低空無傘無損空投包裝設計及其自穩和緩沖性能驗證
2022-05-12 05:42:42賈山高翔宇陳金寶王永濱
航天返回與遙感 2022年2期
關鍵詞:結構
賈山 高翔宇 陳金寶* 王永濱
低空無傘無損空投包裝設計及其自穩和緩沖性能驗證
賈山1,2,3高翔宇1,2,3陳金寶*1,2,3王永濱1,3,4
(1 南京航空航天大學航天學院,南京 211106)(2 深空星表探測機構技術工信部重點實驗室,南京 211106)(3 航天進入減速與著陸技術實驗室,南京 211106)(4 北京空間機電研究所,北京 100094)
無傘空投具有準備時間短、投送迅速、包裝簡單、受氣象影響小、著陸散布小、可重復利用等優點,成為未來救災工作中裝備物資保障方式的一種新型空投方式。基于某運用需求,文章給出了一種低空無傘無損空投包裝設計方案,并針對單/雙層的風阻結構設計與偏質心程度對下落過程的影響,進行了對比分析;同時,對拉桿結構在觸地緩沖過程中的吸能效果進行了仿真分析。該設計可基于自主展開的柔性風阻結構和偏質心特性,實現下落過程的姿態自穩;將50m高度空投的落地精度控制在了0.1m范圍內,并將落地緩沖過程的最大過載限制在2 500n以內。該設計為面向低空空投的空投包裝提供了一種解決方案。
低空空投 無傘空投 姿態自穩 緩沖吸能 返回技術
0 引言
空降空投是指從運輸機或直升機上將人員、物資或裝備投送至地面或水面預定區域的行動,其裝備主要用于救災以及邊遠地區運輸等領域[1]。傳統的空投采用降落傘對物資進行投放,投放精度受高度以及風場影響較大,所需的降落區域面積大[2-3],而無傘空投是指裝備物資不系降落傘,直接從飛行器上投擲的方式[4]。無傘空投憑借其具有準備時間短、投送迅速、包裝簡單、受氣象影響小、著陸散布小、可重復利用等優點,逐漸成為未來救災行動中裝備物資保障方式的發展趨勢[5]。目前,無傘空投的研究方向主要有兩個:現有空投包裝的結構優化[6-7]、研制新型緩沖裝置[8-10]。
國外相關高效空投研究起步較早,但其主要研究方向為基于預測和控制的精準空投技術,例如美國空軍提出的先進的精確空投系統(APADS)[3],其利用“智能化”技術來控制投放各種補給和裝備,由各種自主導引的滑翔式減速器系統組成,可以在各種不良天氣條件下(如夜晚、霧天)執行任務。通過采用最新的制導技術和傳感技術(例如:GPS和紅外風傳感器),精確空投系統的空投高度可以達到7km,空投落點(Circular error probability,CEP)可以達到百米范圍內[11]。加拿大的“Sherpa”精確空投系統[12],該系統是結合基于預測和基于抗干擾這兩種精確空投系統。既有先期的著落軌跡,也能夠在飛行過程中進行控制。
目前,國內對于無傘空投的研究大部分還停留在理論研究以及仿真分析階段,現有的較成熟的無傘空投包裝多利用緩沖氣囊作為緩沖設備進行緩沖[13-14],且研究重點側重于充氣結構設計[15-17]。緩沖氣囊的優點在于可以重復使用,且具有較強的地面適應能力[18-19],好的氣囊系統可以減小物資本體所受的沖擊力,避免內部物資的損壞[20],但緩沖氣囊技術也有諸如緩沖行程有限以及控制精度不高等缺點[21]。趙西有等通過對緩沖包裝材料的深入研究和緩沖包裝方式的科學設計,研制了一種液體類食用物資空投緩沖包裝,可在200m的高空成功無傘空投[22];劉勝祥等采用蜂窩紙板為結構材料制作包裝箱,完成了小體積低質量物資的低空無傘空投,結果表明,該無傘空投包裝箱具有可靠性高、費用小、可回收重復利用的優點[23];王宏等設計了一種雙層高強度聚丙烯材料的包裝方案,研究了包裝袋從200m高空著陸沖擊過程中包裝袋形狀變化及應力的變化過程,找出了可能對包裝袋造成破壞的原因和最容易破壞的部位,并驗證了雙層高強度聚丙烯材料包裝方案的可行性[24]。
鑒于現有大部分中等質量固體的低空無傘空投均為針對緩沖氣囊進行的研究。為此,本文以現有直升機空投設計為基礎,擬設計一套空投包裝系統方案,方案內包括空投包裝支架以及空投包裝本體。其中空投包裝支架可保證空投初始下落姿態,而空投包裝本體則是一種全新的利用“偏質心”本體(質心在本體軸線上相較形心靠近空投本體下端面一側)以及柔性風阻結構在空中保持姿態,并利用泡沫鋁以及拉桿吸能機構進行緩沖的無傘無損空投包裝。同時為驗證包裝本體可用性,對空投包裝本體利用有限元流體力學計算軟件ANSYS Fluent和有限元力學計算軟件ANSYS Workbench中的顯式動力學計算模塊分別進行了下落過程以及觸地瞬間緩沖元件的分析,成功完成了20kg物資在50m空中的無傘空投任務,保證了物資的安全,為面向低空空投的空投包裝提供了一種新的解決方案。
1 設備器材無傘無損空投包裝設計
1.1 設計指標及要求
本文中所設計的空投包裝以設備器材等觸地沖擊耐受性較差且具有一定精密度的物資為對象,面向任務,提出如下的性能指標:
1)空投高度≤50m;
2)物資凈質量≤20kg;
3)觸地緩沖階段峰值過載<2 500n。
1.2 整器設計方案
本文以直升機空投為例,依據1.1節中所提出的設計指標及要求,假設物資本體裝在一圓柱形容器中。為最大程度利用直升機艙內空間,提高物資本體在空投包裝中的體積占比,保證落地精度,現提出一種如圖1所示的設備器材類物資無傘無損空投包裝系統方案,該方案主要由待空投物資支架以及空投物資包裝兩部分組成。
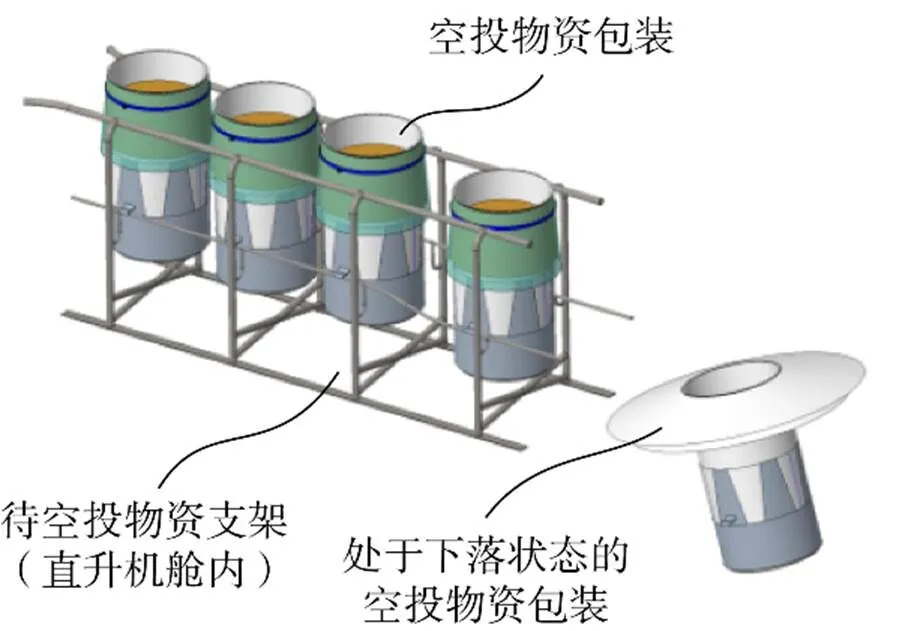
圖1 設備器材類物資無傘無損空投包裝系統方案
由圖1可看出,待空投物資支架可獨立且方便地安置于執行空投任務的直升機艙內,也可以為待空投物資的擺放和拋投等作業提供操作界面,使得作業過程更加安全有序,也有利于保證被拋離機艙的被空投物資包裝以期待的初始姿態開始下落,從而在觸地緩沖過程中充分發揮該包裝方案的吸能作用,從而保證了包裝內儀器設備等物資的安全;空投物資包裝即為放置被空投儀器設備等物資的容器,通過頂部可被動展開柔性風阻結構和本體“偏質心”結構等特殊設計,使得從支架上滑落的空投包裝可在特定的姿態范圍內下落,且具備在下落過程中抵抗小幅擾動(例如橫風等)的能力,從而以近乎豎直的姿態完成觸地,充分發揮其內部吸能材料的性能,即只需要在豎直方向上設計專門的緩沖吸能結構,相較于傳統空投需要在物資周邊全方位包裹緩沖吸能材料的設計具備更高的空間和材料利用效率,有助于在滿足裝載能力的前提下實現包裝結構的輕量化和緊湊化。整體工作流程如圖2所示。
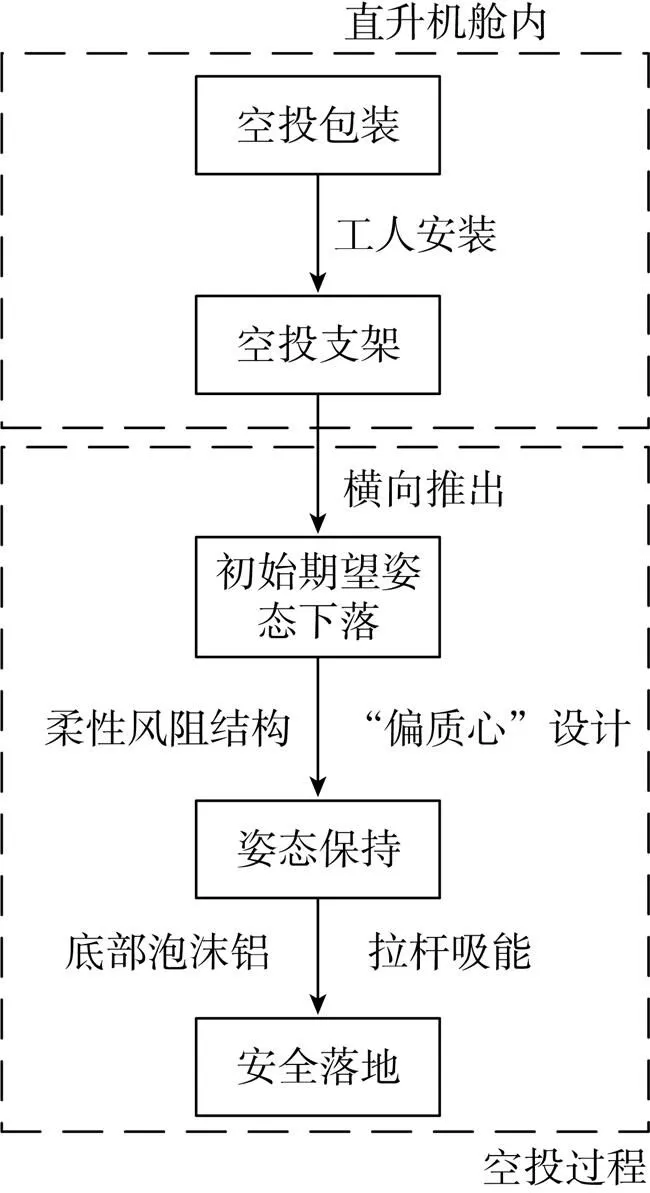
圖2 無損空投包裝工作流程圖
1.3 物資支架設計方案
依據1.2節中提出的整體方案,圖3為待空投物資支架的初步設計方案,其主要功能部件為被動展開柔性結構限位桿和空投物資包裝滑軌。在朝向機艙內方向的起始端,限位桿呈喇叭口造型,有助于在空投作業時將被空投的物資包裝快速、準確、平穩地放置在滑軌上;滑軌主要功能是托舉處于隊列狀態的待空投物資包裝,可在其上設計專門的“凹槽+滑輪”組件,有助于減輕執行空投任務時的人員作業強度,將拎起—平移—拋投的動作模式轉換為簡單的平推,滑軌的中后段特別設計為兩段圓弧外切形成的平滑過渡下降坡道,可使得被推移至該位置的物資包裝在重力勢能差作用下加速,拉大與緊隨其后的物資包裝之間的間隔,在保證物資包裝從機艙有序拋離的同時,有效避免空中碰撞造成的下落姿態失穩,引起觸地緩沖吸能結構失效,導致所搭載的儀器設備的損壞。
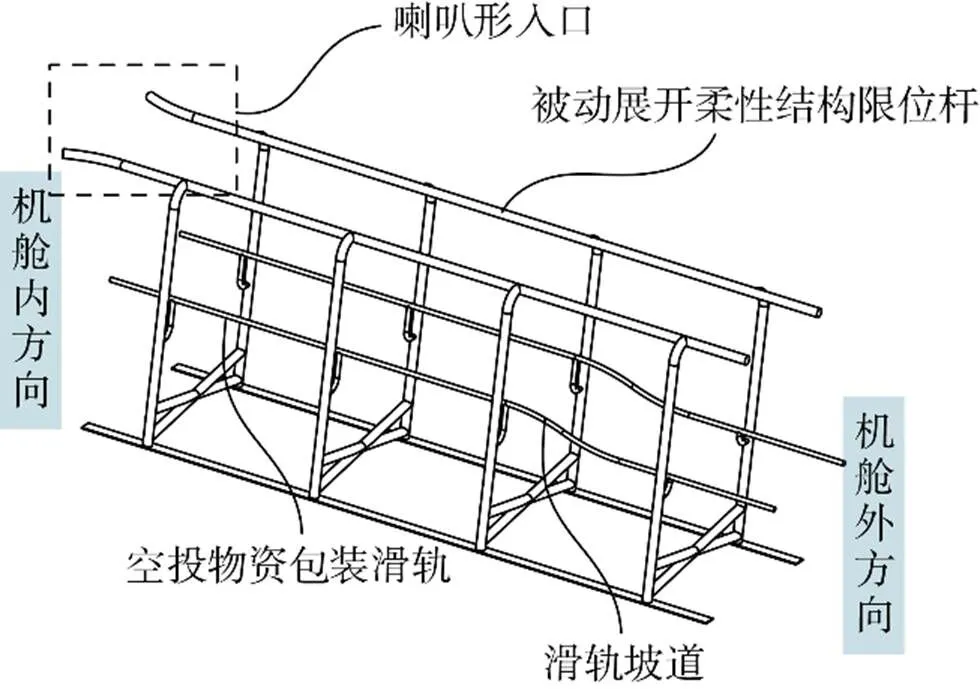
圖3 待空投物資支架設計方案
1.4 包裝本體設計方案
依據1.2節中提出的整體方案,被動展開的風阻柔性結構處于收攏狀態時的物資包裝如圖4所示,主要由風阻柔性結構卡箍、雙層風阻柔性結構和“偏質心”本體等三部分組成。卡箍通過安全銷鎖定,用于束縛處于收攏狀態的被動展開風阻柔性結構,當物資包裝被安置于圖3所示的支架滑軌上,風阻柔性結構的被動展開即處于支架限位桿的約束下,此時,可手動解除安全銷并摘下卡箍;雙層風阻柔性結構采用非金屬彈性材料制成龍骨,采用輕質、高強度的超音速減速傘材料制成蒙皮,可在從支架上滑脫拋離后被動展開,實現風阻調姿功能;物資包裝本體采用上、下分體式設計,上半部分采用輕質、高強度的高分子復合材料制成,主要用于保持包裝本體結構的完整性,下半部分采用鈦合金等高比強度金屬材料制成,主要用于承受觸地沖擊過載,并通過設置于其中的緩沖吸能材料實現沖擊能量的耗散,本體上、下兩部分的質量差異使得本體呈現“偏質心”特點,有利于下落過程中姿態穩定和抵抗微幅擾動的能力;本體下半部分兩側有對稱設計的掛耳結構,通過與支架滑軌的配合,實現物資包裝在支架上的安放。
圖4 風阻柔性結構處于收攏狀態時的物資包裝
圖5為被動展開的風阻柔性結構處于展開狀態時的物資包裝,可見其在解除約束后被動展開的雙層風阻柔性結構。上層風阻結構的展開角度較大,主要用于在下落初期(即剛剛拋離機艙時刻),物資包裝本體縱軸(圖5中物資包裝的中心線)相對于重力方向有較大初始夾角時,提供足夠的姿態自糾正氣動阻力矩;下層風阻結構的展開角度較小,主要用于當物資包裝本體下落姿態角度糾正到理想范圍內后,提供較大的氣動阻力矩,使得受到微幅擾動的本體維持穩定的下落姿態。同時,參考已有的風阻結構以及為保證風阻結構在離開物資支架后的正常工作,初步確定上層風阻結構與軸線夾角為75°,下層風阻結構與軸線夾角為60°。
圖5 風阻柔性結構處于展開狀態時的物資包裝
1.4.1 雙層風阻柔性結構設計
依據圖5所示的空投物資包裝,繪出下落過程的物資包裝本體受力情況(如圖6所示),本體高度為、重力為n、質心距底面為(<1/2,即所謂“偏質心”結構)。當本體沿重力方向豎直下落時,由于從圖1所示支架上拋離時存在水平方向初始速度(雖然很小,但不能完全忽略),以及直升機飛行速度、空中橫風氣流等因素的影響,將存在一個初始姿態角max。
此時,由于本體遮擋效應,本體迎風面(圖6中本體左側部分)將承受比背風面(圖6中本體右側部分)更大的分布式氣動阻力,與此同時,由于有更大的展開角度,雙層風阻柔性結構中的上層部分將承受比下層部分更多的氣動阻力,最終,本體上承受的氣動阻力和風阻柔性結構上承受的氣動阻力將形成一個合力,假設該合力與重力平行,且它們之間的距離為,則在本體質心處產生圖6所示方向的回復力矩。
圖6 物資包裝本體在下落過程中的受力情況
當本體姿態逐漸往豎直的期望姿態偏轉時,下層風阻柔性結構將逐漸承受越來越多的氣動阻力,并且由于較小的展開角度,將產生“風兜”效應,從而實現下落過程中姿態的自恢復穩定性。
1.4.2 緩沖結構設計
依據所設計的空投物資包裝,繪出圖7所示的物資包裝本體剖面圖,其主要展示落地緩沖組件,該組件由本體外殼、內部容器、泡沫鋁和拉桿等部分組成。本體外殼為圖4所示的“偏質心”本體;內部容器是用于放置被空投儀器設備的空間,也是在觸地緩沖過程中必須保證其結構完好且峰值過載系數不超過某一限制(據1.1節中要求,擬為2 500n)的核心部分;沿周向均布在外殼內壁上的拉桿是外殼和容器之間的接連結構,采用彈性模量適當、延展性較好的金屬材料制成,當觸地緩沖時,容器將在慣性作用下發生相對于外殼的豎直向下的運動,即通過拉桿的塑性變形實現容器動能的耗散;泡沫鋁鋪設在容器底部與外殼之間的位置,主要用于在拉桿結構失效時提供緩沖,使得傳遞到內部容器上的瞬時峰值過載系數限定在期望的范圍內。
圖7 物資包裝本體剖面圖
2 仿真驗證
為確定所設計的“偏質心”本體結構、雙層風阻柔性結構以及緩沖結構能否保證在下落過程中的穩定性以及空投包裝安全落地,分別對下落過程以及觸地瞬間進行有限元仿真驗證。
2.1 下落過程穩定性仿真驗證
2.1.1 模型建立與仿真初始條件給定
為驗證圖5所示的空投包裝在下落過程中的調姿性能,在本節仿真中將其與普通單層風阻結構(僅保留所設計雙層風阻結構的上層風阻結構)進行對比仿真。現給出其與單層風阻結構投影到豎直平面后的結構參數如圖8所示。其中,與點分別代表兩物資包裝的質心位置。
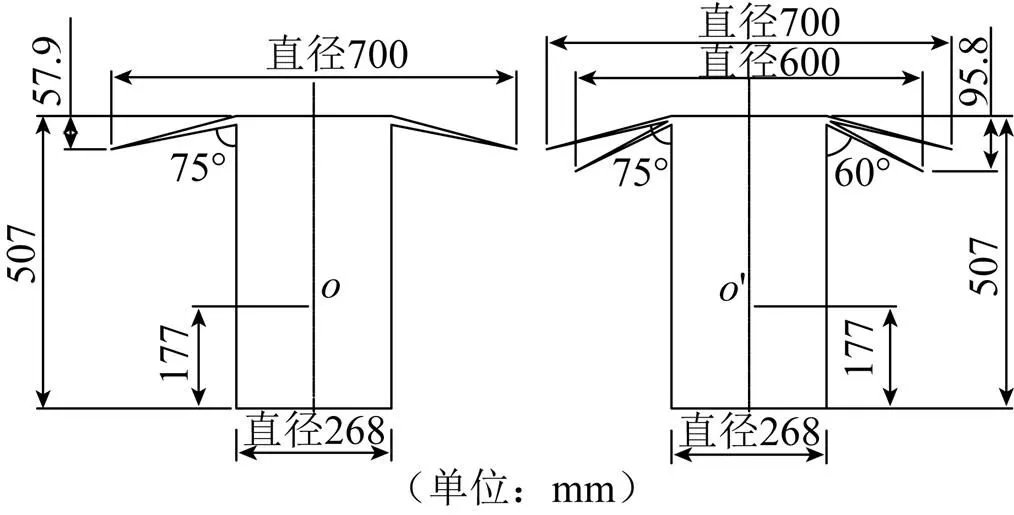
圖8 物資包裝結構參數
在FLUENT軟件中建立如圖9所示的模型網格。其中,兩種風阻結構均采用了全三角形網格,且在本體外表面層做了加密處理,整體網格比例因子為1.0,單元尺寸為100mm,具體加密后的網格參數如表1所示。
表1 風阻結構周邊網格參數

Tab.1 Grid parameters around wind resistance structure

圖9 物資包裝本體周邊網格
在本次仿真中,假設初始下落速度為0,即兩空投包裝本體均以最大45°的初始姿態角沿重力方向下落,同時給出兩物資包裝的質量及慣性條件如式(1)所示。其中,代表空投包裝本體質量,單位為kg,則表示空投包裝繞圖9中垂直紙面方向旋轉的慣量,單位為kg?m2。
將兩風阻結構物資包裝均設置為剛體,同時設置動網格(跟隨風阻結構在空間中位置及姿態變化進行網格更新)參數以及仿真模型邊界及步長,設置仿真總時長為2s并開始仿真。
2.1.2 仿真過程及結果分析
為觀察仿真過程,分別給出仿真進行到一半,即仿真時長為1s以及仿真結束,即仿真時長為2s時空投及其周邊的空氣速度分布圖(如圖10所示)。
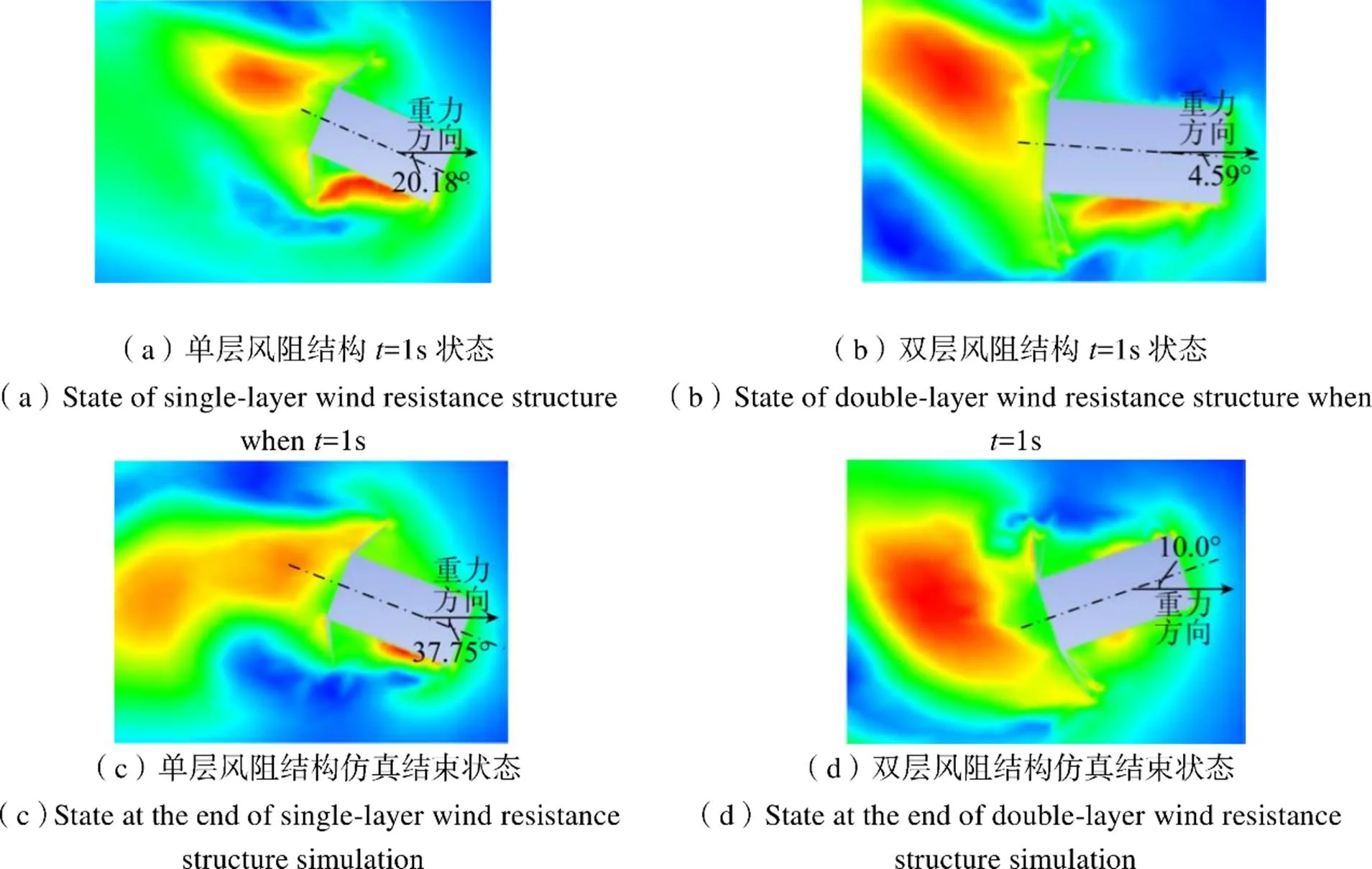
圖10 仿真過程圖
仿真過程中兩種空投包裝的姿態角變化曲線如圖11所示,振蕩幅度數據如表2所示。從圖表中可以看出,單層風阻結構初次完成姿態擺正在0.679s,而雙層風阻結構完成初次姿態擺正的時間在0.644s,相較于單層風阻結構提前了0.035s,且初次振蕩幅度比單層風阻結構小15.46°,但是雙層風阻結構在第一次振蕩后會加大振動幅度,為確定其在之后的下落過程中的狀態,將仿真時長延長至4s并再次進行仿真。
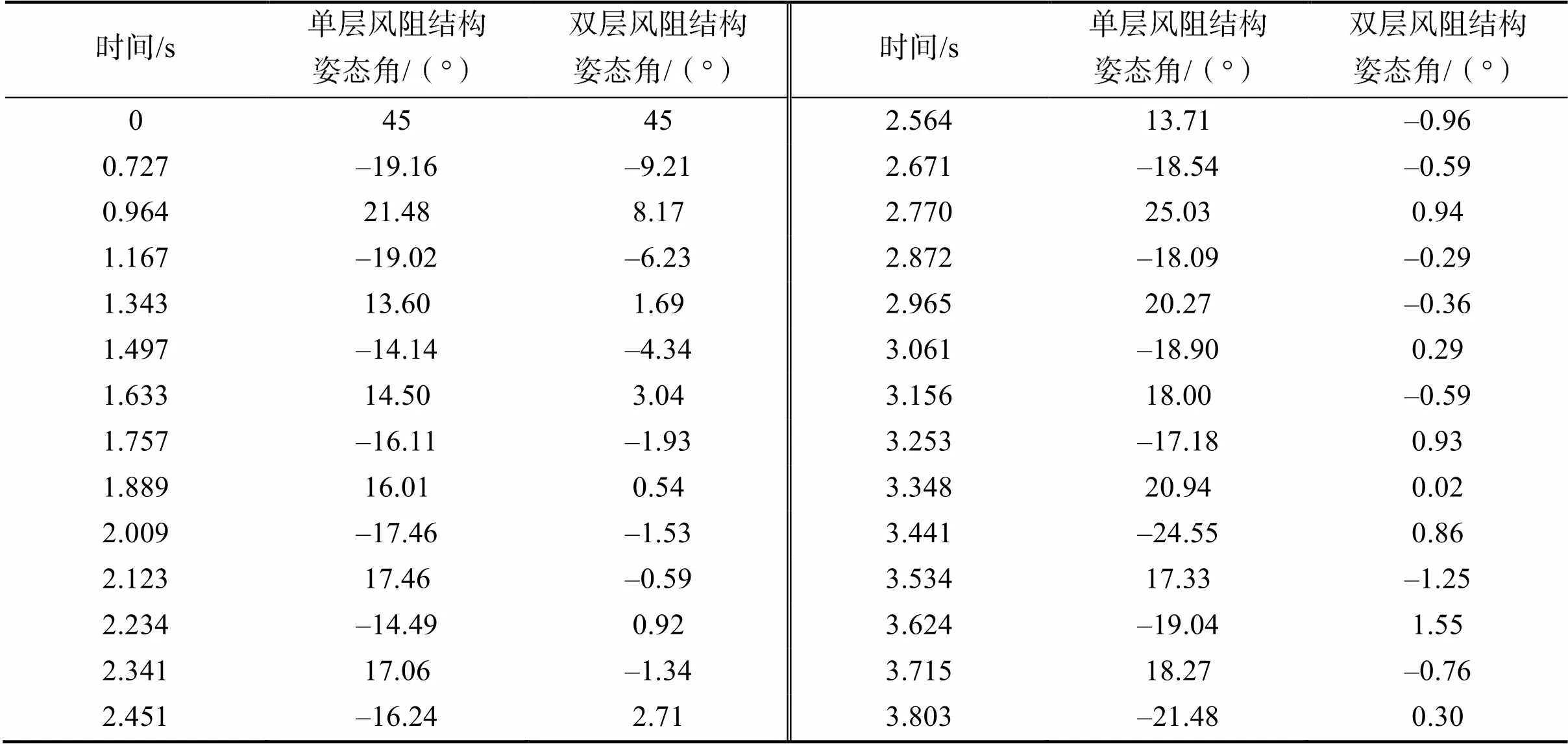
仿真時間延長后,得到的仿真結果如圖12~14所示,圖12及圖13中部分關鍵數據如表3、4所示。其中,圖12表示的是兩空投包裝姿態角變化,從中可以看出,雙層風阻結構振蕩周期約為0.22s,相較于單層風阻結構0.52s的振蕩周期更短,且當處于相同的振蕩周期時,其振蕩幅度比單層風阻結構小0~15°。
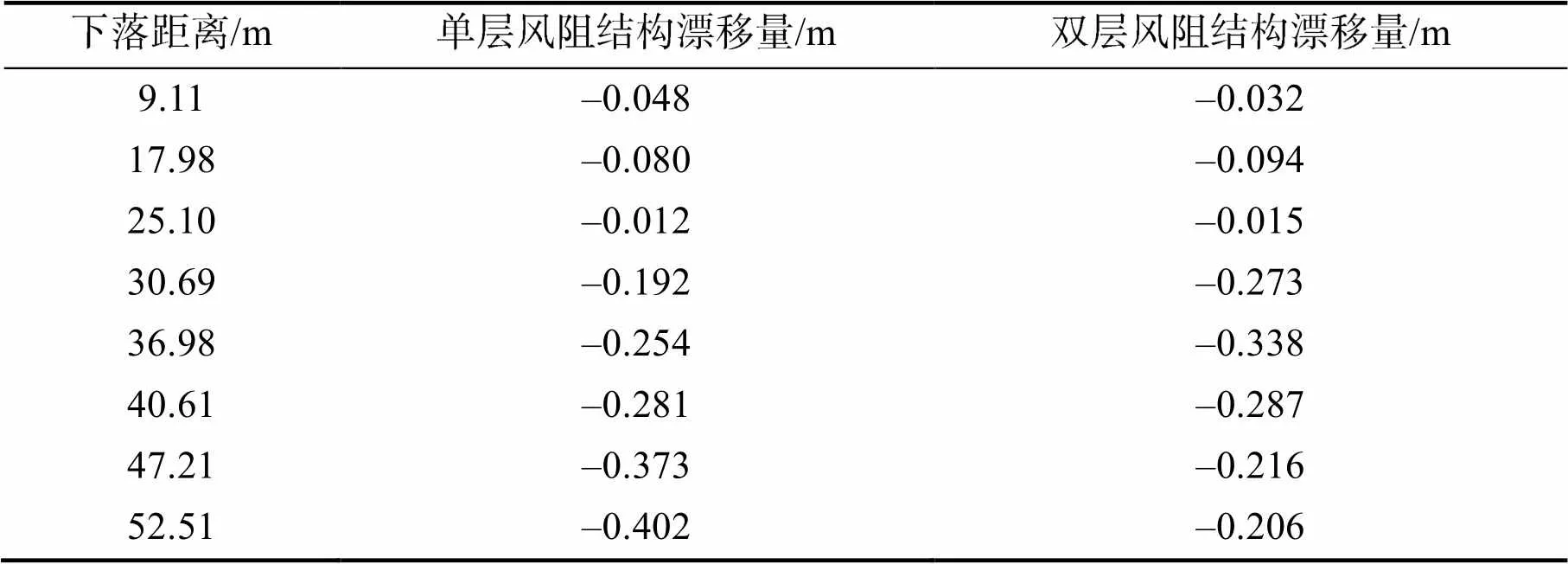
圖13表示的是延長仿真中空投的橫向漂移情況,從圖13中可以看出,單層風阻結構的漂移距離隨下落距離增加而增加,而雙層風阻結構在下落35~40m時會反方向漂移(圖中虛線框部分)。以50m的空投為例,在沒有外界風干擾的理想情況下,雙層風阻結構的落地精度要比單層風阻結構的精度高0.1m。
圖14表示的時延長仿真中空投的下落速度。在圖14中,1與2分別表示單層與雙層風阻結構的終端速度,從圖14中可以看出,在4s的下落過程中,雙層風阻結構的速度相較于單層風阻結構慢0~1m/s,且終端速度比單層風阻結構慢0.4m/s。
表2 空投包裝姿態角數據

Tab.2 Air drop packaging attitude angle data
表3 延長仿真姿態角數據
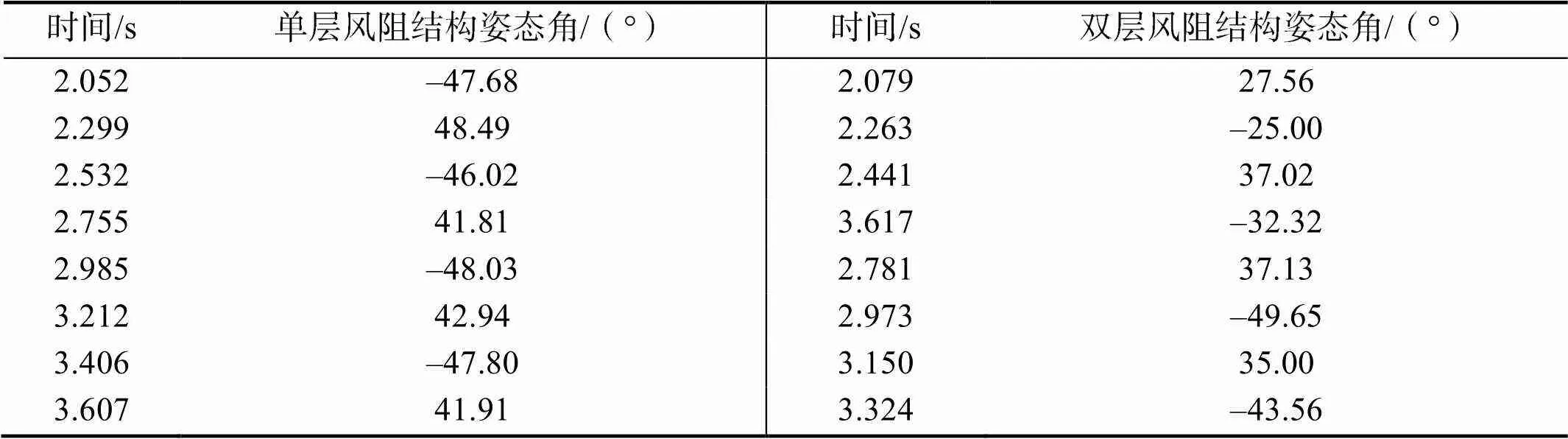
Tab.3 Extended simulation attitude angle data
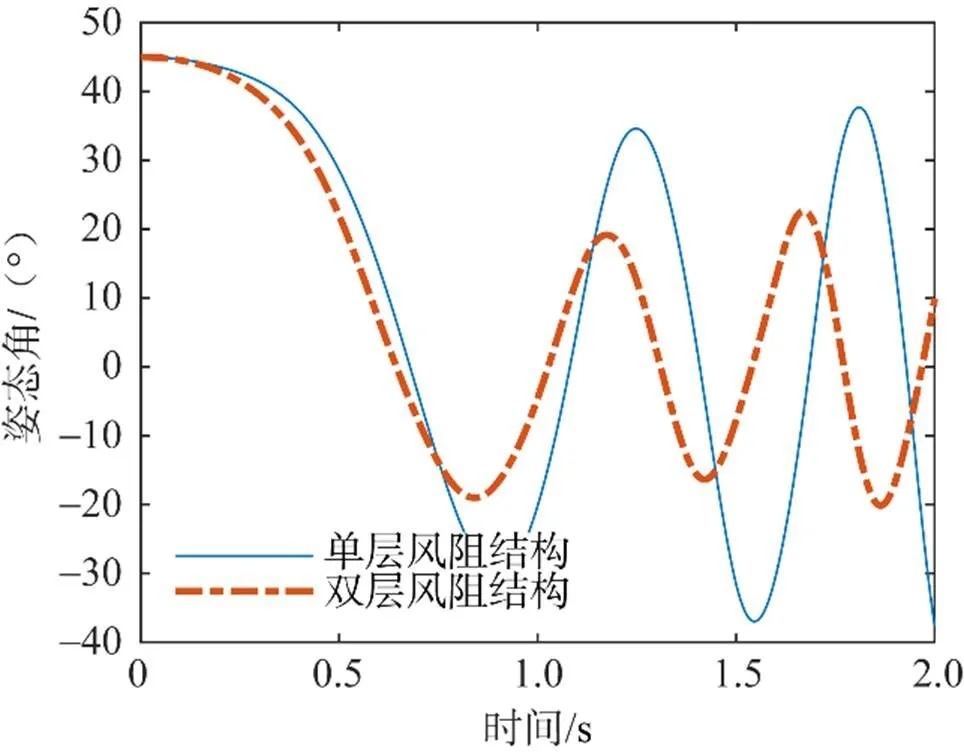
圖11 空投包裝姿態角變化曲線
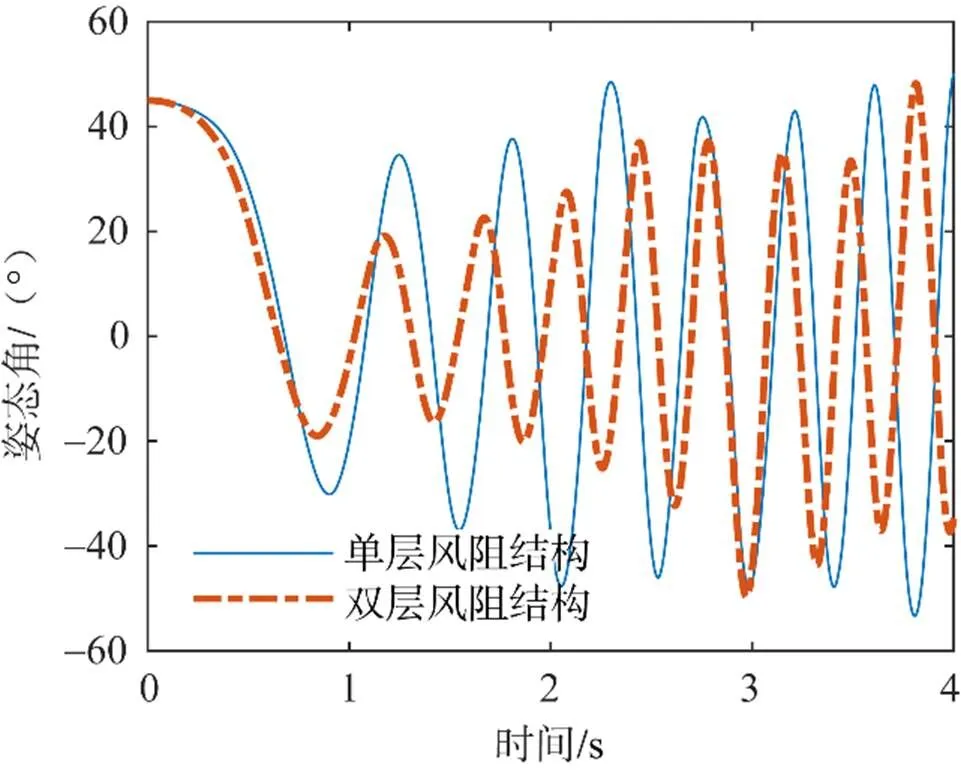
圖12 延長仿真空投包裝姿態角變化曲線
表4 橫向漂移量數據
Tab.4 Lateral drift data
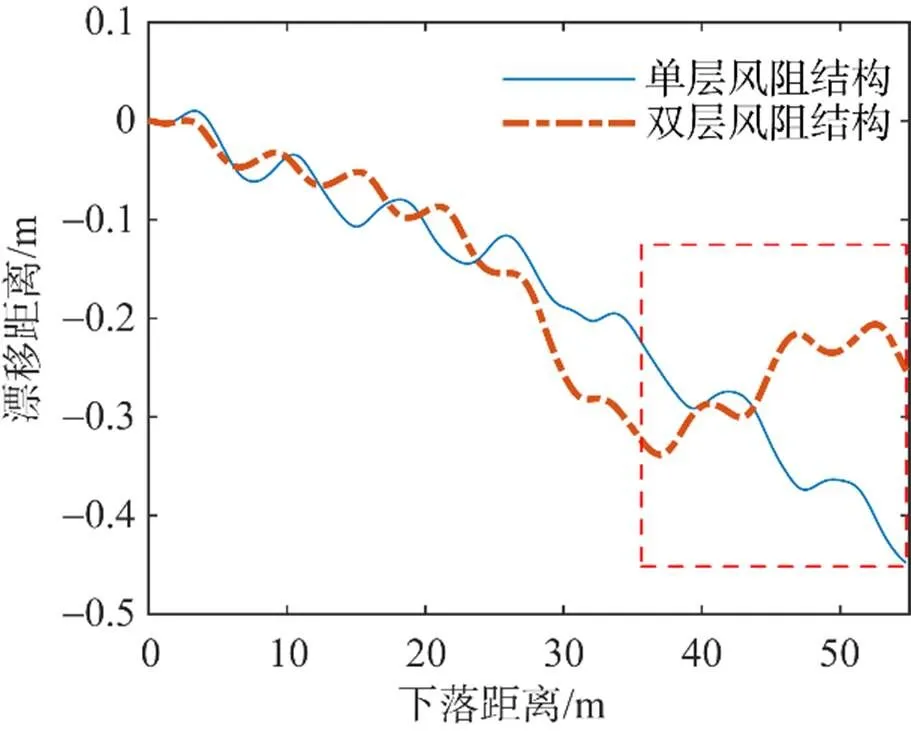
圖13 空投物資包裝橫向漂移距離曲線
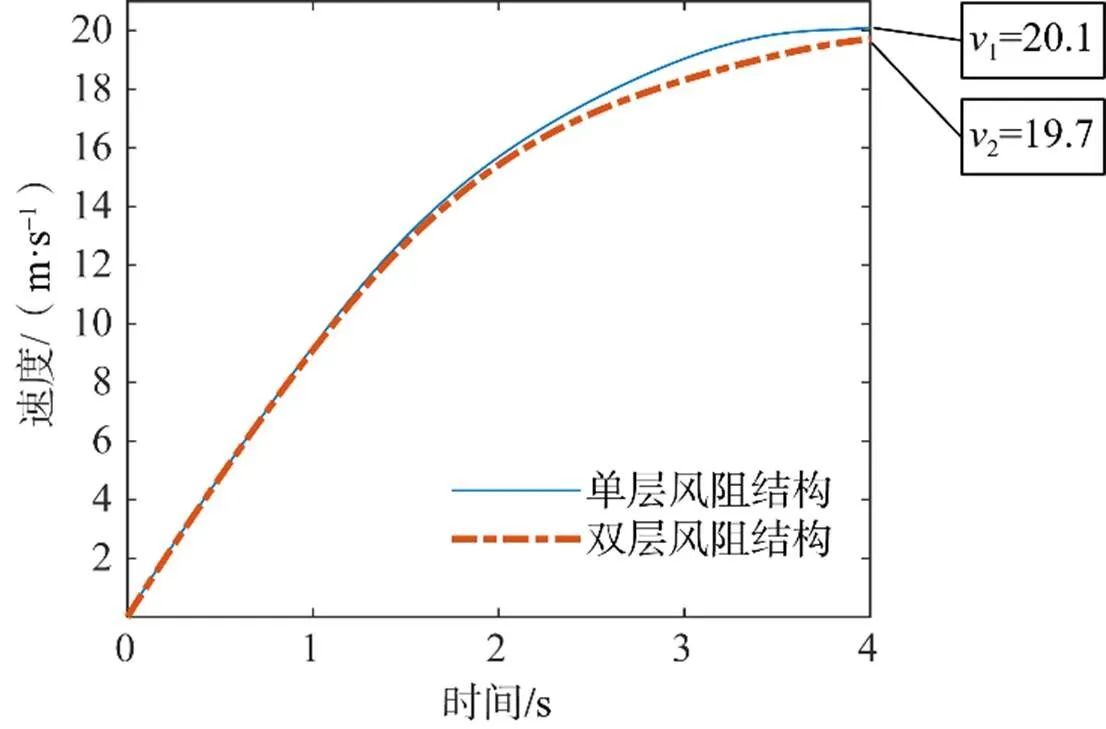
圖14 空投包裝下落速度隨時間變化曲線
經過上述仿真,可以看出雙層風阻結構在下落過程中的調姿性能以及落地精度方面均優于單層風阻結構,但在調姿性能方面,兩種空投包裝結構的最大振蕩幅度均超過初始姿態角,這表明空投包裝的性能并未達到預期,考慮其受空投質心過高導致的調姿力矩不夠大的因素影響,為驗證本猜想,將兩種空投包裝的質心設置在底邊中點上,即相較原仿真降低177mm,并再次進行仿真。
仿真結果如圖15所示,對應關鍵點數據如表5所示。從圖15中可以看出兩風阻結構的調姿性能均得到了極大改善,其中單層風阻結構振蕩幅度在±20°,而雙層風阻結構則在下落2s內將振蕩幅度控制在±4°,穩定性極高。由此可推斷:對本次仿真的兩種結構,質心越低,調姿穩定性能越強,且雙層風阻結構的調姿穩定性能總是優于單層風阻結構。
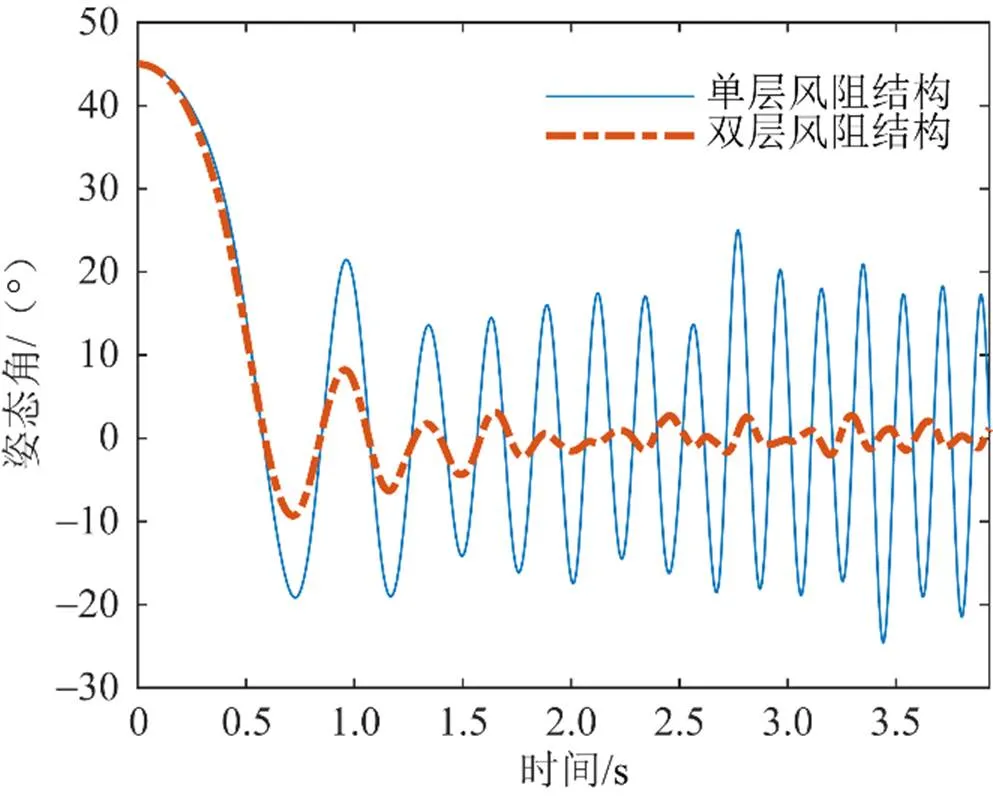
圖15 驗證仿真空投包裝姿態角變化曲線
表5 理想仿真姿態角數據
Tab.5 Ideal simulated attitude angle data
2.2 觸地過程仿真
由于在觸地過程中,物資包裝底部的泡沫鋁作用僅在拉桿結構失效時提供緩沖,故在本次仿真中僅對拉桿吸能部分進行仿真,驗證拉桿吸能裝置的可用性。同時,為充分發揮拉桿性能,假設空投包裝落地瞬間姿態角為0°,且速度方向平行于拉桿工作方向。
同時考慮到此次仿真模型較為簡單,且并無大變形組件,擬運用ANSYS Workbench軟件的顯示動力學模塊進行仿真,該模塊擁有較好的穩定性,且計算速度相較于隱式計算模塊更快。
2.2.1 模型建立以及初始條件給定
依據2.2節中所述簡化方式,建立觸地仿真模型(如圖16所示),其中拉桿為直徑4mm,長度189mm的圓桿結構。
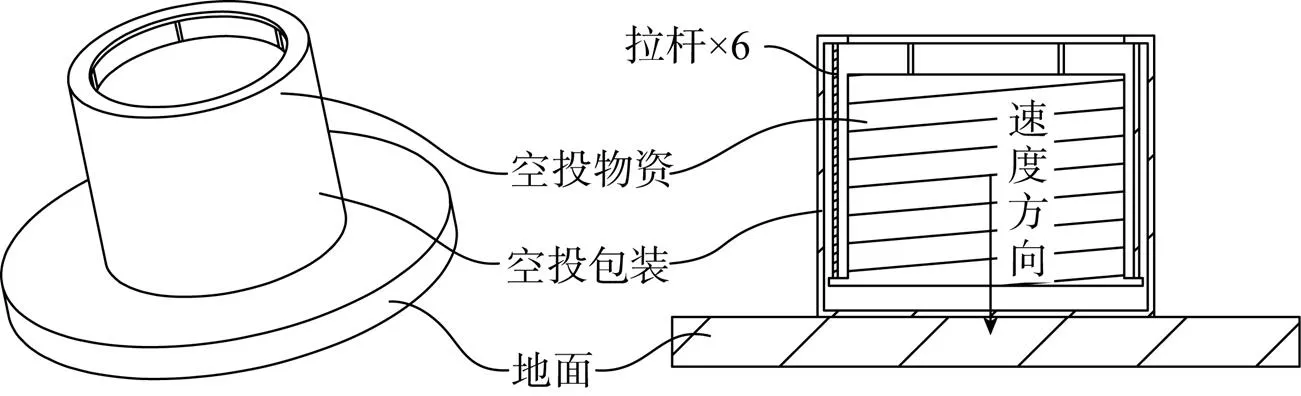
圖16 簡化觸地仿真模型
圖16為觸地仿真模型,將其導入ANSYS Workbench軟件顯式動力學計算模塊,由于本次仿真主要驗證拉桿吸能裝置可否完成對空投物資的緩沖,故將空投物資設為剛性體,同時由于結構簡單,利用ANSYS Mechanical軟件對整體進行默認的網格劃分,其劃分結果如圖17所示。
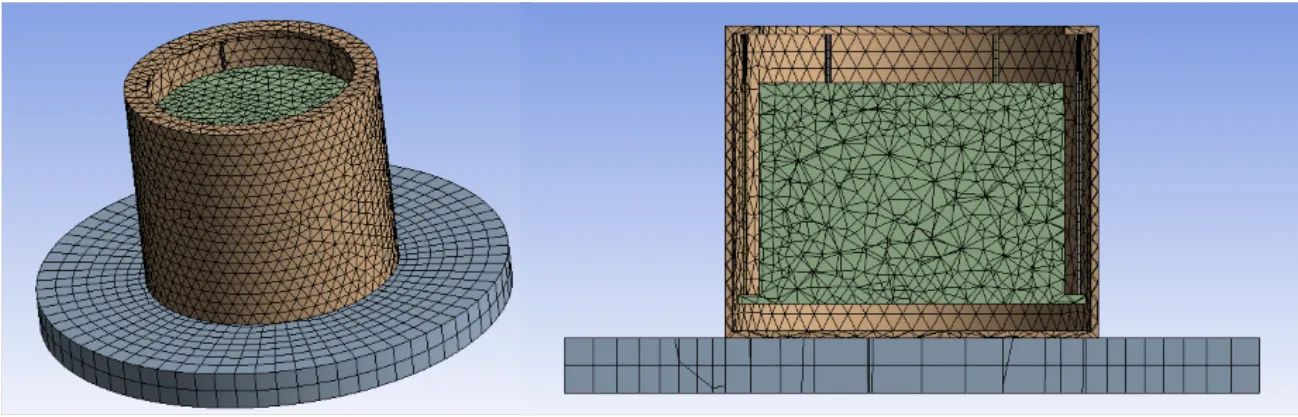
圖17 觸地仿真模型的網格劃分
如圖14所示,雙層風阻結構在正常質心的情況下終端速度為19.7m/s,故將空投觸地速度設為19.7m/s。
對仿真模型各部分材料進行設置:將空投物資包裝外殼,拉桿以及物資本體材料均設為鋁合金,同時為仿真最惡劣落地情況,將地面材料設置為結構鋼。具體的材料參數如表6所示。
表6 材料參數

Tab.6 Material parameters
添加結構連接、地球重力以及地面材料固定支撐,設置仿真時長為1.5×10–3s并開始仿真。
2.2.2 仿真結果分析
仿真結束時空投包裝變形(如圖18所示),可以看出拉桿吸能裝置變形最大處約為17.4mm,伸長率為9.0%,依據文獻[25]內所提供的數據,并未超過鋁型材的最大伸長率,即所選拉桿材料滿足緩沖要求。
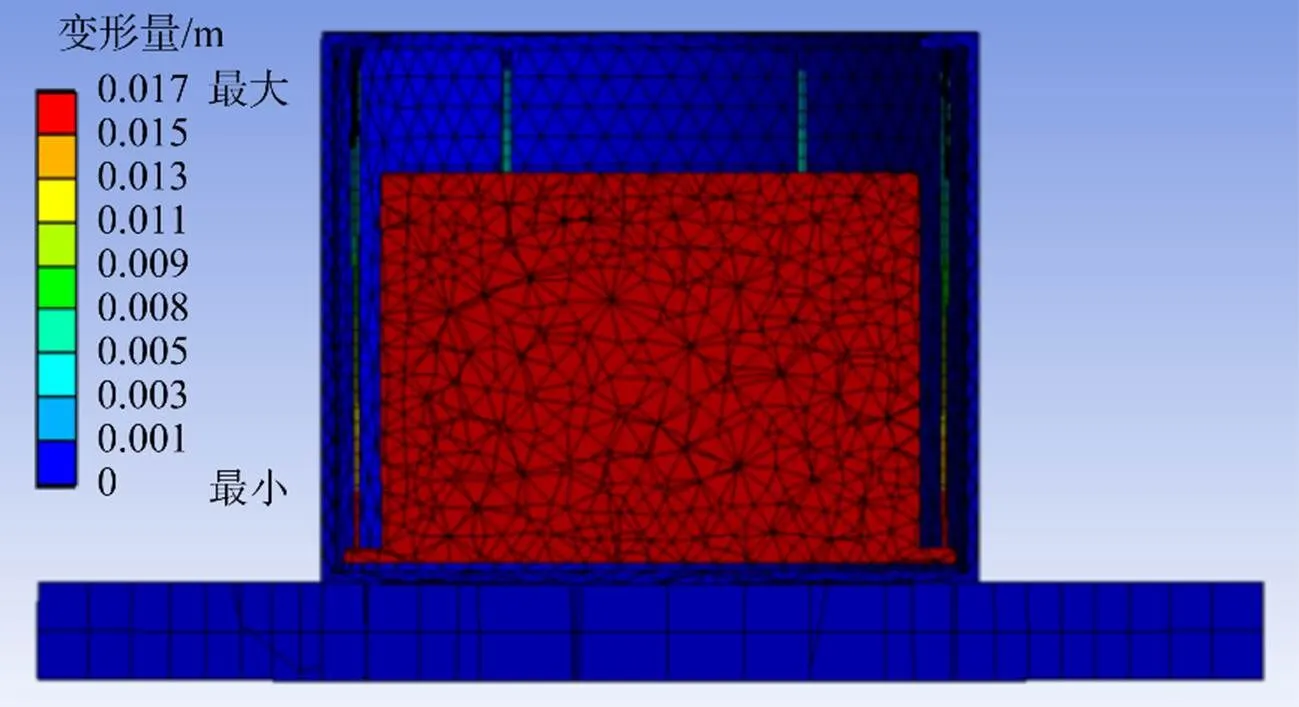
圖18 仿真結束狀態
給出仿真過程中空投物資的速度曲線以及過載曲線如圖19、圖20所示,兩圖均以重力方向為正方向。從圖19中可以看出,拉桿吸能裝置成功地將空投物資的速度降低至0,從圖20中可以看出,整體緩沖過程中的過載均未超過2 200n,完成了觸地過載小于2 500n的任務目標。
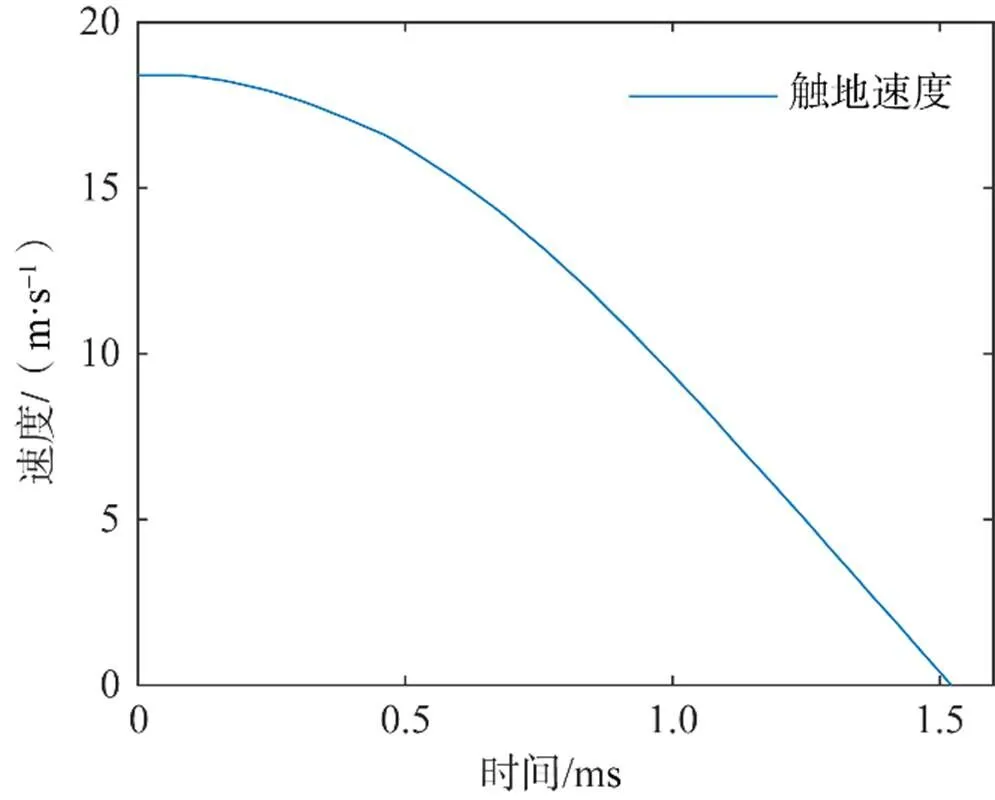
圖19 空投物資落地過程速度曲線

圖20 空投物資落地過程過載曲線
3 結束語
本文提出了一種可以完成低空無損空投的無傘空投設計,并對其進行了下落過程與觸地過程的仿真。得出如下結論:在正常質心條件下,所提出的雙層風阻結構相較于傳統的單層風阻結構在下落過程中的最大擺動幅度小15°,初次完成姿態擺正的時間提前0.035s,振蕩周期短0.3s,終端速度低0.4m/s,在50m空投條件下落地精度高0.1m。對一種極端且在工程實際中不可行的工況進行了仿真,驗證了雙層風阻結構在下落過程中隨質心下移的穩定性。同時驗證了拉桿結構在落地緩沖過程中的可行性,將落地過載控制在了2 200n,成功地完成了設計目標要求,為無傘無損空投的設計提出了新的思路。
本方案通過定性仿真分析驗證,有效驗證了偏質心本體以及雙層風阻結構對空投包裝的穩定性的提升,其中具體質心偏移以及風阻結構夾角、大小等參數還可在后續工作中進行具體優化設計。
[1] 郭海軍. 特種空投概述[C]//第八屆中國航空學會青年科技論壇, 11月5日, 2018年, 江門.
GUO Haijun. Special Airdrop Summary[C]//The 8th Youth Science and Technology Forum of CAAC, November 5, 2018, Jiangmen. (in Chinese)
[2] 韓雅慧, 王亞偉, 楊春信, 等. 直升機空中回收和投放貨物技術發展綜述[J]. 直升機技術, 2012(1): 63-67.
HAN Yahui, WANG Yawei, YANG Chunxin, et al. Review on Technology Development of Helicopter Mid-Air Retrieval and Delivery Goods[J]. Helicopter Technique, 2012(1): 63-67. (in Chinese)
[3] 宋旭民, 程文科, 彭勇, 等. 先進的精確空投系統[J]. 航天返回與遙感, 2004, 25(1): 6-10.
SONG Xumin, Cheng Wenke, PENG Yong, et al. Advanced Precision Airborne Delivery Systems[J]. Spacecraft Recovery & Remote Sensing, 2004, 25(1): 6-10. (in Chinese)
[4] 王鐵寧, 劉磊. 陸軍裝備物資無傘空投系統設計[J]. 裝甲兵工程學院學報, 2019, 33(2): 5-9.
WANG Tiening, LIU Lei. Design of the Army Equipments and Materials Airdrop without Parachute System[J].Journal of Academy of Armored Force Engineering, 2019, 33(2): 5-9. (in Chinese)
[5] 趙西友, 李彥平, 王靜偉, 等. 滾塑無傘空投儲水罐的設計與分析[J]. 中國塑料, 2019, 33(1): 111-115.
ZHAO Xiyou, LI Yanping, WANG Jingwei, et al. A Design and Analysis of Rotationally Molded Water Storage Tank in Free Drop[J]. China Plastics, 2019, 33(1): 111-115. (in Chinese)
[6] 杜振杰, 高萬玉, 孫曉軍, 等. 物資空投包裝緩沖設計與分析[J]. 包裝工程, 2016, 37(1): 29-32.
DU Zhenjie, GAO Wanyu, SUN Xiaojun, et al. Design and Analysis of Materials Airdrop Packaging Cushioning[J]. Packaging Engineering, 2016, 37(1): 29-32. (in Chinese)
[7] 易方, 孟浩龍. 新型空投橡膠油囊的設計[J]. 橡膠工業, 2018, 65(10): 1146-1149.
YI Fang, MENG Haolong. Design of a New Type of Airdrop Rubber Fuel Drum[J]. China Rubber Industry, 2018, 65(10): 1146-1149. (in Chinese)
[8] 王新春, 馬大為, 莊文許, 等. 某空投裝備在不同緩沖裝置下的沖擊響應分析[J]. 包裝工程, 2013, 34(13): 47-51.
WANG Xinchun, MA Dawei, ZHUANG Wenxu, et al. Impact Response Analysis of Airdrop Equipment with Different Buffer Device[J]. Packaging Engineering, 2013, 34(13): 47-51. (in Chinese)
[9] 許鑫. 沖壓式快速空投緩沖氣囊著陸過程仿真研究[J]. 機械工程與自動化, 2017(2): 59-60.
XU Xin. Simulation Research on Stamping Type Quick Airdrop Airbag Landing Process[J]. Mechanical Engineering & Automation, 2017(2): 59-60. (in Chinese)
[10] 周默涵, 狄長春, 楊玉良, 等. 圓柱筒式空投氣囊緩沖模擬[J]. 包裝工程, 2017, 38(17): 128-132.
ZHOU Mohan, DI Changchun, YANG Yuliang, et al. Simulation of Cushion Characteristic of Cylindrical Airdrop Airbag[J]. Packaging Engineering, 2017, 38(17): 128-132. (in Chinese)
[11] 張鋒, 王海濤. 歐美精確空投系統[J]. 兵工自動化, 2007(6): 103-104.
ZHANG Feng, WANG Haitao. European and American Precision Airdrop System[J]. Ordnance Industry Automation, 2007(6): 103-104. (in Chinese)
[12] 程澤民. 特殊條件下空投物資定位投放保障系統軟件研究[D]. 成都: 電子科技大學, 2014.
CHENG Zemin. Airdrops Positioning Under Special Conditions on the Security System Software Research[D]. Chengdu: University of Electronic Science and Technology of China, 2014. (in Chinese)
[13] 張紅英, 楊璐瑜, 李姝磊. 空降空投中的氣囊緩沖包裝技術[J]. 包裝工程, 2016, 37(17): 20-24.
ZHANG Hongying, YANG Luyu, LI Shulei. Airbag Cushion Packaging Technology in Airborne Airdrop[J]. Packaging Engineering, 2016, 37(17): 20-24. (in Chinese)
[14] 周宇, 李建陽, 邢偉, 等. 回收用緩沖氣囊關鍵技術研究進展[J]. 包裝工程, 2019, 40(1): 80-86.
ZHOU Yu, LI Jianyang, XING Wei, et al. Research Progress of Key Technologies of Airbag for Recovery[J]. Packaging Engineering, 2019, 40(1): 80-86. (in Chinese)
[15] 張紀平, 劉守君, 齊明思, 等. 沖壓式空投氣囊著陸緩沖性能仿真研究[J]. 包裝工程, 2015, 36(23): 83-87.
ZHANG Jiping, LIU Shoujun, QI Mingsi, et al. Simulation Research on the Landing Cushion Performance of Ram Airdrop Airbag[J]. Packaging Engineering, 2015, 36(23): 83-87. (in Chinese)
[16] 許鑫. 自動充氣式空投緩沖氣囊設計與分析[J]. 機械工程與自動化, 2015(6): 87-88.
XU Xin. Design and Analysis of Auto-inflatable Airdrop Cushion Airbag[J]. Mechanical Engineering & Automation, 2015(6): 87-88. (in Chinese)
[17] 劉守君, 齊明思, 黃宏勝, 等. 新型自充氣式著陸緩沖氣囊的理論分析與設計研究[J]. 包裝工程, 2015, 36(1): 107-110, 120.
LIU Shoujun, QI Mingsi, HUANG Hongsheng, et al. Theoretical Analysis and Design of a New Self-inflating Landing Cushion Airbag[J]. Packaging Engineering, 2015, 36(1): 107-110, 120. (in Chinese)
[18] SMITH T R, WARE J S, WILLEY C E, et al. Orion CEV Earth Landing Impact Attenuating Airbags-design Challenges and Application[C]//28th IEEE Aerospace Conference, March 3-10, 2007, Big Sky, Montana. Washington: AIAA, 2007.
[19] TUTT B, SANDY C, CORLISS J. Status of the Development of an Airbag Landing System for the Orion Crew Module[C]//20th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, May 4-7, 2009, Seattle, Washington. Washington: AIAA, 2009.
[20] 周清艷, 言金. 自落式緩沖氣囊仿真研究[J]. 航天返回與遙感, 2014, 35(2): 25-30.
ZHOU Qingyan, YAN Jin. Simulation of the Self-dropping Cushion Airbag[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(2): 25-30. (in Chinese)
[21] 黃偉, 竺梅芳, 廖航. 航天器著陸緩沖氣囊技術發展[J]. 航天返回與遙感, 2021, 42(2): 1-11.
HUANG Wei, ZHU Meifang, LIAO Hang. The Development of Spacecraft Landing Attenuation Airbag Technology[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(2): 1-11. (in Chinese)
[22] 趙西友, 王宏, 許濤, 等. 無傘空投緩沖包裝材料及技術研究[J]. 包裝工程, 2016, 37(3): 54-57, 84.
ZHAO Xiyou, WANG Hong, XU Tao, et al. Free Drop Buffering Packing Material and Technology[J]. Packaging Engineering, 2016, 37(3): 54-57, 84. (in Chinese)
[23] 劉勝祥, 王興業, 徐麗麗, 等. 蜂窩紙板在空投包裝中的應用[J]. 包裝工程, 2016, 37(17): 25-29.
LIU Shengxiang, WANG Xingye, XU Lili, et al. Application of Honeycomb Paperboard in the Packaging of Airdrop[J]. Packaging Engineering, 2016, 37(17): 25-29. (in Chinese)
[24] 王宏, 李松, 董新東. 基于ANSYSLS-DYNA的固體食品包裝袋空投著陸過程仿真[J]. 火力與指揮控制, 2016, 41(8): 177-180.
WANG Hong, LI Song, DONG Xindong. Study on Simulation of the Airdrop Landing Process of Solid Food Packaging Bag Based on ANSYSLS- DYNA[J]. Fire Control & Command Control, 2016, 41(8): 177-180. (in Chinese)
[25] 田亞飛. 退火工藝對鋁導體性能影響淺析[J]. 光纖與電纜及其應用技術, 2021(5): 35-36.
TIAN Yafei. Influence of Annealing Process on Properties of Aluminum Conductor[J]. Optical Fiber & Electric Cable and Their Applications, 2021(5): 35-36. (in Chinese)
Design of Low Altitude Free Drop Packaging and Verification of Its Self-stability and Cushioning Performance
JIA Shan1,2,3GAO Xiangyu1,2,3CHEN Jinbao*1,2,3WANG Yongbin1,3,4
(1 Academy of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China)(2 Key Laboratory of Mechanism for Deep Space Planet Surface Exploration, Ministry of Industry and Information Technology, Nanjing 211106, China)(3 Laboratory of Aerospace Entry, Descent and Landing Technology, Nanjing 211106, China)(4 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Parachute free airdrop has the advantages of short preparation time, rapid delivery, simple packaging, less affected by the weather, small landing dispersion and reusable. It has become a new airdrop mode of equipment and materials support in the future disaster relief work. Based on the application requirements, this paper presents a design scheme of low altitude parachute free and nondestructive airdrop packaging, and makes a comparative analysis on the influence of the single/double-layer design of wind resistance structure and the degree of partial centroid on the falling process. At the same time, the energy absorption effect of the pull rod structure in the process of touchdown buffer is simulated and analyzed. The design can realize the attitude self stabilization in the falling process based on the self expanding flexible wind resistance structure and the characteristics of partial center of mass. The landing accuracy of 50m airdrop is controlled at 0.1m, and the maximum overload in the landing buffer process is limited to less than 2 500n, which provides a solution for airdrop packaging for low altitude airdrop.
low altitude airdrop; parachute free airdrop; attitude self-stabilization; buffer energy absorption; recovery technology
V445.4
A
1009-8518(2022)02-0001-14
10.3969/j.issn.1009-8518.2022.02.001
賈山,男,1983年生,2016年獲東南大學機械電子工程專業博士學位,副教授。主要研究方向是深空星表探測機構技術、航天進入減速與著陸技術。E-mail:jiashanazz@nuaa.edu.cn。
陳金寶,男,1980年生,2008年獲南京航空航天大學飛行器設計專業博士學位,教授。主要研究方向是航天器結構與機構技術、航天器結構動力學、空間精密操控技術。E-mail:chenjbao@nuaa.edu.cn。
2021-12-13
國家重大科技專項工程;國家自然科學基金面上項目(52075242)
賈山, 高翔宇, 陳金寶, 等. 低空無傘無損空投包裝設計及其自穩和緩沖性能驗證[J]. 航天返回與遙感, 2022, 43(2): 1-14.
JIA Shan, GAO Xiangyu, CHEN Jinbao, et al. Design of Low Altitude Free Drop Packaging and Verification of Its Self-stability and Cushioning Performance[J]. Spacecraft Recovery & Remote Sensing, 2022, 43(2): 1-14. (in Chinese)
(編輯:龐冰)
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50