tǒng)的運(yùn)行精度,同時(shí)局部地圖的質(zhì)量也與關(guān)鍵幀的選擇有密切的關(guān)系,本文關(guān)鍵幀選擇遵循以下規(guī)則:
1)當(dāng)前幀至少跟蹤20 個(gè)以上空間中的三維地圖點(diǎn),同時(shí)當(dāng)前幀內(nèi)特征點(diǎn)數(shù)量不少于相鄰關(guān)鍵幀的90%。
2)當(dāng)前關(guān)鍵幀需要在跟蹤線程中被跟蹤20 次以上,才能夠在局部建圖線程空閑時(shí)插入。
3)當(dāng)前幀相機(jī)位姿與相鄰關(guān)鍵幀的相機(jī)位姿間的旋轉(zhuǎn)姿態(tài)角度不大于設(shè)定閾值。
關(guān)鍵幀選擇條件如下:
1)保證所選擇的候選關(guān)鍵幀跟蹤到空間中數(shù)量足夠多的地圖點(diǎn),并且候選關(guān)鍵幀中提取到的環(huán)境信息足夠豐富。
2)保證所選取的關(guān)鍵幀與相鄰幀有足夠的共視關(guān)系,能夠通過(guò)共視關(guān)鍵幀獲取到盡可能多的環(huán)境信息,并且保證候選關(guān)鍵幀相對(duì)穩(wěn)定提高系統(tǒng)精度。
3)防止相機(jī)在俯仰或轉(zhuǎn)動(dòng)等純旋轉(zhuǎn)情況下,相機(jī)視差發(fā)生較大的變化導(dǎo)致跟蹤失敗,確保選取的候選關(guān)鍵幀穩(wěn)定并且連貫。
2.6 算法復(fù)雜度分析
在未知環(huán)境中,SLAM 問(wèn)題主要解決機(jī)器人自身定位和地圖構(gòu)建問(wèn)題,將此過(guò)程利用數(shù)學(xué)表達(dá)式進(jìn)行描述,可以抽象為狀態(tài)估計(jì)問(wèn)題。假設(shè)移動(dòng)機(jī)器人在未知環(huán)境中連續(xù)運(yùn)動(dòng),在t=0,1,···,N的時(shí)間段內(nèi),有對(duì)應(yīng)運(yùn)動(dòng)機(jī)器人位姿x0,x1,…,xN,機(jī)器人觀測(cè)到的路標(biāo)點(diǎn)y0,y1,···,yN以及在xi點(diǎn)觀測(cè)到路標(biāo)yj對(duì)應(yīng)的信息zi,j。利用以上信息能夠列出SLAM 運(yùn)動(dòng)狀態(tài)估計(jì)過(guò)程中的運(yùn)動(dòng)方程式與觀測(cè)方程式:
其中:ui表示在傳感器讀入數(shù)據(jù);wi與νi,j均為噪聲誤差。融合運(yùn)動(dòng)檢測(cè)視覺(jué)SLAM 算法的運(yùn)算復(fù)雜度和空間復(fù)雜度計(jì)算可以分為以下2 個(gè)部分:
1)將視覺(jué)里程計(jì)中的運(yùn)動(dòng)檢測(cè)算法的時(shí)間復(fù)雜度作為一個(gè)整體進(jìn)行分析,其總體運(yùn)算復(fù)雜度為Ο(n2),空間復(fù)雜度為Ο(n2)。
2)運(yùn)動(dòng)方程和觀測(cè)方程在更新過(guò)程中,其運(yùn)算復(fù)雜度為Ο(n3),空間復(fù)雜度為Ο(n2)。
因此,融合運(yùn)動(dòng)檢測(cè)視覺(jué)SLAM 算法的總體運(yùn)算復(fù)雜度為Ο(n3),空間復(fù)雜度為Ο(n2)。
3 實(shí)驗(yàn)與結(jié)果分析
本文選取TUM RGB-D Benchmark[25]數(shù)據(jù)集,該數(shù)據(jù)集中的某些序列包含運(yùn)動(dòng)對(duì)象,如果不考慮這些運(yùn)動(dòng)對(duì)象,則會(huì)影響軌跡估計(jì)精度。在本文實(shí)驗(yàn)中,使用靜態(tài)環(huán)境序列和屬于動(dòng)態(tài)對(duì)象類別序列的子集來(lái)評(píng)估所提出算法的性能。本文算法在這兩種情況下進(jìn)行性能和精度的測(cè)試,并與ΟRB-SLAM2、DynaSLAM 進(jìn)行對(duì)比。
3.1 視覺(jué)里程計(jì)對(duì)比評(píng)估
本節(jié)實(shí)驗(yàn)主要對(duì)比不同算法之間視覺(jué)里程計(jì)的漂移量,因此采用相對(duì)位姿誤差(Relative Pose Error,RPE)作為評(píng)價(jià)指標(biāo)。相對(duì)軌跡誤差通過(guò)計(jì)算相同時(shí)間段間隔真實(shí)值與估計(jì)值之間變化量的差值進(jìn)行評(píng)估。相對(duì)軌跡誤差在時(shí)間間隔的定義如下:

在不同序列下的比較結(jié)果如表1 所示,表中fr2/desk、fr3/l/house 為靜態(tài)場(chǎng)景序列,fr3/w/half、fr3/w/rpy、fr3/w/static、fr3/w/xyz 為動(dòng)態(tài)場(chǎng)景序列,下文同。其中RMSE 表示均方根誤差,加粗字體為結(jié)果最優(yōu)。它的定義是觀測(cè)值與真實(shí)值之間差的平方和與觀測(cè)次數(shù)比值的平方根。其計(jì)算公式定義如下:

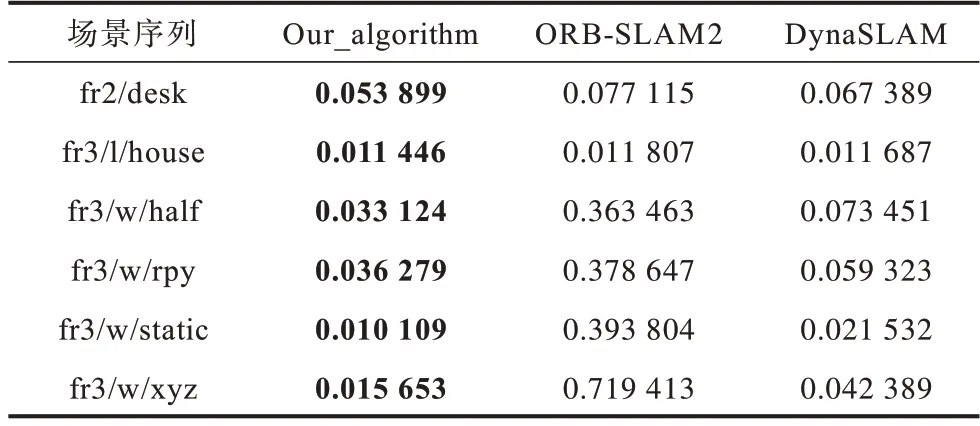
表1 里程計(jì)相對(duì)位姿誤差的RMSE 比較Table 1 RMSE comparison of odometry relative pose error
表2 為相對(duì)位姿誤差的誤差均值(Mean),表3表示相對(duì)位姿誤差的殘差平方和(Sum of Squares due to Error,SSE),其中加粗字體為結(jié)果最優(yōu)。
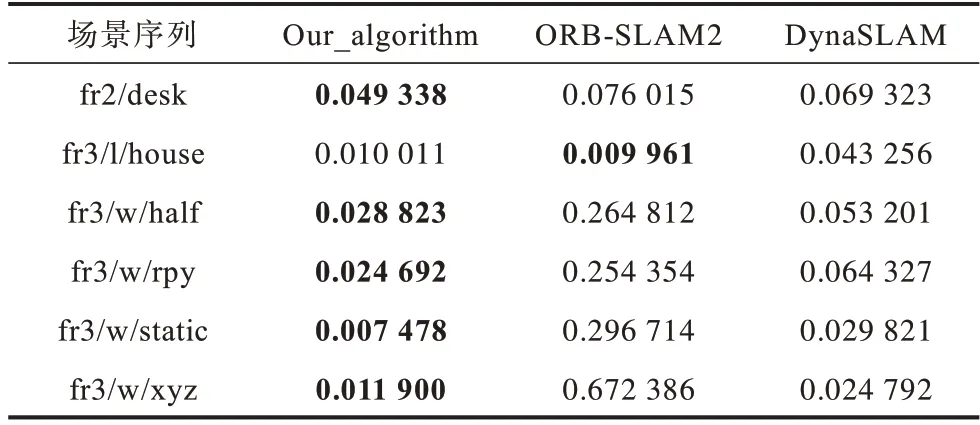
表2 里程計(jì)相對(duì)位姿誤差均值比較Table 2 Mean comparison of odometry relative pose error
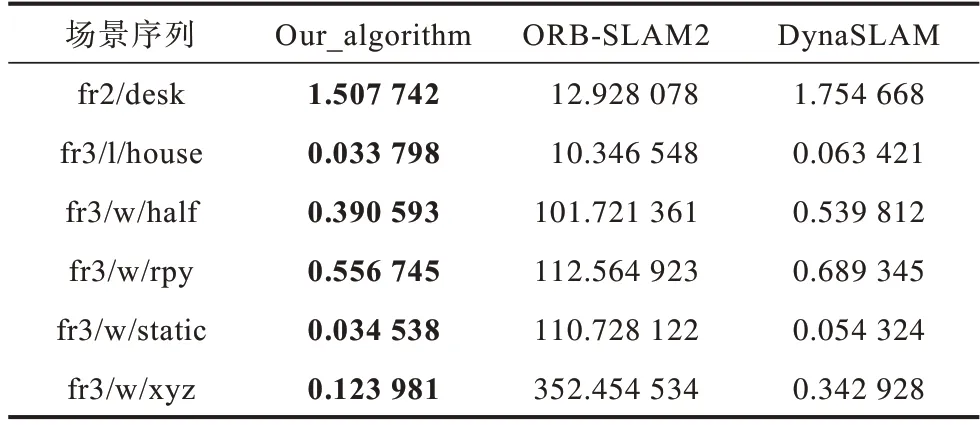
表3 里程計(jì)相對(duì)位姿誤差SSE 比較Table 3 SSE comparison of odometry relative pose error
由表1~表3 誤差信息對(duì)比可知,本文算法在靜態(tài)和動(dòng)態(tài)環(huán)境圖像序列中均取得較好的結(jié)果,在動(dòng)態(tài)環(huán)境序列中的性能均優(yōu)于ΟRB-SLAM2。
通過(guò)在ΟRB-SLAM2 基礎(chǔ)上引入運(yùn)動(dòng)物體檢測(cè)算法可以精確刪除動(dòng)態(tài)關(guān)鍵點(diǎn),使得SLAM 線程不受移動(dòng)對(duì)象的影響。在所有動(dòng)態(tài)序列中,相對(duì)位姿誤差RMSE 均得到了有效的改善。雖然本文算法主要適用于現(xiàn)實(shí)中的動(dòng)態(tài)環(huán)境,但是在靜態(tài)序列中,本文提出的SLAM 算法的性能對(duì)比ΟRB-SLAM2 同樣保持在同一精度水平。
本文算法與ΟRB-SLAM2 的視覺(jué)里程計(jì)相對(duì)位姿誤差對(duì)比如圖4 所示。通過(guò)對(duì)比相對(duì)位姿誤差圖,可知ΟRB-SLAM2 系統(tǒng)在動(dòng)態(tài)場(chǎng)景fr3/w/static、fr3/w/xyz 的誤差很大,與同樣具有運(yùn)動(dòng)物體檢測(cè)算法的DynaSLAM 對(duì)比,本文算法也同樣具有精度優(yōu)勢(shì)。
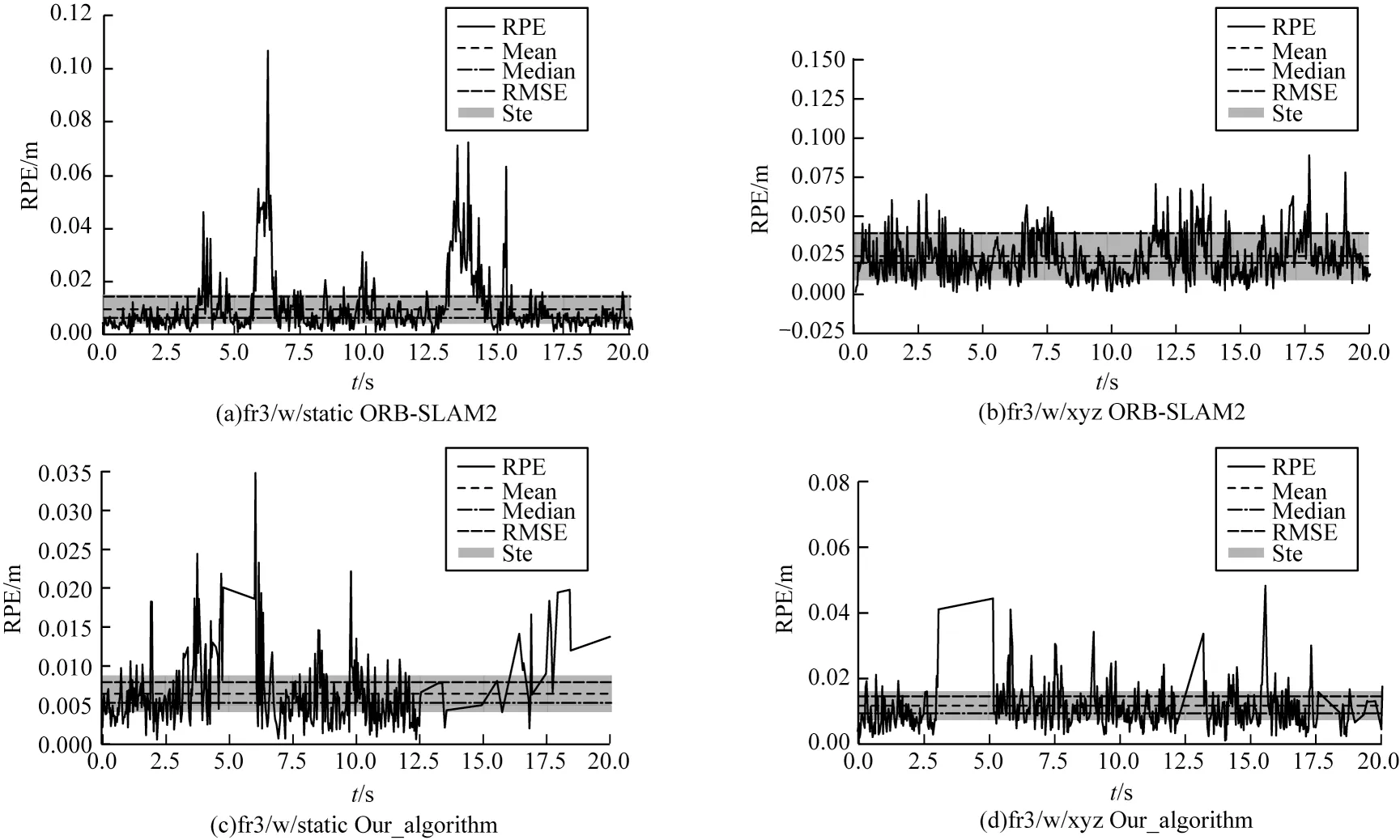
圖4 視覺(jué)里程計(jì)相對(duì)位姿誤差Fig.4 Relative pose error of visual odometry
3.2 SLAM 算法對(duì)比評(píng)估
在評(píng)估SLAM 算法實(shí)驗(yàn)部分,本文采用絕對(duì)軌跡誤差(Absolute Trajectory Error,ATE)作為評(píng)價(jià)指標(biāo),該指標(biāo)通過(guò)對(duì)比真實(shí)值與估計(jì)值之間的差異來(lái)進(jìn)行評(píng)估,適用于估計(jì)機(jī)器人運(yùn)動(dòng)軌跡誤差。絕對(duì)軌跡誤差dj計(jì)算公式定義如下:

其中:xj表示估計(jì)軌跡表示真實(shí)軌跡。
表4 為算法絕對(duì)軌跡誤差的均方根誤差對(duì)比,表5 為算法絕對(duì)軌跡誤差的誤差均值對(duì)比,表6 為算法絕對(duì)軌跡誤差的殘差平方和對(duì)比。對(duì)比表4~表6可知,ΟRB-SLAM2 算法 在fr2/desk 和fr3/l/house 兩種靜態(tài)場(chǎng)景圖像序列下,絕對(duì)軌跡誤差相對(duì)較小,但與本文算法相比仍有差距。
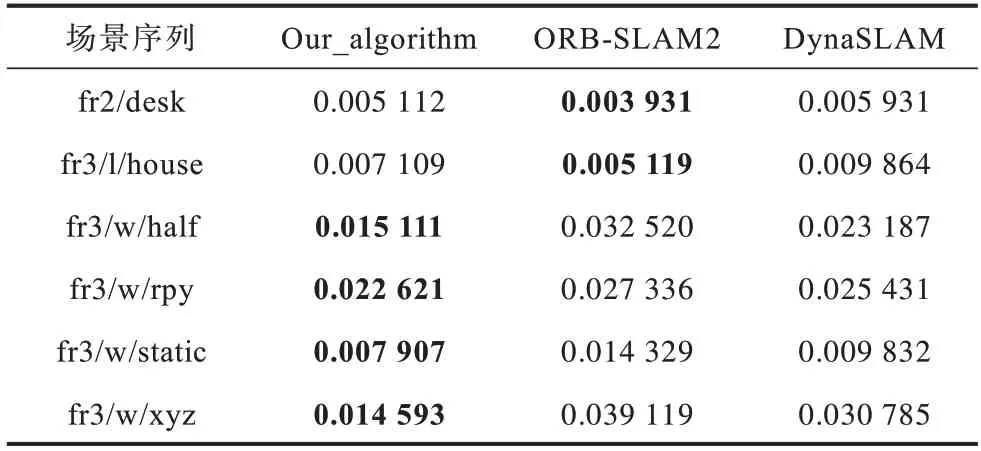
表4 不同算法絕對(duì)軌跡誤差的RMSE 對(duì)比Table 4 RMSE comparison of absolute trajectory errors of different algorithms
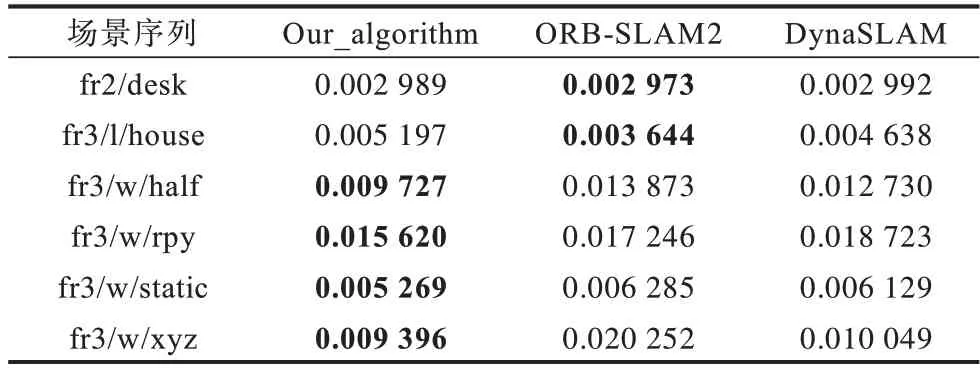
表5 不同算法絕對(duì)軌跡誤差均值對(duì)比Table 5 Comparison of mean absolute trajectory errors of different algorithms
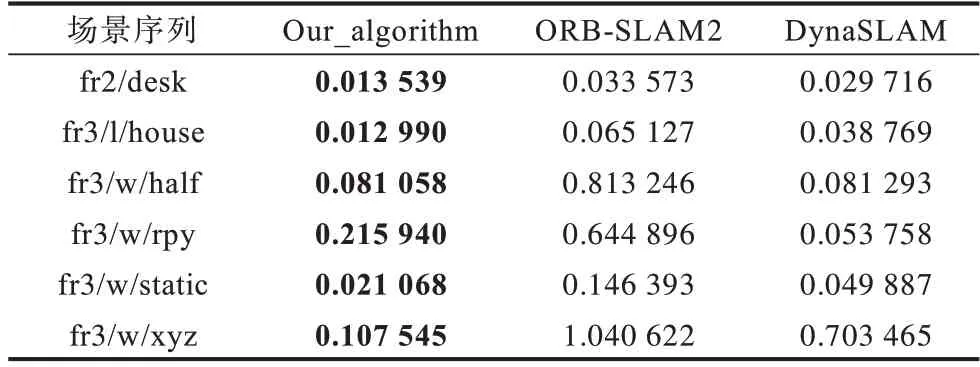
表6 不同算法絕對(duì)軌跡誤差的SSE 對(duì)比Table 6 SSE comparison of absolute trajectory errors of different algorithms
對(duì)比表4~表6 可知,本文算法相比DynaSLAM在4 種不同相機(jī)運(yùn)動(dòng)的動(dòng)態(tài)環(huán)境圖像子序列上的ATE 指標(biāo)也取得了更小的誤差值,算法精度更高。
圖5 對(duì)比了ΟRB-SLAM2 和本文算法在TUM 數(shù)據(jù)集中fr3/w/xyz 和fr3/w/static 兩個(gè)動(dòng)態(tài)環(huán)相機(jī)位姿估計(jì)結(jié)果發(fā)生很大的偏移,最大ATE 值達(dá)到1.2 m 以上。本文算法針對(duì)運(yùn)動(dòng)物體進(jìn)行處理后軌跡估計(jì)更加精準(zhǔn),誤差大幅降低。
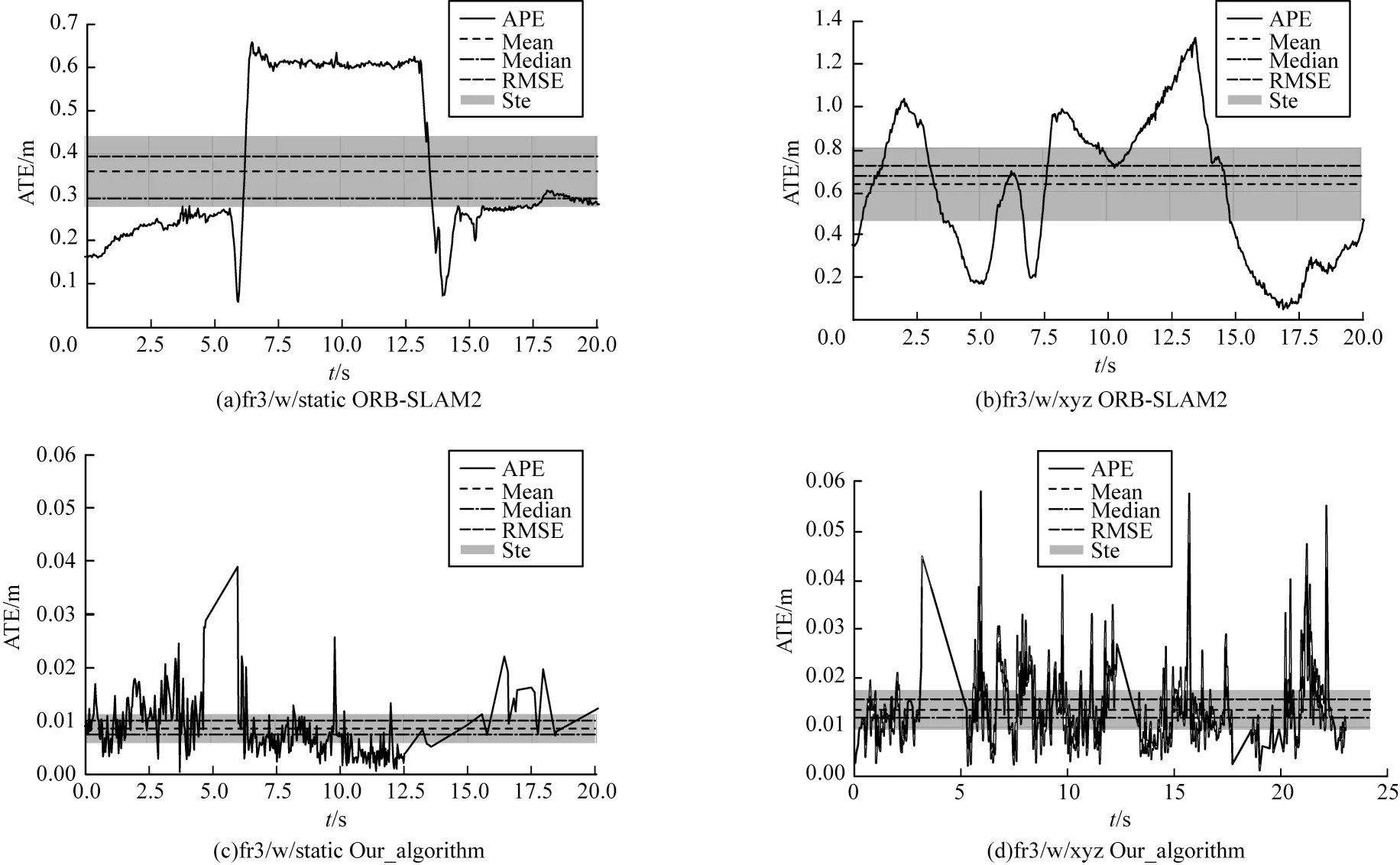
圖5 算法絕對(duì)軌跡誤差對(duì)比Fig.5 Comparison of algorithm absolute trajectory errors
圖6 表示ΟRB-SLAM2 與本文算法在動(dòng)態(tài)序列下預(yù)測(cè)值與真實(shí)值之間的軌跡誤差。其中圖6(a)、圖6(b)為ΟRB_SLAM2 算法軌 跡誤差,圖6(c)、圖6(d)為本文算法軌跡誤差。通過(guò)對(duì)比可知,本文針對(duì)運(yùn)動(dòng)物體剔除后算法更加魯棒,運(yùn)行軌跡更加接近真實(shí)值。
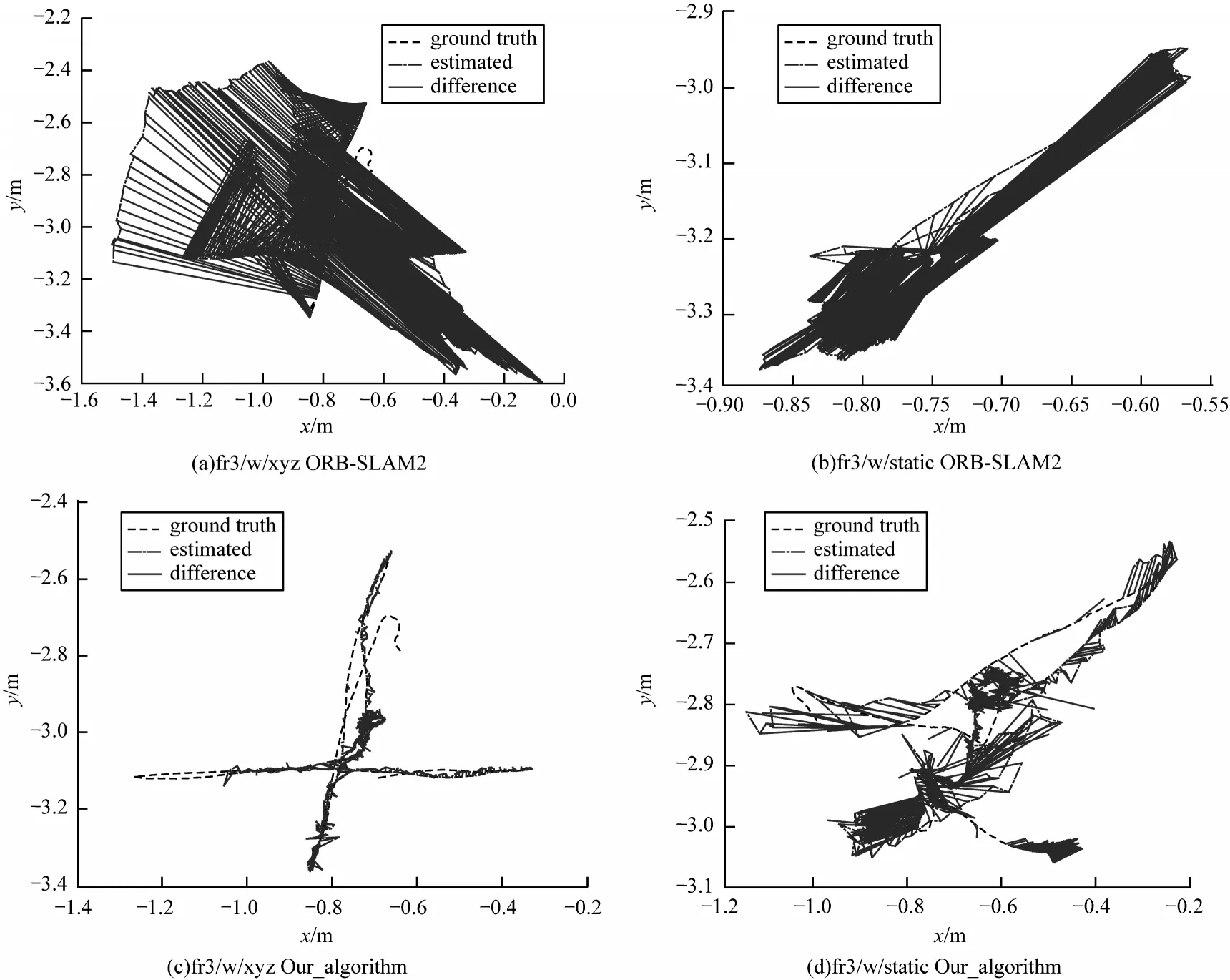
圖6 算法軌跡誤差Fig.6 Algorithms trajectory error
在驗(yàn)證算法魯棒性方面,本文采用TUM 數(shù)據(jù)集中包含移動(dòng)物體的fr3/Walking 動(dòng)態(tài)序列驗(yàn)證。Walking 子序列中包含兩個(gè)移動(dòng)的人,在前景和背景中不斷運(yùn)動(dòng)。該圖像序列中包含4 種不同相機(jī)運(yùn)動(dòng):
1)fr3/w/xyz 子序列表示相機(jī)沿X-Y-Z軸(XYZ)移動(dòng)。
2)fr3/w/half 子序列表示相機(jī)沿半徑為0.5 m 的半球面(half)軌跡運(yùn)動(dòng)。
3)fr3/w/static 子序列表示相機(jī)保持靜止(static)狀態(tài)。
4)fr3/w/rpy 子序列表示相機(jī)在俯仰、翻滾和偏航軸上旋轉(zhuǎn)(RPY)運(yùn)動(dòng)。
本文算法分別在上述4 個(gè)不同相機(jī)運(yùn)動(dòng)的數(shù)據(jù)集上實(shí)驗(yàn)驗(yàn)證,在應(yīng)對(duì)不同相機(jī)運(yùn)動(dòng)的過(guò)程中本文算法運(yùn)行精度對(duì)比ΟRB-SLAM2、DynaSLAM 表現(xiàn)最優(yōu)。在應(yīng)對(duì)4 種不同相機(jī)運(yùn)動(dòng)的動(dòng)態(tài)場(chǎng)景中,本文平均絕對(duì)軌跡誤差相對(duì)于DynaSLAM 有明顯提升。
3.3 系統(tǒng)實(shí)時(shí)性評(píng)估
利用TUM 數(shù)據(jù)集中提供的多種不同場(chǎng)景下的連續(xù)圖像對(duì)本文系統(tǒng)實(shí)時(shí)性進(jìn)行測(cè)試。測(cè)試圖片分辨率為640×480 像素,系統(tǒng)中只有跟蹤線程需要對(duì)輸入的圖像進(jìn)行實(shí)時(shí)處理。
本文實(shí)驗(yàn)采用INTER i5 CPU、內(nèi)存8 GB、NVIDIA 1060TI GPU、顯存6 GB 進(jìn)行實(shí)驗(yàn)。測(cè)試結(jié)果如表7 所示,算法平均耗時(shí)0.025 s,本文改進(jìn)后的視覺(jué)SLAM 算法的跟蹤線程平均處理速度能夠達(dá)到6 frame/s,基本滿足實(shí)時(shí)性的需求。

表7 跟蹤線程耗時(shí)對(duì)比Table 7 Comparison of tracking thread time s
表7 表示本文算法與DynaSLAM 跟蹤線程中所消耗的時(shí)間對(duì)比。在與DynaSLAM 在相同實(shí)驗(yàn)設(shè)備運(yùn)行動(dòng)態(tài)環(huán)境序列時(shí),本文算法相較于前者跟蹤速度提升了10 倍以上,滿足室內(nèi)環(huán)境實(shí)時(shí)跟蹤的需求。
由于實(shí)際場(chǎng)景中移動(dòng)機(jī)器人搭載的設(shè)備計(jì)算能力有限,DynaSLAM 算法是結(jié)合深度學(xué)習(xí)語(yǔ)義分割與多視圖幾何完成運(yùn)動(dòng)物體剔除。由于計(jì)算資源有限,在一些情況下語(yǔ)義分割無(wú)法實(shí)時(shí)完成,采用多視圖幾何進(jìn)行運(yùn)動(dòng)檢測(cè),這樣會(huì)使一些特征點(diǎn)剔除失敗,導(dǎo)致精度降低。本文算法所需計(jì)算資源相對(duì)較小,同時(shí)完成兩次運(yùn)動(dòng)物體檢測(cè),提高了SLAM 算法的運(yùn)行精度。本文算法對(duì)比ΟRB-SLAM2 與DynaSLAM 算法特征提取結(jié)果如圖7 所示。
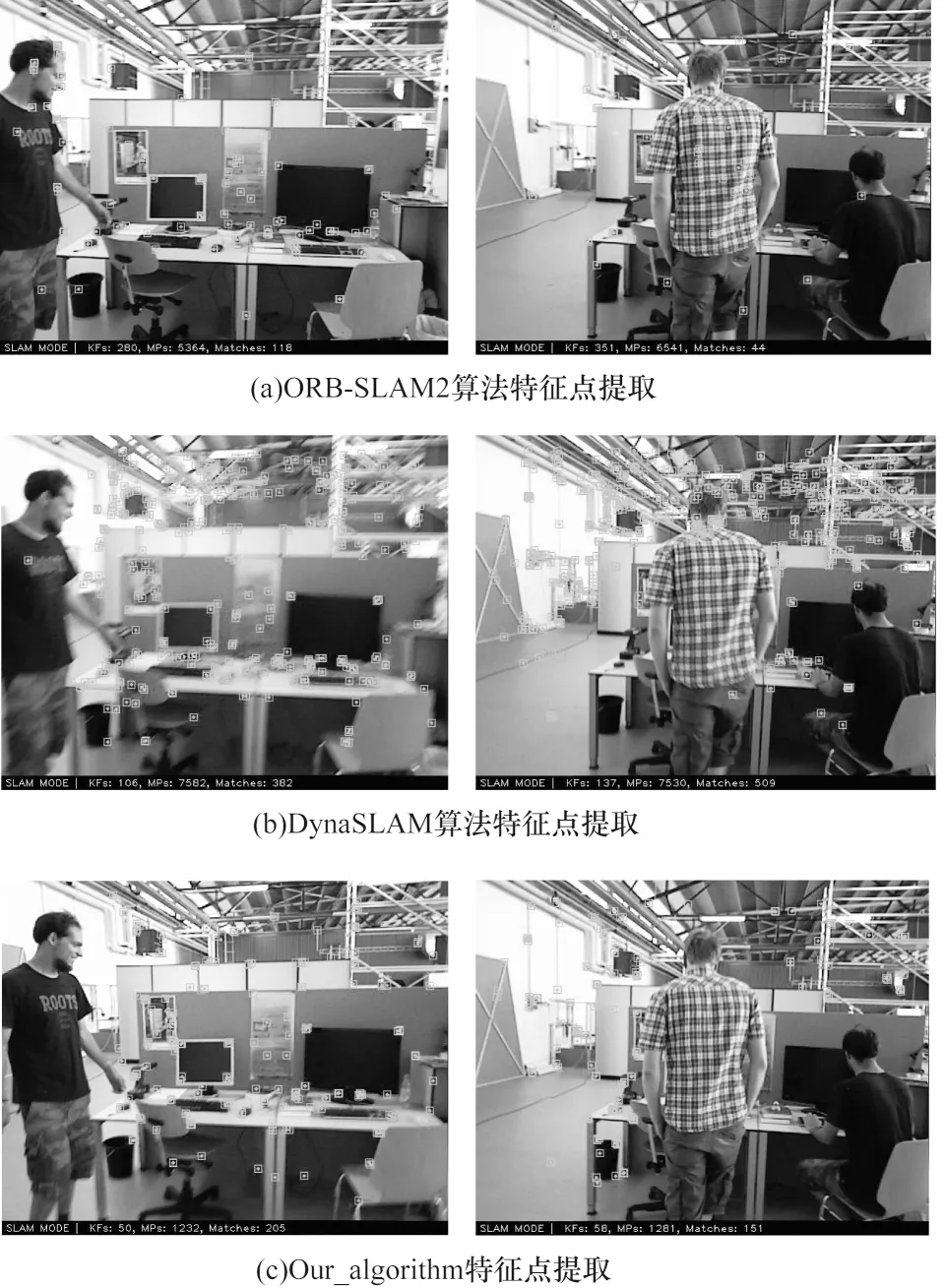
圖7 算法特征點(diǎn)提取對(duì)比Fig.7 Comparison of algorithm feature point extraction
通過(guò)圖7 對(duì)比可知,ΟRB-SLAM2 算法雖然運(yùn)行速度達(dá)到實(shí)時(shí)性的需求,但是算法并未針對(duì)動(dòng)態(tài)物體進(jìn)行處理,算法中一部分特征點(diǎn)提取到動(dòng)態(tài)物體上,導(dǎo)致算法精度降低。DynaSLAM 雖然針對(duì)運(yùn)動(dòng)物體進(jìn)行處理,但是由于計(jì)算資源有限,在部分低動(dòng)態(tài)場(chǎng)景中也產(chǎn)生了特征點(diǎn)的錯(cuò)誤提取。本文算法利用兩階段運(yùn)動(dòng)物體檢測(cè),在計(jì)算能力較低的平臺(tái),在保證實(shí)時(shí)性的同時(shí)實(shí)現(xiàn)了運(yùn)動(dòng)物體的精準(zhǔn)剔除,提取結(jié)果均優(yōu)于ΟRB-SLAM2 以及DynaSLAM 算法。
4 結(jié)束語(yǔ)
本文面向室內(nèi)動(dòng)態(tài)環(huán)境,提出一種基于深度學(xué)習(xí)和多視圖幾何的視覺(jué)SLAM 算法。利用兩階段運(yùn)動(dòng)物體檢測(cè)確定實(shí)際產(chǎn)生運(yùn)動(dòng)的物體,基于語(yǔ)義數(shù)據(jù)關(guān)聯(lián)算法采用靜態(tài)特征點(diǎn)優(yōu)化相機(jī)位姿。針對(duì)跟蹤線程和局部建圖線程,提出一種關(guān)鍵幀選取策略,從而減少運(yùn)動(dòng)物體對(duì)算法精度的影響,提高算法穩(wěn)定性。實(shí)驗(yàn)結(jié)果表明,本文算法的絕對(duì)軌跡誤差相較于改進(jìn)之前的ΟRB-SLAM2,平均均方根誤差降低40%。在算法實(shí)時(shí)性方面,與DynaSLAM 相比算法實(shí)時(shí)性提高10 倍以上。因此,本文算法能夠在室內(nèi)動(dòng)態(tài)環(huán)境下穩(wěn)定運(yùn)行,實(shí)現(xiàn)準(zhǔn)確的位姿估計(jì)。由于在動(dòng)態(tài)環(huán)境中運(yùn)動(dòng)物體的速度、位姿等信息能夠有效幫助自身系統(tǒng)完成定位,因此下一步研究如何將動(dòng)態(tài)物體運(yùn)動(dòng)位姿估計(jì)和靜態(tài)場(chǎng)景集成到一個(gè)視覺(jué)SLAM 中,提高視覺(jué)SLAM 在復(fù)雜動(dòng)態(tài)環(huán)境中相機(jī)位姿估計(jì)的準(zhǔn)確性和魯棒性。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48