廢棄堿金屬容器搬運機器人的方案設計及關鍵技術研究
2022-05-10 13:17:20王榮東姚澤文韓新梅常一狄
產業與科技論壇 2022年9期
□王榮東 姚澤文 謝 淳 樸 君 韓新梅 常一狄
近年來堿金屬在化工、核電、實驗室等領域運用愈加廣泛,退役待處理的廢棄堿金屬容器也在增多,這些容器中存在堿金屬殘留或性質不明的堿金屬、化合物等,處理不當會引發嚴重后果。目前采取的方法是集中存儲集中處理,而在運往集中存儲點的過程主要為人工搬運或車載搬運,都必須有人員進行操作,極有可能發生因堿金屬泄漏燃燒或者爆炸造成人員損傷。利用專屬機器人來遠程或自動進行這類高風險任務,能夠避免人員遭受職業傷害的風險,極大程度上緩解操縱人員進行高危任務時的心理壓力[2]。除此之外,廢棄堿金屬搬運機器人識別、抓取、搬運一體化功能使得工作效率大幅提升。本文設計研發了一種用于搬運廢棄堿金屬容器的專用搬運機器人,對該專用機器人所需達到的技術要求和關鍵難點問題進行了相關分析和探討。該專用機器人可以全自動完成廢棄堿金屬存儲罐搬運任務,也可在人機交互方式下遠程遙控工作,用于代替人工執行廢棄堿金屬容器搬運任務。
一、搬運機器人技術要求
本設計旨在根據非放射性廢棄堿金屬臺架拆除、搬運與存儲的需求,研制一款移動機器人,在廢棄堿金屬容器需要報廢時,遙控搬運機器人完成廢棄堿金屬容器的夾取、搬運和固定任務。為了完成搬運任務,該專用機器人需滿足以下要求:一是具備較高的行駛穩定性、具有一定跨越障礙的能力、爬坡能力以及良好的可操作性,以滿足防止堿金屬容器液態內容物溢流的要求;二是具有靈活穩固的機械臂系統,并且能夠以遠程控制的方式實現廢棄堿金屬容器的抓取操作,以實現堿金屬容器的穩固抓取;三是具備站點識別能力、安全避障能力以及自主導航能力,以確保專用機器人運輸過程的可靠運行。
二、搬運機器人方案的設計
(一)總體方案。機器人整體外觀如圖1所示。整機由輪式底盤、機體外殼、臂及夾爪及其他配套動力及激光雷達等部件構成,底盤兩輪中心距為1,600mm,臂提起罐體動力由電機減速器配套使用提供,車體前后均布有激光雷達,斜對角放置,保證無死角,車體四周均布有超聲波傳感器,用于測距,為了保證無死角,每間隔20mm設置一個超聲波傳感器。臂上安裝有紅外測距傳感器,用于測量車體距離罐體距離,測量抓取罐體位置。
四輪驅動的輪式底盤配合激光導航、深度視覺實現機器人自動尋路、自動導航、自動避障,機械臂執行夾取、固定任務。輪式機器人整體設計尺寸預估2,398*1,969*850mm,整機自身重量為350kg,為了滿足不同工況下專用機器人的結構強度需求,本文設計的專用機器人采用不銹鋼、鋁合金作為整體車身的材料,平地有效載荷達到500kg,16度坡面(滿電工況下),滿負載行駛速度10km/h。
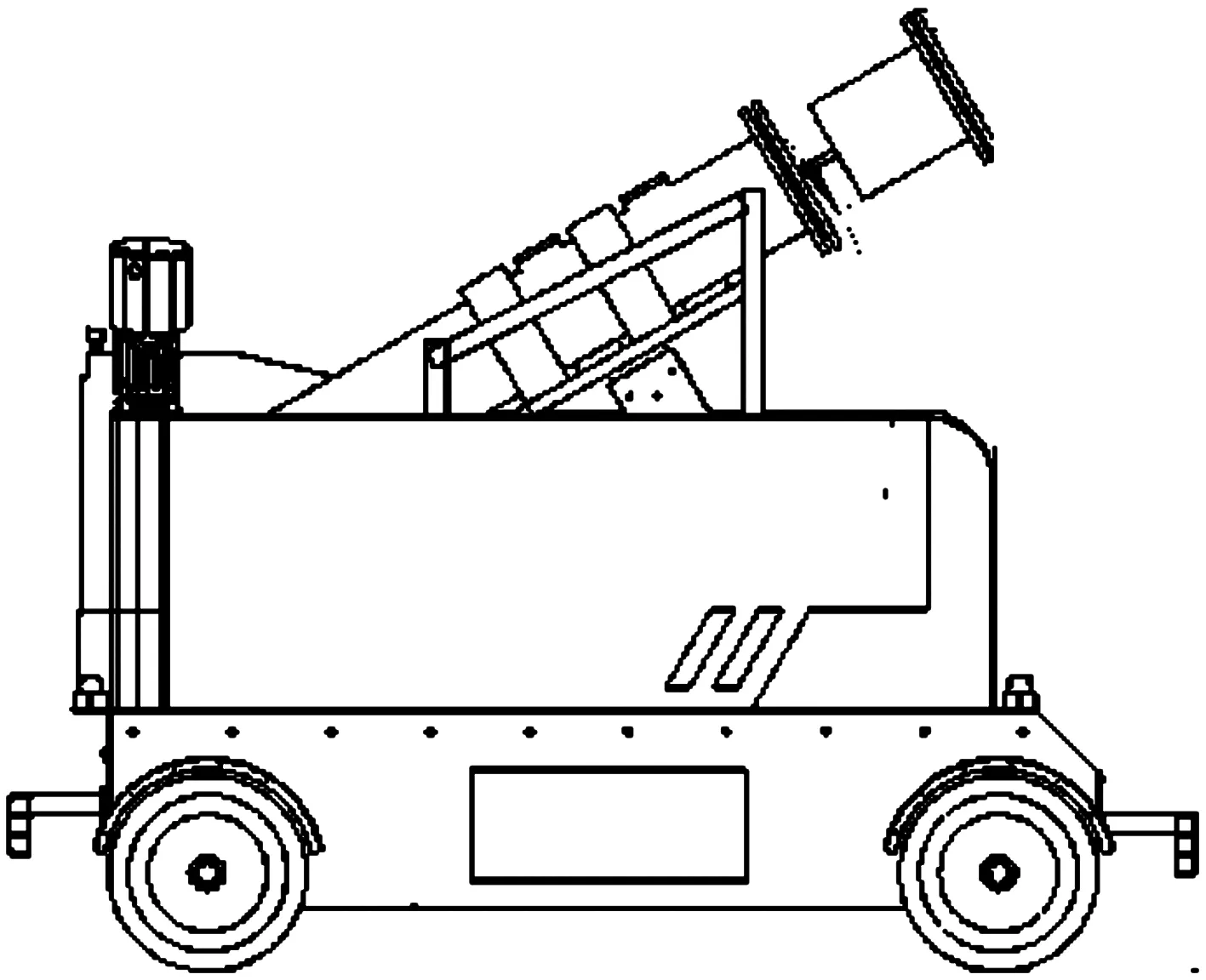
圖1 機器人原型示意圖
(二)系統組成。
1.行走機構。四輪式行走機構因其良好的結構穩定性、較高的運動速度以及較高的搬運效率,廣泛應用于各類搬運裝置當中,因此該專用機器人采用四輪式的輪式行走機構。
2.任務模塊。任務模塊由機械臂和抓夾兩部分組成。機械臂上升、下降執行上下料動作,抓夾安裝在機械臂前端,隨機械臂上升下降,夾爪張開閉合完成容器的夾取固定動作。另外,設計的專用機器人上還預留有相應的機械接口、電氣接口等,后續可根據實際工作需求添加其他相應任務模塊。
3.無線控制系統。廢棄堿金屬容器搬運機器人的無線控制(遙控端)是采用上位機和下位機方式實現。其中上位機和下位機分別位于遠程操作裝置和搬運機器人內部。前者通過無線通訊的方式向后者發送指令和接受信息。控制算法的運算、收集信息等在下位機中進行。
(三)工作流程。人工將廢棄堿金屬存儲罐轉運小車推至未拆卸罐體附近,卡住罐體,進行拆卸,拆卸后人工將小車放平,推至指定地點,專用機器人開至指定地點,電機驅動臂向下旋轉一定角度,機器人向前移動,罐體相對機器人向后移動,臂底端焊有L型板,板上有深槽,在深槽中裝入紅外測距傳感器,設置距離,檢測出罐體抓取位置后,夾爪開至一定角度,抓住被運輸罐體,電機驅動臂向后翻轉,翻轉一定角度后,使罐體剛好卡在V型支架上,保證行駛過程中的運輸罐體的穩定性。翻轉完成后,通過控制柜控制運輸車行駛至指定罐體存放庫。專用機器人的抓取過程流程圖如圖2所示。
三、關鍵技術及解決方案
(一)高機動行走機構設計。輪式行走機構是國內外移動機器人采用最多的行走機構形式,由于輪式行走機構的移動機器人具有運動速度快、效率高等優點,因此在本項目中移動機器人采用四輪式的輪式行走機構。
機器人驅動力,即地面對車輛輪的反作用力,其計算為:
Ft=Ff+Fw+Fi+Fj
(1)
Ttqigi0ηt/r=Gfcosα+CAu2/21.15+Gsinα+δmdu/dt
(2)

圖2 抓取過程流程圖
由上述機器人行駛阻力公式,可計算出驅動力為4352.285N。根據機器人最高行駛速度確定的機器人總功率為:
(3)
計算得到P1的值為0.313Kw。
根據爬坡性能確定最大功率:
(4)
代入數據,計算得到的值為2.259Kw。
根據加速性確定最大功率:
(5)
計算得P3為1.0kW。
綜上,機器人的電動功率應能同時滿足機器人對最高行駛速度、加速特性以及爬坡能力的要求,所以機器人最大功率:Pemax=max{P1,P2,P3},則Pemax=2.259kW。
輪式底盤采用永磁同步輪轂電機,每個驅動車輪安裝一個輪轂電機,所以單個電機的最大功率0.565kW。電機具有較大的過載能力,過載系數λ在2左右。
單個電機額定功率:Pe=Pemax/λ式中λ為電機的過載系數,一般取2~3,本次計算中取2[6]。由上述計算過程得出單個輪轂電機所需最大電機功率為Pemax=1.13kW。
電機轉速與機器人行駛速度之間的關系如下:
n=(V·i·60)/2πr·3.6
(6)
機器人空載時最高行駛速度Umax=15km/h帶入,得車輪最高轉速約為59rpm,根據減速比1∶25可得到輪轂電機轉速為1,474rpm;機器人滿載時行駛速度為10km/h,則電機的額定轉速約為59rpm,得到輪轂電機轉速約為1,000rpm。綜上,應選用額定轉速為1,500rpm的輪轂電機。
(二)機械臂及夾持機構設計。機械臂采用自主開發的單臂機械系統,將其作為廢棄堿金屬搬運機器人抓取、釋放和固定部件,末端夾持機構的最大負載可達300kg。夾持機構和機械臂如圖3所示。其采用開放式軟件架構、留有二次開發的控制接口,相比同類型工業機器人更易于編程。

圖3 機器人抓手模型圖
抓手由夾爪及爪尖構成,外形尺寸為525*416*530mm,電機驅動夾爪向兩側移動,實現夾爪張開閉合,從而夾取罐體。
抓手電機采用常閉式制動電機,即斷電時自動閉合,實現自鎖功能,當抓手因意外情況失電時,抓手自鎖保持當前狀態,防止因抓手松動造成罐體脫落引發危險。
(三)自動導航系統設計。本項目專用機器人導航系統的導航控制器采用激光雷達進行定位和地圖構建(SLAM),通過采用深度視覺相機進行三維立體躲避障礙物,最后再采用超聲波技術輔助激光雷達和深度視覺相機實現監測盲點的規避。該導航控制器支持自然環境下的導航,也支持非自然環境(如反光板和特定標志物的識別),控制器兼容兩種導航方式多種選擇,使專用機器人適用各種生產場所。在不明確周圍環境的情況下,該專用機器人導航控制器可以通過配置的內部傳器(如IMU、編碼器等)和機器人結構外圍感應器(如深度視覺相機、激光雷達等)來進行自身所處位置的定位,并通過外圍感應器獲取的外部環境信息增量式的進行周圍環境信息地圖的構建,導航流程框圖如圖4所示。

圖4 導航流程框圖
在實際運行過程中,該專用機器人利用內部傳感器中的IMU計算機器人的運行里程信息,通過編碼器進行編譯再結合機器人的運動模型計算分析出其模糊位姿,接著利用獲取的激光傳感器數據和深度視覺相機數據對其初步計算的位姿進行精確修正,最終得到機器人的精確位置及姿勢定位,在此基礎上,再將采集的環境激光數據添加至構建的柵格地圖中,如此反復分析計算,最終完成整個實際場景地圖的繪制和構建。
在完成上述實際場景地圖的構建后,在其基礎上進行專用機器人的位置定位和路徑規劃。專用機器人在實際的運行操作過程中,通過實際運行時采集的激光傳感器數據和里程信息與構建的場景地圖進行匹配分析,不斷地實時獲取專用機器人在地圖中精確位置和姿勢信息,并根據目前所處位置與目的地的情況進行最優路徑規劃(動態路線或者固定路線,且每次的路線都略微不同[8]),將規劃的最優路徑控制指令再次反饋給機器人,以此完成機器人的自主導航行駛。
四、結語
本文研究了一種適用于非放射性廢棄堿金屬臺架拆除、搬運的專用機器人,文中首先進行了專用機器人的功能需求及結構需求分析,并在此基礎上開展了專用機器人的總體方案設計,闡述了該專用機器人的具體系統組成,并針對其自動行駛的需求以及安全可靠性的要求進行了詳細分析,重點針對該專用機器人的移動底盤系統、自主導航系統等核心部件開展了深入研究,并提出了相應的解決辦法。目前,該專用機器人已完成了整體系統的整合和調試試運行工作,并驗證了其自動行駛、自動搬運等功能。本項目的研究成果為堿金屬安全能力提升提供了技術保障,其技術和思想也可推廣應用于我國快堆冷卻劑安全處理技術領域。
