多傳感器融合的自動泊車建圖定位研究
2022-05-07 17:37:02安林芳宋圓圓
機電信息 2022年9期
安林芳 宋圓圓


摘 要:自動泊車系統中的建圖定位不僅負責對車輛周圍信息進行感知和建模,還包括對車輛自身進行定位和跟蹤反饋。建圖定位為后續自動泊車的路徑規劃、決策控制提供依據,是整個泊車系統的根本基礎,也是決定車輛自動泊車質量的直接因素。鑒于此,總結了近年來自動泊車系統建圖定位方法的相關研究成果,對涉及的各類技術進行了介紹和分析,推斷出今后關注的重點將是利用各類傳感器、算法的融合,實現對泊車環境更加客觀的清晰描述,控制算法將更加高效精準且穩定。
關鍵詞:自動泊車;建圖定位;路徑規劃;決策控制;自動駕駛
中圖分類號:U463.6;TN967 ?文獻標志碼:A ?文章編號:1671-0797(2022)09-0021-03
DOI:10.19514/j.cnki.cn32-1628/tm.2022.09.006
0 ? ?引言
自動泊車系統作為自動駕駛技術中不可缺少的一部分,正越來越多地走進人們的生活,該功能的成功運用能夠有效降低用戶泊車難度,解決新手駕駛員泊車難問題。建圖定位模塊是自動泊車功能順利實現的基礎,主要任務是為泊車全過程提供準確、實時定位的地圖信息,保證泊車安全順利進行。目前國內并不是所有車型都配備了自動泊車系統,自動泊車系統的廣泛應用依賴其基礎技術的發展,因此,建圖定位技術研究能夠對國產汽車的泊車系統應用和發展起到積極的推動、促進作用。
1 ? ?自動泊車系統
自動泊車系統首先利用車輛配置的各種傳感器獲取車輛周圍的環境信息,在車位掃描完成后向人機交互或控制決策模塊輸出可停車位;然后根據建立的地圖和定位信息,系統規劃出一條最優的泊車路徑并完成泊車過程[1]。在此過程中,通過智能控制解決駕駛員“我在哪” “我要去哪”以及“我怎么去”這3個重要問題[2],幫助駕駛員快速、安全地完成泊車操作。
為保證車輛能夠順利完成整個泊車入庫過程,自動泊車控制系統可分為建圖定位、路徑規劃和控制決策3個模塊,如圖1所示。駕駛員通過操作車輛的人機交互界面開啟自動泊車功能,車輛開始低速行駛,這個過程中建圖定位模塊利用超聲波傳感器、攝像頭、車身傳感器等進行周圍環境信息的采集,掃描和識別可停車位,同時保證對車輛本身的實時定位和跟蹤;路徑規劃模塊根據建圖定位模塊輸出的地圖和定位信息進行車輛泊車路線的規劃;控制決策模塊主要按照規劃路徑和實時地圖對車輛進行執行控制,通過EPS、擋位、車速等控制最終實現自動泊車。
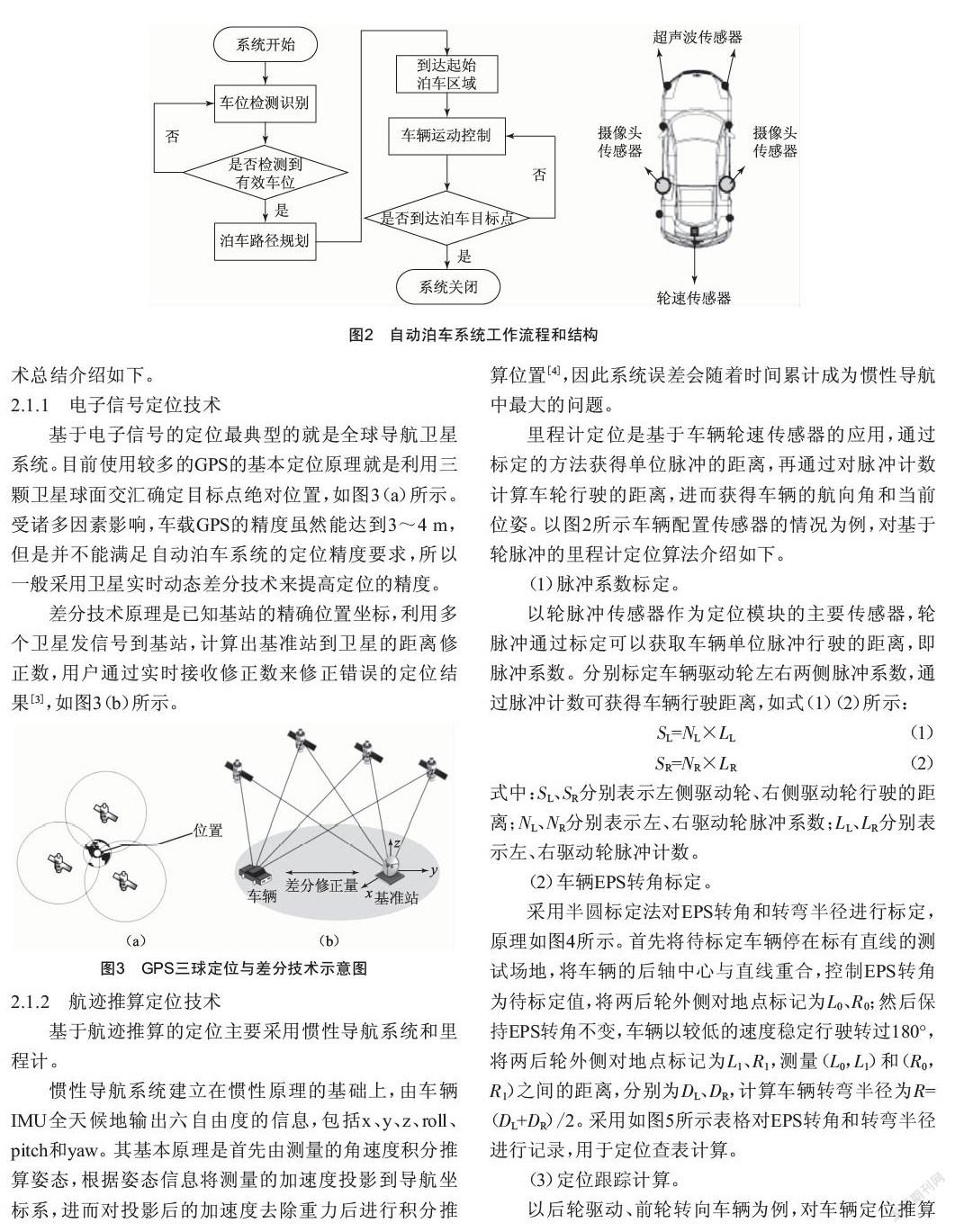
按照泊車過程分析,整個自動泊車過程可分為尋找可停車位和泊入已選車位兩個步驟,其工作流程和結構如圖2所示。
2 ? ?建圖定位關鍵技術
建圖定位模塊的關鍵技術主要包括車輛本身定位和車位地圖掃描兩個部分。該模塊需要完成車輛周圍信息的感知和建模,車輛自身的定位和跟蹤反饋,所建立的地圖和定位信息是自動泊車路徑規劃和控制決策模塊的根本基礎,也是決定車輛自動泊車質量的直接因素。
2.1 ? ?定位技術
根據車輛配置的不同,對自動泊車常用的定位技術總結介紹如下。
2.1.1 ? ?電子信號定位技術
基于電子信號的定位最典型的就是全球導航衛星系統。目前使用較多的GPS的基本定位原理就是利用三顆衛星球面交匯確定目標點絕對位置,如圖3(a)所示。受諸多因素影響,車載GPS的精度雖然能達到3~4 m,但是并不能滿足自動泊車系統的定位精度要求,所以一般采用衛星實時動態差分技術來提高定位的精度。
差分技術原理是已知基站的精確位置坐標,利用多個衛星發信號到基站,計算出基準站到衛星的距離修正數,用戶通過實時接收修正數來修正錯誤的定位結果[3],如圖3(b)所示。
2.1.2 ? ?航跡推算定位技術
基于航跡推算的定位主要采用慣性導航系統和里程計。
慣性導航系統建立在慣性原理的基礎上,由車輛IMU全天候地輸出六自由度的信息,包括x、y、z、roll、pitch和yaw。其基本原理是首先由測量的角速度積分推算姿態,根據姿態信息將測量的加速度投影到導航坐標系,進而對投影后的加速度去除重力后進行積分推算位置[4],因此系統誤差會隨著時間累計成為慣性導航中最大的問題。
里程計定位是基于車輛輪速傳感器的應用,通過標定的方法獲得單位脈沖的距離,再通過對脈沖計數計算車輪行駛的距離,進而獲得車輛的航向角和當前位姿。以圖2所示車輛配置傳感器的情況為例,對基于輪脈沖的里程計定位算法介紹如下。
(1)脈沖系數標定。
以輪脈沖傳感器作為定位模塊的主要傳感器,輪脈沖通過標定可以獲取車輛單位脈沖行駛的距離,即脈沖系數。分別標定車輛驅動輪左右兩側脈沖系數,通過脈沖計數可獲得車輛行駛距離,如式(1)(2)所示:
SL=NL×LL(1)
SR=NR×LR(2)
式中:SL、SR分別表示左側驅動輪、右側驅動輪行駛的距離;NL、NR分別表示左、右驅動輪脈沖系數;LL、LR分別表示左、右驅動輪脈沖計數。
(2)車輛EPS轉角標定。
采用半圓標定法對EPS轉角和轉彎半徑進行標定,原理如圖4所示。首先將待標定車輛停在標有直線的測試場地,將車輛的后軸中心與直線重合,控制EPS轉角為待標定值,將兩后輪外側對地點標記為L0、R0;然后保持EPS轉角不變,車輛以較低的速度穩定行駛轉過180°,將兩后輪外側對地點標記為L1、R1,測量(L0,L1)和(R0,R1)之間的距離,分別為DL、DR,計算車輛轉彎半徑為R=(DL+DR)/2。采用如圖5所示表格對EPS轉角和轉彎半徑進行記錄,用于定位查表計算。
(3)定位跟蹤計算。
以后輪驅動、前輪轉向車輛為例,對車輛定位推算建立如圖6所示模型。
通過對左右兩側輪脈沖系數標定得到左右兩側車輪行駛距離,如式(1)(2)所示,可得車輛后軸中心行駛距離如下:
S=(SL+SR)/2 (3)
利用查表法(圖5)獲取當前EPS轉角下的轉彎半徑R,由圖6可知:
θ1=θ2 (4)
θ1=S/R(5)
因此,定位模塊輸出車輛姿態信息如下:
x=Rcos θ-R(6)
y=Rsin θ(7)
θ=(NL×LL+NR×LR)/(2R)(8)
2.1.3 ? ?環境特征匹配定位技術
基于環境特征匹配的定位技術最典型的應用是激光雷達技術。激光雷達以激光為載波,形成點云形式的數據,通過發射信號和反射信號進行測距測速和識別。激光雷達主要由激光發射器、激光接收器和光學掃描鏡三部分組成,基本工作過程是激光發射系統將電脈沖轉換為光脈沖發出,激光脈沖在障礙物表面發生漫反射,部分反射光束會沿著和入射光束一樣的方向返回。在光速已知的情況下,通過測量發射至接收脈沖的時間差計算出距離。
2.2 ? ?車位識別技術
以圖2所示車輛配置的超聲波傳感器和攝像頭情況為例,車位識別主要涉及兩種技術:一種是通過車輛超聲波傳感器進行車位障礙物的識別和矯正,另一種是通過攝像頭進行車位線的識別和矯正。
尋庫階段主要任務是對車位進行掃描和識別,尋找可停車位;入庫階段主要任務是在確定泊入庫位后,通過車輛前后攝像頭和超聲波傳感器實時對庫位信息進行矯正,更新庫位地圖,以保證車輛安全、順利、準確地完成泊入。
2.2.1 ? ?超聲波邊緣檢測技術
尋庫階段對車位進行掃描和識別,主要是利用超聲波對障礙物邊界進行檢測,從而確定可停庫位的邊緣。通過車輛上側面安裝的超聲波傳感器,在車輛行進過程中實時收集數據,確定環境中的障礙物情況。其原理如圖7所示。
入庫階段超聲波檢測技術主要對已選定的泊車庫位進行矯正和更新,利用車輛上前后安裝的超聲波傳感器,在車輛泊入過程中進行障礙物邊界更新。其原理如圖8所示。
2.2.2 ? ?攝像頭車位線檢測技術
在尋庫階段,利用左右魚眼攝像頭傳感器提供圖像特征信息,通過車位識別算法正確檢測車位的4條邊線,進行車位掃描和識別。
在入庫階段,利用前后魚眼攝像頭提供的圖像信息對尋庫結果進行更新,進一步提升地圖的精度,保證車輛順利完成泊車控制。
3 ? ?建圖定位測試與評價
對自動泊車建圖定位模塊的評價主要包括對定位算法的評價和對車位地圖的評價兩方面。其中,對定位算法的評價以車輛位姿(x、y、θ)的準確性、實時性為測量指標和參數;對車位地圖的評價是將算法庫輸出車位與真實車位進行對比,可從車位的漏檢、誤檢以及車位的準確度3個方面進行測試。
4 ? ?結語
通過總結和分析可推斷,未來自動泊車系統中建圖定位的各類算法將進一步融合,取長補短。利用各類傳感器、算法的融合實現環境感知客觀清晰、控制算法高效精準且穩定,是今后自動泊車技術的重點發展方向;同時自動泊車中應用的建圖定位方法可進一步推廣至其他自動駕駛領域,對整個自動駕駛技術的發展具有普適性。
[參考文獻]
[1] 吳飛龍.自動泊車系統路徑規劃及其跟蹤控制算法研究[D].青島:青島理工大學,2021.
[2] 曾虹鈞.基于多信息融合的自動泊車控制系統研究[D].西安:西安科技大學,2020.
[3] 張琦.基于組合慣導的多傳感器車輛定位系統設計[D].開封:河南大學,2020.
[4] 錢闖.弱GNSS信號區域的GNSS/INS/LiDAR高精度定位方法及其應用研究[D].武漢:武漢大學,2017.
收稿日期:2022-03-15
作者簡介:安林芳(1991—),女,河北人,助教,研究方向:自動駕駛、機電一體化。
