一種踝關節柔性助力外骨骼系統設計*
2022-05-12 09:40:38鄭立京陳靈星
機電工程技術 2022年4期
鄭立京,王 卓,陳靈星
(1.廣東省機械研究所有限公司,廣州 510705;2.中國科學院深圳先進技術研究院,廣東深圳 518055)
0 引言
柔性外骨骼在行軍助力、康復助老、智能助殘等方面具有非常廣闊的應用前景[1-3]。近幾年以柔性傳動為技術核心的穿戴式機器人高水平研究多次發表于Science、Science Robotics等頂級期刊,是國際研究的前沿與熱點[4-6]。國外在柔性外骨骼方面的代表性研究主要包括:哈佛大學Wyss實驗室的Walsh團隊設計了繩驅髖踝雙關節助力系統[7]、踝關節助力系統[8]、膝關節助力系統[9]和髖關節助力系統[10];卡內基梅隆生物力學實驗室的Collins團隊設計了踝關節被動與主動助力系統[11-12]和多關節助力系統[13];北亞利桑那大學生物力學實驗室Lerner[14]針對中風患者設計的外骨骼系統輔助踝關節的跖曲;瑞士蘇黎世聯邦理工學院感知-運動系統實驗室的Riener團隊設計了MAXX(Mobility Assisting textile exoskeleton),其采用1個驅動器輔助髖、膝、踝3個關節[15]。近幾年國內柔性外骨骼的研究也取得了快速發展,代表性的成果有:中國科學院深圳先進技術研究院設計的全身助力外骨骼[16]、髖膝聯動外骨骼[17]、髖踝聯動外骨骼[18]和輕型助踝外骨骼[19]。
柔性外骨骼具有良好的人機交互性能,為了將力準確地傳遞到目標關節,傳感系統必須捕獲關鍵的步態事件進行反饋控制。Asbeck等[20]使用足部開關來檢測鞋跟撞擊,并將鞋跟中的陀螺儀與張力傳感器結合起來檢測鞋跟撞擊。Karavas等[21]在每條腿上安裝了3個慣性傳感器,分別獲得大腿、小腿和腳的矢狀面角位移和角速度,以此判斷位姿狀態。目前的交互方式都存在滯后性的問題,給人行走帶來了一定的干擾。
在人體行走時,下肢是多個關節協同作用的結構,根據相關研究踝關節做功最多、承載最大,因此本文設計了一款踝關節柔性助力外骨骼系統,主要由控制單元、執行單元、鮑登線、足底壓力傳感器、拉力傳感器等幾部分組成,并通過肌電信號進行效果評估驗證。
1 踝關節生物力學分析
本文選取4名參與者,進行了一系列正常行走實驗,探討柔性踝關節外骨骼設計與行走的關系,為外骨骼設計提供了理論依據。受試者按照自身習慣,進行正常步態行走。在數據收集之前,每位受試者都經歷了一個適應階段。并在距離起點2 m的地方放置兩塊測力板。運動學數據由三維運動光學捕獲系統Vicon記錄,地面反作用力使用兩塊AMTI測力板收集,每位參與者進行5次行走。將采集到的數據通過OpenSim人體骨骼肌肉仿真軟件進行分析,如圖1所示,通過逆向運動學、逆向動力學和肌肉力計算,得到踝關節角度、關節力矩、關節功率和肌肉激活數據,并進行統計學分析。
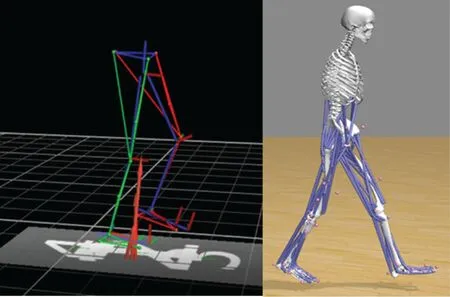
圖1 踝關節采集與步態分析
人體步態周期可分為站立和擺動階段,具體有7個階段:首次觸地期、支撐相中、末期,以及擺動相前、早、中、末期。通過生物力學軟件得到的踝關節生物信息曲線如圖2所示。以右腳為例,跟著地為步態的初始階段,踝關節首先進行背屈,關節力矩呈線性增加,關節做負功,隨后腳尖離地,關節力矩減小,踝關節顯著做正功,隨后右腳進入擺動項,左腳進入支撐相,以此進行循環。

圖2 踝關節生物力學數據
2 外骨骼系統設計
下肢外骨骼應用廣泛,不僅可以應用于醫療康復,也可以應用于運動增強。在本文中,踝關節柔性外骨骼的助力系統如圖3所示,其主要由控制單元、執行單元、鮑登線、足底壓力傳感器、拉力傳感器組成。控制單元以STM32為核心控制板,外加藍牙模塊、供電電源以及其余外設組成,用于控制整個外骨骼系統。執行單元由直流無刷電機(DJI 3508)和電流調速器(C620)組成,用于為踝關節提供助力。鮑登線是系統傳遞的途徑。足底壓力傳感器用于步態事件的劃分,以便更好地控制系統。拉力傳感器作為系統反饋,提高系統助力穩定性。

圖3 踝關節柔性外骨骼的助力系統
踝關節柔性外骨骼的助力系統整體質量僅2.56 kg,其中約90%的質量作用于腰部,其余質量集中于腳底,其質量分布如表1所示。
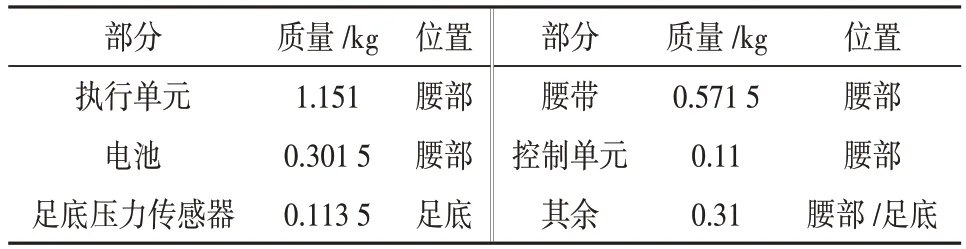
表1 踝關節柔性外骨骼系統質量分布
3 控制系統設計
不同的關節在行走過程中產生不同的生物關節力矩。本文設計的踝關節柔性助力外骨骼針對人在行走過程中的踝關節助力,因此,只需利用踝關節生物力矩來控制外骨骼。本節重點針對人在行走過程中踝關節生物力矩的變化,以此為踝關節助力外骨骼制定相應的控制策略,從而減少肌肉疲勞程度。
3.1 足底壓力傳感器分析步態
足底壓力傳感器是是一種壓敏傳感器,根據所受壓力大小的變化改變電平值,常用于步態分析的一種是鞋墊型足底壓力分布式測量傳感器如圖4所示,其由8個應變片組成,可以用于測量腳趾、腳掌以及腳根3個部分的運動狀態。當6、7、8號應變片高于閾值時,即這些應變片受壓程度較大,所以可以判定此時為腳跟觸底狀態。當6、7、8號應變片低于閾值且其余應變片均高于閾值,即6、7、8號不受壓,其余受壓,所以可以判定此時為腳跟離地狀態。由此看來,足底壓力是一種分析人體步態信息的重要工具,可以很好地分析人體步態事件變化。
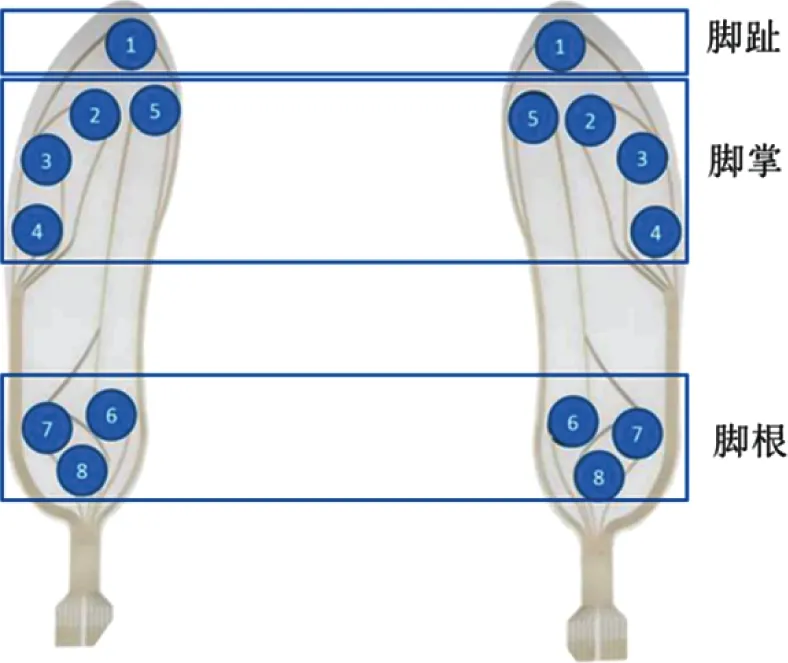
圖4 足底壓力鞋墊
3.2 輔助力設計
踝關節柔性外骨骼的控制策略主要是改變力的振幅和相位,如圖5所示,當人的步態到達腳跟離地狀態時踝關節需要開始做正功,所以這個時候通過踝關節助力外骨骼為踝關節助力是比較合適的階段。以此為目標,為踝關節助力外骨骼設計輔助力。
利用踝關節力矩變化以及腳跟離地狀態為設計標準來為踝關節助力外骨骼的輔助力曲線進行設計。利用一個正弦曲線去擬合踝關節輔助力曲線,踝關節足底屈曲的最大生物力矩平均值為60 N?m,踝關節旋轉半徑平均值為0.04 m,并且為了不對人造成損傷,將踝關節力矩按5%進行縮放,即施加于踝關節的最大輔助力峰值為80 N。
3.3 控制器設計
本文的工作簡化了分層控制策略,降低了控制復雜度,如圖6所示,控制系統包括PD控制器、位置控制器、執行器系統、外骨骼、拉力傳感器、足底壓力傳感器、步態識別和力軌跡生成。PD控制器在柔性外骨骼單運動輔助中表現良好[29],如下所示:
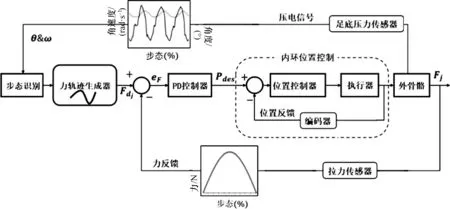
圖6 踝關節助力外骨骼控制框圖

式中:KP和KD分別為比例控制器與微分控制器的參數矩陣,KP?R2×2,KD?R2×2。
當整個系統可以正常運行時,首先通過足底壓力傳感器獲取人體足底信息,進而分析人體步態。然后根據步態周期,生成輔助力大小和執行時間。最后,PD控制器調整系統誤差,使電機能輸出準確的所需力,并作用于人體,幫助用戶減少代謝肌肉疲勞程度。同時,系統還根據力反饋和電機位置反饋來減小誤差。
4 助力性能評估
本章討論踝關節助力外骨骼的助力性能評估效果。
4.1 實驗設置與協議
本實驗共邀請了4位志愿者參與測試,并在進行實驗前向所有參與者解釋了實驗的內容及其產生的影響。所有受試者均未報告有任何病史,以及任何會影響心血管、呼吸或中樞神經系統等。
4.2 表面肌電信號評價
在表面肌肉電信號評價實驗中,使用采用頻率為1 000 Hz的sEMG設備去采集表面肌電信號,并將其用于分析疲勞程度。如圖7所示,整個實驗設備由踝關節柔性助力外骨骼、跑步機、主機以及sEMG設備組成。受試者以5 km/h的速度行走在跑步機上,表面肌肉電機附著在右腿的腓骨前肌、內側腓腸肌、比目魚肌。

圖7 使用sEMG采集肌電信號
整個實驗需要完成3組實驗,包括使用踝關節柔性外骨骼行走、穿戴踝關節柔性外骨骼不助力行走和不穿戴外骨骼時行走。每組實驗行走5 min,每組之間休息10 min,以此保證受試者能充分休息。
采集完實驗數據使用均方根(RMS)進行分析肌肉疲勞程度,RMS值越高,意味著肌肉疲勞程度越高。3組肌肉疲勞程度對比如圖8所示,可以發現,實驗結果顯示在外骨骼的輔助下,腓骨前肌、內側腓腸肌、比目魚肌的肌電信號均方根值分別降低了7.2%,13.4%和8.9%,即該外骨骼能夠有效減小小腿肌肉疲勞。
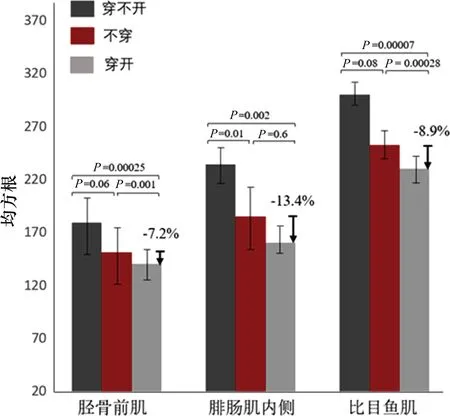
圖8 肌肉疲勞程度對比
5 結束語
本文設計了一種踝關節柔性助力外骨骼系統,通過Vicon動作捕捉實驗采集人體行走過程中的關節角度信息和足底壓力數據,利用生物力學分析軟件Opensim分析踝關節的運動特性,確定踝關節做正功時段;基于踝關節的運動特性設計了足底壓力識別、電機驅動、繩索傳動的柔性外骨骼,輔助踝關節跖曲;采集小腿肌群的肌電信號,評估外骨骼的助力效果。實驗結果證明所設計踝關節柔性助力外骨骼系統可在正常行走過程中減小肌肉活性。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年17期)2017-09-08 13:08:58
海峽姐妹(2017年7期)2017-07-31 19:08:17
