新型水下負壓-電磁吸附清洗機器人結構方案設計*
2022-05-05 00:59:16瞿思涵顧宇琳
南方農機 2022年9期
關鍵詞:船舶
瞿思涵 ,趙 淼 ,顧宇琳 ,朱 慧
(南通理工學院電氣與能源工程學院,江蘇 南通 226000)
由于船舶長時間在海洋環境下工作,而且許多船舶都是由金屬材料制成,所以表面易遭受海水鹽堿的侵蝕以及難以清除的海底海洋生物的附著。海洋生物的附著污損問題嚴重限制了船舶行業的發展,船舶的航行速度會因此出現顯著性的下降,為保持原有航速,油量也會明顯增多,從而大幅度提高船舶的運輸成本,加大營運成本。因此,水下清理船體表面作業刻不容緩。目前,市場上較為廣泛的船體表面清刷主要有塢內清刷和水下清刷,但其缺點也較明顯。塢內清刷較易增加船舶的停航損失,造成環境的二次污染;人工水下清刷則會耗費大量人力資源等,成本較高,且具有較高的風險[1]。因此,結合國內船舶清理工作現狀,為了能夠高效率、低成本地有效清理船體表面,設計一種新型水下負壓-電磁吸附清洗機器人。
1 總體方案
1.1 整體結構
該機器人的基本結構包括基板、轉動機構一、轉動板、空化射流噴頭、抽氣管、轉動機構二、移動機構和電磁吸附塊等[2]。該結構以基板為主體,轉動機構一設在基板兩側,轉動板則連接在兩個轉動機構一之間,空化射流噴頭以陣列方式設置在基板一側的安裝板上。端部設有喇叭狀柔性圈的抽氣管通過轉動連接在基板上的通孔二中,轉動機構二則連接在抽氣管和基板之間。移動機構滑動安裝在滑槽中[3],移動機構上連接著電磁吸附塊,空心立方體結構的電磁吸附塊,其內部空腔中設置有電磁線圈[4]。基本結構示意圖,如圖1、圖2所示。
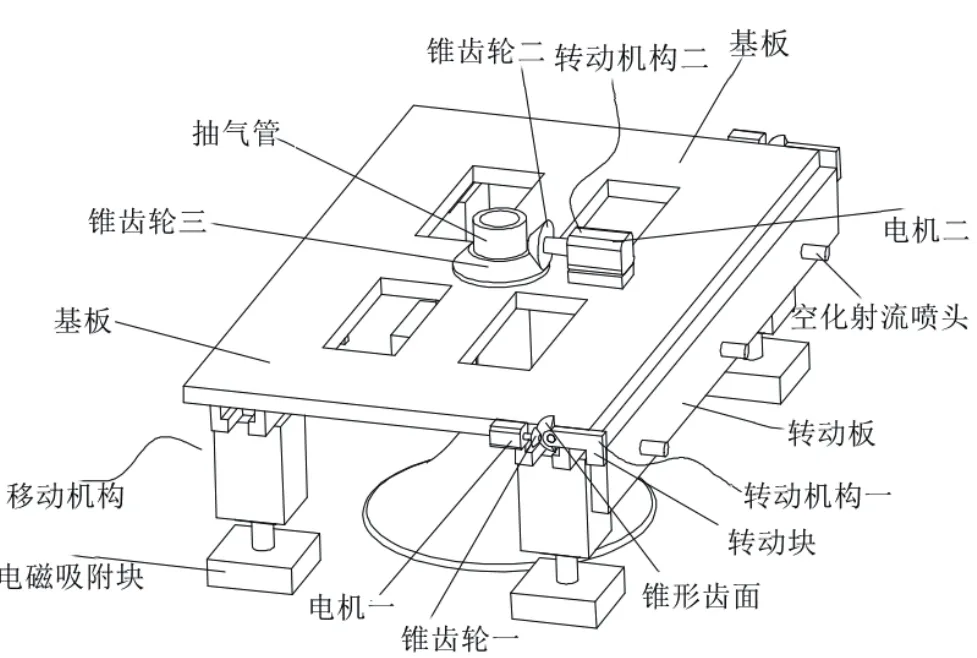
圖1 基本結構示意圖一
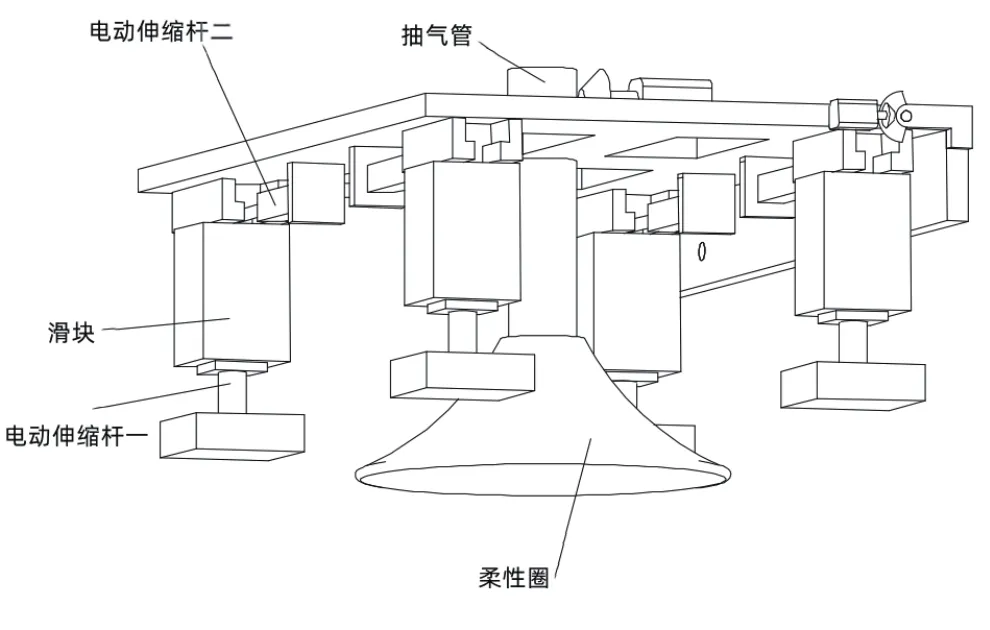
圖2 基本結構示意圖二
1.2 局部結構
1.2.1 基板
基板上陣列開有通孔一、通孔二位于基板中心部位,基板表面還陣列設置有四個滑槽和四個擋板,基板兩側設置有轉動機構一,兩個轉動機構一之間則由轉動板連接。空化射流噴頭陣列設置在安裝板上,并與輸送空化射流的管道相連[5]。端部設有喇叭狀柔性圈的抽氣管連接在通孔二中,并與抽氣泵相連,轉動機構二則連接在抽氣管和基板之間。電磁吸附塊為空心立方體結構,其內部空腔中設置有電磁線圈,它連接在移動機構上,移動機構滑動安裝在滑槽中。基板結構圖如圖3所示。
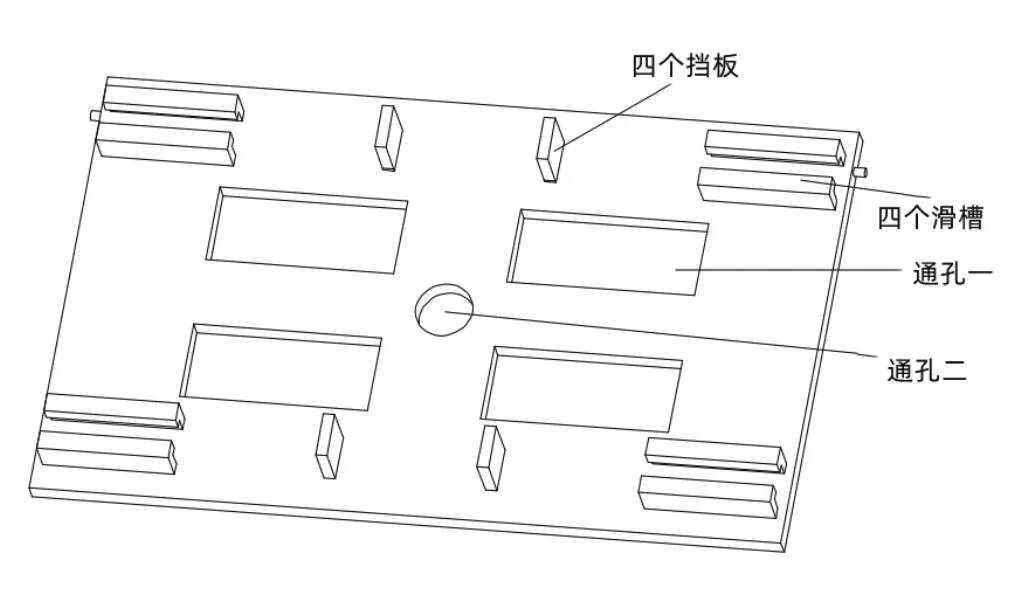
圖3 新型基板的結構圖
1.2.2 轉動機構一
轉動機構一中包括電機一、錐齒輪一和轉動塊[6]。電機一連接在基板的側面上,錐齒輪一連接在電機一的輸出軸上,轉動塊轉動連接在基板側面并與轉動板相連,轉動塊上有錐形齒面,錐齒輪一與錐形齒面相互嚙合。轉動機構一詳圖如圖4所示。
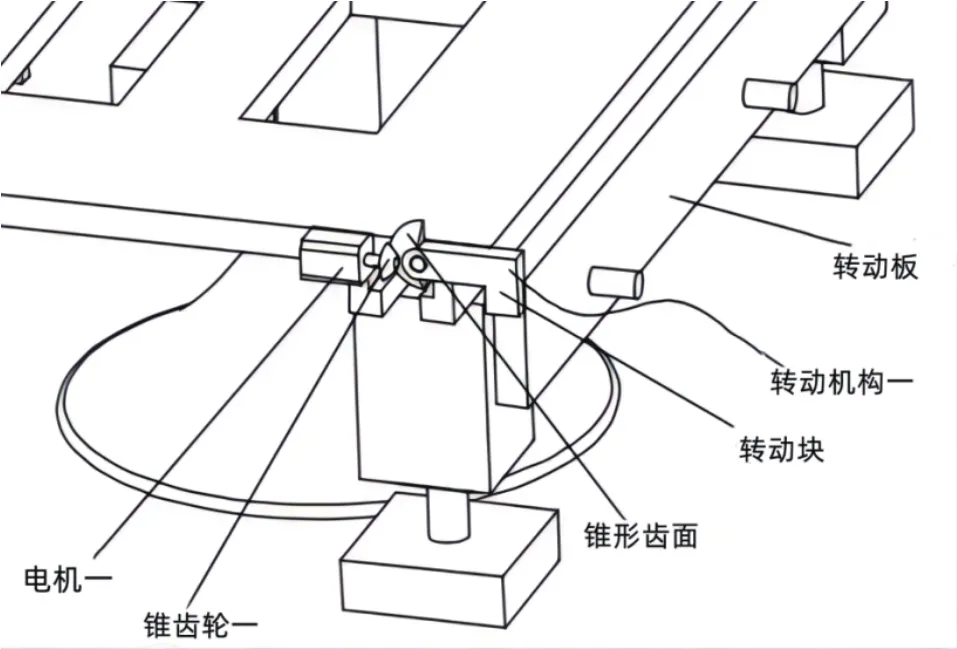
圖4 轉動機構一詳圖
1.2.3 轉動機構二
轉動機構二包括電機二、錐齒輪二和錐齒輪三。電機二連接在基板上,錐齒輪二連接在電機二的輸出軸上,錐齒輪三連接在抽氣管上且錐齒輪二和錐齒輪三相互嚙合。轉動機構二詳圖如圖5所示。
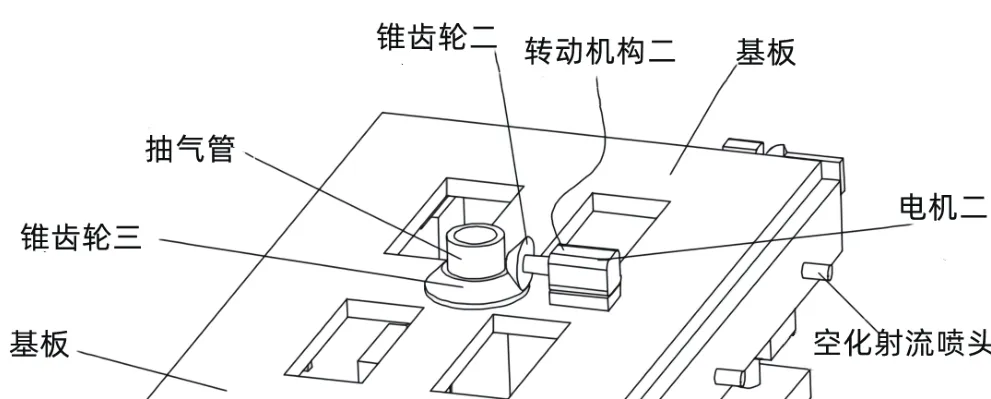
圖5 轉動機構二詳圖
1.2.4 移動機構
移動機構包括滑塊、電動伸縮桿一和電動伸縮桿二。滑塊滑動連接在滑槽中,滑塊的一端開有凹槽,則電動伸縮桿一固定在凹槽中[7],電動伸縮桿一的活動端與電磁吸附塊相連,電動伸縮桿二連接在擋板和滑塊之間。電磁吸附塊和滑塊的結構圖分別如圖6和圖7所示。
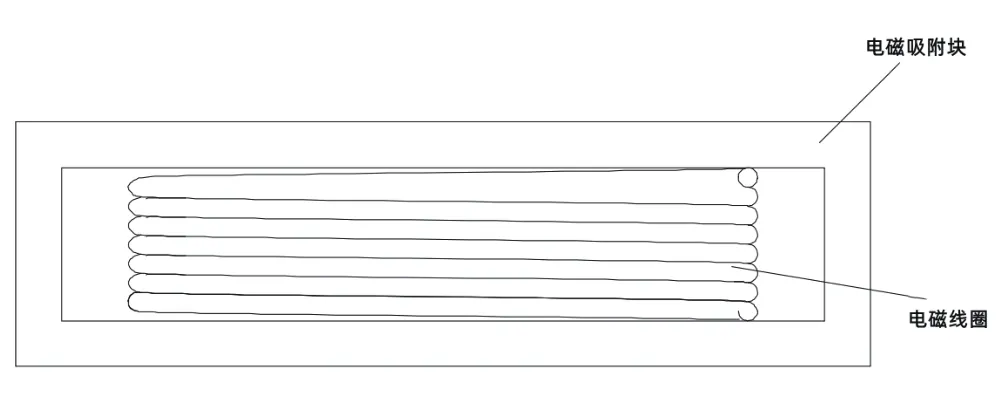
圖6 電磁吸附塊的結構圖
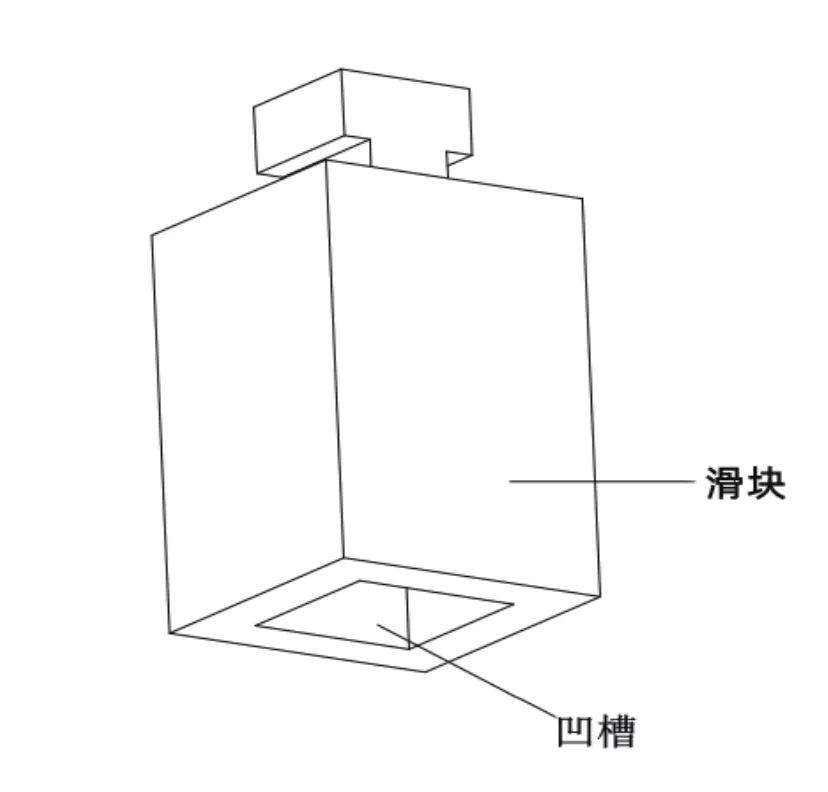
圖7 滑塊的結構圖
2 工作原理及過程
首先,通過使電磁線圈通電產生磁力,將機器人安裝在船體表面。機器人在船體表面移動主要依靠電動伸縮桿的收縮,排氣管對氣體的掌握,海水對柔性圈的壓力。因此,機器人移動時,操控電動伸縮桿二的縮回,直至柔性圈緊貼船舶表面,接著向排氣管中鼓氣,使排氣管中的海水排出,再從抽氣管中抽氣為其創造負壓環境[8]。與此同時,將電磁線圈斷電,通過海水對柔性線圈的壓力將機器人牢牢固定在船舶表面[9],然后縮回電動伸縮桿二,再啟動電動伸縮桿一移動電磁吸附塊,此刻再給電磁線圈通電產生相應的磁力將電磁吸附塊固定,消除排氣管中的負壓,繼續伸長電動伸縮桿二后伸長電動伸縮桿一完成基板的移動[10]。機器人轉動主要靠電機二啟動和氣管轉動,在氣管單獨負壓吸附時,啟動電機二,使基板圍繞排氣管進行一系列轉動,當到達工作區域后,機器控制空化射流噴頭,氣體從中噴出,并可以通過電機一來控制空化射流的方向。
3 新型水下負壓-電磁吸附清洗機器人結構優點
3.1 總體優點
新型水下負壓-電磁吸附清洗機器人無須讓船舶進入船塢,提高了船舶的利用率,大量節省了入塢的清潔費用,避免了傳統清刷技術而導致的二次污染問題;克服了水下人工清刷速度慢、勞動強度大和安全系數低等問題[11];采用了四條獨立的運動機構控制電磁吸附塊運動,能根據船舶表面的實際形狀進行調節,從而使得機器人能更有效地貼合在船體表面,不易脫落。
3.2 突出優點
1)通孔一的存在很大程度上減輕了機器人的自重,減小了機器人吸附所需的力量。
2)空化射流噴頭設置在機器人基板的一側,可以避免吸附結構吸附到船舶表面的海洋生物上而導致機器人脫落。
3)電磁吸附塊的底部可以添加一層柔性層,使得電磁吸附塊能夠與船體外表面更加貼合。
4)柔性圈呈喇叭狀更有利于和船體表面的貼合,從而保證抽氣管內部負壓環境更穩定。
4 結語
在未來很長一段時間,船舶水下清洗作業還有很長一段路需要走。利用新型水下負壓-電磁吸附清洗機器人,能夠較為高效、智能地完成船體表面的清理工作,機器人還可以根據不同船型的不同表面進行調整,以達到更契合船體表面的目的。除此之外,新型水下負壓-電磁吸附清洗機器人還可以應用到其他海上建筑的清潔中,比如跨海大橋、近海防護工程、海上燈塔等大型工程建筑,研究發展前景非常廣闊。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30