基于航向角輔助的IMM-CKF雷達/紅外跟蹤算法
2022-05-13 05:03:08李世中
探測與控制學報 2022年2期
彭 滔,張 亞,李世中
(中北大學機電工程學院,山西 太原 030051)
0 引言
隨著現代戰爭的高速發展,地面探測器與高速機動目標的較量日漸呈現出白熱化狀態。高機動目標的特點決定了僅靠單一種類的探測器難以快速且連續地探測、跟蹤目標,需要綜合應用多裝備協同實現對目標有效地探測、跟蹤[1]。雷達作為傳統有源傳感器,可以提供完整的目標位置信息,故在目標檢測及跟蹤方面發揮著不可磨滅的作用。但由于雷達在工作中需要向空中輻射高功率電磁波,易受到電子和反輻射導彈的襲擊[2-3]。紅外傳感器作為被動傳感器通過接收目標輻射的熱能來檢測和定位目標,同時具有較強的抗干擾能力,但作用距離短是紅外傳感器的短板[4]。將雷達和紅外傳感器的量測數據通過數據融合技術結合在一起形成雷達和紅外多傳感器探測系統,可有效地彌補各自缺點,從而給出目標位置的精準估計。
文獻[5]中首次將序貫濾波的方法加入到雷達紅外復合制導系統中,在此基礎上加入交互式多模型來跟蹤復雜的機動目標,但沒有解決序貫濾波本身的誤差累計的問題。文獻[6]中將分布式加權融合算法與交互式多模型無味卡爾曼濾波(IMM-UKF)算法結合,該方法提高了系統抗干擾能力和對目標跟蹤的有效性,但該算法只適用于低維非線性系統且實時性不足。文獻[7]提出了一種雷達輔助的紅外傳感器融合系統,該系統利用雷達工作時獲得的目標狀態信息作為輔助信息傳遞給紅外傳感器,從而提高跟蹤性能。文獻[8]提出了基于IMM-CKF的純角度測量的機動目標跟蹤算法,該算法利用角度測量來跟蹤機動目標,其跟蹤性能明顯優于IMM-UKF濾波算法,對非線性系統機動目標跟蹤,該算法不僅提高了目標跟蹤濾波精度,而且增強了系統穩定性。文獻[9]中目標的航向信息能直接反映目標飛行朝向,故研究對航向信息的解算,以及利用航向信息作為輔助信息進行目標跟蹤具有十分重要的工程意義。針對傳統雷達傳感器的非線性機動目標跟蹤中,采樣信息差異和目標機動強等原因造成的跟蹤性能低等問題,本文提出基于航向角輔助的IMM-CKF雷達/紅外跟蹤算法。
1 雷達紅外復合系統與容積卡爾曼濾波
1.1 雷達紅外量測模型
假定雷達與紅外傳感器系統同地配置,已經過坐標轉換,其目標的離散信號模型可以表示為:
X(k+1)=F(k)X(k)+G(k)u(k)+V(k),
(1)

因為雷達可以測量出機動目標的三個參數,分別為:距離、方位角和俯仰角,因此設rR(k)、θR(k),φR(k)分別為目標距離、方位角以及俯仰角,測量噪聲為νrR(k)、νθ R(k)、νφ R(k),其測量方程為:
(2)
令θI(k)和φI(k)分別為紅外傳感器測量目標的方位角和俯仰角,νθI(k),νφI(k)為測量噪聲,其測量方程為:
(3)
因在航向角的計算中是在X-Y的二維平面中求解,式(2)、式(3)中的俯仰角參數對后續的參數計算無影響,故后續求解不予以考慮。
1.2 容積卡爾曼濾波
容積卡爾曼濾波(CKF)基于三階球面徑向容積準則,并使用一組容積點來逼近具有附加高斯噪聲的非線性系統的狀態均值和協方差。本章節總結了CKF濾波算法,該算法在每個時間步長中計算時間更新和量測更新步驟。
CKF濾波算法具體步驟如下:
1) 初始化
(4)
2) 時間更新
①計算容積點:

(5)
(6)
式(6)中,i=1,2,…,2n,且ξi為第i個容積點。
(7)
式(7)中,n為狀態變量的維度,[1]為單位矩陣。
②傳播容積點:
(8)
③計算狀態量預測值及誤差協方差預測值:
(9)

(10)
3) 量測更新
①計算容積點:
(11)
(12)
②傳播容積點:
(13)
③計算測量預測值:
(14)
④測量誤差協方差和互協方差:

(15)

(16)
⑤更新增益、狀態量、誤差協方差:
(17)
(18)
Pk+1|k+1=Pk+1|k-Wk+1Pzz,k+1|k(Wk+1)T。
(19)
2 二維航向角與IMM-CKF濾波算法
2.1 二維航向角的定義與求解
在三維空間中,航向角是機動目標的速度向量在水平面上的投影,是其投影與某一基準方向的夾角。在本文中采用直角坐標系中將機動目標的速度向量與y軸的正方向作為航向角的基準方向,且記順時針方向為正。
在實際跟蹤過程中,由于測量噪聲的影響,使得測量航向角與目標航向角之間必然存在偏差。而由于測量噪聲引起的偏差可以通過濾波方法或提高探測精度進行削弱。所以,本文利用量測航向角信息來對目標航向角信息進行修正,從而提高系統的估計精度。
(20)


(21)

(22)
在濾波的過程中,通過k時刻的濾波值得到k+1時刻的預測值,并將其轉換成測量預測值,根據復合測量值與預測值計算復合新息,利用容積卡爾曼濾波(CKF)算法得到k+1時刻的濾波值,并由此來更新航向角。
2.2 基于IMM-CKF的融合算法
基于IMM-CKF的雷達/紅外算法的核心思想是把在交互式多模型中的雷達和紅外部分分別利用容積卡爾曼濾波(CKF)對量測信息進行濾波[10-12]。算法框圖如圖2所示。

圖2 IMM-CKF算法框圖Fig.2 IMM-CKF structure
算法具體內容包括以下步驟:
1) 計算混合概率

(23)

(24)
2) 計算交互/混合狀態估計和協方差
(25)

(i,j=1,2,…,r),
(26)
3) 模型濾波
4) 模型概率更新
r個模型濾波器的似然函數可能為:
(27)
此時,模型Mj的概率更新為:
(28)
(29)
式(28)、式(29)中,c為歸一化常數。
5) 計算狀態估計及其協方差
根據混合方程計算輸出狀態估計和協方差為:
(30)

(31)
3 仿真實驗
3.1 目標模型集
為了驗證基于航向角輔助的IMM-CKF跟蹤算法的可行性,本文假定目標運動由三個模型(r=3)組成。
M1:勻速模型(CV)
CV模型用于目標處于非機動時段。目標狀態為:
(32)
離散狀態轉移矩陣為:
(33)
M2:協調轉彎模型(CT)
在這一模型中,用一個角速度ω來增加狀態向量,假定角速度ω恒定不變,目標狀態可以表示為:
(34)
離散狀態轉移矩陣為:

(35)
M3: 對ω<0時,M2模型描述一個順時針轉彎運動,此模型為一逆時針轉彎運動,即為ω>0。
3.2 仿真參數設定



目標1的初始狀態為[8 000 m,200 m/s,5 m/s2;5 000 m,400 m/s,1 m/s2;9 000 m,250 m/s,10 m/s2],目標2的初始狀態為[1 000 m,120 m/s,0.5 m/s2;6 000 m,-300 m/s,0.5 m/s2;5 000 m,-100 m/s,15 m/s2]。
3.3 仿真結果分析
圖3所示為計算機仿真建立的目標1、目標2的運動軌跡和雷達-紅外融合跟蹤濾波軌跡的對比圖。從圖中可以看出在整個觀測時間內,本文提出的算法能很準確地確定目標的運動軌跡。圖4、圖5分別為目標1、目標2同時在基于航向角輔助下的兩個坐標方向上使用雷達單傳感器與融合跟蹤濾波在位置上RMSE值的對比結果。從圖4與圖5中可以看出雷達和紅外傳感器融合后對目標跟蹤的RMSE值明顯低于雷達單傳感器,且整個RMSE值表現平穩,沒有大幅度的變化,表明本文提出的基于航向角輔助的IMM-CKF濾波算法對機動目標的跟蹤有效且適用。同時由圖6可以看出采用融合系統能夠綜合各單傳感器的優勢,復合探測系統對提高航向角的估計精度有著積極作用,實現量測信息互補,精確估計目標狀態。
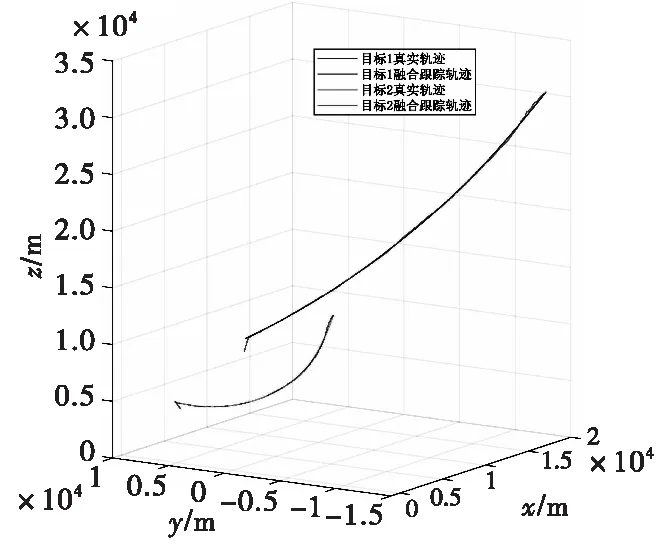
圖3 目標機動軌跡Fig.3 Target maneuvering trajectory
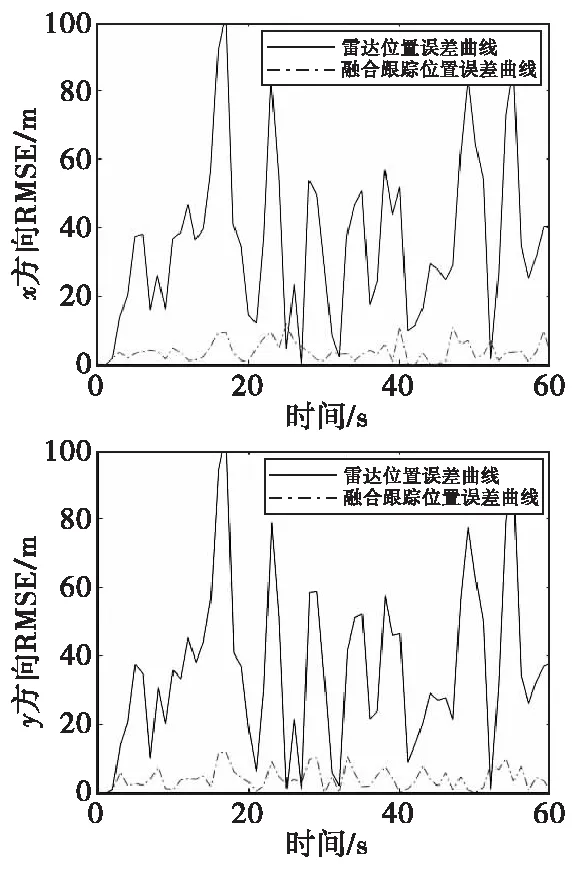
圖4 目標1在x方向和y方向的位置誤差Fig.4 Objective 1 x-direction and y-direction position error

圖5 目標2在x方向和y方向的位置誤差Fig.5 Objective 2 x-direction and y-direction position error
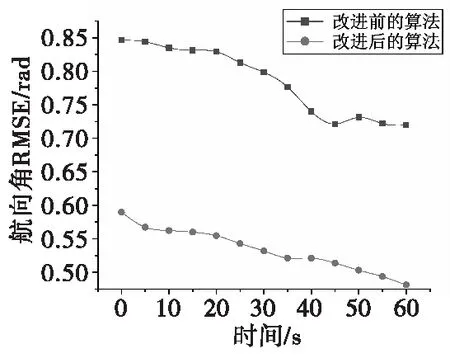
圖6 航向角的RMSE值Fig.6 RMSE values for course angle
4 結論
本文提出基于航向角輔助的IMM-CKF雷達/紅外目標跟蹤算法。該算法充分利用多傳感器的互補效應,利用紅外傳感器的量測信息作為首層輔助信息來修正雷達的量測信息,用該信息對目標速度的方向進行更新,從而達到提高目標跟蹤精度的目的。同時提出將航向角信息引入到IMM-CKF濾波中來,利用航向角信息作為第二層輔助信息來與雷達和紅外傳感器的復合測量信息求出目標的測量航向角,隨之將更新的航向角信息與雷達和紅外傳感器的量測信息組合,共同組成全新的復合量測向量,同時目標預測狀態向量也增加航向角分向量,該航向角即為目標速度向量的方向,最后利用IMM-CKF濾波算法進行濾波。仿真實驗結果表明,基于航向角信息輔助的IMM-CKF雷達/紅外目標跟蹤算法能夠顯著提高對目標的跟蹤精度,同時利用復合探測也有效提高對航向角的估計精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
