山地物探電動鉆機模塊化設計及安全性分析
2022-05-06 02:14:28黃志強喻洪梅馬亞超
工程設計學報 2022年2期
黃志強,喻洪梅,馬亞超,謝 豆,周 操
(1.西南石油大學機電工程學院,四川 成都 610500;2.西南石油大學石油天然氣裝備教育部重點實驗室,四川 成都 610500)
川渝地區是頁巖氣、天然氣的主要產區之一。為了將西南油氣田建設成為“西南氣大慶”的一個資源開發區,必須加快川渝地區油氣資源的開發。川渝地區的地貌以山地、丘陵等復雜地形為主,道路崎嶇不平,山路狹窄且陡峭,車載大型油氣勘探設備無法到達勘探現場,便攜式山地物探鉆機已經成為川渝地區油氣勘探開發的主要設備[1]。因此,對山地物探鉆機的輕量化、模塊化和搬運的便利性提出了較高的要求[2-3]。山地物探鉆機是一種由柴油發動機和汽油發動機驅動的勘探設備,作業時噪聲大[4],尾氣排放量大,尾氣排放超過了國家規定的排放標準。又由于地形條件的限制及鉆機自身較重,鉆機搬運不便,鉆井作業效率不高,操作人員工作環境差,限制了山地物探鉆機的進一步應用。
許多學者對山地物探鉆機的結構和性能進行了研究。例如:賀子延等[5]設計了一種輕便氣動鉆機,由汽油發動機提供動力,鉆機各模塊質量小于40 kg,總質量為390 kg,采用插接連接、銷軸固定的方式,底架安裝橡膠罩體以減小尾氣對環境的污染,并通過在黃土塬地區的現場實驗證明該鉆機具有較高的鉆井效率;樊慧文等[6]開發了HY-40F新型山地鉆機,該鉆機分為發動機模塊、油泵油箱模塊、散熱器模塊、底座模塊、井架及支架模塊和動力頭模塊,相較HY-40鉆機,各模塊和整機的質量都較小,各模塊的質量小于75 kg,整機質量小于350 kg,并通過現場實驗證明了鉆機性能的可靠性;楊鳳申等[7]分別對山地鉆機的主機動力結構、井架、滑架以及新型空氣壓縮機進行了創新設計、優化設計和匹配設計,減小了主機質量(主機動力模塊用1臺發動機),減少了能量損失,保證了鉆機的鉆井穩定性和負載能力,提高了鉆機的鉆井能力[7]。國外研制的山地物探鉆機主要有加拿大Canterra公司生產的CT-155/CT-255/256CT-200(主機)/CT-201(氣源)型鉆機、美國GEOREX公司生產的PT-100型鉆機、ARDCO公司生產的HMP-125型鉆機、法國Sercel公司生產的TD150S型鉆機和新加坡國家地震勘探公司生產的SS-175/SSC-110型鉆機等。上述鉆機均采用燃油機驅動,整機質量在600 kg以上,且占地面積大,污染嚴重。其優點為:采用組合框架結構;鉆機底座采用擺動架調節,底座支腿采用插銷調節,調節均比較方便;底架及井架采用手動快速鎖緊機構;皮帶張緊結構較為合理[8]。
綜上,現有山地物探鉆機主要由汽油機和柴油機驅動,單個模塊和整機的質量均較大,模塊數量較多,拆裝、搬運不便,在鉆井作業時噪聲大、尾氣排放嚴重。為了改變現有山地物探鉆機的燃油驅動方式,促進鉆機向低噪聲、尾氣零排放方向發展,筆者提出了山地物探電動鉆機模塊化設計方案。基于模糊綜合評價法和對比法優選適合川渝地區勘探作業的電動鉆機的關鍵部件,采用有限元分析方法進行電動鉆機的安全性分析,并開展了現場鉆井實驗來驗證鉆機設計的合理性與安全性,以期實現電動鉆機低噪聲、尾氣零排放、輕量化、模塊化和便于搬運等的設計目標。
1 山地物探電動鉆機模塊化設計方案
山地物探電動鉆機包括底盤、提升裝置、旋轉裝置、桅桿、導向裝置和拉桿等六大部分。其中:底盤是支撐部件;桅桿是受力和導向部件,導向架沿桅桿上下滑動;拉桿用來增強鉆機的穩定性。
山地物探電動鉆機的設計要求如下:
1)提升裝置的最大提升力為7 kN;
2)旋轉裝置的旋轉扭矩為600 N·m,輸出轉速為120~200 r/min;
3)提升裝置和旋轉裝置均采用電機驅動。
1.1 方案設計
1.1.1 驅動電機
提升裝置和旋轉裝置是鉆機的核心部件。提升裝置用來控制鉆具的提升與下降,提供提升力。旋轉裝置用來控制鉆具的正反轉、提供鉆頭的破巖扭矩及連接與拆卸鉆桿和鉆具等。提升裝置和旋轉裝置的性能直接影響鉆機勘探開發的效率。工業上采用的驅動電機種類繁多,本文選擇直流電機、異步電機、永磁同步電機和開關磁阻電機作為鉆機備選驅動電機。驅動電機特性的對比如表1所示。
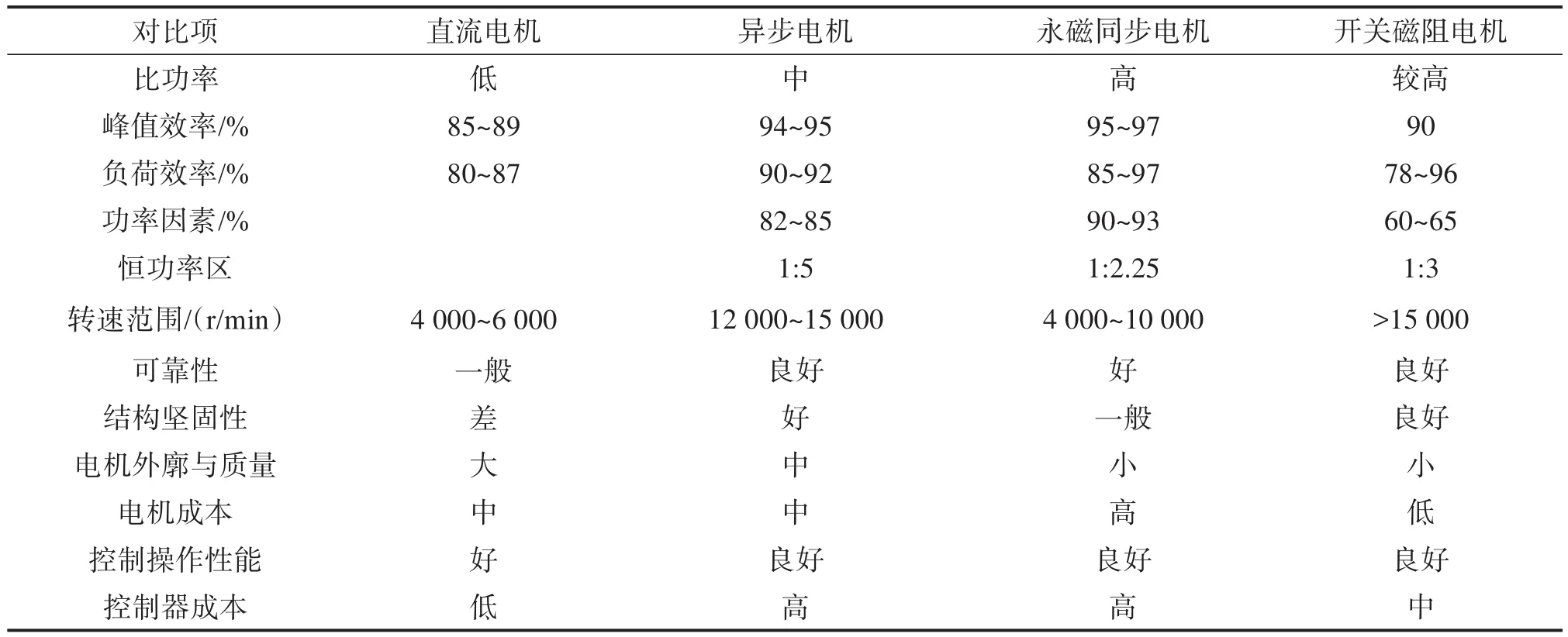
表1 驅動電機特性對比Table 1 Comparison of drive motor characteristics
各驅動電機各有優缺點,故下文將通過模糊綜合評價法優選適合川渝地區勘探作業的鉆機的電機。
1.1.2 傳動方式
通過傳動實現旋轉裝置、鉆桿和鉆具的上下移動。本文選擇滾珠絲杠傳動[9]、渦輪絲杠傳動[10]、鏈輪鏈條傳動和帶傳動[11]作為備選傳動方式。傳動方式的優缺點對比如表2所示。

表2 傳動方式優缺點對比Table 2 Comparison of advantages and disadvantages of transmission mode
由表2可知,各傳動方式各有優缺點,故下文將通過模糊綜合評價法優選傳動方式。
1.1.3 減速器
減速器是提升裝置和旋轉裝置的重要部件,其性能直接影響鉆井效率。本文選擇較適合勘探作業的擺線針輪減速器和渦輪蝸桿減速器作為備選減速器。其性能對比如表3所示。
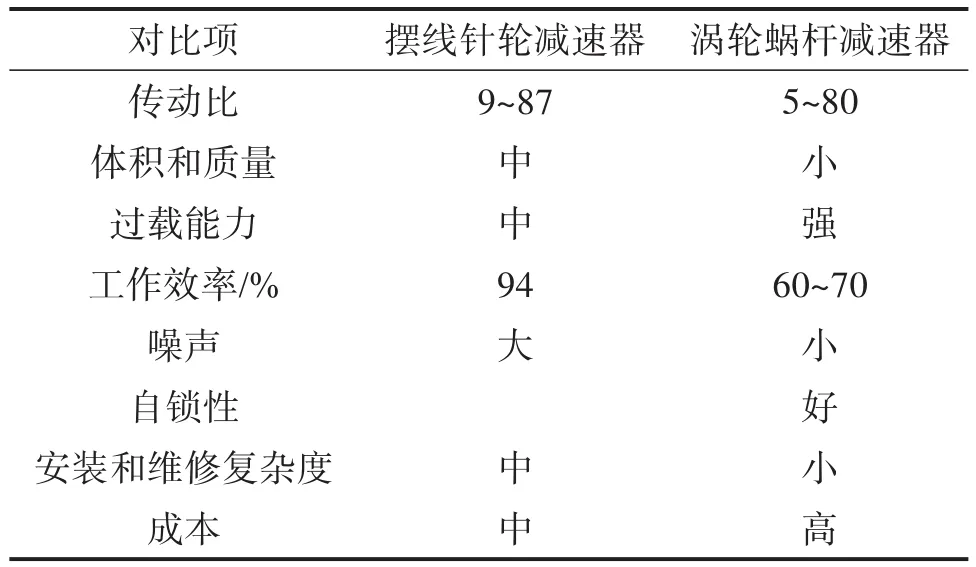
表3 減速器性能對比Table 3 Comparison of reducer performance
由表3可知,渦輪蝸桿減速器的體積、質量和工作中的噪聲較小,過載能力較強,且其自鎖性能夠防止在鉆桿提升與下降時由慣性導致的鉆機結構的損壞,因而確定渦輪蝸桿減速器為山地物探電動鉆機的減速器。
1.1.4 支撐部件
底盤位于電動鉆機的底部,在鉆機作業過程中對鉆機整體起支撐作用,必要時可以在其上放置鉆桿以及相應的配重來增加工作鉆壓。因此,要求底盤具有良好的移運性、可拆裝性以及較強的承載能力。鑒于此,將底盤設計成K形和π形兩種結構,如圖1所示。

圖1 底盤設計Fig.1 Chassis design
K形底盤由多根矩形管焊接而成。其耗材多,成本高,但整體受力均勻,結構穩定性好。將鉆機整體的重心置于底盤中心,底盤與4根拉桿連接,可以增強鉆機的穩定性,使其不易傾覆。
π形底盤焊接所用的矩形管較少,成本較低,且留有足夠的操作空間便于操作人員拆卸鉆桿和鉆具。在承載桅桿重量的矩形管與其余2根矩形管的焊接處各增加一塊加強板,有助于將鉆機整體的重量分散到底盤上,提高底盤的安全性與穩定性。雖然底盤上鉆機重心前移,易發生傾覆,但可依靠鉆機自身的重量增加一定的鉆壓。
K形和π形底盤的參數如表4所示。由表可知:π形底盤的外形尺寸和質量均小于K形底盤;與桅桿采用銷軸連接,比螺栓連接方便快捷。因此,π形底盤在山地勘探鉆井作業時更便于搬運。
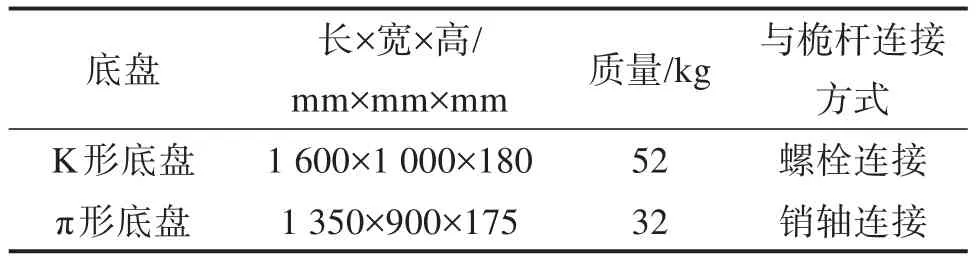
表4 底盤參數Table 4 Chassis parameters
綜合來看,選擇π形底盤為電動鉆機的支撐部件。
1.1.5 導向部件
桅桿是電動鉆機的重要組成部分[12],是鉆桿、動力頭的安裝支承部件和導向裝置的滑動導向部件。其性能直接影響電動鉆機的穩定性和可靠性[3,5,13-14]。針對此,設計了C形桅桿和單桅桿兩種結構,如圖2所示。
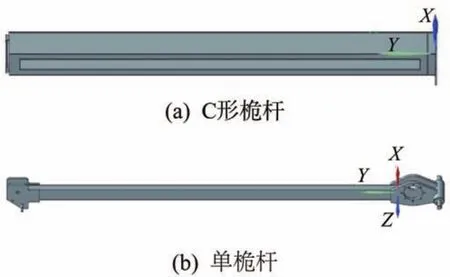
圖2 桅桿設計Fig.2 Mast design
C形桅桿采用內導向設計。導向裝置在桅桿內部滑動,桅桿下部焊接矩形板與底盤通過螺栓連接。其密封性好,強度高。
單桅桿采用外導向設計。將桅桿制作成無縫鋼管,桅桿底部的圓柱軸端面設計成圓平面,在與底盤鎖緊時,桅桿不易發生前搖后晃。鉆機無須工作時,能倒置在π形底盤上被運走。
對比C形桅桿與單桅桿可知,單桅桿耗材較少,體積和質量較小,拆裝、搬運較方便,更適合川渝地區的油氣勘探作業,因此選擇單桅桿為電動鉆機的導向部件。
1.2 驅動電機和傳動方式的確定
為了確定電動鉆機的驅動電機和傳動方式,對驅動電機和傳動方式的定性評價轉為定量評價。以模糊數學為理論基礎,對4種驅動電機和傳動方進行模糊綜合評價[15-17]。
1)確定因素論域。
根據電動鉆機野外勘探作業情況及驅動電機和傳動方式的評價指標,建立影響驅動電機和傳動方式的因素集X:

2)確定權重因子。
根據各因素對驅動電機和傳動方式的重要程度,采用層次分析法進行權重分配,各因素的權重因子之和為1。根據鉆井工人和相關專家的經驗確定驅動電機和傳動方式的權重集U:

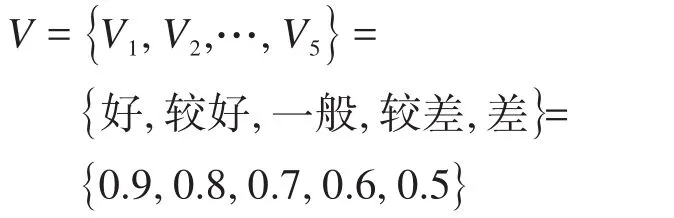
3)確定評價集。
對各因素進行5個等級的評價,確定評價集V:
4)建立模糊評價矩陣。
逐個對驅動電機和傳動方式從各個因素進行量化評價,得到單因素的模糊關系矩陣R:
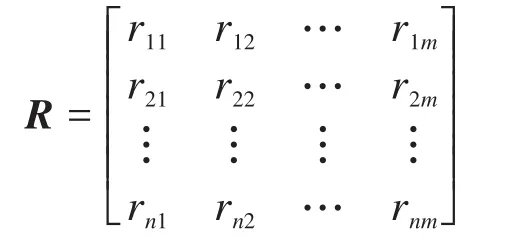
式中:m為評價方案的個數;n為評價指標的個數。
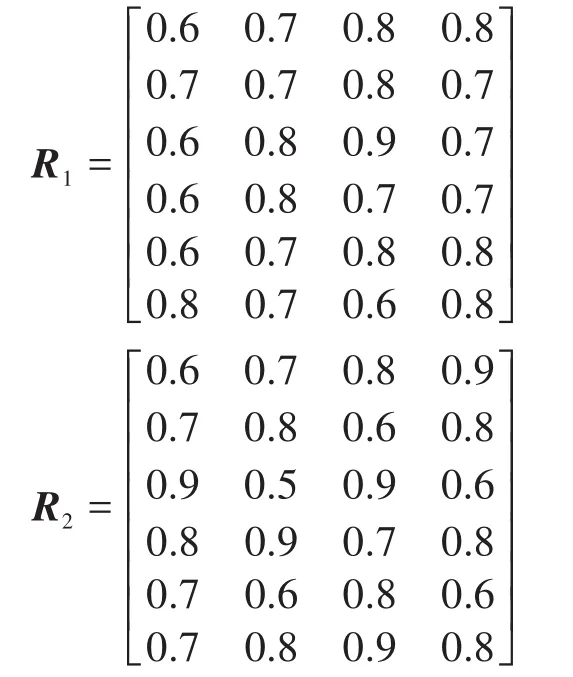
邀請4位勘探領域相關專家對每種方案各因素進行評價,得到驅動電機和傳動方式的模糊評價矩陣R1和R2分別為:
5)模糊綜合評判。
利用權重集U和模糊評價矩陣R1和R2得到驅動電機和傳動方式的模糊綜合評價矩陣B1和B2。
B1=UR1=[0.648 0.735 0.981 0.747]
B2=UR2=[0.737 0.715 0.780 0.748]
4種電機和傳動方式的模糊綜合評價結果如表5、表6所示。由表可知,永磁同步電機和鏈輪鏈條傳動的綜合評分最高,故被選為電動鉆機的驅動電機和傳動方式。它們不僅能夠滿足山地物探電動鉆機的性能要求,而且能夠很好地適用于川渝地區野外勘探環境。
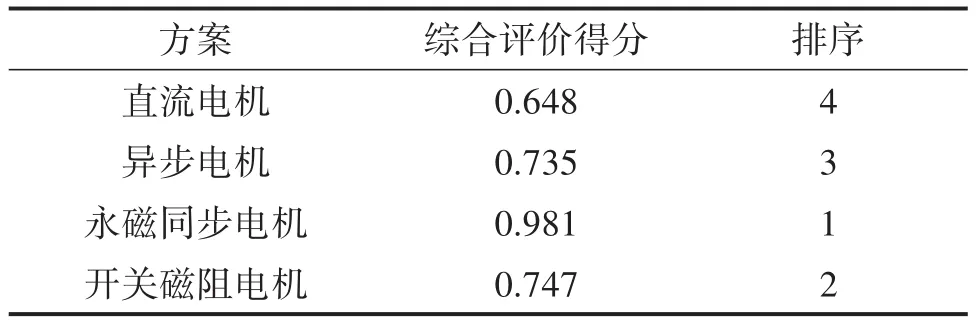
表5 4種電機的模糊綜合評價結果Table 5 Fuzzy comprehensive evaluation result of four kinds of motors
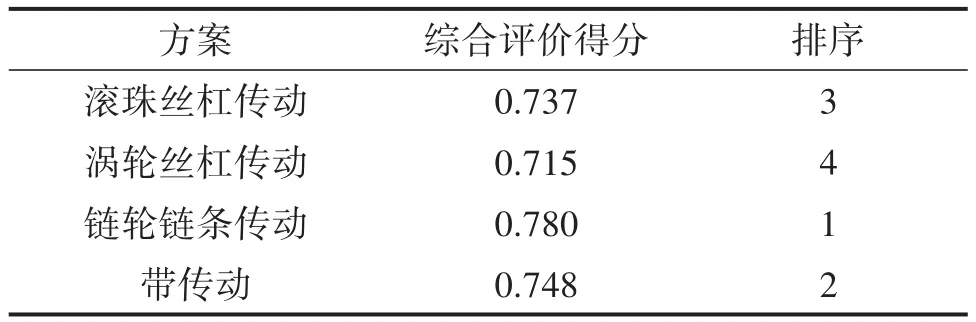
表6 4種傳動方式的模糊綜合評價結果Table 6 Fuzzy comprehensive evaluation result of four kinds of transmission modes
2 山地物探電動鉆機安全性分析
山地物探電動鉆機的作業環境十分惡劣。在多種復雜因素的綜合影響下,鉆機的受力和運動十分復雜,其工作可靠性降低,甚至可能不能正常作業[18],及發生漏電等安全事故。因此,開展山地物探電動鉆機的安全性分析尤為重要。
2.1 電動鉆機結構的安全性分析
2.1.1 電動鉆機仿真模型的建立
1)模型簡化。
根據電動鉆機的結構,利用Creo軟件進行建模和裝配。為便于分析和計算,去除無影響的螺栓和螺母。利用ANSYS軟件中的Space Claim填實圓孔,對復雜零部件中無影響或影響較小的特征如倒角、圓角等進行簡化。
2)材料定義。
電動鉆機機械結構的材料為45鋼。其密度為7 890 kg·m-3,彈性模量為 2.09×105MPa,泊松比為0.269,抗拉強度σb=600 MPa,屈服強度σs=355 MPa。
3)網格劃分。
采用自由網格劃分。對桅桿、拉桿、π形底盤的網格進行細化,其網格大小為8 mm,其他部分的網格大小為30 mm。鉆機整體網格劃分的平均質量評價值為0.87,共劃分為599 423個節點、298 329個單元。
4)邊界條件設置。
將與地面接觸的4個π形底盤支腿的腳座設置成固定約束;在旋轉裝置處的鉆桿平面設置接觸力,最大提升力F=7 kN;在旋轉裝置處的鉆桿表面設置扭矩,最大扭矩T=600 N·m。
構建的山地物探電動鉆機仿真模型如圖3所示。
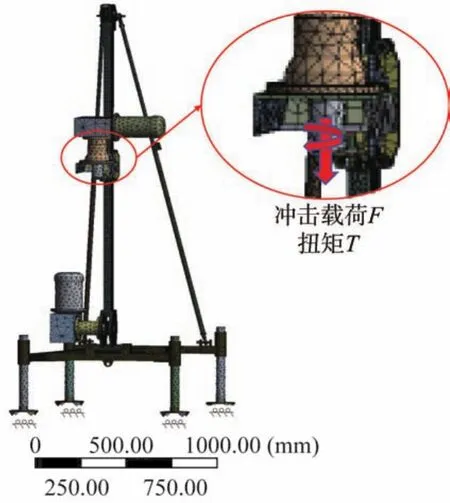
圖3 山地物探電動鉆機仿真模型Fig.3 Simulation model of mountain geophysical electric drilling rig
2.1.2 電動鉆機鉆井仿真結果的分析
利用ANSYS軟件進行有限元仿真,仿真后山地物探電動鉆機的變形如圖4所示。由圖可知,鉆機在鉆井作業過程中的變形呈從上至下逐漸遞減,最大變形出現在桅桿上部和旋轉裝置的電機處,其次是桅桿中上部和旋轉裝置除電機外的部分,再次就是桅桿下部和提升裝置,變形最小的是4條支腿,其幾乎沒有變形。
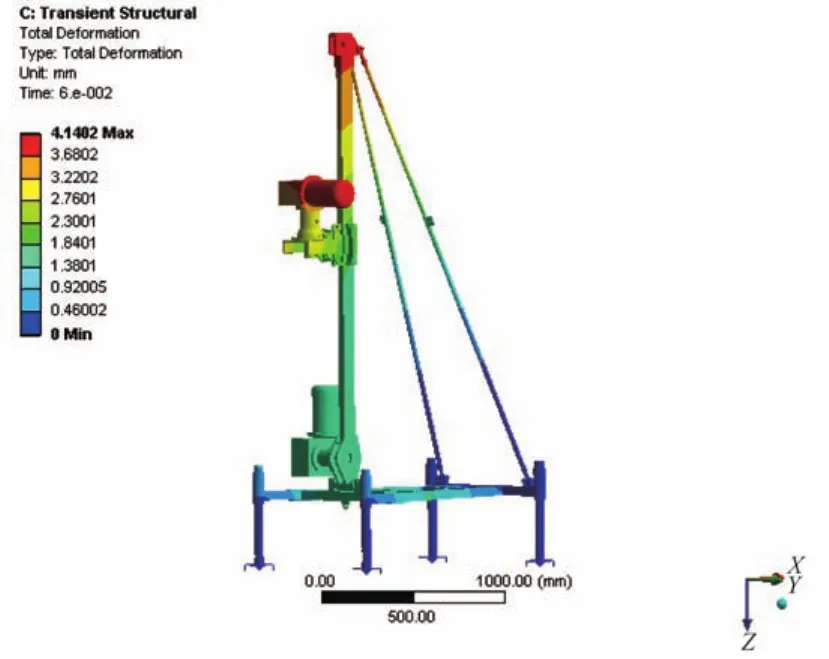
圖4 山地物探電動鉆機變形云圖Fig.4 Deformation nephogram of mountain geophysical electric drilling rig
山地物探電動鉆機應力云圖如圖5所示。由圖可知,應力主要集中在π形底盤底架、底盤支腿、桅桿以及旋轉裝置與桅桿的連接處。其原因是:電動鉆機整體的重量主要由π形底盤承擔;在載荷的作用下,旋轉裝置與桅桿連接處會有應力產生;旋轉裝置沿桅桿上下移動,導致桅桿四側也有相應的應力產生。
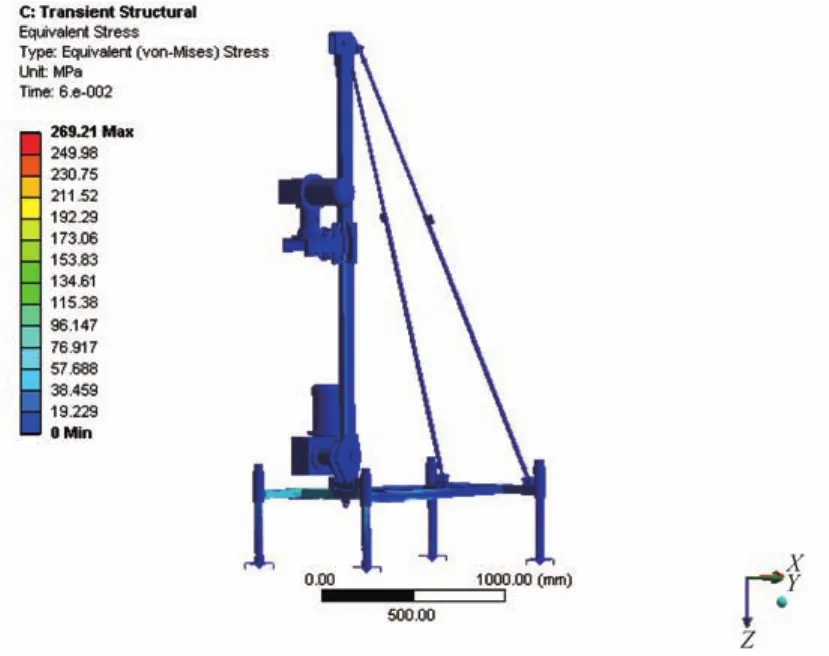
圖5 山地物探電動鉆機應力云圖Fig.5 Stress nephogram of mountain geophysical electric drilling rig
山地物探電動鉆機最大變形、最大應力隨時間的變化曲線分別如圖6、圖7所示。由圖可知,最大變形與最大應力的變化趨勢基本一致,呈現反復增大、減小的趨勢。可見在鉆井作業過程中工況較為復雜,對鉆機結構強度和剛度的要求較高。變形和應力均在0.06 s時達到最大值,此時最大變形量為4.14 mm,最大應力值為269.21 MPa。鉆機變形為彈性變形,其最大應力值小于鉆機材料的許用應力,故鉆機的強度和剛度符合要求,設計的鉆機結構是安全的。
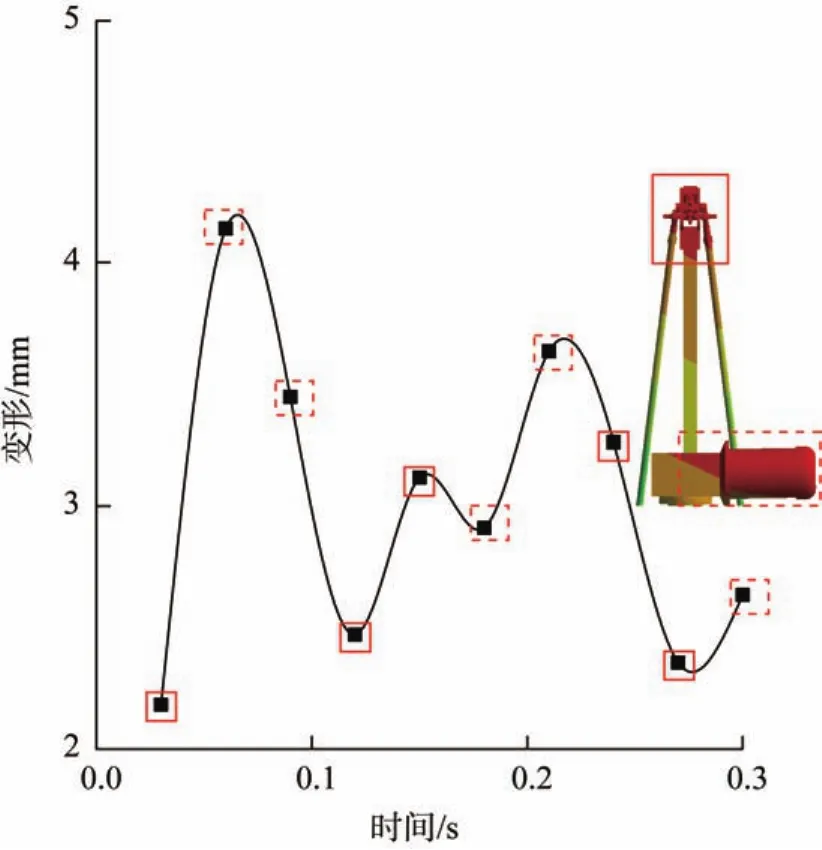
圖6 山地物探電動鉆機最大變形隨時間的變化曲線Fig.6 Variation curve of maximum deformation of mountain geophysical electric drilling rig with time
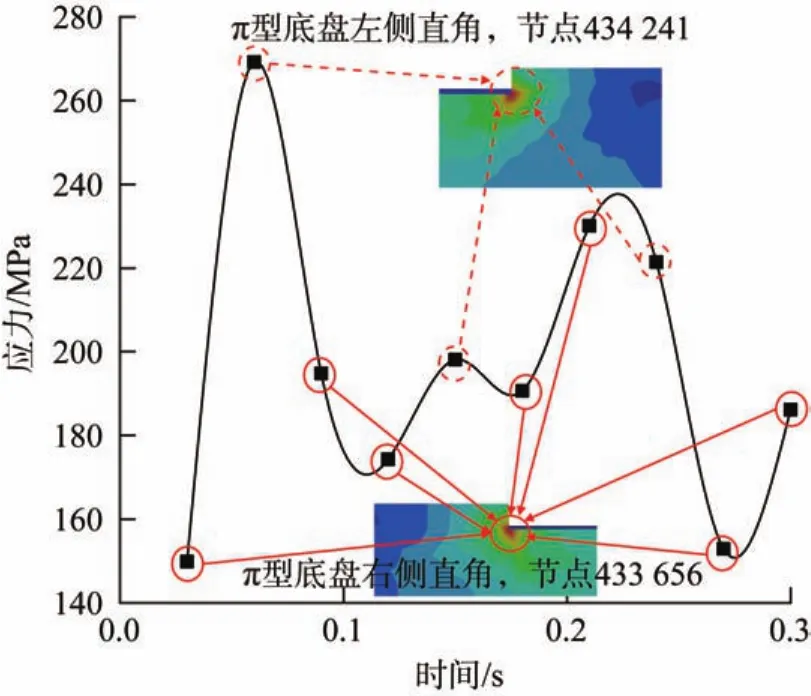
圖7 山地物探電動鉆機最大應力隨時間的變化曲線Fig.7 Variation curve of maximum stress of mountain geophysical electric drilling rig with time
2.2 電機電路的安全性分析
電動鉆機的電機為大電壓小電流,且設有多功能無觸電保護器,具有屏蔽泄漏電流、電子波、噪聲、靜電、落雷以及抑制電器起火的功能。
當電路出現短路、過流、過壓、欠壓、輸入和輸出缺相時,電路驅動器會自我保護而自動停止工作;當電流過載時,電機自動停止工作;當電機過熱時,控制系統會發生報警。電機電路中設有制動回路,具有制動管過載保護和制動電阻保護功能。如果瞬間斷電,即當電源電壓出現瞬間消失或瞬間掉落的情況時,電機電路可以保持母線電壓,不會出現欠壓故障,電機的輸出也不會停止。
3 山地物探電動鉆機的鉆井試驗
為了測試山地物探電動鉆機的性能,進行了鉆井實驗。實驗現場如圖8所示。鉆機分為π形底盤、提升裝置、旋轉裝置、桅桿-導向裝置-拉桿四個模塊,每個模塊的質量小于50 kg,整機質量小于150 kg,模塊之間大多采用銷軸連接,組裝十分快捷。

圖8 山地物探電動鉆機鉆井實驗現場Fig.8 Drilling test site of mountain geophysical electric drilling rig
通過電動鉆機鉆井實驗,得出:在鉆井過程中,提升裝置的提升與下降速度為0.3 m/s,最大提升力能夠達到24 kN;在正常鉆進的情況下,鉆桿下降的速度較小,所需的提升力較小;旋轉裝置的旋轉速度能夠達到200 r/min,在卡鉆時其扭矩能夠達到640 N·m,可以提供足夠的旋轉扭矩來解決卡鉆的問題。鉆機在鉆井過程的提升力和扭矩遠遠超過野外勘探鉆井所要求的提升力(7 kN)和扭矩(600 N·m)。
此外,將雞和魚作為實驗活物,開展鉆機電機電路的漏電保護實驗。實驗結果表明,在電機電路的安全性保護下,漏電電流對雞和魚的生命沒有造成影響,故電機電路漏電不會威脅工作人員的生命安全,電機電路是安全可靠的。
在整個實驗過程中,鉆機沒有因為受到鉆井過程中的沖擊載荷和扭矩而出現振動大、強度不足以致失效等情況。通過實驗可知:1)自主設計的山地物探電動鉆機實現了輕量化、模塊化和搬運的便利性;2)鉆機結構以及電機電路的設計合理,安全可靠;3)鉆機在鉆井過程中噪聲低,沒有尾氣排放,改善了操作工人的工作環境;4)鉆機可提供的最大提升力和扭矩遠遠超過設計標準,達到了野外勘探鉆井的要求。
4 結論
1)以電能驅動代替燃油機驅動,設計了山地物探電動鉆機模塊化方案。基于模糊綜合評價法優選驅動電機和傳動方式,確定了驅動電機為永磁同步電機,傳動方式為鏈輪鏈條傳動,同時通過對比優選出減速器、支撐部件和導向部件分別為渦輪蝸桿減速器、π形底盤和單桅桿。
2)采用有限元分析方法進行了鉆機的安全性分析,得出鉆機最大變形位于桅桿上部和旋轉裝置的電機處,最大應力出現在π形底盤連接桅桿的直角處。最大應力小于鉆機材料的許用應力,設計的鉆機結構是安全的。
3)開展了鉆機鉆井實驗和漏電保護實驗。結果表明:自主設計的山地物探電動鉆機較現有山地物探鉆機質量減小了57%,達到了輕量化、模塊化的設計要求;鉆機在鉆井時噪聲低,沒有尾氣排放,符合綠色環保的要求;鉆井時可以提供的最大提升力和扭矩分別超過設計標準的71%和6.25%,完全達到了野外勘探鉆井的標準要求。因此,該電動鉆機設計合理,安全可靠,具有廣闊的應用前景。
