三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的設(shè)計(jì)及性能分析
2022-05-06 02:14:30傅雨晨
工程設(shè)計(jì)學(xué)報(bào) 2022年2期
關(guān)鍵詞:模態(tài)結(jié)構(gòu)
豐 飛,傅雨晨,范 偉,馬 舉
(1.龍巖技師學(xué)院,福建 龍巖 364000;2.華僑大學(xué)機(jī)電及自動(dòng)化學(xué)院,福建 廈門 361021)
隨著微納驅(qū)動(dòng)、微機(jī)電控制驅(qū)動(dòng)等技術(shù)的迅猛發(fā)展,高精度的微納驅(qū)動(dòng)定位平臺(tái)[1-3]被廣泛應(yīng)用于微生物操作臺(tái)、高精度加工臺(tái)和光學(xué)快速反射鏡等[4-8]。其中,壓電陶瓷作為微納驅(qū)動(dòng)定位平臺(tái)的核心部件,其輸出位移不足幾十微米,存在一定的局限性。隨著對(duì)微位移放大機(jī)構(gòu)性能要求的提高,有必要研制新型的微位移放大機(jī)構(gòu)來對(duì)位移進(jìn)行放大并傳輸[9-11]。基于柔性鉸鏈的微位移放大機(jī)構(gòu)能夠產(chǎn)生較大的輸出位移,因此受到了國內(nèi)外學(xué)者的廣泛關(guān)注[12-15]。倪迎雪等[16]研究了一種新型混合柔性鉸鏈的柔度,為該柔性鉸鏈的設(shè)計(jì)和優(yōu)化提供了理論依據(jù)。余躍慶等[17]設(shè)計(jì)了一種高精度的大變形柔性鉸鏈,通過仿真和試驗(yàn)發(fā)現(xiàn),用X形柔性鉸鏈替代傳統(tǒng)的剛性轉(zhuǎn)動(dòng)副可以較大程度地提高并聯(lián)機(jī)器人的運(yùn)動(dòng)精度和綜合性能。張法業(yè)等[18]將柔性鉸鏈結(jié)構(gòu)應(yīng)用于光纖光柵加速度傳感器,大大提高了傳感器的橫向抗擾能力和靈敏度。Choi等[19]基于直圓形柔性鉸鏈設(shè)計(jì)和優(yōu)化了一種對(duì)稱式位移放大機(jī)構(gòu)。根據(jù)紅外光譜儀動(dòng)鏡支撐機(jī)構(gòu)高精度、高帶寬的要求[20],張明月等[21]采用平行簧片結(jié)構(gòu)設(shè)計(jì)了一種動(dòng)鏡柔性支撐機(jī)構(gòu)。Wang等[22]基于直圓形柔性鉸鏈設(shè)計(jì)了一種三級(jí)混合式位移放大機(jī)構(gòu)并應(yīng)用于微夾鉗,大大增大了微夾鉗的夾持行程。
為了解決微位移放大機(jī)構(gòu)鉸鏈單一、位移放大倍數(shù)偏小等缺陷,同時(shí)為了滿足壓電驅(qū)動(dòng)系統(tǒng)高精度、大行程的輸出要求,筆者設(shè)計(jì)了一種三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)。首先,推導(dǎo)了微位移放大機(jī)構(gòu)的位移放大公式和放大比;其次,對(duì)兩級(jí)杠桿中支點(diǎn)鉸鏈的類型進(jìn)行仿真對(duì)比,分析直圓形、直梁形、直圓長形鉸鏈對(duì)輸入載荷的敏感性;然后,利用有限元分析軟件進(jìn)行微位移放大機(jī)構(gòu)靜力學(xué)和動(dòng)力學(xué)仿真,將位移放大比的仿真值與理論值進(jìn)行對(duì)比,來驗(yàn)證理論推導(dǎo)的正確性;最后,對(duì)微位移放大機(jī)構(gòu)的相對(duì)寄生運(yùn)動(dòng)比和固定頻率進(jìn)行計(jì)算和仿真,來驗(yàn)證機(jī)構(gòu)設(shè)計(jì)的合理性和有效性。
1 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的設(shè)計(jì)
1.1 機(jī)構(gòu)的結(jié)構(gòu)設(shè)計(jì)及工作原理
三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的結(jié)構(gòu)如圖1所示。其主要由三角結(jié)構(gòu)、兩級(jí)杠桿結(jié)構(gòu)、定位板、壓電執(zhí)行器和若干定位銷組成。其中:2個(gè)三角結(jié)構(gòu)左右對(duì)稱分布,有利于提高位移放大倍數(shù)和輸出應(yīng)力;壓電執(zhí)行器放置在2個(gè)三角結(jié)構(gòu)的正中間,其輸出端緊緊貼合兩側(cè)三角結(jié)構(gòu)的輸入端。
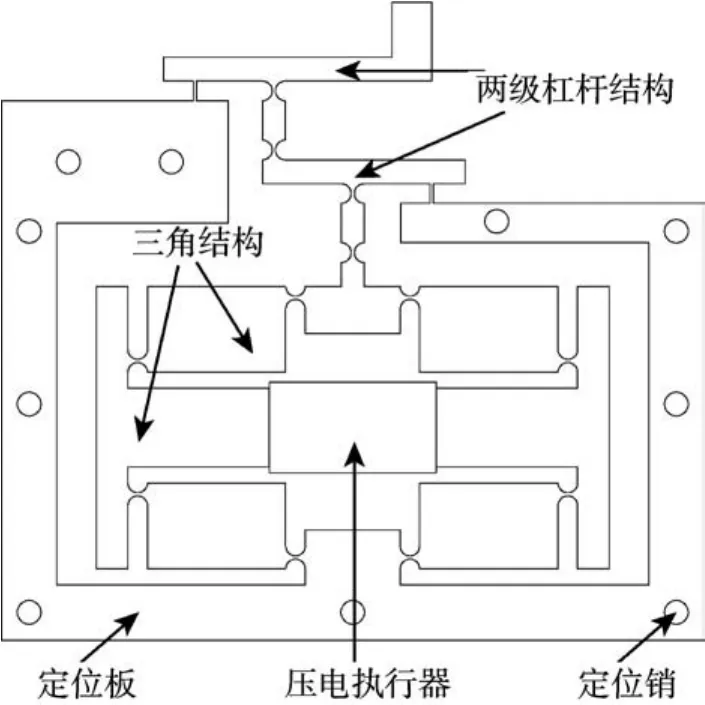
圖1 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的結(jié)構(gòu)Fig.1 Structure of triangular hybrid two-stage lever micro-displacement amplification mechanism
機(jī)構(gòu)的工作原理如圖2所示。當(dāng)壓電執(zhí)行器的輸入位移Δx對(duì)稱作用在輸入端2—3和12—13時(shí),分別由1—2—3—4和11—12—13—14組成的三角結(jié)構(gòu)對(duì)Δx進(jìn)行第1次放大;三角結(jié)構(gòu)的輸出端4—11與一級(jí)杠桿的輸入端5直接連接,所以一級(jí)杠桿的輸入位移近似為三角結(jié)構(gòu)的輸出位移,則Δx經(jīng)過一級(jí)杠桿10—5—6的第2次放大;輸出端6即為二級(jí)杠桿的輸入端7,Δx經(jīng)過二級(jí)杠桿8—7—9的第3次放大,最終在杠桿結(jié)構(gòu)末端9輸出位移ΔY。
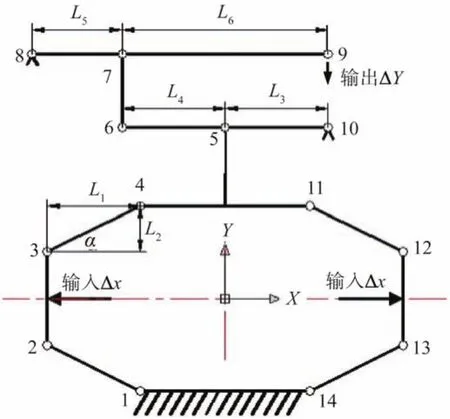
圖2 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)工作原理示意Fig.2 Schematic of working principle of triangular hybrid two-stage lever micro-displacement amplification mechanism
一級(jí)杠桿的輸入端與三角結(jié)構(gòu)的輸出端直接相連,大大減小了機(jī)構(gòu)的能量損失和位移損失。機(jī)構(gòu)的這種組合方式雖然不能保證去除非必要的寄生位移,但是可以在較小的結(jié)構(gòu)尺寸下得到較大的位移放大比,將輸入位移完成近似90°的轉(zhuǎn)向放大。
1.2 機(jī)構(gòu)參數(shù)分析
三角結(jié)構(gòu)和兩級(jí)杠桿結(jié)構(gòu)的工作原理如圖3所示。當(dāng)壓電執(zhí)行器對(duì)三角結(jié)構(gòu)對(duì)稱輸入2個(gè)大小相同、方向相反的水平位移Δx后,會(huì)在其輸出端輸出一個(gè)垂直方向的位移Δy,三角結(jié)構(gòu)中的夾角α隨之減小為α-θ,其中θ為鉸鏈的彎曲角度。
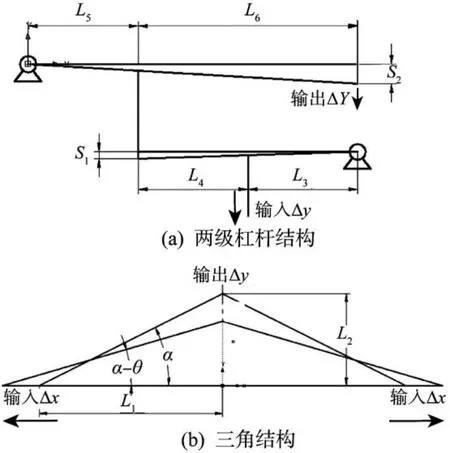
圖3 三角結(jié)構(gòu)和兩級(jí)杠桿結(jié)構(gòu)工作原理示意Fig.3 Schematic of working principle of triangular structure and two-stage lever structure
由圖3可知:
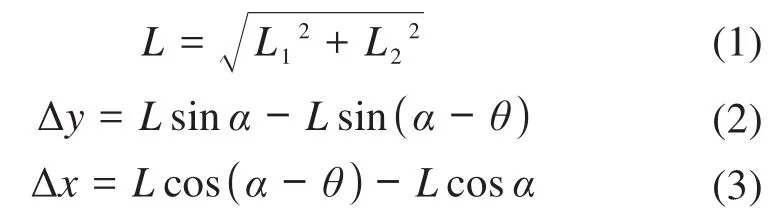
式中:L1為上部三角結(jié)構(gòu)中2個(gè)鉸鏈之間的橫向距離,L2為上部三角結(jié)構(gòu)中2個(gè)鉸鏈之間的縱向距離;L為2個(gè)鉸鏈之間的距離。
則三角結(jié)構(gòu)的放大倍數(shù)K為:
由于柔性鉸鏈的彎曲變形較小,可以忽略鉸鏈彎曲變形帶來的位移變化,因此θ≈0°。根據(jù)等價(jià)無窮小法則,得:sinθ≈θ,,則式(4)為:

所設(shè)計(jì)的三角結(jié)構(gòu)沿中心線上下對(duì)稱,且下部三角結(jié)構(gòu)與固定板直接相連。根據(jù)疊加定理,可得三角結(jié)構(gòu)的總放大比K'為:

針對(duì)兩級(jí)杠桿結(jié)構(gòu),定義2L3=2L4=2L5=L6,其中:L3為一級(jí)杠桿輸入點(diǎn)與支點(diǎn)鉸鏈之間的距離;L4為一級(jí)杠桿輸出點(diǎn)與支點(diǎn)鉸鏈之間的距離;L5為二級(jí)杠桿輸入點(diǎn)與支點(diǎn)鉸鏈之間的距離;L6為二級(jí)杠桿輸出點(diǎn)與支點(diǎn)鉸鏈之間的距離。則:
這是林書豪的綜藝導(dǎo)師首秀。其他導(dǎo)師一邊看選手激烈對(duì)決,一邊“插科打諢”制造笑料,林書豪卻專注著挑人。遇到實(shí)力派球員,他會(huì)送上一件代表晉級(jí)的球衣,即使面對(duì)發(fā)揮失常的選手,他也愿意“違反規(guī)則”,多給對(duì)方一次炫球技的機(jī)會(huì)。
式中:S1為一級(jí)杠桿的輸出位移;S2為二級(jí)杠桿的輸出位移。
因此,二級(jí)杠桿結(jié)構(gòu)的放大倍數(shù)K''為:

同時(shí),由于三角結(jié)構(gòu)的輸出端直接與兩級(jí)杠桿結(jié)構(gòu)的輸入端相連,則微位移放大機(jī)構(gòu)的總放大倍數(shù)K理為:
所設(shè)計(jì)的三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的結(jié)構(gòu)參數(shù)如表1所示。其中:t為直圓形鉸鏈的中心厚度;R為直圓形鉸鏈的切口半徑;d為直圓形和直梁形鉸鏈的切口長度。

表1 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的結(jié)構(gòu)參數(shù)Table 1 Structural parameters of triangular hybrid twostage lever micro-displacement amplification mechanism 單位:mm
將L1、L2的值代入式(12),可得該微位移放大機(jī)構(gòu)的理論總位移放大比為30.000。
1.3 兩級(jí)杠桿支點(diǎn)鉸鏈的對(duì)比分析
對(duì)兩級(jí)杠桿支點(diǎn)的鉸鏈類型進(jìn)行對(duì)比分析,以找到對(duì)輸入載荷具有更強(qiáng)敏感性的鉸鏈結(jié)構(gòu)。根據(jù)表1的鉸鏈參數(shù)值,選擇3種應(yīng)用最廣泛的鉸鏈結(jié)構(gòu),分別為直圓形、直圓長形和直梁形鉸鏈。鉸鏈材料為錳鋼,其密度為7 800 kg/m3,楊氏模量為210 GPa,泊松比為0.30,屈服極限為784 MPa。利用ANSYS軟件對(duì)采用上述3種支點(diǎn)鉸鏈的兩級(jí)杠桿機(jī)構(gòu)進(jìn)行不同輸入載荷下最大應(yīng)力、最大輸出位移的有限元分析,仿真結(jié)果如表2所示。其中,當(dāng)輸入載荷為2.0 MPa時(shí),機(jī)構(gòu)最大應(yīng)力和最大輸出位移如圖4所示。
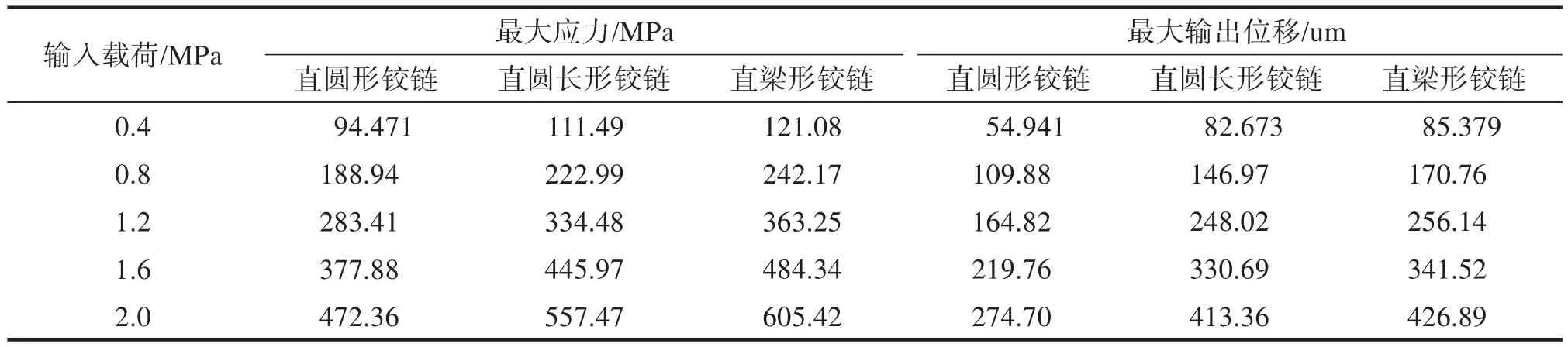
表2 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)在不同輸入載荷下最大應(yīng)力、最大輸出位移的有限元仿真結(jié)果Table 2 Finite element simulation results of maximum stress and maximum output displacement of triangular hybrid two-stage lever micro-displacement amplification mechanism under different input loads
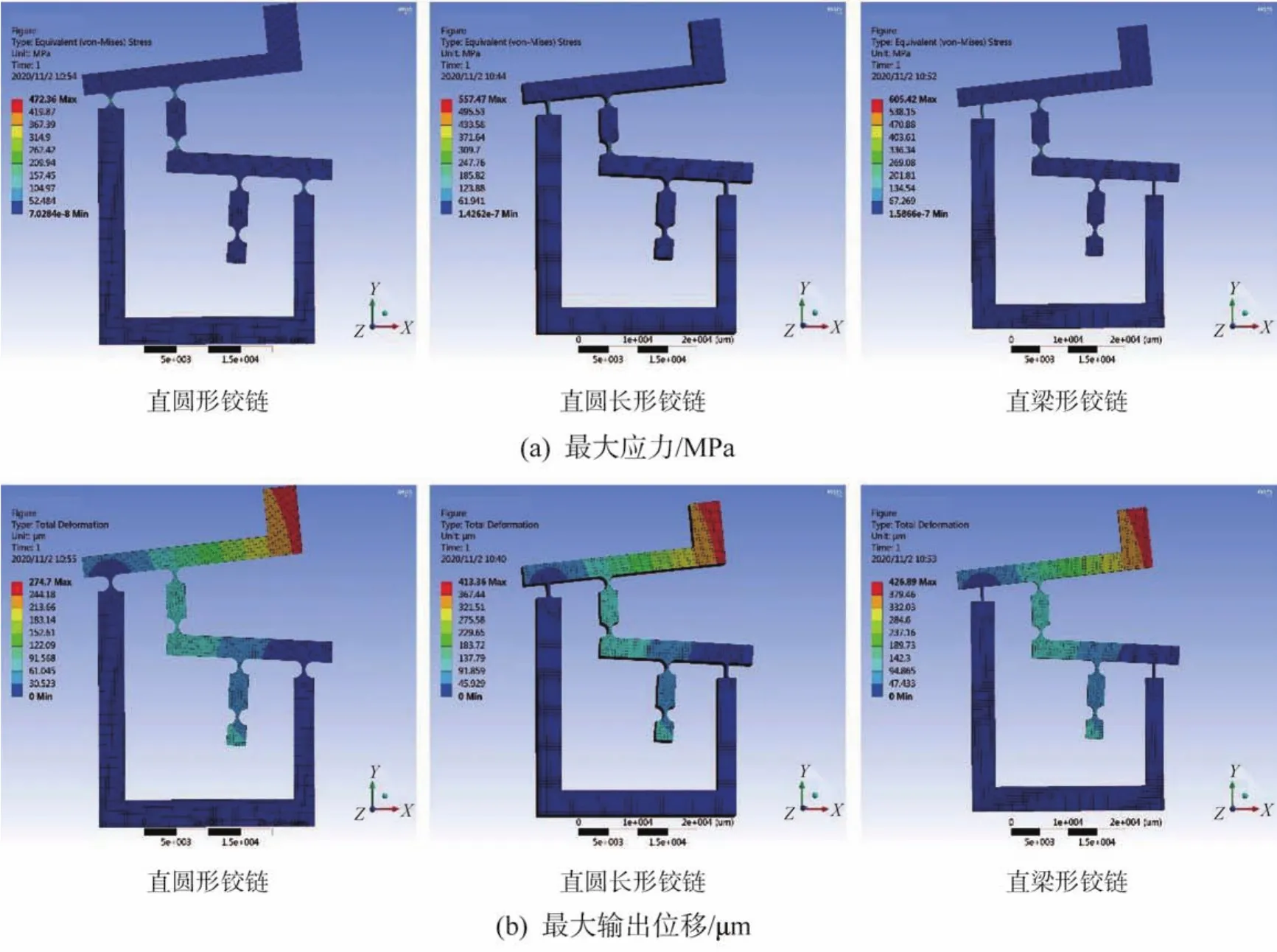
圖4 輸入載荷為2.0 MPa時(shí)三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的最大應(yīng)力和最大輸出位移Fig.4 Maximum stress and maximum output displacement of triangular hybrid two-stage lever micro-displacement amplification mechanism with input load of 20 MPa
由表2和圖4可知:兩級(jí)杠桿機(jī)構(gòu)的最大應(yīng)力均出現(xiàn)在鉸鏈結(jié)構(gòu)中厚度最小的中心處;同時(shí),隨著輸入載荷的增大,支點(diǎn)鉸鏈的類型會(huì)對(duì)機(jī)構(gòu)的輸出位移產(chǎn)生一定的影響。其中,采用直圓形鉸鏈的機(jī)構(gòu)在不同輸入載荷下的最大應(yīng)力和最大輸出位移均是最小的,當(dāng)輸入載荷為2.0 MPa載荷時(shí),其最大應(yīng)力僅為472.36 MPa,而采用其他2種鉸鏈的機(jī)構(gòu)的最大應(yīng)力也沒有超過錳鋼的屈服極限。采用直圓長形和直梁形鉸鏈的機(jī)構(gòu)的最大位移分別是采用直圓形鉸鏈機(jī)構(gòu)的1.505倍和1.554倍,說明在滿足屈服極限的前提下,直圓長形和直梁形鉸鏈對(duì)輸入載荷的敏感性更強(qiáng)。此外,隨著輸入載荷的增大,各最大應(yīng)力和最大輸出位移之間的差值越來越大。為了得到最佳的位移放大效果,采用敏感性更強(qiáng)的直梁形鉸鏈作為兩級(jí)杠桿結(jié)構(gòu)的支點(diǎn)鉸鏈。
2 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的靜力學(xué)和動(dòng)力學(xué)仿真
2.1 靜力學(xué)仿真
為了驗(yàn)證三角混合兩級(jí)杠桿微位移機(jī)構(gòu)的結(jié)構(gòu)合理性,對(duì)機(jī)構(gòu)進(jìn)行靜力學(xué)仿真。在Solidworks軟件中建立機(jī)構(gòu)的三維實(shí)體模型,在其定位板上設(shè)置若干定位銷,使機(jī)構(gòu)盡可能在X、Y兩個(gè)方向產(chǎn)生位移;機(jī)構(gòu)的結(jié)構(gòu)參數(shù)設(shè)置如表1,機(jī)構(gòu)的厚度為8 mm,鉸鏈材料的設(shè)置與理論分析時(shí)相同。采用ANSYS軟件對(duì)機(jī)構(gòu)模型進(jìn)行網(wǎng)格劃分,網(wǎng)格大小為2 000 μm,并設(shè)定壓電執(zhí)行器的輸出位移為20 μm,即Δx=10 μm;對(duì)機(jī)構(gòu)的應(yīng)力和總輸出位移進(jìn)行有限元仿真,仿真結(jié)果如圖5所示。
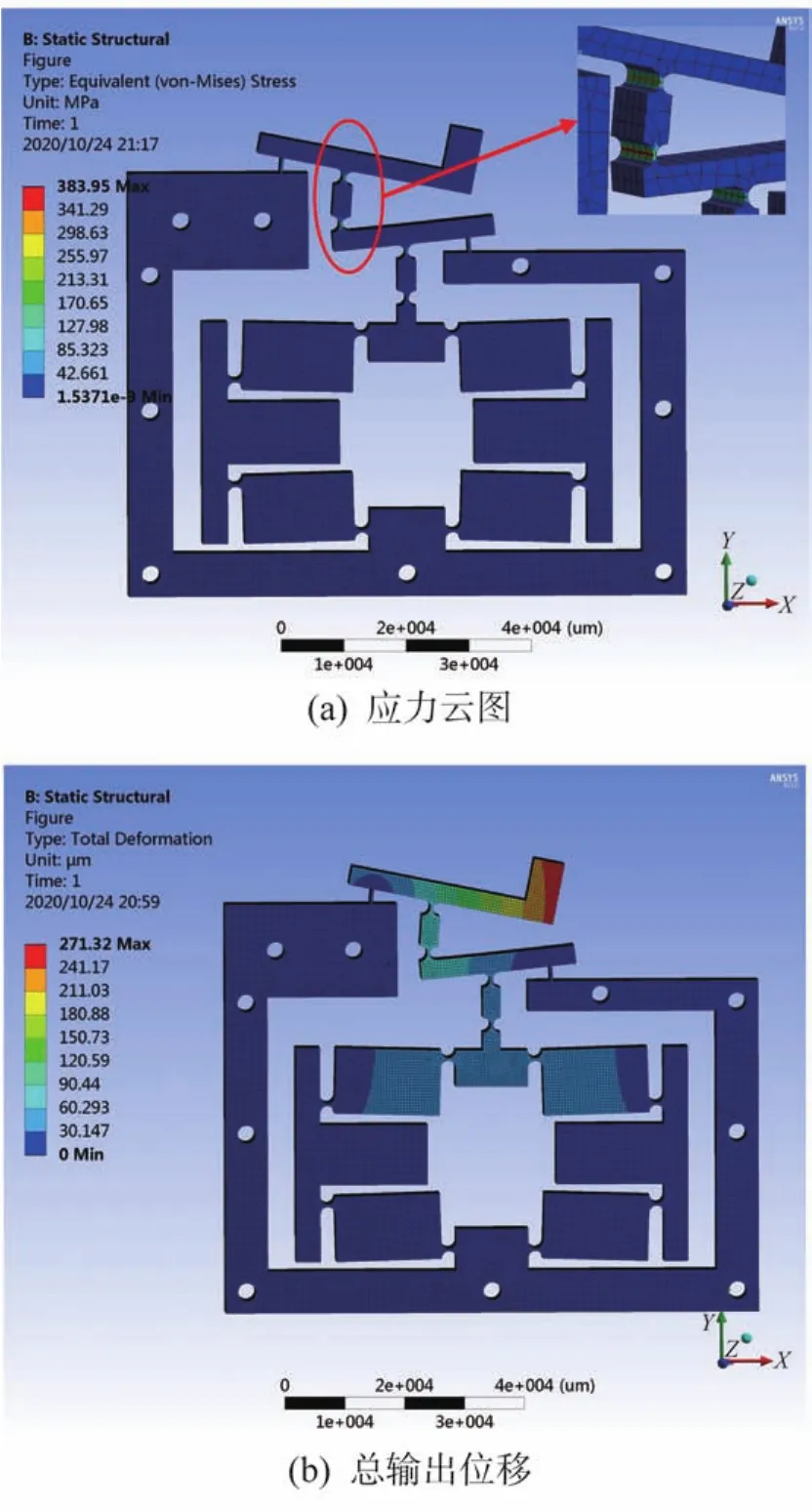
圖5 Δx=10 μm時(shí)三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的應(yīng)力云圖和總輸出位移Fig.5 Stress nephogram and total output displacement of triangular hybrid two-stage lever micro-displacement amplification mechanism when Δx=10 μm
由圖5(a)可知,當(dāng)輸入位移為10 μm時(shí),機(jī)構(gòu)的最大應(yīng)力出現(xiàn)在二級(jí)杠桿的支點(diǎn)鉸鏈處,為383.95 MPa,且小于錳鋼的屈服極限。因此,所設(shè)計(jì)的微位移放大機(jī)構(gòu)在形變的過程中受到的應(yīng)力不會(huì)超過屈服極限,不會(huì)發(fā)生斷裂。同時(shí)可以看到,由于機(jī)構(gòu)中三角結(jié)構(gòu)對(duì)稱設(shè)置,三角結(jié)構(gòu)的應(yīng)力也近似呈對(duì)稱分布,從而保證了機(jī)構(gòu)的穩(wěn)定性,有利于機(jī)構(gòu)的運(yùn)行。
2.2 動(dòng)力學(xué)仿真
通過對(duì)微位移放大機(jī)構(gòu)的靜力學(xué)仿真,可以分析機(jī)構(gòu)在一定輸入位移下的靜態(tài)響應(yīng),而動(dòng)力學(xué)仿真則用來評(píng)價(jià)機(jī)構(gòu)的動(dòng)態(tài)性能。其常用的評(píng)價(jià)指標(biāo)有固有頻率、轉(zhuǎn)動(dòng)剛度和轉(zhuǎn)動(dòng)應(yīng)力等,其中固有頻率對(duì)機(jī)構(gòu)的驅(qū)動(dòng)控制精度和動(dòng)態(tài)響應(yīng)能力有較大的影響。利用ANSYS軟件進(jìn)行機(jī)構(gòu)固有頻率的動(dòng)力學(xué)仿真。取前6階模態(tài)進(jìn)行分析,參數(shù)設(shè)置同上。機(jī)構(gòu)前6階模態(tài)及對(duì)應(yīng)的固有頻率如圖6和表3所示。
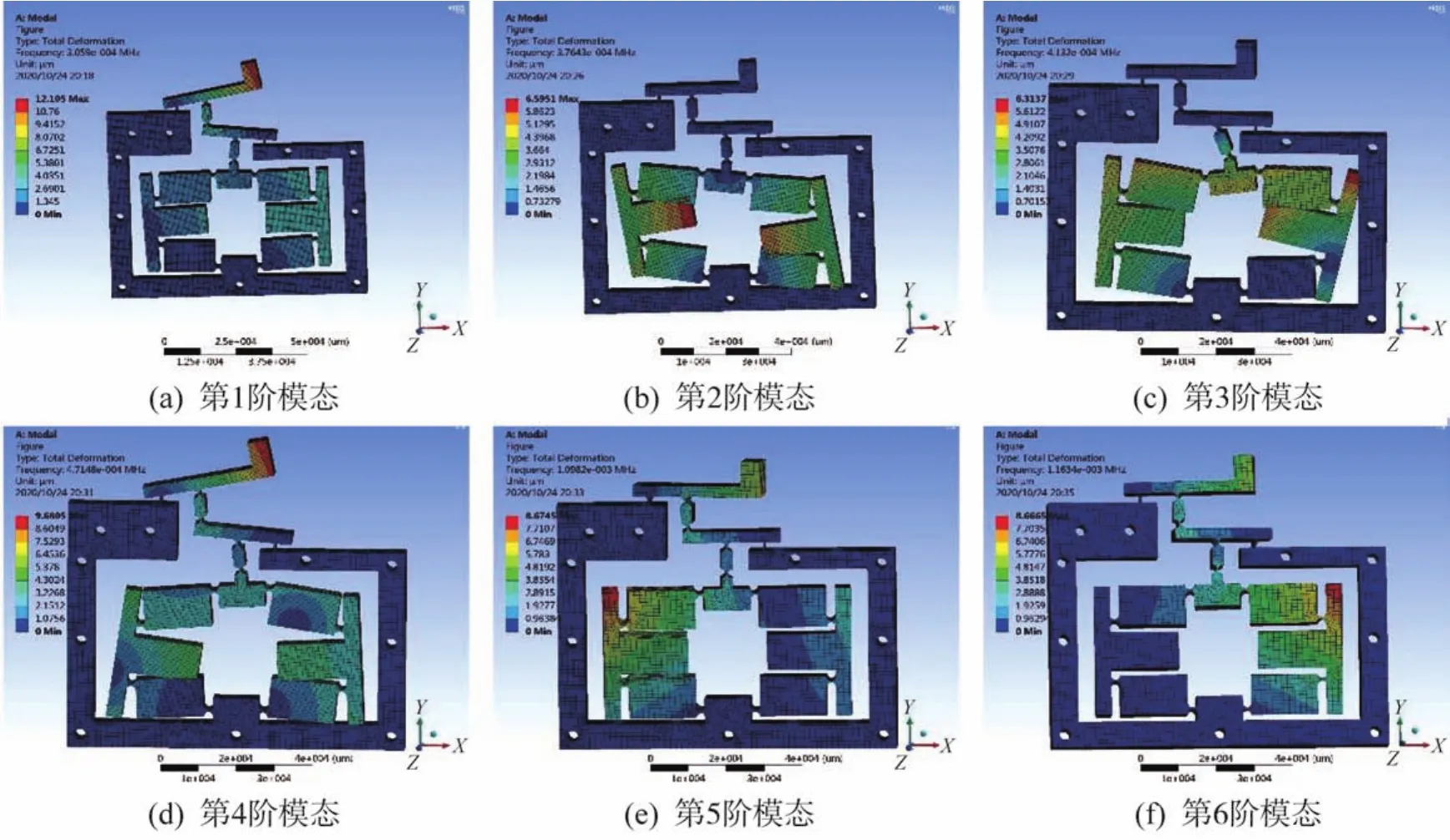
圖6 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)前六階模態(tài)Fig.6 The first six modes of triangular hybrid two-stage lever micro displacement amplification mechanism

表3 三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)的固有頻率Table 3 Natural frequency of triangular hybrid two-stage lever micro displacement amplification mechanism 單位:Hz
由圖6可知:機(jī)構(gòu)的第1階模態(tài)與機(jī)構(gòu)的正常運(yùn)動(dòng)狀態(tài)基本對(duì)應(yīng),基本上沒有發(fā)生平面的扭曲變形;從第2階模態(tài)開始,三角結(jié)構(gòu)出現(xiàn)了不同程度的扭曲,在第2,3,4階模態(tài)三角結(jié)構(gòu)出現(xiàn)了擠壓變形,兩級(jí)杠桿結(jié)構(gòu)也開始逐漸發(fā)生扭曲變形;從第5階模態(tài)開始兩級(jí)杠桿結(jié)構(gòu)出現(xiàn)明顯的向平面單側(cè)的翻轉(zhuǎn)變形,三角結(jié)構(gòu)輕微翻轉(zhuǎn);相比第5階模態(tài),在第6階模態(tài)2種結(jié)構(gòu)的翻轉(zhuǎn)幅度有所減小,但仍然存在一定程度的平翻轉(zhuǎn)現(xiàn)象,表明該機(jī)構(gòu)容易在較高階模態(tài)下發(fā)生一定程度的偏離平面的振動(dòng)。
由表3可知,機(jī)構(gòu)的固有頻率在第5階模態(tài)發(fā)生了驟變,導(dǎo)致機(jī)構(gòu)開始向平面外翻轉(zhuǎn)。
綜上可知,第1階模態(tài)的305.90 Hz是仿真條件下最理想的固有頻率,此時(shí)機(jī)構(gòu)具有較強(qiáng)的抗干擾能力和較好的動(dòng)力學(xué)性能。
3 結(jié) 論
1)設(shè)計(jì)了一種三角混合兩級(jí)杠桿微位移放大機(jī)構(gòu)。對(duì)其兩級(jí)杠桿結(jié)構(gòu)中的支點(diǎn)鉸鏈類型進(jìn)行了對(duì)比分析,結(jié)果表明,直梁形鉸鏈對(duì)輸入載荷的敏感性較強(qiáng)。并在此基礎(chǔ)上,通過理論推導(dǎo)和有限元仿真得到了微位移放大機(jī)構(gòu)的位移放大比分別為30.000和27.132,相對(duì)誤差僅為9.56%。
2)通過機(jī)構(gòu)靜力學(xué)和動(dòng)力學(xué)仿真得到機(jī)構(gòu)的相對(duì)寄生運(yùn)動(dòng)比為0.348 2,第1階固有頻率最佳,表明機(jī)構(gòu)具有較小的寄生位移、較強(qiáng)的抗干擾能力和較好的動(dòng)力學(xué)性能,該結(jié)構(gòu)是有效、可行的。研究結(jié)果為壓電驅(qū)動(dòng)器或快速反射鏡支撐結(jié)構(gòu)實(shí)現(xiàn)大量程的位移輸出提供了一定的理論指導(dǎo)。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
