全回轉推進器基座建造與設備安裝
2022-05-13 10:53:48王少華羅志益尹寶福伍常斌李江波
廣東造船 2022年2期
王少華 羅志益 尹寶福 伍常斌 李江波
摘? ? 要:我司設計建造的鉆采船設置有全回轉推進器,推進器及其基座沿船長和船寬方向設有安裝角度。在基座設計建造過程中,采用CAD三維模型輔助SPD建模;安裝時借助全站儀采用投影法和拉鋼絲的方式進行定位;設備吊裝時嚴格按照工藝要求施工,合理使用葫蘆等工具進行安裝定位,確保基座和設備的安裝滿足要求。
關鍵詞:全回轉推進器;雙斜平面;三維建模;投影法
中圖分類號:U ?? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A
Foundation Design and Installation Procedure of Azimuth Thruster
WANG Shaohua, LUO Zhiyi, YIN Baofu, WU Changbin, LI Jiangbo
( CSSC Huangpu Wenchong Shipbuilding Company Limited,? Guangzhou 511462 )
Abstract: Azimuth thruster is installed on drillship which is designed and built in our shipyard, azimuth thruster and its foundation has a degree along longitudinal and transverse directions of veseel. During the foundation design, CAD is used to assist SPD software to build the foundation model; during the foundation installation, projection method and pulling steel wire are used for positioning. During lifting and installation of the thruster, technical requirements are followed strictly, and some auxiliary lifting tools are reasonably used for positioning of azimuth thruster accurately to ensure that the installation of the foundation and thruster meet the requirements.
Key words: Azimuth thruster; Double slanting plane; 3D modeling; Projection method
1? ? ?前言
我司建造的海洋石油708、832PSV、8 000HP海工輔助船以及當前的鉆采船,均使用了全回轉推進器。全回轉推進器具有空間占據少以及操縱性好的優點,被多型海工輔助船廣泛使用。
全回轉推進器設備及其基座的安裝與XZ面和YZ面成一定角度,設備基座形成雙斜切的柱面或平面,安裝精度要求高。我司通過多艘海工輔助船的設計與建造,已形成了一套較為成熟的方法體系。
2? ? ?基座建模
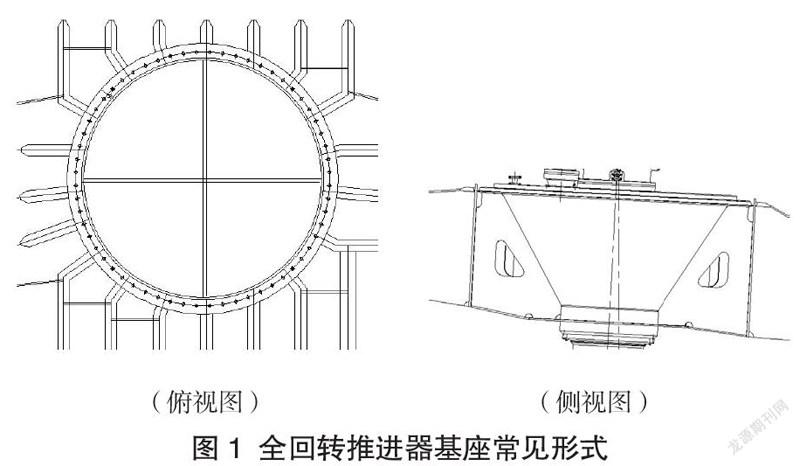
全回轉推進器基座包括:基座面板和基座圍井,以及其周邊的T型材肘板和圍井內部的加強筋等。常見的基座形式,如圖1所示。
2.1? ?CAD三維建模
根據推進器安裝圖和基座結構圖,首先采用CAD三維建模方式將基座、圍井以及周圍的附屬結構進行建模,確定圍井軸線、基座平面以及附屬結構的坐標面。
2.2? ?坐標點提取
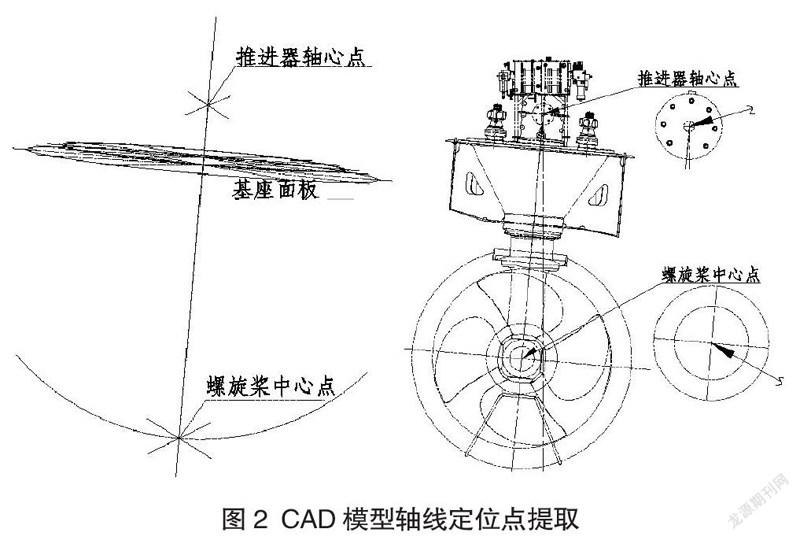
在已完成的CAD三維圖中提取SPD建模需求的坐標點,包括圍井軸線的上下兩點(即主推電機軸心點和螺旋槳中心點)、基座平面定位點和附屬結構所在平面定位點。
(1)基座圍井軸線定位點
一般取推進器電機軸心點和螺旋槳中心點,此兩點將確定圓柱型圍井的軸線(見圖2)。在施工現場在進行筒體軸線定位時,CAD模型可精確提供軸線定位點和檢驗點坐標,方便且精確。
(2)基座平面定位點
基座平面與圍井軸線垂直,在面板上取任意三點作為基座面板的平面定位坐標。在現場施工時,CAD模型可提供基座平面定位點和檢驗點坐標,方便且精確;
(3)附屬結構平面定位點
基座筒體周圍的發散結構所在平面經過圓柱筒體軸線,因周圍發散結構較多且全部為斜平面,使用CAD模型進行坐標點提取將大大減少SPD建模難度,且精確度大大提高。
2.3? ?SPD建模
根據CAD三維圖形中提取的坐標點,在SPD中建立筒體、基座面板和周圍發散結構等模型。
采用CAD三維模型輔助SPD建模,可方便且精確的提供建模輔助點和輔助邊界,大大減小了直接使用SPD建模的難度;同時免除了手工放樣,提高了生產設計精度,縮減了生產設計周期,也對生產現場基座和設備的精確安裝起到指導作用。
3? ? ?基座建造與安裝
基座一般以部件形式整體制作,即基座面板和基座圍井結構焊接為整體部件。基座面板的平面度和筒體的圓周度經過精度報驗合格后,應在基座面板前、后、左、右位置打好樣沖點,輔助基座在船體中的定位安裝;推進器基座的定位和安裝在同一分段或同一總段內進行或大合攏完成之后進行,并使用全站儀進行輔助定位。
3.1? ?確定基座圍井軸線
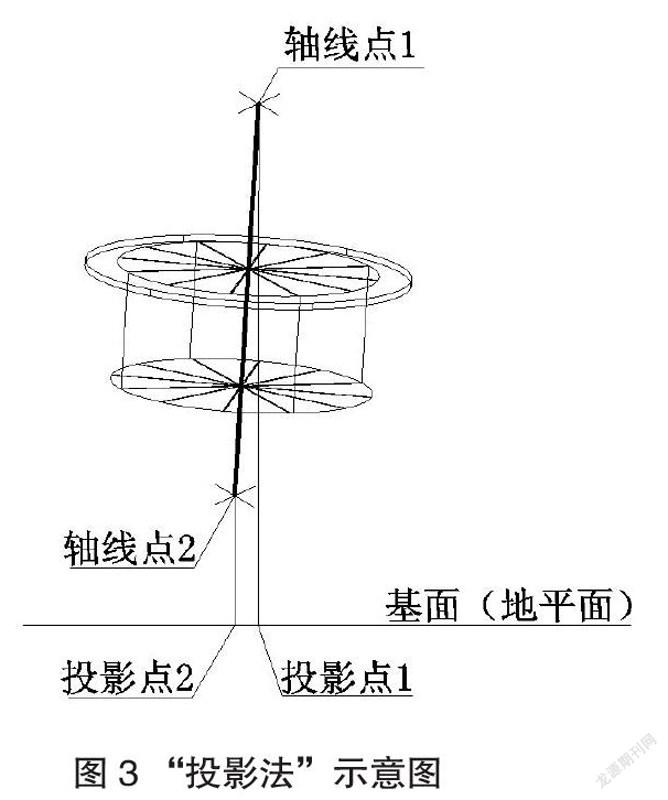
采用投影法確定軸線:首先確定船體的基準線或基準面,然后從相應的基準線或基準面的測量點劃出軸線的測量點。
(1)通過理論計算,給定軸線上的兩個軸線點1(X1,Y1,Z1)和2(X2,Y2,Z2),則基面(地平面)的投影點坐標分別為投影點1(X1,Y1,0)和2(X2,Y2,0)。為方便操作,以地面上的投影點為基準,使用全站儀確定空間軸線點1和2,如圖3所示。
(2)基座結構在船體分段中測量定位后,在船體結構中設置一鋼絲繩,鋼絲繩過軸線點1和2,并使鋼絲繩在船體分段中固定、拉直。
3.2? ? 基座安裝定位
(1)通過理論計算,確定軸線點1距離基座面板中心點3的長度L。在鋼絲繩上以軸線點1為基點量取長度L,在鋼絲繩上標記中心點3,如圖4所示:
(2)使用全站儀確定與軸線垂直的法平面,且使此法平面經過標記在鋼絲繩上的基座平面中心點3;調整推進器基座,使推進器基座平面與法平面重合。如圖5所示。
(3)在推進器基座平面與全站儀確定的法平面重合的情況下,微調基座,使鋼絲繩上標記的點3(基座平面中心點)與基座圍井的內表面前、后、左、右的垂直距離相同;
(4)完成上述步驟后,基座定位完成。此時需點焊固定基座,防止其移位。
3.3? ? 基座安裝檢驗
(1)焊前檢驗項目:焊接節點形式、坡口角度、裝配間隙等;
(2)精度要求:基座面板水平度和傾斜度允許偏差≤1 mm/m、整體偏差≤3 mm;
(3)滿足裝配和精度要求后,方能進行基座的焊接。
3.4? ? 基座的焊接
(1)為減少因焊接變形引起的安裝偏差,基座與船體結構的焊接以及周圍附屬結構的焊接,應采取對稱焊接的方式;
(2)基座焊接后,對基座的平面度和傾斜度進行二次復核,且通過超聲波無損檢測(UT)+磁粉無損檢測(MT)對焊縫進行無損探傷,探傷檢驗合格后方能進行下一步的施工;
(3)當基座面板的頂面有機加工要求時,則基座的面板板厚一般應留5 mm的加工余量;
(4)基座焊接并測量合格后,方能進行面板機加工,以消除焊接變形對基座精度的影響。
4? ? ?推進器設備安裝
推進器與基座面板連接方式,一般分為三種,如圖6所示。
根據不同的連接方式,選擇不同的吊裝和安裝方法:
(1)對接形式和角接形式,采用由下至上的吊裝和安裝方法;
(2)搭接形式,采用由上至下的吊裝和安裝方法。采取這種安裝方法時,主甲板需提前開設設備進艙工藝孔,設備則分成法蘭面和槳葉兩部分分別安裝。
本文主要介紹由下至上吊裝安裝方法:
(1)調整推進器的擺放形態,利用托架工裝使其處于直立狀態;吊裝前,確定主推前、后、左、右方向的安裝基準點,并在法蘭面上打好樣沖點;吊裝時,利用設備上吊點、上法蘭和法蘭下加強筋作為受力點;固定舵槳,同時注意保護舵槳上下軸封位置,以防損壞密封;
(2)當推進器在分段或總段安裝時,需布置支墩,并應在高度方向給推進器安裝預留足夠的空間;將主推進器坐落在特制的工裝架上,并用小車將其拖曳至將要安裝推進器的總段或分段下靠近外板開孔位置;然后使用船體外板設置的永久吊碼和手拉葫蘆吊裝推進裝置,在主推提升過程中需不斷通過調節葫蘆調整主推角度,使推進裝置整體保持與筒體平行,確保推進器順利進艙安裝到位,如圖7所示。
(3)推進器進艙落位后,調整舵槳法蘭面使其上的樣沖點與基座的樣沖點對位,調整舵槳法蘭與基座圍井之間的間隙,使前后左右間隙保證均勻,并滿足主推進器安裝原則工藝的間隙的相關要求和標準;
(4)舵槳安裝位置調整測量合格后,在筒體內壁和筋板之間插入楔形塊并固定,并使用卡馬固定推進器法蘭面和基座面板.卡馬需焊接牢靠并保證數量,以確保推進器在焊接過程中不因焊接收縮導致推進器的位置發生變化;
(5)精度報驗合格后方可進行施焊。為減少焊接變形對安裝精度的影響,采取對稱焊接方式,推薦使用雙人對稱施焊。對稱施焊可大大減少焊接收縮所產生的推進器定位偏移問題。
5? ? ?結束語
我廠在海工輔助船等船舶的全回轉推進器及其基座設計建造中,基座采用CAD三維模型輔助SPD設計軟件進行設計,減小了生產設計的難度,大大提高了生產設計的精度,為現場定位安裝提供了數據技術支持。同時借助全站儀,使用投影法進行定位和安裝,使施工更簡便、周期更短、精度更高。為類似船型全回轉推進器的設計建造提供借鑒。
參考文獻
[1] 趙紅,孫培廷. 吊艙式船舶電力推進裝置的發展狀況[J]. 航海技術,2003年,01期:1-6.
[2] 陳可越. 船舶設計實用手冊-總體分冊[M]. .中國交通科技出版社.2007年:71-80.
