V型輪在輸電線路機器人的應用研究*
2022-05-12 13:06:54
現代機械 2022年2期
(江蘇省送變電有限公司,江蘇 南京 211102)
0 引言
近年來,隨著我國經濟的飛速發展,架空輸電線路規模迅速擴大,平均每年以不低于4%的速度增加。根據《中國電力年鑒》,截止2017年底全國高壓架空輸電線路總里程已超過180萬公里。受限于專業技術工人隊伍成長緩慢,結構性缺員情況日益嚴重,架空輸電線路建設、運行、維護、檢修等工作向智能化、自動化轉型需求迫切。
現有的架空線路新型設備中,輸電線路機器人以其適應性強、出勤率高、工作質量穩定、成本低,具有廣闊的發展前景。輸電線路機器人能在輸電線路上自主地行走、跨越障礙,通過攜帶的視覺系統、導航系統、智能分析處理系統、作業系統等設備,可以完成或輔助人工完成線路的安裝、巡視、檢修等工作,且不受地形地錨、氣候條件、空中管制等因素影響,工作質量穩定[1-5]。
基于導地線行走的輸電線路機器人,由于相鄰桿塔地面高程、塔高以及導地線弛度因素的影響,機器人在工作過程中,始終處于有一定坡度的行走路徑上,因此爬坡性能是其關鍵的性能指標。本文從線路飛車上V型行走輪多年的應用經驗出發,根據機械傳動中V型帶輪的設計原理,研究V型輪槽的行走輪在線上行走的力學特性,分析得出其最優設計參數,使機器人獲得最佳的運動性能,提升機器人性能指標、降低功耗。
1 V型輪在輸電線路機器應用的結構設計
輸電線路機器人使用的V型輪是指輪槽底為V型或等腰梯形的驅動輪,考慮線上行走的輪外徑的尺寸不宜過大,通常采用等腰梯形設計。該等腰梯形的底邊和斜邊長根據行走的導地線線徑確定,其斜邊的斜角最優值受不同材質的摩擦系數影響。
全尺寸的V型輪設計,在機器人沿彎軌道的導地線過橋引導桿行走時,引導桿和V型輪之間的摩擦力偏于一側的V型斜邊,致使V型輪在此處的V型輪斜邊爬升,從而引發脫輪,機器人有墜落的危險。因此,全尺寸V型輪槽的設計不利于機器人線上行走平穩地過彎,鑒于此種原因,行走輪的設計可采用V型+2R型相結合的型式,詳見圖1。
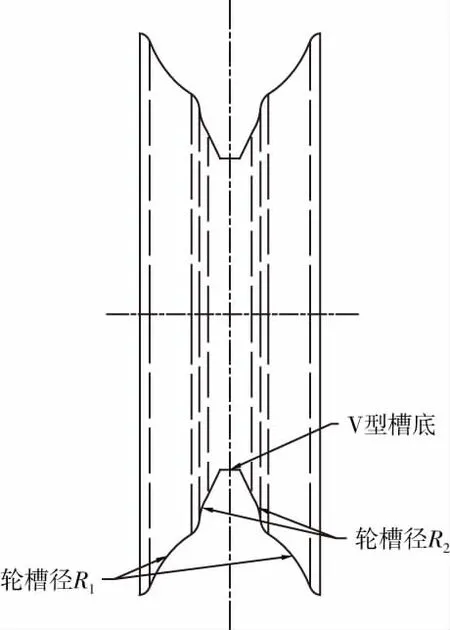
圖1 組合型行走輪結構

圖2 組合型行走輪模型圖
V型+2R型輪槽設計在正常行走時,V型槽底可以對導地線產生更大靜摩擦力,給機器人提供更好的驅動力;在碰到障礙時,通過兩種不同半徑的圓弧形輪槽碾壓障礙物,使過障礙更加平順;同時,較大半徑的圓弧形輪槽徑R1,可以獲得較大的槽頂開口而不必增大槽深,使機器人跨越障礙后落線準確度更高。
該型行走輪通常采用鋁合金材質包膠或使用復合材料,兼顧摩擦力、耐磨性和輕量化。實物模型如圖2。
2 V型輪在輸電線路導地線行走的力學分析
2.1 剛體受力模型
V型輪在導地線上行走時,忽略其微小的彈性變形,將輪和導地線均認為是剛體,由此確定其受力模型,如圖3。
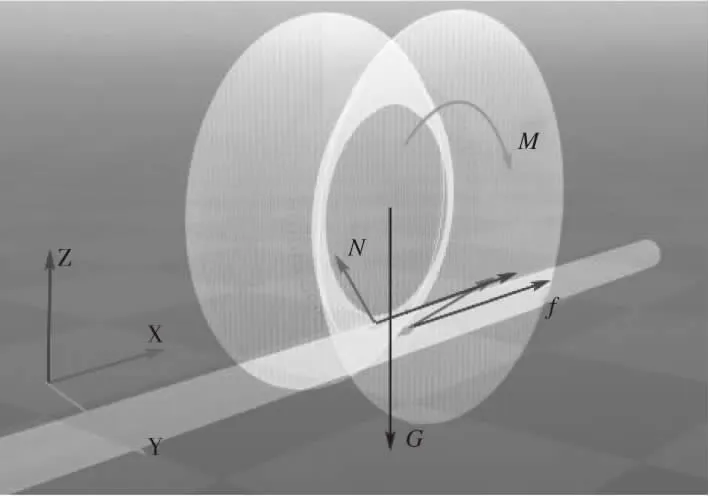
圖3 行走輪受力模型
V型輪在導地線上受到豎直向下的重力G,由于動力矩M的作用在兩個接觸點分別受兩組沿前進方向靜摩擦力f、垂直于V型輪斜邊向上的支撐力N。
在輪子沿導地線勻速運動時,根據力平衡原理:
此時,∑X=0,∑Y=0,∑Z=0。
由圖3可以明顯看出,輪子受向前的靜摩擦力f,而無反向的阻力,在X軸方向上受力不平衡。只有在動力矩M為0時,靜摩擦力f消失,此時輪子才可勻速向前運動。
在無動力的情況下,輪子能勻速前進,此種情況顯然與實際情況不符。因此,我們根據實際情況引入彈性變形情況進行修正。
2.2 圓形輪槽彈性變形狀態受力模型
在實際情況下,由于輪子和導地線均不是理想的剛體,因此在接觸時受到約束力影響,二者會產生彈性變形。在此情況下,二者的接觸非點接觸而是面接觸。因此,其受力模型如圖4。
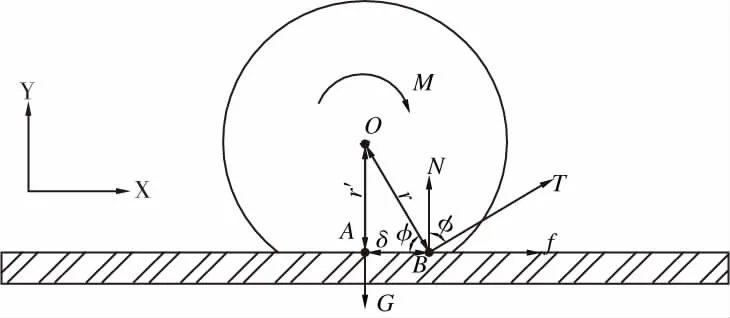
圖4 彈性變形狀態驅動輪受力模型
在輪子靜止或勻速運動的情況下,作用于輪子的主動力矩為M,產生一個對輪子的作用反力T,從而達到力偶平衡。此反作用力T可以等效為作用在點B,則B點必定在A點的前進方向側,AB距離δ由輪子彈性形變產生[6-8]。將T沿x、y軸分解為沿前
進方向的靜摩擦驅動力f和豎直支撐力N,根據力偶平衡:
N×δ+f×r′-M=0
(1)
由于輪子變形較小,可近似認為r′與輪半徑R相等,整理式(1)得:
(2)

2.3 V型輪槽彈性變形狀態受力模型
V型輪槽的行走輪在導地線上勻速行走時,其等效作用點為一對位于V型輪斜邊上的點,此時的支撐力N垂直于V型輪斜邊向上。
V型輪槽的行走輪不同于圓形輪槽行走輪,當其在線上勻速行走時,假設此時只受支撐力N,那么N=G/sinα,α趨于0°時N趨于∞,顯然與實際情況不符。在實際情況下,兩塊豎直的板夾住圓柱體,因壓力產生靜摩擦力平衡重力作用,壓力N不會趨于∞。由此,修正力系,此時V型輪受到重力G、支撐力N以及沿斜面向上的靜摩擦力f。因此,導地線夾在其兩個斜邊中間,因輪產生彈性形變,當輪轉動導地線自兩斜邊間脫開時,必然產生相對滑動,此時產生向下的滑動摩擦力。由于自等效作用點B向后方支撐力N逐漸減小,而AB之間距離極其微小,因此也可近似認為該滑動摩擦力等效作用在B點。
V型輪槽受力模型如圖5。
由于圖5中B點和B’點受力情況相同,取B點
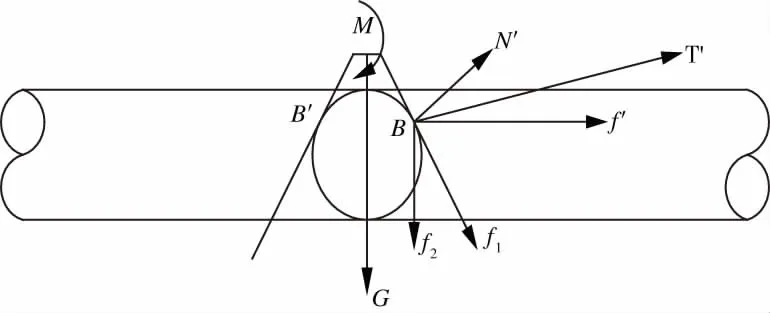
圖5 機器人行走輪彈性變形狀態受力模型
進行分析:作用于輪子的主動力矩為M、重力為G(在B點等效為M/2和G/2),產生一個作用反力T’,此力分解為沿前進方向的分力f’和垂直于輪槽斜面的支撐力N’,輪轉動產生沿斜面向下的動摩擦力f1,其豎直方向分力為f2,設V型輪斜邊斜角為α,結合圖2中模型,根據力偶平衡有:
(3)
設f’和T’夾角為ψ,f′=T′×cosψ;根據摩擦力公式,動摩擦力f2=f1×cosα=N′×μ×cosα,μ為動摩擦系數。代入公式(3)整理得:
(4)
由于輪子變形較小,可近似認為r′與輪半徑R相等,應用三角函數公式整理得:
(5)
(6)
對比公式(2)圓形輪槽的驅動力f,則有:
f合max>f
(7)
所以可以得出結論:
1)在同等驅動轉矩情況下,V型輪槽的行走輪比圓形輪槽的行走輪可以獲得更大的驅動力,具有更好的行走效果。
導地線的外層材料為鋁,考慮各種行走輪材質和鋁的摩擦系數,V型輪槽斜邊傾角最優值應在30°~45°之間。
3 結束語
本文通過力學分析,為V型輪在輸電線路機器人中應用提供理論依據,在V型輪的參數設計和材料選擇上有參考價值。由上文的結論可知,V型輪最佳驅動效果的斜邊傾角與摩擦系數有關,在輸電線路機器人的應用中可以合理選擇材料和傾角,從而獲得最佳的行走效果,能夠有效的增加機器人的續航里程、爬坡能力、克服風偏和覆冰的影響。
V型輪結構在機械傳動的帶輪設計中有著廣泛的應用,實踐證明其有著優異的性能。在輸電線路檢修的應用中,部分飛車廠家通過產品的實踐驗證,V型輪結構比傳統的圓形輪槽結構具有更好的驅動效果,對克服掛線點高差以及導地線弛度引起的坡度有著良好的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
