基于亮度優化的綠色隧道照明模糊PID控制算法
2022-05-06 06:22:40王海英毛明磊
隧道建設(中英文) 2022年4期
關鍵詞:優化
王海英, 毛明磊,*, 何 佳
(1. 長安大學工程機械學院, 陜西 西安 710064; 2. 陜西交通控股集團有限公司,陜西 西安 710054)
0 引言
隧道是公路網絡中重要的組成部分,截至2020年末,我國公路總長達519.81萬km,其中隧道總長達2 199.93萬延米[1-2]。隧道照明系統是隧道系統中必不可少的一部分,在隧道運營電費中,有80%的費用用于支付隧道中的照明用電[3]。目前,隧道照明控制大多按照《公路隧道照明設計細則》[4]采用分段固定照明亮度值的方法對燈具進行調光控制,因此,對隧道內部照明系統進行綠色節能控制,解決照明系統能耗高的問題,減少隧道日常運營開支是實現綠色節能的重要環節。
目前,國內外學者對隧道照明節能控制的研究主要集中在降低照明亮度需求和根據隧道內部車流量變化建立照明調光控制策略2個方面,旨在實現按需照明,避免無車或者車流量較小情況下的電能浪費。在降低照明亮度需求方面,Pea-Garcia等[5]和陸遠迅等[6]分別采用在隧道入口周圍種植常青藤或在隧道入口及出口處加裝遮光棚,并在遮光棚內布置基本照明設施的方法,降低隧道出入口處環境亮度值以降低隧道內部照明亮度需求。張德錢等[7]利用Matlab對隧道內部各段照明亮度折減系數進行擬合以降低照明亮度需求。Yang Chao等[8]及秦慧芳等[9]建立了以隧道外部亮度、車流量及車速為輸入,以隧道各段照明強度需求值為輸出的模糊神經網絡模型,對照明亮度需求進行優化。在考慮車流量變化建立照明調光控制策略方面,Qin Li等[10]及何威等[11]提出了“車進燈亮,車走燈滅”的控制策略,能在車流量較小時實現無車關燈,節省能源。秦莉等[12]及杜冠峰等[13]分別提出了以隧道內感知的車輛和亮度信息為輸入,以隧道內部控制亮度為輸出的PID調光控制系統和模糊PID調光控制系統,用于提高隧道燈具的調光速率,實現節能減排。
上述研究中,照明需求亮度的取值遵照《公路隧道照明設計細則》[4]的規定。根據規定,各個照明段的隧道照明亮度折減系數K按照固定區間對照取值設定,沒有考慮與隧道內部車流量、車速之間的實時對應關系。此外,在燈具調光控制方面,不管是模糊控制還是PID控制,均采用車流量、實際亮度等環境指標作為輸入量對燈具進行調光控制,僅考慮了控制目標的響應速度,而忽略了控制目標本身隨著車速及車流量的實時變化特性。
本文針對隧道內部照明亮度需求值精細化控制問題,優化基于隧道內部車流量與車速的照明亮度折減系數K計算方法,得到按需照明亮度計算公式及控制目標值,并設計以控制目標差值與差值變化率為輸入的模糊PID調光控制模型,精確控制隧道照明,同時在實際隧道中進行應用驗證和行車安全驗證,以期為更高效地實現隧道照明綠色節能控制提供一定的技術支撐。
1 綠色隧道照明控制系統
本文提出的綠色隧道照明控制系統原理如圖1所示。照明控制系統由數據采集、數據處理與燈具控制3個模塊組成。數據采集模塊通過現場安裝的隧道內外部亮度檢測器、隧道車流量與車速傳感器獲取隧道內外部實時亮度值、進入隧道的車輛數量以及車速。各傳感器通過RS 485總線與數據采集器相連接,并將所采集的數據傳輸至數據處理模塊。數據處理模塊的核心為現場安裝的工控機,工控機根據測得的實時車流量、車速與隧道外部環境亮度值,并結合亮度折減系數K的優化取值方法來計算出隧道內部各段按需照明強度值,最后利用自適應模糊PID控制方法得到燈具的調光控制參數,對燈具進行調光控制。模糊控制器的輸入為隧道內部各段實時亮度值與按需照明控制亮度值的偏差值與其偏差值變化率,輸出PID控制參數Kp、Ki與Kd的變化量至PID控制模塊,輸出燈具的PWM脈沖信號至燈具控制模塊的調光控制器。燈具控制模塊由燈具調光控制器和隧道內部各段燈具組成,調光控制器根據接收的控制信號來對燈具進行調光,對隧道內部各段燈具進行綠色按需照明控制。
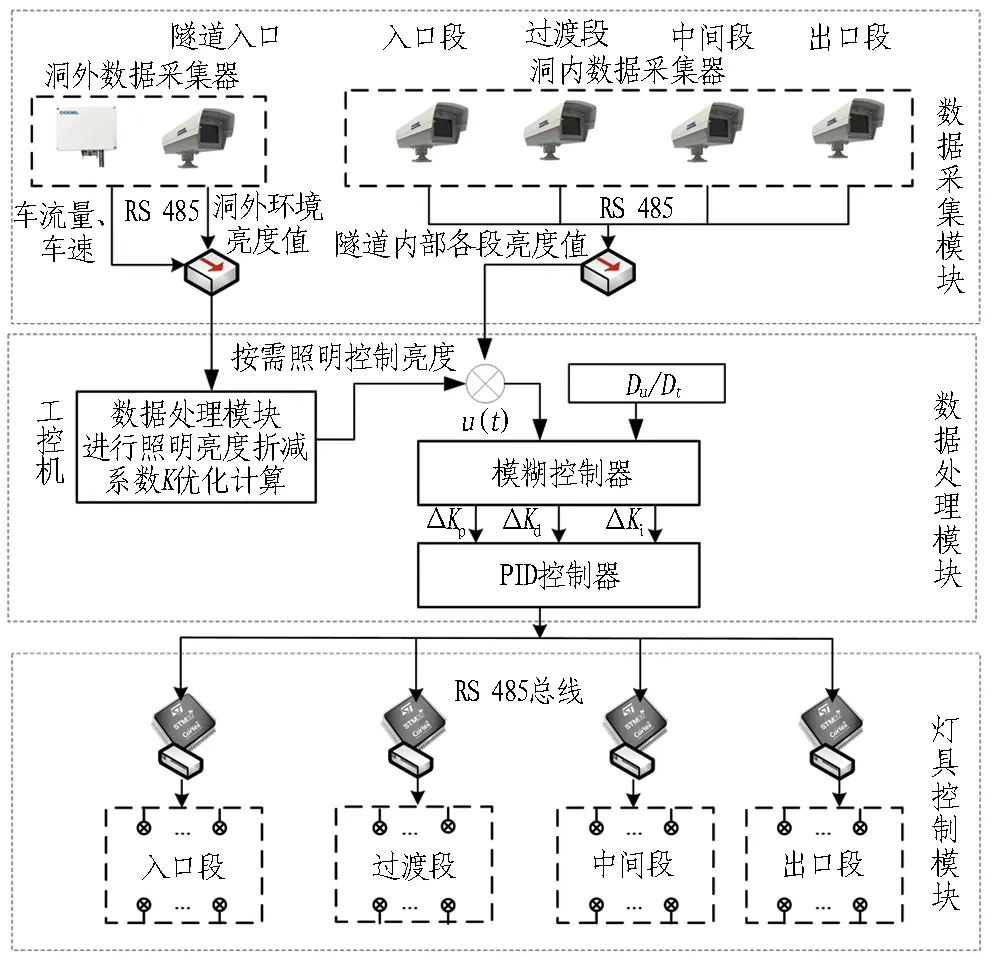
圖1 綠色隧道照明控制原理
2 基于亮度折減系數K的按需照明亮度優化
《公路隧道照明設計細則》[4]中對于隧道內部各段照明亮度的設計分段如圖2所示。細則中將隧道照明劃分為入口段照明(TH1、TH2)、過渡段照明(TR1、TR2和TR3)、中間段照明(TN)以及出口段照明(EX1與EX2)4部分,其照明亮度要求分別為Lth、Ltr、Lin、Lex。
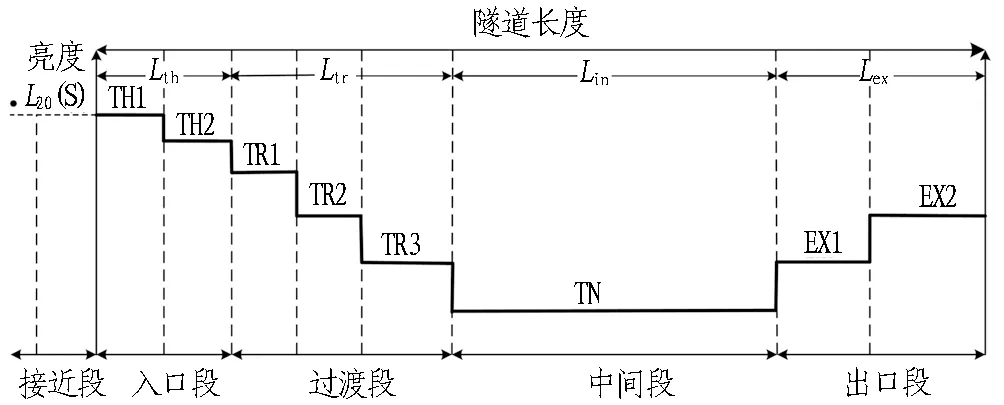
圖2 隧道照明系統設計分段
2.1 入口段照明亮度優化
根據《公路隧道照明細則》[4],入口段亮度為入口段亮度折減系數K與洞外亮度的乘積。亮度折減系數K的取值如表1所示。
Lth1=K×L20(S) ;
(1)
Lth2= 0.5×K×L20(S)。
(2)
式(1)—(2)中:L20(S)為洞外亮度;Lth1為入口段TH1的亮度,cd/m2;Lth2為入口段TH2的亮度,cd/m2。
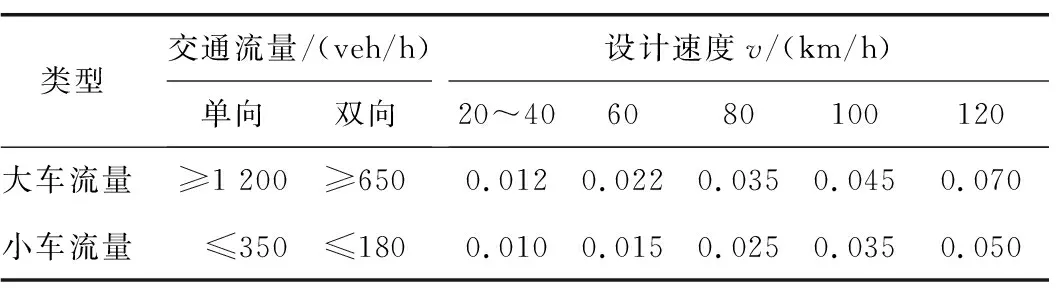
表1 不同車流量及速度下亮度折減系數K的取值
由表1可知,K按照設計交通流量和設計車速分段取值,并沒有考慮實時車流量以及車速情況下K值的變化。因此,本文提出亮度折減系數K的線性擬合與線性內插取值相結合的優化方法,分別對實時車速及實時車流量下的K值進行優化,得到按需照明亮度控制指標,從而實現照明節能。
首先,根據表1中的已知數據,使用Matlab軟件對大車流量和小車流量2種情況下不同實時車速的入口段亮度折減系數K進行線性擬合,得到2種車流量對應的入口段亮度折減系數KH和KL的擬合曲線方程,如式(3)和式(4)所示。不同交通流量下優化后的入口段亮度折減系數K與設計值對比見圖3。由圖3可知,擬合后的亮度折減系數值小于細則中的規定值。
KH=6.25×10-9v4-1.875×10-6v3+2.037×
10-4v2-8.875×10-3v+ 0.145。
(3)
KL=2.604×10-9v4-8.333×10-7v3+9.896×
10-5v2-4.667×10-3v+ 0.085。
(4)
式(3)—(4)中v為車輛速度,km/h。
式(3)和式(4)僅考慮了大車流量和小車流量2種情況下亮度折減系數與車速之間的關系,但對于中間車流量的不同未做區別。因此,進一步根據照明設計細則中車流量的設計取值,采用線性內插擬合法對處于中間的實時車流量所對應的亮度折減系數進行優化,如式(5)所示。
(5)
式中:N為實際車流量,veh/h;NL為實際車流量所屬區段的小車流量,veh/h;NH為實際車流量所屬區段的大車流量,veh/h。
將K代入式(1)和式(2)可以得到入口TH1、TH2段的照明亮度:
(6)
(7)
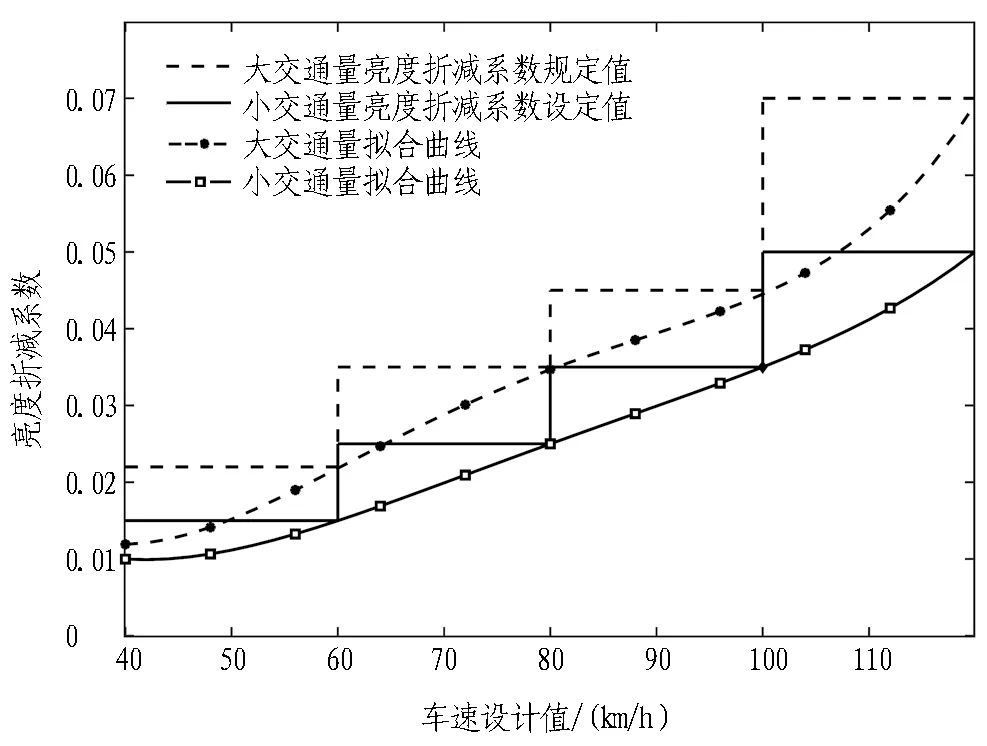
圖3 不同車速與車流量下入口段亮度折減系數K的擬合曲線
2.2 過渡段照明亮度優化
《公路隧道照明細則》[4]規定,隧道過渡段照明亮度與入口TH1段照明亮度成比例關系,TR1段比例因子為0.15,TR2段為0.05,TR3段為0.02。在設計時,首先進行入口段亮度折減系數K的優化,然后通過比例因子計算隧道過渡段照明亮度。
2.3 中間段照明亮度優化
《公路隧道照明細則》[4]規定,中間段的照明亮度根據車速和車流量進行固定取值。與入口段類似,細則規定了不同設計車流量與車輛速度下的燈具照明亮度值,因此采用和入口段相同的擬合方法對中間段照明亮度進行優化。首先,利用曲線擬合方法,根據車速確定照明亮度;然后,利用線性內插取值法,根據實時車流量計算中間段按需照明亮度。中間段照明亮度優化擬合曲線如圖4所示。
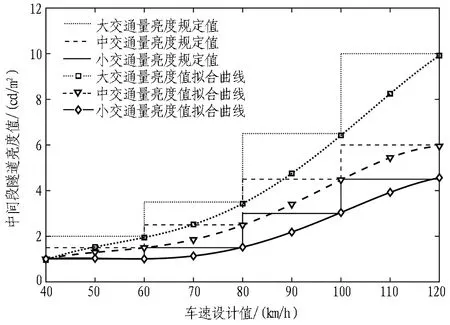
圖4 不同車速與車流量下中間段的亮度值擬合曲線
不同車流量及車速的中間段照明亮度計算公式為
(8)
式中:LinH為中間段大車流量對應的照明亮度,cd/m2;LinL為中間段小車流量對應的照明亮度,cd/m2。
2.4 出口段照明亮度優化
《公路隧道照明細則》[4]規定,隧道出口段照明亮度與中間段照明亮度成比例關系,出口段1的比例因子為3,出口段2為5。設計時,首先進行中間段照明亮度優化后,再進行出口段按需照明亮度計算。
3 綠色隧道照明模糊PID控制算法及仿真
綠色隧道照明模糊PID控制器原理如圖5所示。控制器的輸入量為根據實時車流量、車速以及洞外環境亮度值計算出的按需照明亮度值,輸出及反饋輸入量為隧道內部安裝的亮度傳感器所采集到的隧道內部實際照明亮度值。計算輸入量和反饋輸入量的偏差值u(t)以及偏差值的變化率Du/Dt,將二者作為模糊控制器的輸入量。PID控制器的3個參數為Kp、Ki、Kd,Kp為比例因子,影響控制系統調節速度的快慢;Ki為積分算子,目的是使系統消除穩態誤差;Kd為微分算子,反映系統偏差信號的變化率,可以產生超前的控制作用。根據PID控制的3個參數Kp、Ki、Kd與偏差值u(t)以及偏差值的變化率Du/Dt之間的模糊關系,在運行時不斷檢測u(t)和Du/Dt,利用模糊推理的方法,在線輸出Kp、Ki、Kd參數對應的變化量ΔKp、ΔKi、ΔKd,對PID控制器的3個參數進行自整定,然后利用模糊整定后的參數對進行隧道內部各段燈具進行PID控制調光。
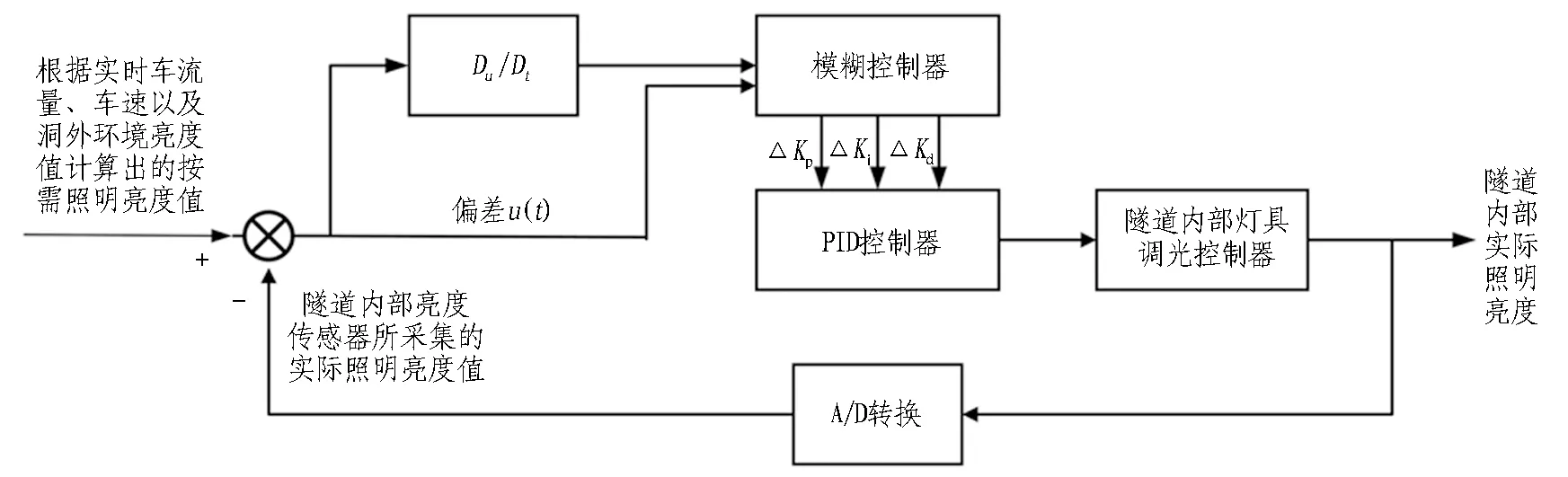
圖5 綠色隧道照明模糊PID控制器原理
3.1 模糊PID控制算法
模糊控制器用于對PID控制器的控制參數Kp、Ki、Kd進行自適應調整整定。進行計算時,首先對模糊控制器的輸入進行模糊化,建立隸屬度函數,確定各個模糊量之間的對應關系;其次,進行模糊推理規則設定;最后,進行模糊仿真,輸出模糊整定后的ΔKp、ΔKi、ΔKd參數。
3.1.1 模糊化
模糊化是指經過對專家知識的利用,控制系統的被控量將輸入的清晰量進行尺度變換,使其能夠與各自的論域范圍相匹配,從而實現模糊控制的一種控制方法[14]。
對輸入變量的模糊化,首先需要確定偏差值u(t)與偏差值變化率Du/Dt的模糊論域。本文依托工程的隧道入口處的L20(S)值在白天時約為3 500 cd/m2,單向交通流情況下,根據式(5)可以計算出當車速為80 km/h時入口段的亮度折減系數K約為0.034 7,由式(6)計算出隧道入口段照明亮度Lth1為121.45 cd/m2。故設定偏差值u(t)的論域為[-120,120],在模糊控制中將其離散化為[-120, -80, -40 , 0, 40, 80, 120]。設定偏差值變化率Du/Dt的論域為[-60 , 60],PID控制器的參數修正量ΔKp、ΔKi、ΔKd的論域為[-3, 3]、[-3, 3]、[-0.3, 0.3]。

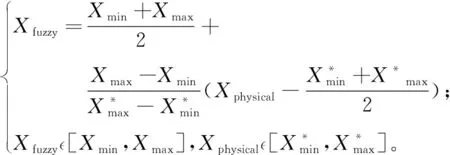
(9)
本文將模糊控制器Xfuzzy輸入和輸出劃分為7個模糊子集{NB,NM,NS,ZO,PS,PM,PB}(即{負大,負中,負小,零,正大,正中,正小})。通過計算可以將實際的輸入量與輸出量轉換為模糊輸入或輸出的模糊變量。
3.1.2 隸屬度函數的建立
符合工程實際的隸屬度函數可以充分發揮模糊控制方法的優勢,通常采用專家經驗法來構造隸屬度函數[15]。本文根據專家經驗構造出隸屬度函數,模糊輸入偏差值u(t)以及Du/Dt的隸屬度函數如圖6所示。
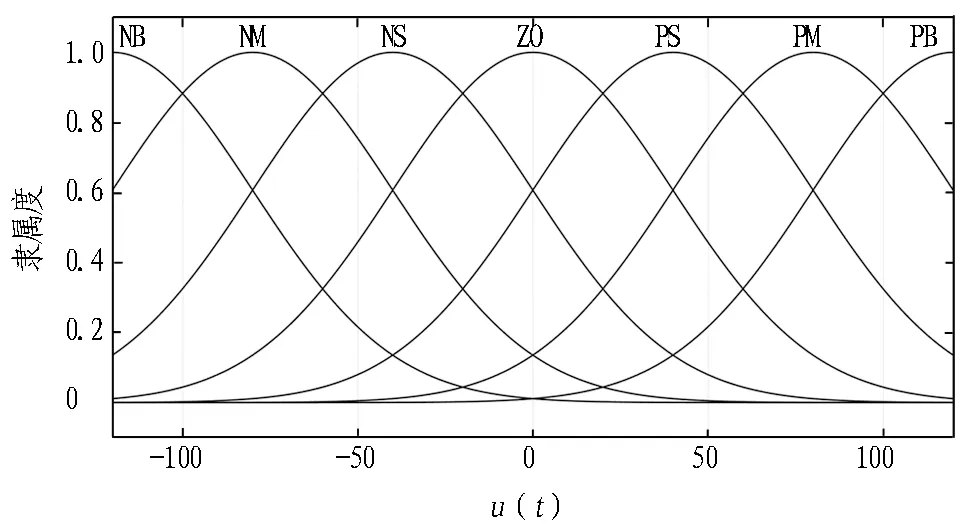
(a) u(t)隸屬度函數(b) Du/Dt隸屬度函數
3.1.3 設定模糊推理算法
在完成隸屬度函數的設定后,根據專家經驗來設定模糊規則。模糊控制器的輸出為ΔKp、ΔKi、ΔKd,即PID控制的3個參數變化值。當u(t)較大時,為使系統具有良好的跟蹤性能,在模糊控制中可以先增加Kp用于增大系統調節速度,減小Kd避免系統震蕩,同時為避免系統響應的超調量,對積分算子Ki進行限制;當u(t)處于中等大小時,為使系統響應具有較小的超調,可以先減小Kp用于減小系統調節速度,Kd的取值影響較大,應減少增量避免系統震蕩,同時積分算子Ki取值要適當;當u(t)較小時,為使系統響應具有較好的穩定性能,Kp、Ki取值均應增加,同時為避免系統震蕩,Kd取值要適當,當Du/Dt比較大時,Kd減小。根據上述3個參數的特性及經驗,設定模糊控制規則如表2所示。
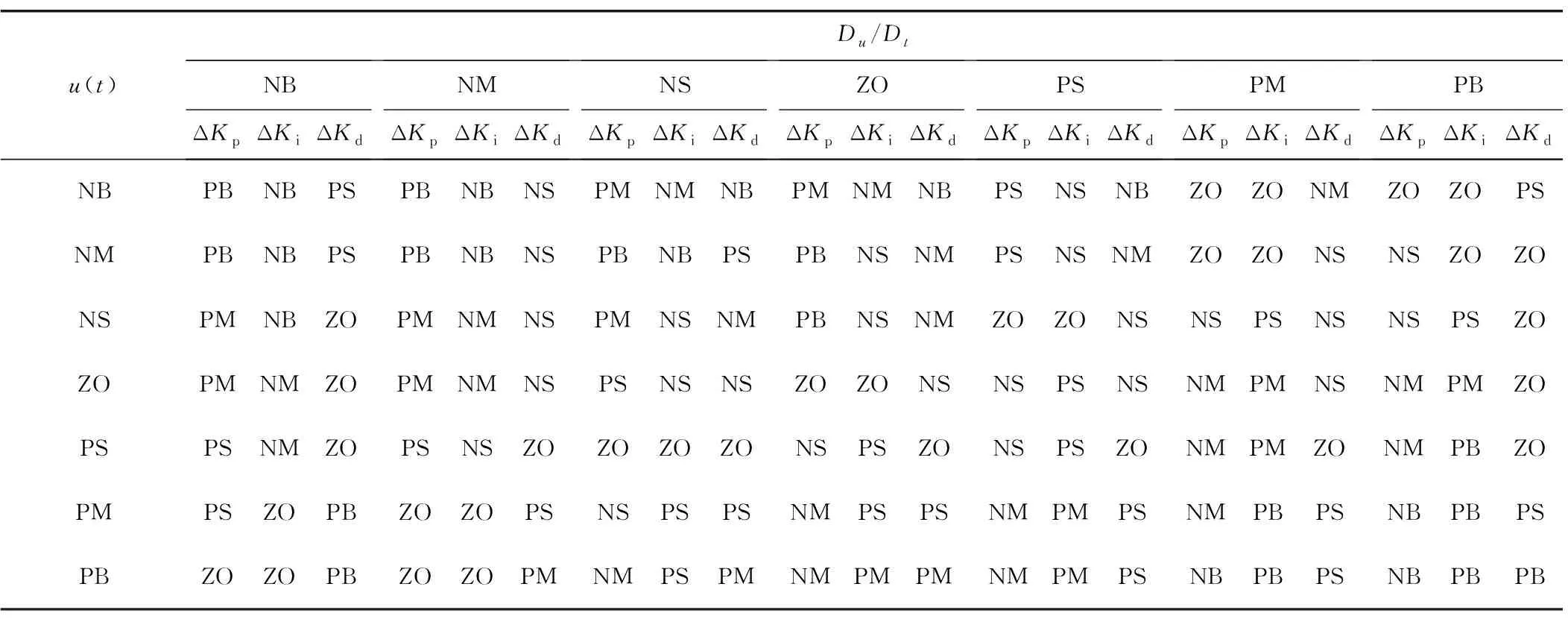
表2 模糊控制規則
3.2 模糊仿真
利用Matlab軟件對表2的模糊控制規則進行編程,計算得到ΔKp、ΔKi、ΔKd的模糊推理量;然后,采用重心法解可以模糊得到三者的精確量并用于PID控制。ΔKp、ΔKi、ΔKd的仿真輸出結果,如圖7所示。
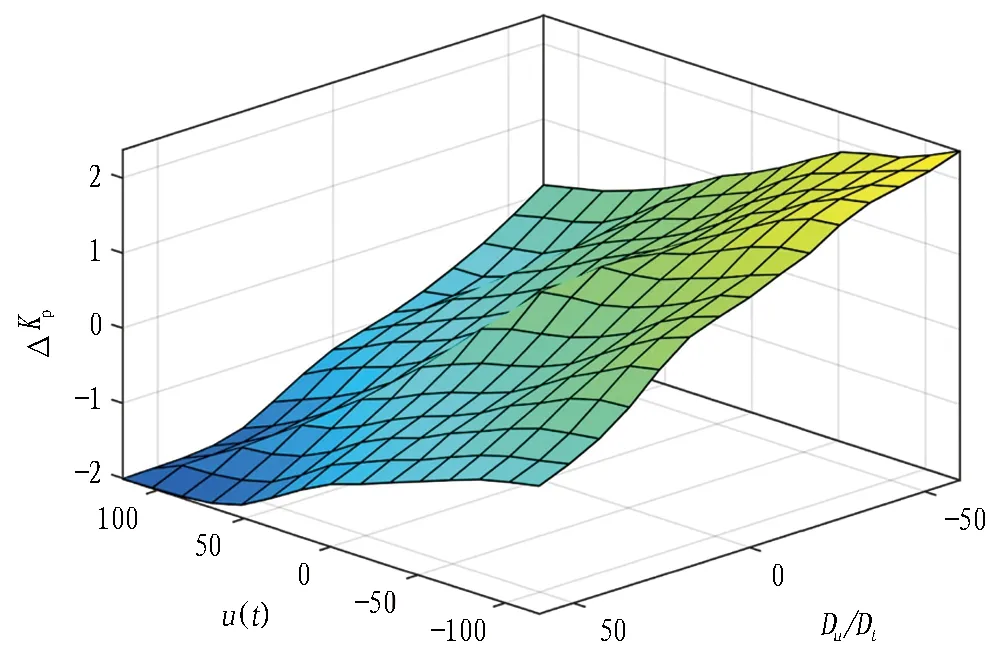
(a) ΔKp的仿真輸出
4 照明控制節能效果分析
4.1 節能效果分析
本文提出的基于亮度折減系數K優化的自適應模糊PID控制設計方法已于2020年1月在某高速公路隧道實施應用。該隧道全長2 205 m,雙向6車道,設計速度120 km/h,2洞燈具采用對稱布置,隧道內部的加強照明、基本照明和應急照明均采用LED燈具。隧道各段長度劃分如表3所示。

表3 隧道內部各段長度
4.1.1 照明亮度值分析
首先,對入口段Lth1的照明亮度值進行對比分析,進一步根據照明亮度值進行節能效果分析。由于雙向通行的隧道左、右洞照明存在著時間與方向上的不同,即同一隧道的左、右洞在相同時間存在著光照角度、車流量與車速之間的差異,因此,本文通過對比隧道單側洞按照《公路隧道照明設計細則》和本文提出的基于亮度折減系數K優化方法計算的入口段Lth1照明亮度值的差值來分析節能效果。收集2020年1月10日—14日5 d的隧道洞外亮度L20(S)、通過隧道車輛車速以及車流量3個數據。5 d內隧道外部亮度的24 h檢測平均值和隧道各時間段的平均車流量及平均車速如圖8和圖9所示。通過采集到的環境數據分別按《公路隧道照明細則》和基于亮度折減系數K優化后的方法計算入口段Lth1的照明亮度值,2種控制方法的照明強度對比如圖10所示。
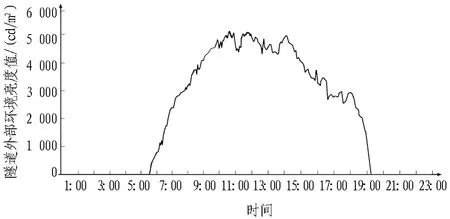
圖8 隧道外部亮度均值曲線(2020年1月10日—14日)
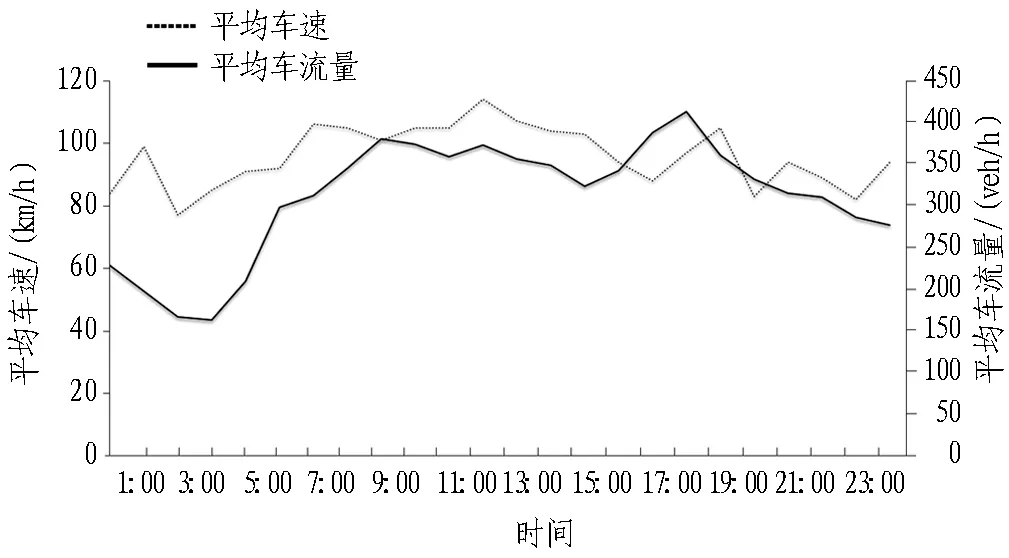
圖9 隧道平均車流量與平均車速曲線(2020年1月10日—14日)
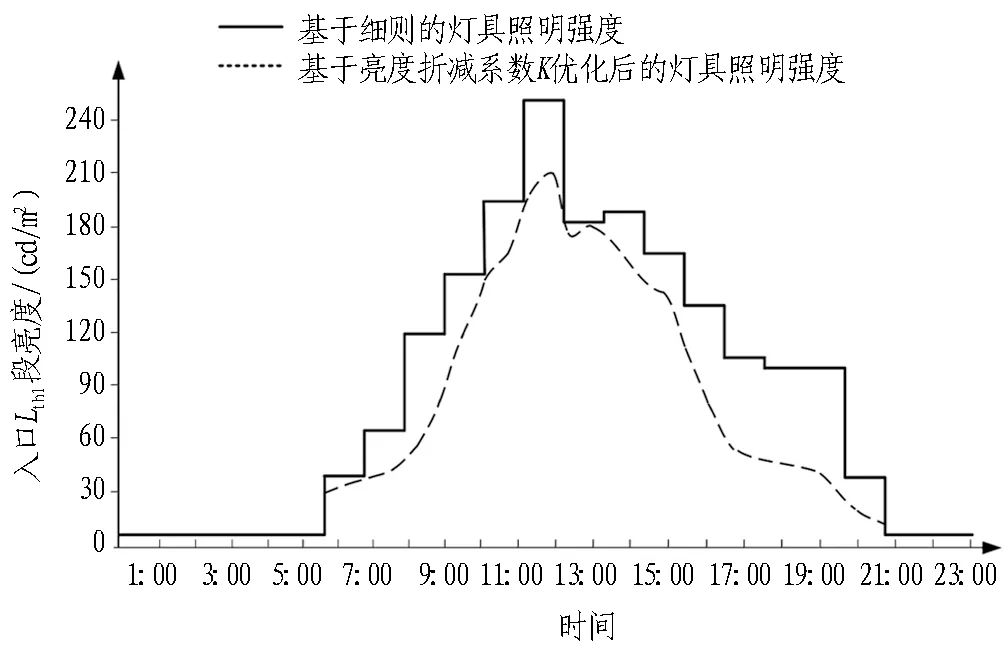
圖10 2種控制方法的照明強度對比
由圖10可知,本文提出的基于亮度折減系數K優化方法可以使隧道入口段Lth1的照明強度降低約26.7%,實現了節能的目的。
4.1.2 照明系統耗電量分析
隧道內部各段燈具布置數量及燈具相應功耗如表4所示。為評價照明節能效果,本文對采用基于亮度折減系數優化K的自適應模糊PID控制前、后的照明系統耗電量進行對比分析。2020年1月10日—14日,隧道內采用本文提出的優化控制方法進行燈具照明控制,并統計每日照明系統的耗電量。基于細則的隧道內部燈具照明強度需求值如圖10所示,對應表4中的燈具類型及能耗,計算出在按細則規定下的隧道照明系統日耗電量。將計算出的日耗電量與隧道內部實際日耗電量進行對比,分析照明系統的節能效果。
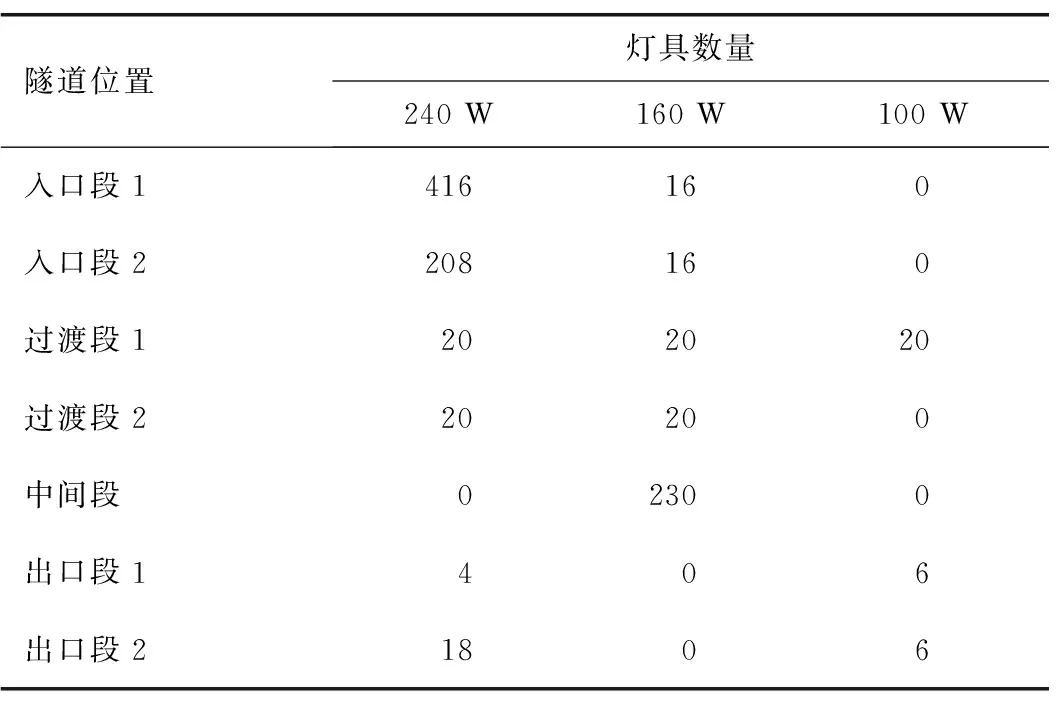
表4 隧道內部燈具功率及其數量
2020年1月10日—14日,隧道單側洞的日耗電量對比情況如圖11所示。可以看出,在舍棄原有的根據細則規定的控制方法轉而采用按需調光的模糊PID控制方法后,5 d平均耗電量節約了約21.2%,可以有效降低隧道照明系統的耗電量,節能效果明顯。以上表明,本文提出的基于亮度優化的綠色隧道照明模糊PID算法效果良好。
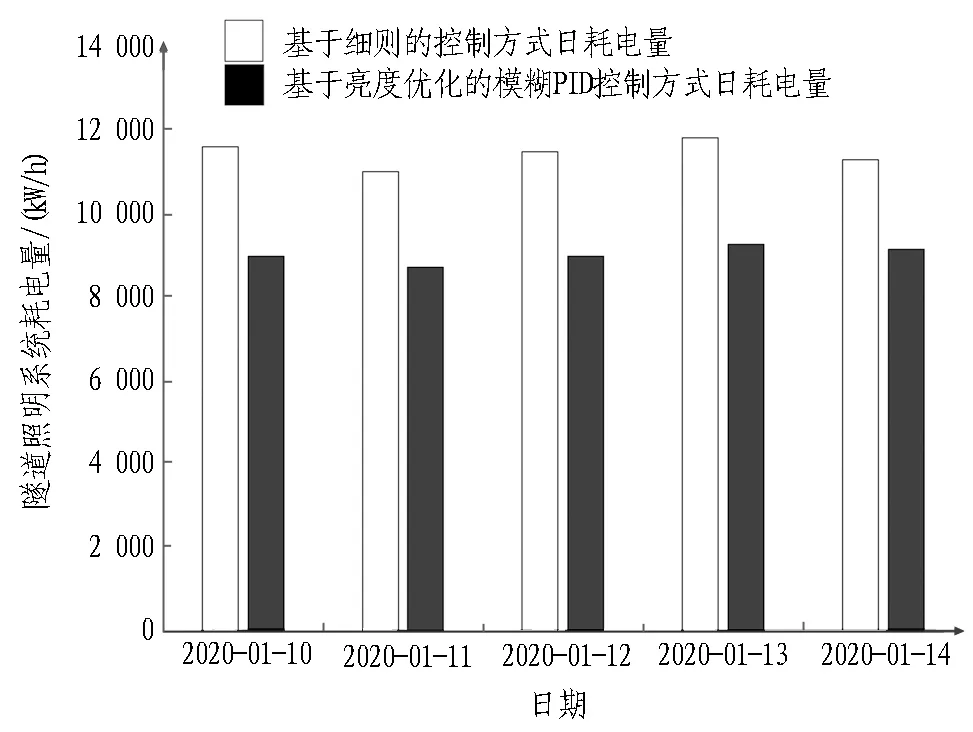
圖11 隧道照明系統耗電量對比
4.2 照明系統安全性驗證
由于本系統對隧道內部照明進行適配性修改后,隧道內部照明亮度相應地有所降低,因此對隧道系統駕駛安全性進行驗證,以驗證本照明系統的照明亮度是否達到安全行車要求。
由文獻[16]可知,駕駛員瞳孔面積變化率U的取值標準為: 1)舒適時U≤20%; 2)較為緊張時20%
根據文獻[17]可知,U、K、v3者的關系為
U=-2.86+0.051 06v+276.8K-0.000 209 6v2-4.673vK-
1 783K2+0.020 1v2K+13.73vK2+4 121K3。
(11)
式中v取車輛在隧道入口段速度的平均值。
由式(11)可以計算出在不同設計車速下,U的安全閾值為20%時的亮度折減系數K的取值下限,如表5所示。
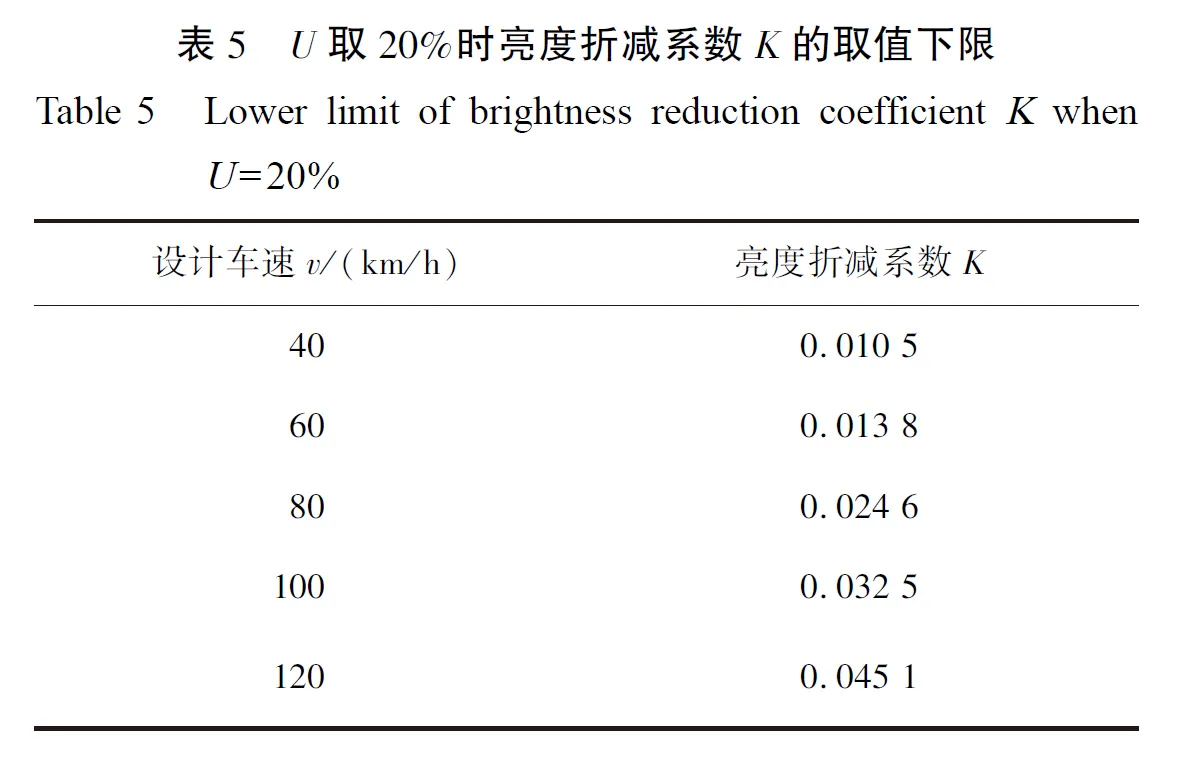
將表5與圖3中數據進行對比,如圖12所示。可以發現亮度折減系數K優化取值后仍然滿足安全閾值U取為20%的閾值下限,因此可以認為亮度折減系數K優化取值后,仍可以滿足隧道內部安全行車的前提。
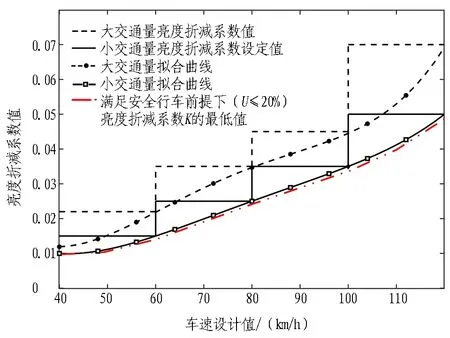
圖12 U取20%時亮度折減系數K
5 結論與建議
本文提出了一種基于亮度優化的綠色隧道照明模糊PID控制算法以實現隧道照明節能控制,并進行了照明控制節能效果驗證分析,得到以下結論:
1)利用曲線擬合法和內插法,提出一種根據實時車流量和車速優化隧道照明亮度折減系數K的計算方法,得到隧道內部各照明段亮度折減系數K的擬合曲線和計算公式,實現了隧道按需照明亮度值的精細化設定。該優化計算的照明亮度需求值小于細則規定的照明亮度,隧道入口段Lth1的照明強度需求降低約26.7%。
2)設計以優化后的照明亮度需求為控制目標,以照明需求設定值與實際亮度差值u(t)與亮度差值變化率Du/Dt為輸入的模糊PID控制器,實現照明精準控制。現場應用驗證表明,5 d平均耗電量節約21.2%,且可以保證安全行車。
本文的研究成果主要在高速公路隧道進行了驗證應用,后續可在照明亮度優化基礎上進行不同照明控制算法方面的研究,以期獲得更好的照明節能控制效果。同時,可以進一步在不同長度、不同斷面寬度的隧道實踐中對本文方法進行驗證,以得到更全面、客觀的照明節能數據,進一步推動隧道綠色照明的設計。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45