多機互聯電纜敷設機協同控制方法及裝置研究
2022-05-14 03:27:04胡偉潘彩虹何青關山辛業春
機械工程師 2022年5期
胡偉,潘彩虹,何青,關山,辛業春
(1.杭州凱達電力建設有限公司,杭州 311100; 2.東北電力大學a.機械工程學院; b.電氣工程學院,吉林 吉林 132012)
0 引言
隨著電纜直徑和敷設距離的不斷增加,我國大多采用卷揚機帶動鋼絲繩牽引的方式敷設電纜[1-2]。但是,當電纜彎曲直徑過大時,經常會出現電纜絞擰和鎧裝壓扁等問題,導致電纜帶傷運行甚至報廢,無法滿足正常電纜敷設工作[3]。相較于牽引敷設,串聯助力敷設采用多臺電纜敷設機代替單個牽引機,改變了牽引力為主的傳統敷設方式,減少了敷設過程中電纜局部受力過大和過度磨損等問題,極大程度上保障了敷設質量,在大直徑電纜長距離敷設中受到人們的廣泛關注[4-5]。但是串聯助力敷設也存在一些問題,例如:由于復雜敷設路徑中各臺敷設機的推送長度不同,預設夾緊力可能不足以產生所需的推送力而造成各臺敷設機的推送速度不一致,這可能增加反向拉力,起反作用,也可能擠壓電纜,增大與管壁的磨損,降低電纜的安裝質量。此外,當夾緊力不足時,工程實踐中還可能出現電纜打滑現象,影響電纜敷設工作的正常進行。因此,如何根據電纜敷設機實時工作狀態實現多機協同控制是電力系統工作中存在的重點和難點[6]。
基于多機互聯敷設模式,提出了一種多機互聯電纜敷設機協同控制方法,研發了協調控制裝置,降低了人力投入,提升了智能化水平,極大地提高了敷設效率和安裝質量。
1 敷設系統及控制功能分析
1.1 多機互聯電纜敷設系統
多機互聯電纜敷設系統如圖1所示。系統分為現場層和管控層。現場層為布置于敷設路徑上的電纜敷設機集合,多臺電纜敷設機以助力的方式依次加入電纜敷設過程,實時監測夾緊力、敷設速度和敷設長度等信息,并通過通信模塊與管控層進行信息交互,實現對電纜敷設工作的遠程監控。管控層以協調控制裝置為核心,采用統一控制和個別控制相結合的控制理念,通過監測信息分析、控制指令生成、控制指令下達等步驟保障多機協同,完成電纜敷設工作。
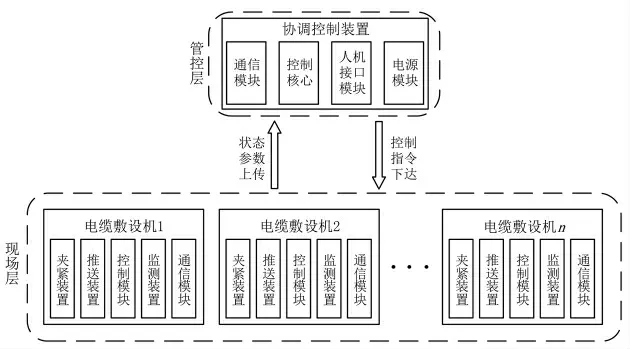
圖1 系統總體結構框圖
1.2 多機互聯電纜敷設監測原理
多機互聯電纜敷設系統的監控對象包括電纜推送速度、夾緊力、電纜頭壓力和敷設管況。電纜敷設機監測裝置布置如圖2所示。光電編碼器摩擦輪和導入輪組相配合,當電纜到達或經過敷設機工作位置會驅動導入輪組和光電編碼器摩擦輪同步轉動,實現對推送電纜速度的監測。輪輻式壓力傳感器布置于夾緊裝置和機架交匯處,實現對電纜夾緊力的測量。敷設電纜監測裝置如圖3所示。敷設電纜監測裝置安裝于敷設電纜頭部,螺桿式壓力傳感器實現對電纜頭壓力的監測,攝像頭并輔以LED燈板實時監測敷設管況。
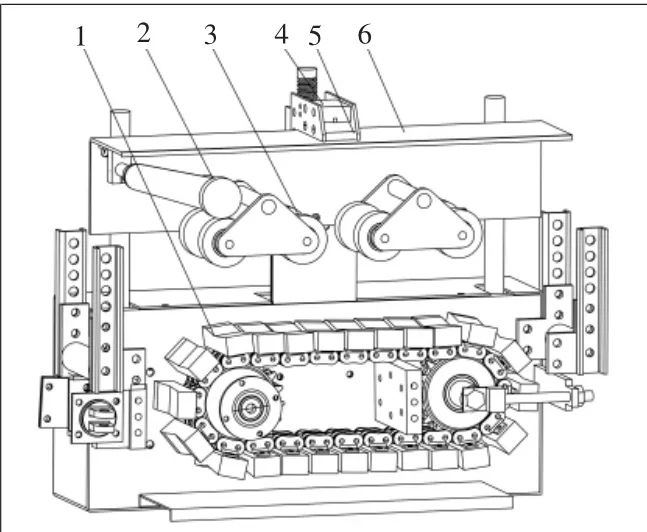
圖2 電纜敷設機監測裝置布置
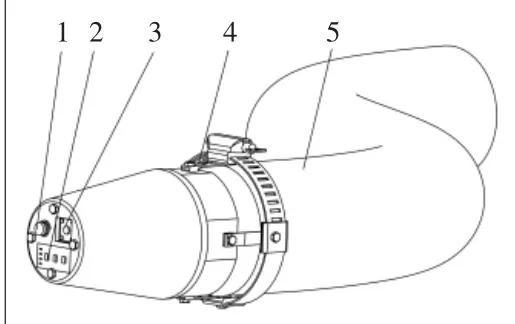
圖3 敷設電纜監測裝置
1.3 協調控制功能
通過分析敷設系統的總體結構和監測原理,歸納協調控制裝置的具體功能。協調控制裝置主要功能如下:1)遠程集中控制所有敷設機以統一的工作參數(敷設工作的啟停和敷設速度等)進行敷設電纜工作,并依據敷設機運行狀態進行實時調整以保證多機協同工作;2)根據單臺敷設機工作狀態決定何時啟動敷設機,以及判定是否存在因預設夾緊力不足而造成推送過程中的電纜打滑現象,并對上述內容進行智能化控制以保證正常的敷設工作。
2 協調控制策略
協同控制策略包括多機控制和單機控制。多機控制負責管理電纜敷設的全局工作參數,單機控制負責調節單臺電纜敷設機的運行狀態。多機控制和單機控制相結合,實現多機協同控制,保障電纜敷設工作正常進行。
2.1 多機控制
多機控制方法流程如圖4所示,首先設定全局工作參數(如電纜型號、直徑和敷設速度等),并將參數下達至各電纜敷設機,開始敷設電纜;然后協調控制裝置對全局電纜敷設工作進行監控,并實時判斷敷設系統是否協調工作,如果是,則保持正常工作,如果否,則依據控制指令和運行狀態對各臺電纜敷設機的工作參數進行調節(即單機控制),保證多機協同工作。同時,協調控制裝置還根據敷設管況和電纜頭壓力判斷敷設管道是否堵塞,當管道堵塞時緊急停止工作,等工作人員疏通后重新敷設電纜。此外,如果工作進度不符合要求,還可調節敷設速度等全局參數,保證敷設工作按期完成。
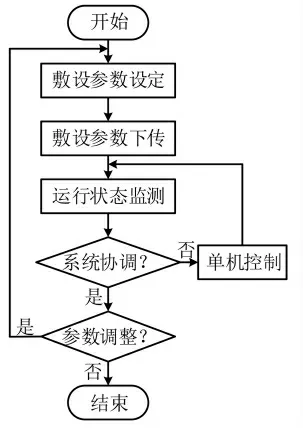
圖4 多機控制方法流程
2.2 單機控制
單機控制主要依據監測數據判定各臺敷設機的實時狀態,并據此調整敷設機的相應參數,保證多機協同工作。首先單臺敷設機接受工作人員設定的全局工作參數,啟動監測裝置對敷設機進行監測,準備開始電纜敷設工作。當監測到光電編碼器計數時,可判定電纜已到達該敷設機工作位置,敷設機根據全局工作參數按照預設的夾緊力對電纜進行夾緊,開始電纜推送工作。在電纜推送過程中,當光電編碼器所監測的速度和設定的敷設速度不一致時,可判定出現電纜打滑現象,電纜敷設機以步進的方式逐步增加夾緊力,保證電纜敷設工作正常進行。單機控制方法流程如圖5所示。
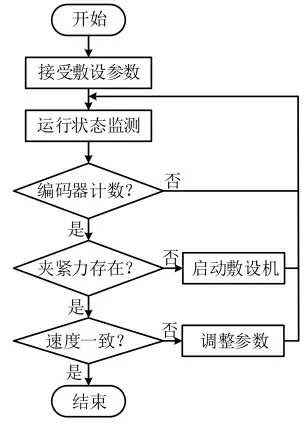
圖5 單機控制方法流程
3 協調控制裝置
協調控制裝置結構如圖6所示。該裝置包括控制核心、人機接口模塊、通信模塊和電源模塊。控制核心負責協調其余各模塊,實現對電纜敷設工作的遠程集中控制,并根據上述內置協調控制策略對多個工作參數進行實時調節,保證多機協同控制。通信模塊負責接受來自敷設機的運行信息,并向敷設機下達控制核心制定的調整指令,實現協調控制裝置與敷設機的信息交互。人機接口模塊提供電纜型號、直徑、敷設速度等工作參數的設定界面,并具有敷設機運行狀態的實時顯示功能,為電纜敷設人員提供便利,提升了人機交互性能。電源模塊具備超寬電壓輸入功能,保證在復雜工況中為各模塊提供穩定電源輸入。
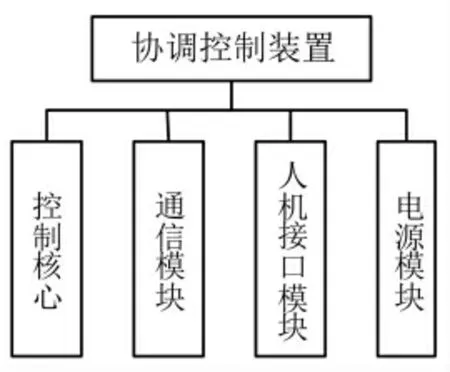
圖6 協調控制裝置結構
控制核心主要包括以STM32F103C8T6 芯片為主控芯片的核心電路。STM32F103C8T6主控芯片以32位ARM Cortex-M為內核,采用LQFP48封裝,頻率為72 MHz,程序存儲器容量為64 kB,具有3個USART接口,分別用于與無線通信模塊和人機接口模塊的通信。STM32F103C8T6芯片外圍電路如圖7所示。
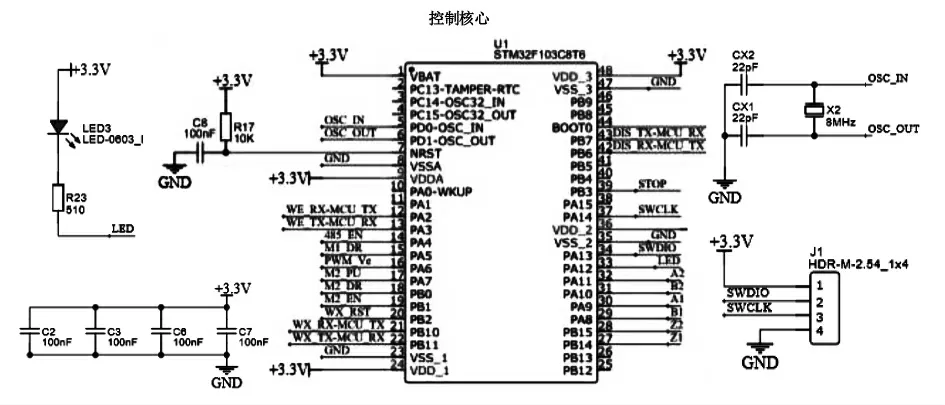
圖7 STM32F103C8T6芯片外圍電路
無線通信模塊采用E22-400T22D無線模塊,其采用SX1268射頻芯片,具有抗干擾能力強和傳輸距離遠(最遠距離為5 km)等優點,保障通信的穩定性。此外,該模塊還具有體積小、傳輸速度快(最高速度:62.5 kBps)、功耗低等優點,增強了系統的實時性。無線通信模塊電路如圖8所示。
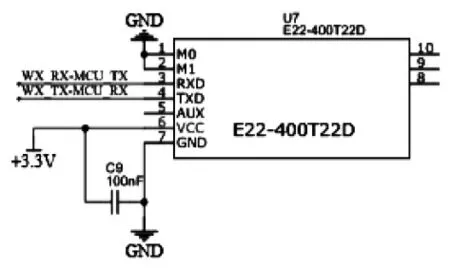
圖8 無線通信模塊電路
人機接口模塊主要包括串口屏和收發器兩部分。串口屏采用HYW070型號顯示屏,分辨率為1026 ×600,并且還具有多種組態控件(數據錄入、曲線顯示和增量調節等)。收發 器 選 用SP3232EEY -L/TR模塊,增強傳輸信號的強度,實現惡劣環境下的可靠通信。人機接口模塊電路如圖9 所示。人機接口界面如圖10所示。
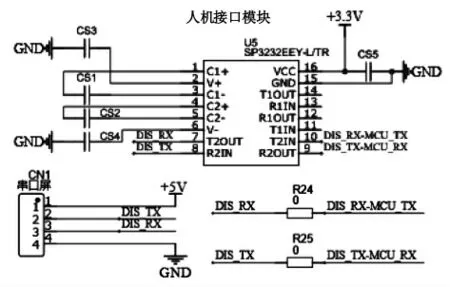
圖9 人機接口模塊電路

圖10 人機接口界面
電源模塊選用URB4805 YMD-10WR3模塊電源,具有超寬電壓輸入范圍,隔離電壓高達DC 1500 V ,具有輸入過壓、短路和過流保護功能,目前廣泛應用于電力、工控和通信等領域。電源模塊電路如圖11所示。
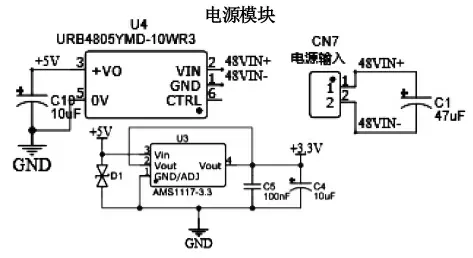
圖11 電源模塊電路
協調控制裝置工作流程如圖12所示,首先利用無線通信模塊建立協調控制裝置與敷設機的通信,檢查敷設機上線臺數,確認無誤后,準備開始電纜敷設工作;然后控制核心根據內置的控制策略(即單機控制和多機控制)協調其余各模塊對敷設機進行調整,保證敷設機協同工作。其中,多機控制所需設定參數(如電纜型號、直徑、敷設速度等)通過人機接口模塊進行設置,方便工作人員操作。
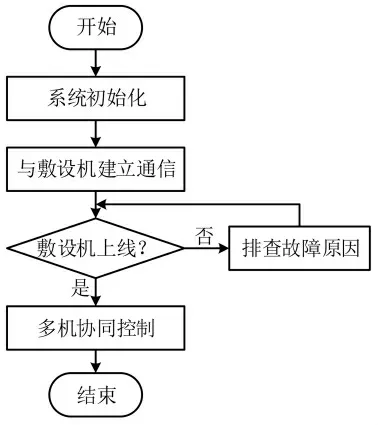
圖12 協調控制裝置工作流程
4 結語
1)基于多機互聯敷設模式,提出了一種多機互聯電纜敷設機協同控制方法,多機控制管理電纜敷設的工作進度和全局參數,而單機控制則根據全局參數和運行狀態對敷設機參數進行實時微調,單機控制和多機控制相結合,保障多機協同工作,降低了人力投入,極大地提升了人性化程度。
2)開發了協調控制裝置,利用無線通信模塊與敷設機建立通信,實現對多臺敷設機的遠程集中管理,并根據內置協調控制策略對多工作參數進行實時調節,提高了電纜敷設的自動化和智能化水平,保障了敷設效率和安裝質量。