大型熱室內事故處理機器人的總體結構方案及其運動學研究
2022-05-10 13:17:22梁汝囡王廣開吳德慧
產業與科技論壇 2022年9期
關鍵詞:設計
□梁汝囡 彭 思 王廣開 吳德慧
當前,我國核工業事業正在進入高速發展期,乏燃料后處理工程是核工業中核燃料循環中的重要組成部分,熱室是乏燃料后處理工程中的核心包容性設備,其他重要的工藝處理設備一般都放在熱室內。雖然熱室內配備有遠距離操作工具,能夠處理日常的操作,但是對于意外事故的處理,目前缺乏適應性較強的設備。由于熱室內放射性水平較高,人員一般不能隨意進入,機器人是一種可編程和多功能的操作機,它是集成了機械、電子、控制、計算機、傳感器、人工智能等多種學科的先進技術的自動化裝備,從機器人的以上特點看出機器人就是一種優秀的可遠距離操作控制的機械設備,使用機器人來處理大型熱室中的事故和緊急事態是一個很好的解決方案。
一、機器人本體結構設計
機器人的本體結構由其承擔的任務所決定,大型熱室內的設備有很多類型,機械人的動作能力應盡量模擬人員進入的操作,所以要求機器人具備行走能力和靈活的動作能力。機器人本體結構的設計是整個機器人是否能夠滿足工作要求的關鍵。機器人本體結構的設計包括:機器人手臂的設計、機器人軀干的設計、機器人行走機構的設計、機器人探測系統的設計。機器人的本體將有兩條手臂,在工作時可以相互配合完成操作動作,類似于人體雙手的配合操作。機器人的軀干擬設計有旋轉和升降2個自由度,以增大機器人的操作范圍和應對可能發生的復雜工作情況。由于大型熱室內的空間較大,所以準備設計的機器人必須帶有行走系統,大型熱室內地面條件較為平整,一般是由整塊鋼板鋪設而成,所以擬設計的機器人行走系統采用輪式行走機構。發生事故時,熱室內的攝像系統可能會損壞,熱室內的輻照強度可能極高,而機器人的電子部件可能在吸收了大劑量輻照后發生損壞或失靈,有必要檢測機器人受到的累積輻照量,在劑量超標前停止工作退出屏熱室進行維護,所以擬設計帶有攝像系統和劑量檢測系統的機器人探測系統。
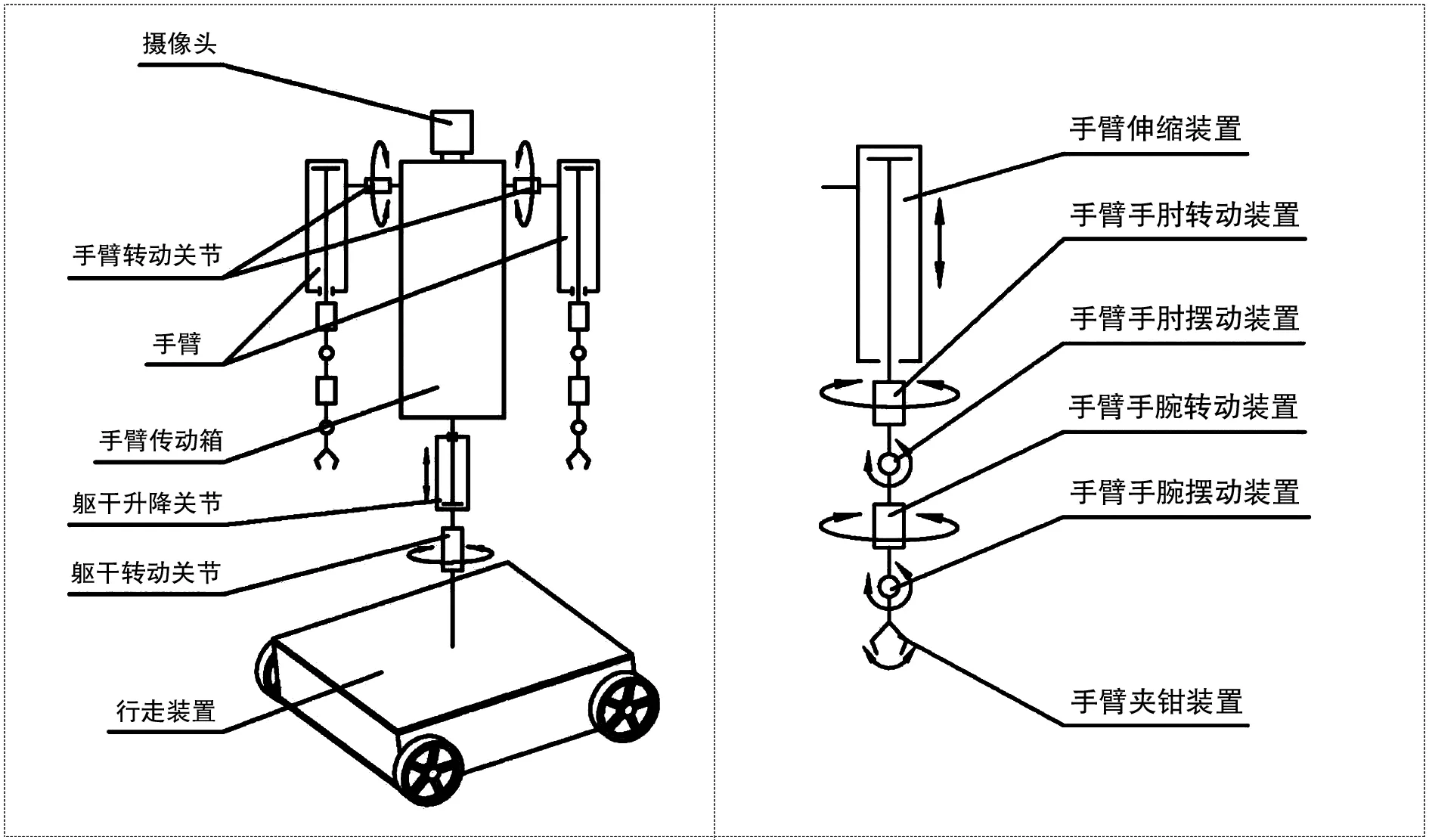
圖1 圖2
根據機器人所要具備的功能,本文所設計的機器人要具有多個關節、多個驅動器、多個自由度。機器人的設計首先就要合理的布置機器人的關節類型。
機器人具有許多不同的關節類型,如球形鉸鏈關節、線形關節、轉動關節、擺動關節、夾鉗關節等。其中球形鉸鏈關節相比其它種類的關節,其方向是最為靈活的,但在機械系統的實現上困難較大,一般使用電機驅動控制的機器人不采用這種關節。線形關節是一種可以往復做線形運動的機械裝置,一般利用氣缸、液壓缸、電動缸等線形驅動器來控制機器人上連桿的位置、運動速度和連桿的驅動力。轉動關節和擺動關節都是可以圍繞關節安裝軸做轉動的機械裝置,一般利用電機來控制機器人上連桿的轉動角度、轉動速度和連桿的驅動力。夾鉗關節是一種模仿人手握緊動作的機械裝置,利用氣缸或電機都可以控制握緊的力度和握緊的角度。
基于以上分析,本文所設計的機器人采用線性關節、轉動關節、擺動關節、夾鉗關機組合而成的機械系統,其結構簡圖如圖1所示,軀干設置有轉動關節和線形關節,轉動關節使機器人軀干轉動,線形關節使機器人軀干升降,以增大機器人的操作范圍。機器人軀干上由機器人手臂的傳動箱、機器人的攝像機組成,機器人的手臂安裝在軀干上,安裝有兩個轉動關節驅動整個手臂的轉動另機器人手臂采用與人體手臂相類似的肘部、腕部和手指,腕部和肘部各包括一套轉動關節和擺動關節,機器人的手指采用夾鉗關節,如圖2機器人手臂關節簡圖所示,將以上所有的機構都安裝在底座上,底座內部設有行走裝置。
二、機器人的動力學分析
機器人是一個復雜的機電一體化系統。這個系統的運動學特性和動力學特性都是其最重要的特性。機器人的運動學特性和動力學特性都直接決定了機器人控制系統的設計。
機器人可以看作是一個開鏈的多連桿機構,始端即為機器人的基座,可稱為基桿,末端為機器人的手部,相鄰的連桿間用一個旋轉關節或伸縮關節連接在一起,機器人的運動學就是研究機器人各連桿之間的位置關系。每一連桿件建立構件坐標系的方法是由Denavit和Hartenberg于1955年提出的,簡稱為D-H方法[1]。
本文所述機器人可以同樣看作是由一系列連桿機構通過關節連接起來的,通過各機構連桿的相對位置變化可使機器人手部達到不同的空間位置,而在每一個連桿機構中固定一個構件坐標系,然后用齊次變換描述這些構件坐標系之間的相對位置,就建立了機器人運動學方程。機器人的運動學方程是進行機器人位移分析的基本方程,也稱為機器人的位姿方程,運動學方程的建立和求解是機器人機構分析的基本問題之一。下面將分別推倒出本文所設計的機器人末端連桿相對于固定參考系的位置姿態矩陣。
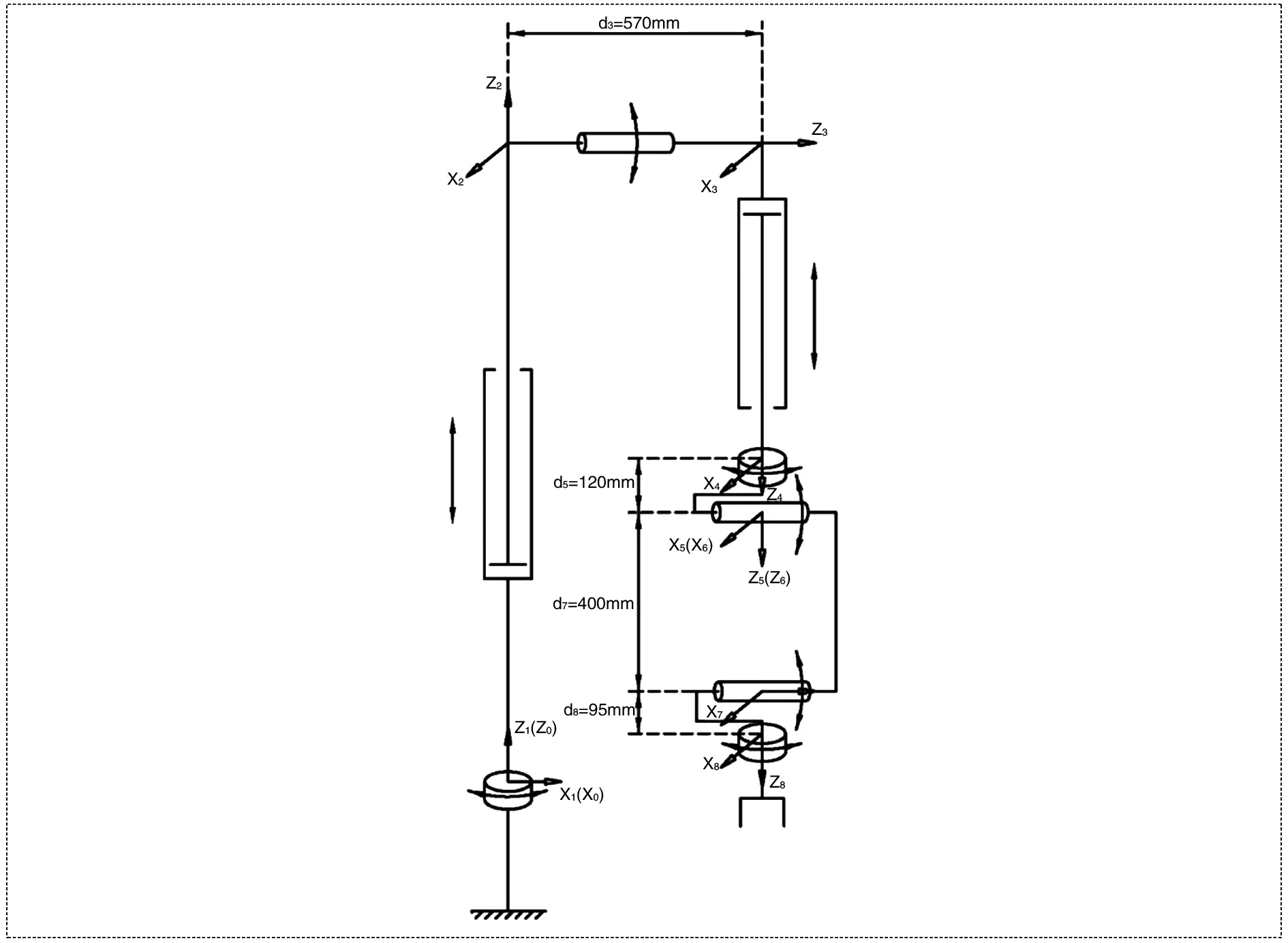
圖3
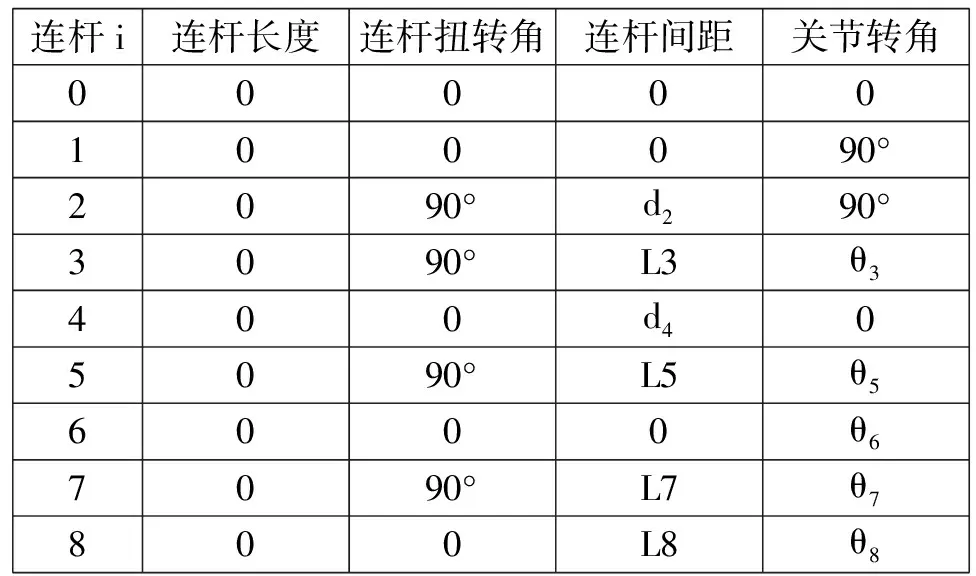
表1 機器人連桿參數
如圖3所示,根據上文所述的機器人結構,建立機器人連桿坐標系,各連桿的具體參數見表1。
根據表1中機器人連桿的參數,求出各相鄰連桿間的變換矩陣,連桿1變換到連桿0的齊次變換矩陣:
連桿2變換到連桿1的齊次變換矩陣:
連桿3變換到連桿2的齊次變換矩陣:
連桿4變換到連桿3的齊次變換矩陣:
連桿5變換到連桿4的齊次變換矩陣:
連桿6變換到連桿5的齊次變換矩陣:
連桿7變換到連桿6的齊次變換矩陣:
連桿8變換到連桿7的齊次變換矩陣:
連桿8變換至連桿0的齊次變換矩陣,即機器人末端連桿相對于固定參考系的位置姿態矩陣:
將sinθi簡記為si,將cosθi簡記為ci,求得
r11=c8[c7[c6(c1s5-s1c3c5)-s1s3s6]-s7[s6(c1s5-s1c3c5)+s1s3c6]]-s8(c1c5+s1c3c5)
r12=-s8[c7[c6(c1s5-s1c3c5)-s1s3s6]-s7[s6(c1s5-s1c3c5)+s1s3c6]]-c8(c1c5-s1c3s5)
r13=c7[s6(c1s5-s1c3c5)+s1s3c6]+s7[c6(c1s5-c3c5s1)-s1s3s6]
r21=c8[c7[c6(s1s5+c1c3c5)+c1s3s6]-s7[s6(s1s5+c1c3c5)-c1s3c6]]-s8(s1c5-c1c3s5)
r22=-s8[c7[c6(s1s5+c1c3c5)+c1s3s6]-s7[s6(s1s5+c1c3c5)-c1s3c6]]-c8(s1c5-c1c3s5)
r23=c7[s6(s1s5+c1c3c5)-c1s3s6]+s7[c6(s1s5+c1c3c5)+c1s3s6]
r31=s3s5s8-c8[c7(c3s6-s3c5c6)+s7(c3c6+s3c5s6)]
r32=s3s5c8+s8[c7(c3s6-s3c5c6)+s7(c3c6+s3c5s6)]
r33=c7(c3c6+s3c5s6)-s7(c3s6-s3c5c6)
qx=L8[c7[s6(c1s5-s1c3c5)+s1s3c6]+s7[c6(c1s5-s1c3c5)-s1s3s6]]-L7(c1c5+s1c3s5)+L3c1-d4s1s3-L5s1s3
qy=L8[c7[s6(s1s5+c1c3c5)-c1s3c6]+s7[c6(s1s5+c1c3c5)+c1s3s6]]-L7(s1c5+c1c3s5)+L3s1-d4c1s3-L5c1s3
qz=d2+L8[c7(c3c6+s3c5s6)-s7(c3s6-s3c5c6)]-d4c3-L5c3+L7s3s5
三、結語
本文提出了一種用于大型熱室內事故處理機器人的總體結構方案,為后續機器人具體機械結構的設計指出方向。D-H方法描述本文所設計機器人的各連桿之間的相對位置與姿態,繼而求出了本文所設計的機器人各連桿間的相對運動方程,為以后機器人控制系統研究奠定了良好的基礎,對于機器人的制造和機器人性能的提高具有重要意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
