基于MSP430單片機的智能導(dǎo)盲小車設(shè)計
2022-05-10 05:25:16羅文杰郭夢婷謝雨杉李桂梅
電腦知識與技術(shù) 2022年9期
羅文杰 郭夢婷 謝雨杉 李桂梅

摘要:本文簡要介紹了智能導(dǎo)盲小車的硬件設(shè)計和軟件設(shè)計。以MSP430為主控芯片,通過光電傳感器進行智能循跡,采用黑色循跡路線為規(guī)定路線,模擬現(xiàn)實生活中的盲道等固定路徑,并具有避障及語音播報功能。經(jīng)過安裝調(diào)試、試驗檢測,能實現(xiàn)智能導(dǎo)盲,具有良好的人機交互性。
關(guān)鍵詞:智能小車;導(dǎo)盲;循跡;避障;語音播報
中圖分類號:TP271? ? ?文獻標(biāo)識碼:A
文章編號:1009-3044(2022)09-0060-03
據(jù)統(tǒng)計,中國是世界上盲人最多的國家,同時每年我國新增45萬左右盲人。其中有百分之三十的視障人士不敢踏出家門一步。為了解決盲人的生活和工作問題,提高盲人的生活質(zhì)量,擴大了盲人的活動范圍。筆者設(shè)計了智能導(dǎo)盲小車。
1硬件設(shè)計
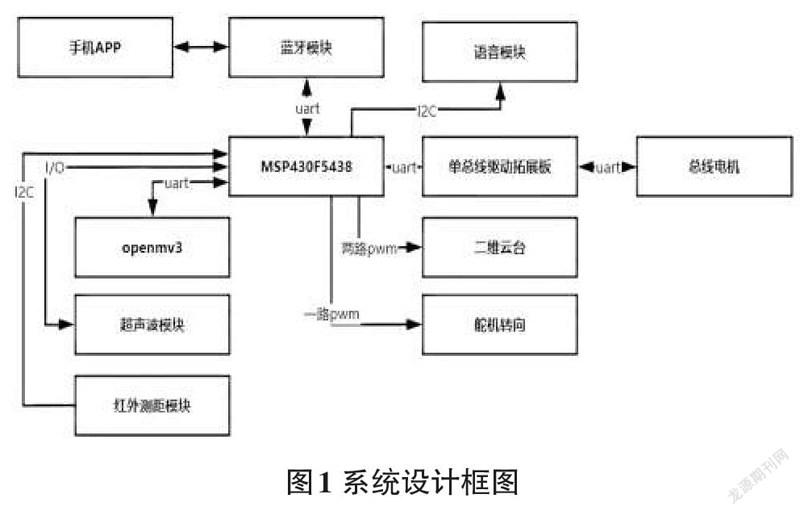
本系統(tǒng)主要由MSP430F5438單片機、超聲波測距模塊、紅外循跡模塊、總線電機、舵機、語音模塊、藍(lán)牙模塊組成。硬件系統(tǒng)設(shè)計框圖如圖1所示。
1.1單片機模塊
本設(shè)計選用MSP430系列單片機具有處理能力強、運算速度快、超低功耗、片內(nèi)資源豐富等特點。比較適合進行各種數(shù)據(jù)處理、分析、綜合并加以控制,也適合此項目的需要。
1.2驅(qū)動模塊
采用L298N驅(qū)動芯片。由單片機發(fā)出控制信號控制電機轉(zhuǎn)動方向,驅(qū)動模塊一旦收到單片機通過超聲波模塊發(fā)出的中斷信號,開始驅(qū)動電機轉(zhuǎn)動實現(xiàn)左轉(zhuǎn)、右轉(zhuǎn)、前進、越障等功能。
1.3紅外循跡模塊
智能循跡小車采集所設(shè)定的黑色路徑位置的信號,通過對所設(shè)置的黑色路徑的識別,產(chǎn)生高、低電平信號,依據(jù)檢測到黑線光電二極管返回高電平信號,未檢測到黑線,返回低電平信號。把信號傳遞到MSP430F5438。MSP430F5438根據(jù)獲取的信號發(fā)出相應(yīng)的控制指令傳遞給電機驅(qū)動,并通過電機驅(qū)動模塊控制直流電動機的轉(zhuǎn)動狀態(tài),經(jīng)過一系列算法判斷檢測,從而完成自動循跡過程。
1.4測距模塊
小車采用Y401超聲波測距模塊作為測距裝置。Y401超聲波測距模塊可實現(xiàn)4米以內(nèi)的非接觸測距功能,測量盲區(qū)小,靜態(tài)功耗低于2mA,低功耗,自帶溫度傳感器對測距結(jié)果進行校正,測量結(jié)果精確,使用GPIO模式對ANCHO和TRIG操作,內(nèi)帶看門狗,工作穩(wěn)定可靠。
1.5藍(lán)牙模塊
小車采用HC-05藍(lán)牙無線通信。可通過向模塊發(fā)送AT工作指令對模塊的控制參數(shù)進行設(shè)定和下達(dá)控制指令,在自動連接工作模式下,模塊又有三種工作模式,分別為主機(master),從機(slave)和回環(huán)(lookback)三種工作角色。選擇從機模式,使小車變?yōu)閺臋C藍(lán)牙,手機做主機藍(lán)牙,完成無線雙向通信控制小車做出相應(yīng)動作。
1.6語音模塊
小車采用DY-SV17F外接5W喇叭,通過上下拉電阻的方式,選擇驅(qū)動方式,采用串口方式對語音播放進行控制。
2 軟件設(shè)計
2.1自動控制智能算法
本數(shù)據(jù)編寫PID函數(shù)解決返回實時轉(zhuǎn)速精準(zhǔn),控制實時轉(zhuǎn)速轉(zhuǎn)向,達(dá)到啟動迅速,轉(zhuǎn)動圈數(shù)量化精準(zhǔn)。
由姿態(tài)傳感器實時更新陀螺儀數(shù)據(jù)編寫兩次pid函數(shù),控制電機轉(zhuǎn)向轉(zhuǎn)速以及舵機轉(zhuǎn)動達(dá)到角度精準(zhǔn)控制,保證了前進的角度直線行駛。在轉(zhuǎn)彎過程中,給定需要轉(zhuǎn)動的角度,迅速做出反應(yīng),達(dá)到精準(zhǔn)可調(diào)轉(zhuǎn)動角度,如圖2所示。
2.2紅外循跡模塊工作流程
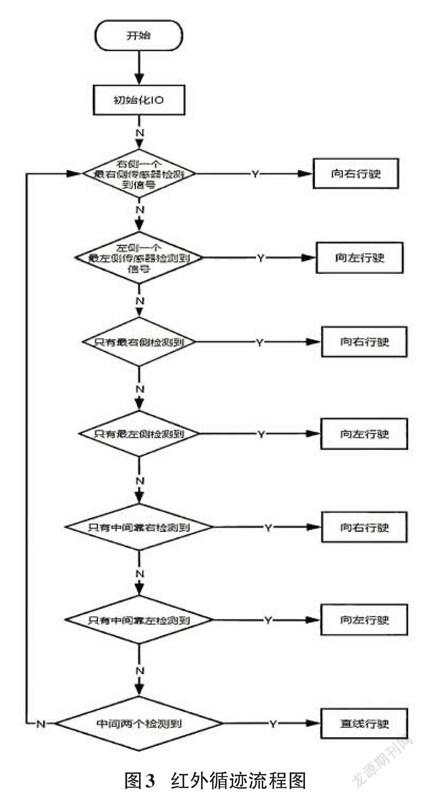
本模塊設(shè)計的主要作用是利用光電二極管對于不同色差吸收程度不同,幫助小車規(guī)劃路線。通過設(shè)置紅外傳感器距離遠(yuǎn)近,優(yōu)化小車的運行。本設(shè)計利用四個光電傳感器,探測前方地面反射光的強度,最終得到前方路面的具體情況,將探測出的數(shù)據(jù)輸出為不同的電平信號,確定轉(zhuǎn)向,進行循跡。
本模塊首先設(shè)置P2.1,P2.2,P2.3,P7.3為輸入I/O口,順序依次從左至右。左側(cè)兩個光電傳感器其中一個檢測到黑線,最右邊也檢測到黑線,小車向右轉(zhuǎn)行駛;否則,若右側(cè)兩個光電傳感器其中一個檢測到黑線,最左側(cè)也檢測到黑線,小車向左轉(zhuǎn);否則,若只有最右側(cè)檢測到黑線,小車向右轉(zhuǎn)行駛;否則,若只有最左側(cè)光電傳感器檢測到軌跡,小車向左轉(zhuǎn)行駛;否則,當(dāng)只有右側(cè)第二位光電傳感器檢測到軌跡時,小車向左微轉(zhuǎn);否則,當(dāng)只有左側(cè)第二位光電傳感器檢測到軌跡時,小車向右微轉(zhuǎn);當(dāng)小車中間兩個光電傳感器同時檢測到黑線時(兩個指示燈亮),小車保持直行,如圖3所示。
2.3 超聲避障工作流程
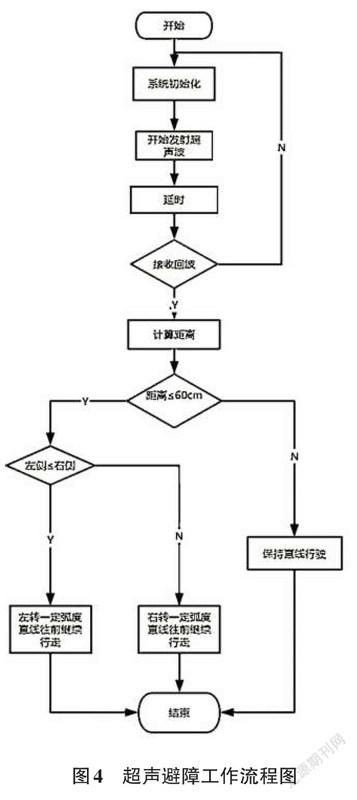
將超聲波模塊固定在轉(zhuǎn)向舵機的正上方,舵機轉(zhuǎn)動超聲波探頭,測量前方距離。超聲波發(fā)出信號,定時器清零,定時器啟動,收到回波后關(guān)閉定時器,通過定時器測出距離,若距離大于60 cm,直線行走,小于60cm,再通過判斷左右側(cè)距離,決定轉(zhuǎn)向,再繼續(xù)直線前行。避障過程中的轉(zhuǎn)向帶上PID反饋調(diào)節(jié),結(jié)合定時器中斷,達(dá)到指定角度轉(zhuǎn)向,如圖4所示。
2.4語音檢測過程
首先,將數(shù)據(jù)信號從單片機MSP430F5438通過固定的串口協(xié)議發(fā)送給語音模塊,語音模塊譯碼聲音信號后,通過揚聲器轉(zhuǎn)換高低電平輸出聲音信息,完成語音控制和語音提醒。
自行設(shè)定障礙物檢測距離,當(dāng)小車檢測在這個距離之內(nèi)存在障礙物時,小車的控制系統(tǒng)會發(fā)出提前錄制好的語音播報,如“前方有障礙物,請注意避讓”“請左轉(zhuǎn)”等。
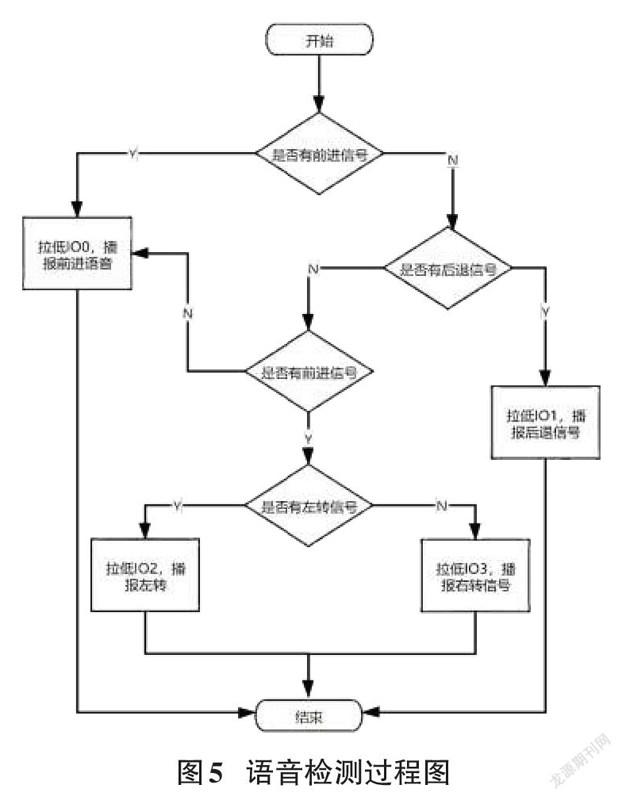
檢測是否存在前進信號,若存在,則對應(yīng)I/O變?yōu)榈碗娖剑笄斑M語音,不存在前進信號,再判斷是否存在后退信號,存在則后退,不存在后退信號,再判斷是否存在轉(zhuǎn)向信號,再判斷是否左轉(zhuǎn),若有左轉(zhuǎn)信號,再根據(jù)微調(diào)信號播報語音,右轉(zhuǎn)信號同理,如圖5所示。
3測試方案與測試結(jié)果
3.1測試方案
(1)硬件測試:測試光電二極管輸出距離調(diào)整至合適距離,超聲波回傳距離參數(shù)是否正常等。
(2)軟件仿真測試:邏輯性可行,編譯器無報錯信息,時鐘配置正常。
(3)硬件軟件聯(lián)調(diào):通過編寫程序連接硬件,觀察單片機寄存器內(nèi)部參數(shù)是否正常并反復(fù)測試濾波參數(shù)。
3.2 測試條件與儀器
(1)使用電膠自制跑道;
(2)使用仿真器觀測設(shè)置變量參數(shù)變化;
(3)使用示波器觀測所調(diào)PWM波;
(4)使用萬用電表測量電路各處電壓通斷等;
(5)熱熔槍、鑷子、老虎鉗等。
3.3 測試結(jié)果及分析
設(shè)計安裝的智能導(dǎo)盲小車,自動避障功能良好,可靠性99.8%,在預(yù)設(shè)的軌道上,超聲波測得距離數(shù)據(jù)對實時路況進行判斷,小車的各種姿態(tài)配合控制成功避障,準(zhǔn)確率99.5%,語音識別率100%。
4結(jié)束語
本文設(shè)計的智能導(dǎo)盲小車,成功實現(xiàn)小車的自動避障循跡功能, 采用超聲波傳感器結(jié)合一個轉(zhuǎn)向舵機測距, 在設(shè)置的軌道上能通過超聲波傳感器所測距離數(shù)據(jù)對四周平面距離進行判斷。小車的姿態(tài)控制精準(zhǔn)精確、穩(wěn)定性強。語音識別為用戶提供了輕松、方便的人機交互界面,使盲人從家里能方便到達(dá)小區(qū)的辦公室、餐廳、超市、娛樂場所等,達(dá)到預(yù)期目標(biāo)。
參考文獻:
[1] 閆博揚,李玉衡,姚磊.基于Arduino開發(fā)板的自動循跡避障智能車控制系統(tǒng)設(shè)計[J].軟件,2020,41(7):57-60.
[2] 李玉衡,李雨佳,饒啟明,等.基于權(quán)重PID和激光測距斯特林自控車設(shè)計[J].電子測量技術(shù),2020,43(13):1-6.
[3] 張坤.基于ARM單片機的智能小車循跡避障研究設(shè)計[D].濟南:齊魯工業(yè)大學(xué),2020.
[4] 毛艷嶺,艾月,趙明君.基于語音識別的智能車系統(tǒng)[J].電子技術(shù)與軟件工程,2020(7):113-115.
[5] 陳文澄,張輝,張晉滔.一種多功能循跡避障智能小車的研制[J].科技創(chuàng)新與應(yīng)用,2019(4):32-34.
[6] 劉潔.無線循跡避障智能小車的設(shè)計[J].工業(yè)控制計算機,2018,31(9):163-164.
[7] 李帥男.基于STM32的循跡避障智能小車的設(shè)計[J].數(shù)字技術(shù)與應(yīng)用,2018,36(8):163-164.
[8] Yao P,Wang H L,Su Z K.Real-time path planning of unmanned aerial vehicle for target tracking and obstacle avoidance in complex dynamic environment[J].Aerospace Science and Technology,2015,47:269-279.
【通聯(lián)編輯:唐一東】
