具阻尼廣義Korteweg-de Vries 方程的迭代學(xué)習(xí)控制*
2022-04-27 09:04:06范雄梅
火力與指揮控制
2022年3期
明 森,李 霞,范雄梅
(1.中北大學(xué)數(shù)學(xué)系,太原 030051;2.中北大學(xué)大數(shù)據(jù)學(xué)院,太原 030051)
0 引言
經(jīng)典的KdV 方程描述淺水中小振幅長(zhǎng)波的單向運(yùn)動(dòng),是一類分布參數(shù)系統(tǒng),即

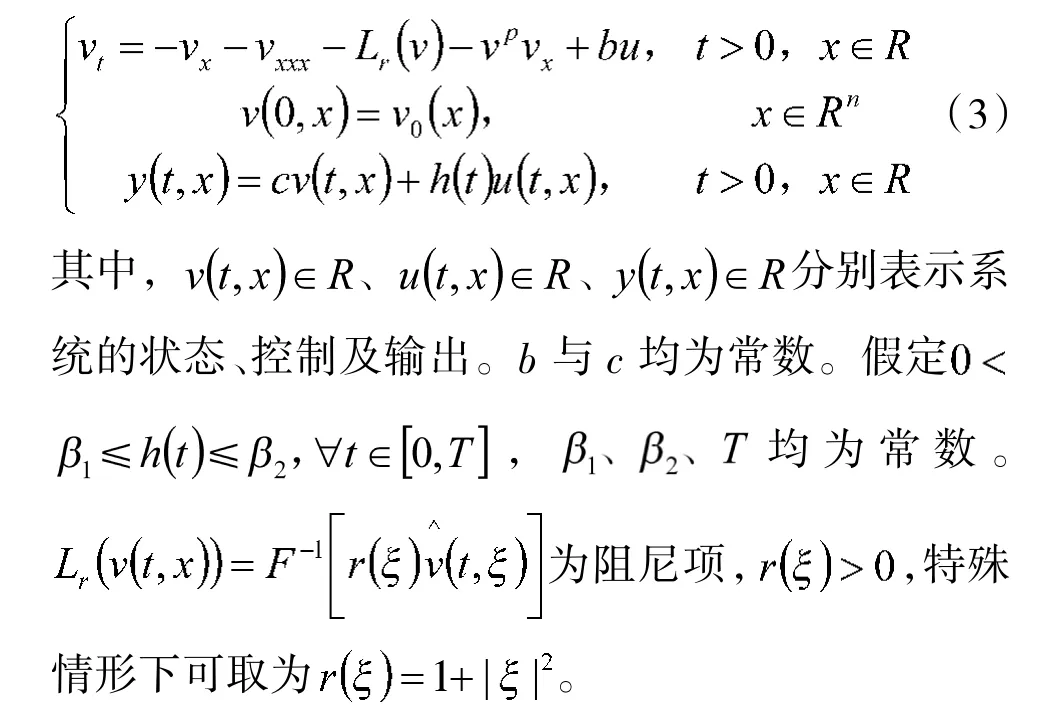
其中,v(t,x)是水波的高度。在現(xiàn)實(shí)情形,耗散效應(yīng)和非線性色散效應(yīng)對(duì)物理系統(tǒng)的影響同樣很重要。文獻(xiàn)[12]研究了一類具阻尼的廣義KdV 方程。
考慮到耗散效應(yīng)的影響,本文研究一類具阻尼廣義KdV 方程的控制問(wèn)題。
本文擬采用P 型學(xué)習(xí)律設(shè)計(jì)出迭代學(xué)習(xí)控制器,給出此分布參數(shù)系統(tǒng)迭代學(xué)習(xí)控制算法收斂的充分條件及數(shù)值實(shí)例。
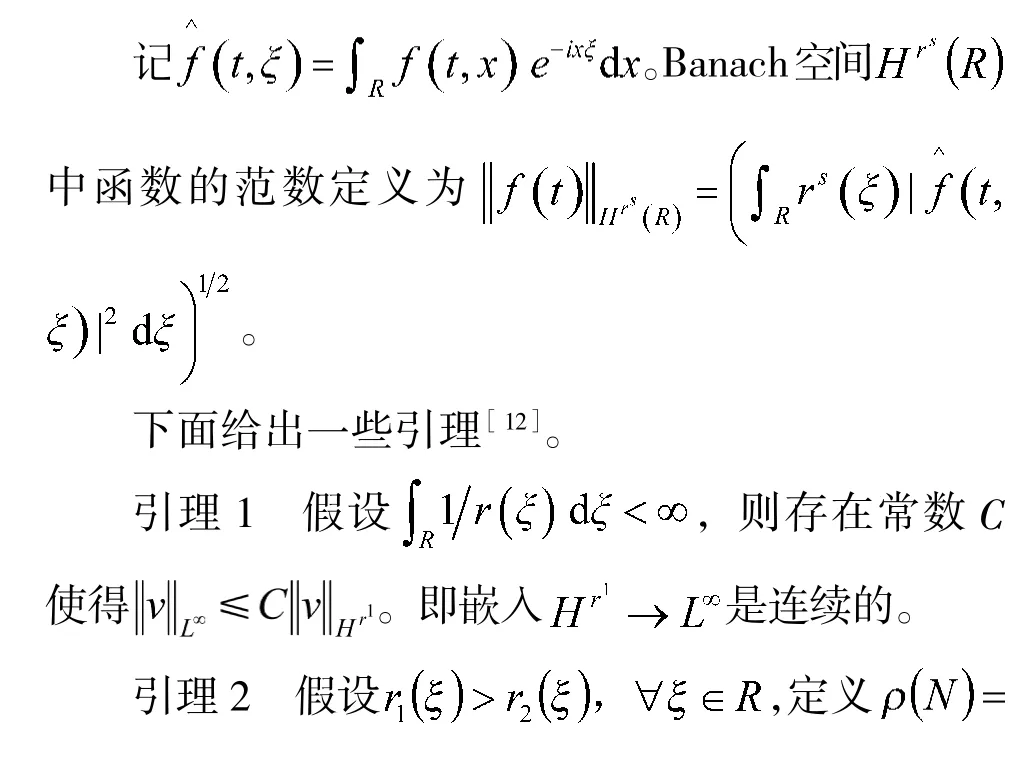
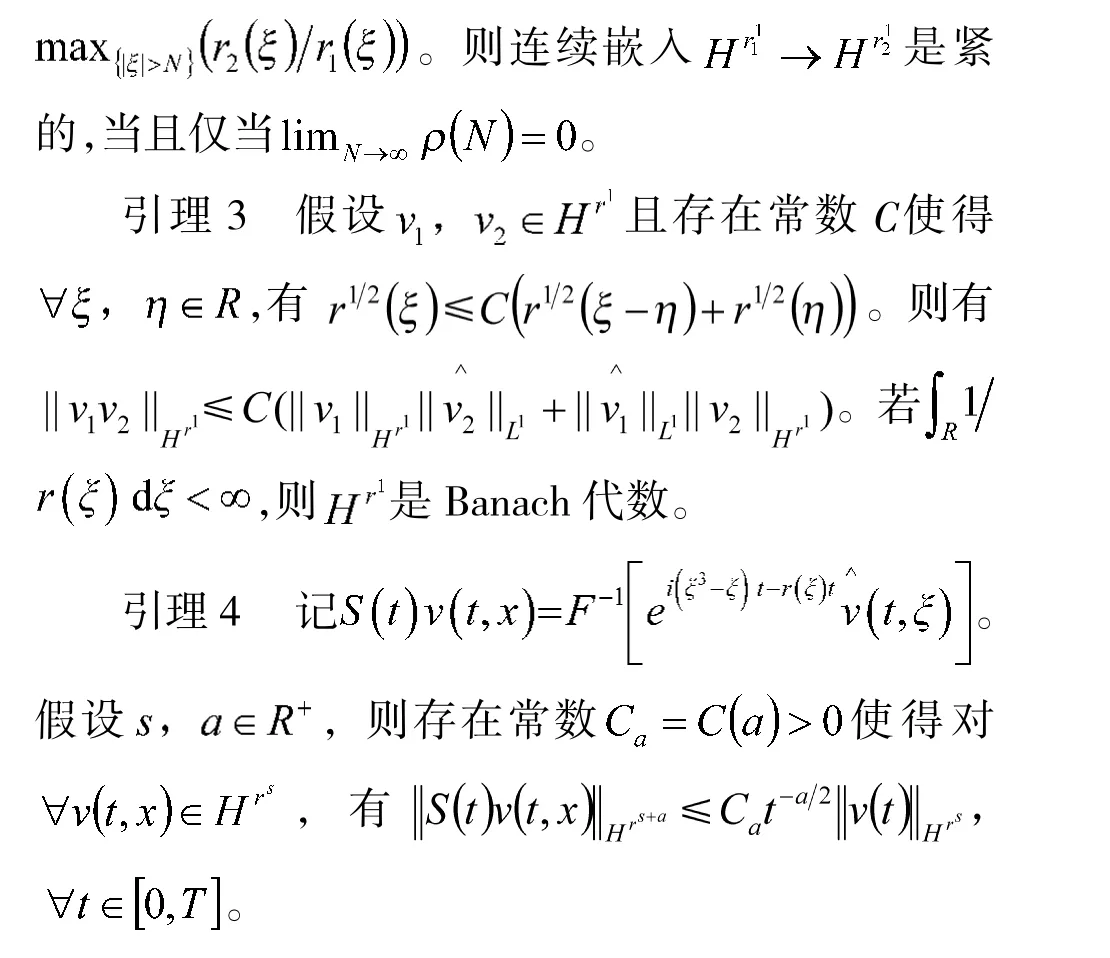
1 預(yù)備知識(shí)
2 局部適定性
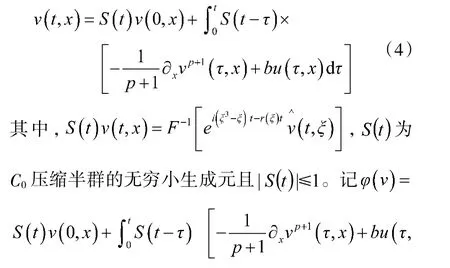
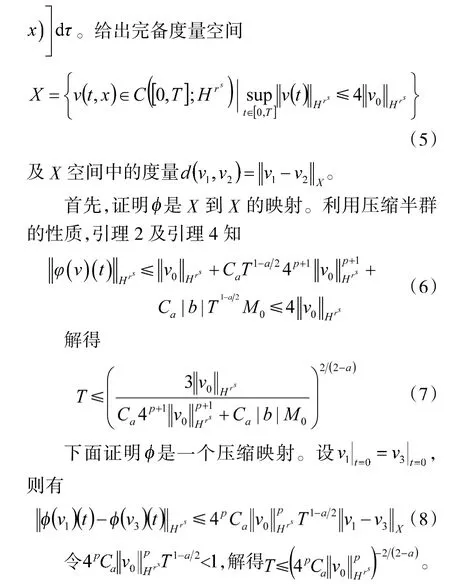
本節(jié)給出式(3)的局部適定性定理及證明。

證明 主要利用引理1~引理4 及文獻(xiàn)[12]給出定理1 的證明。利用半群理論,對(duì)于式(3),有
3 迭代學(xué)習(xí)收斂性分析
對(duì)于式(3),采用P 型迭代學(xué)習(xí)控制算法

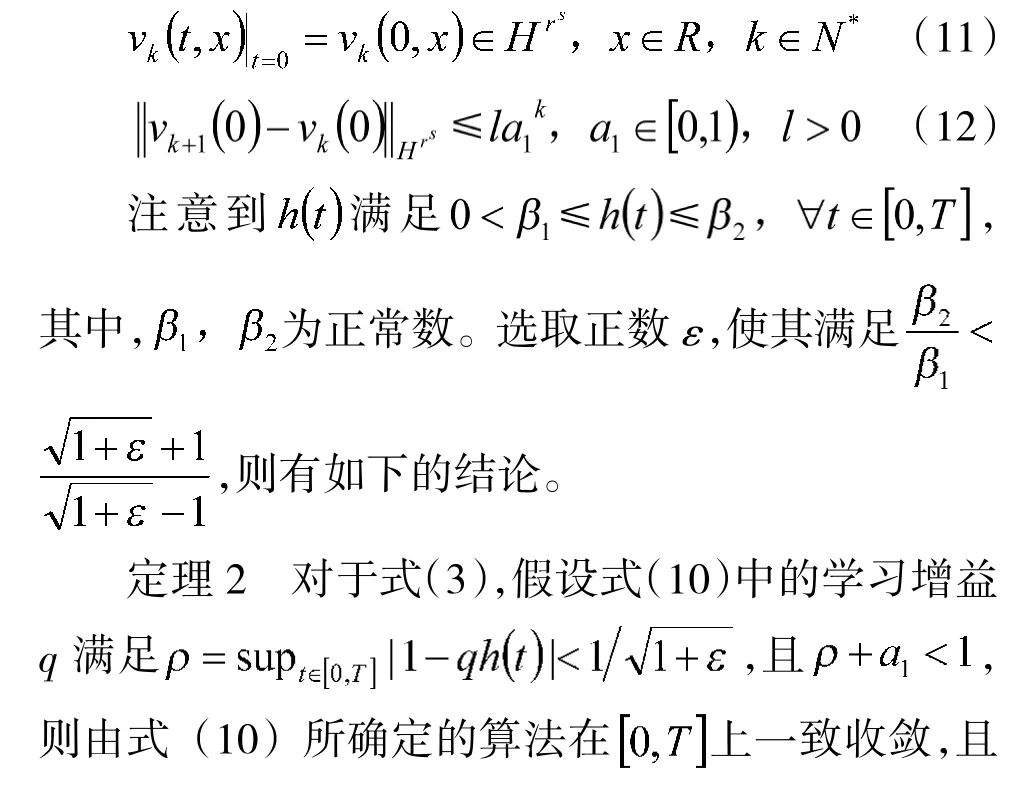
其中,k 表示迭代次數(shù),q>0 是待尋的學(xué)習(xí)增益。假設(shè)在迭代過(guò)程中系統(tǒng)的初始狀態(tài)允許存在一定的誤差,即
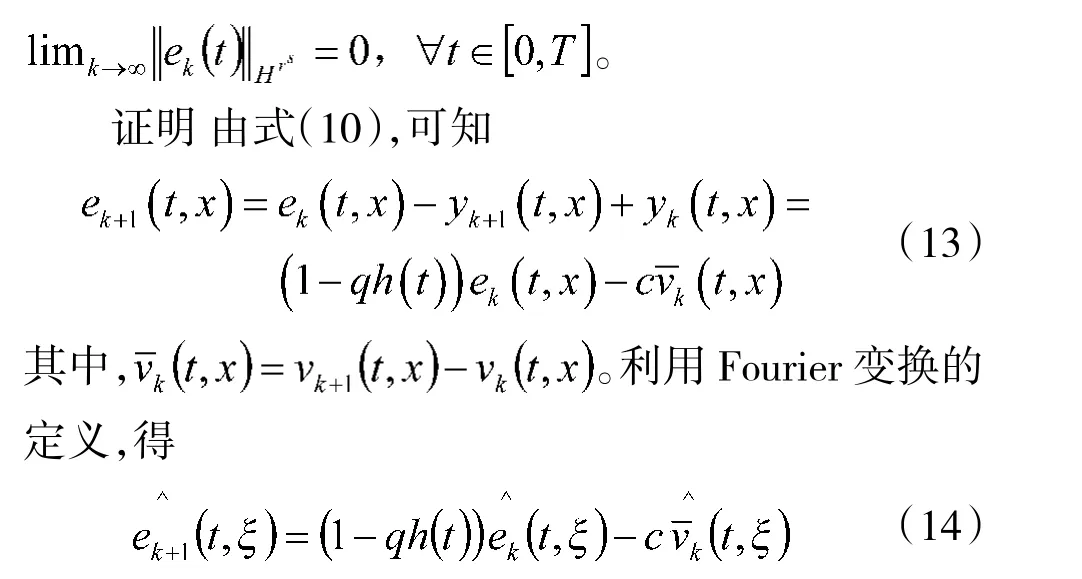
利用半群理論及式(3),得
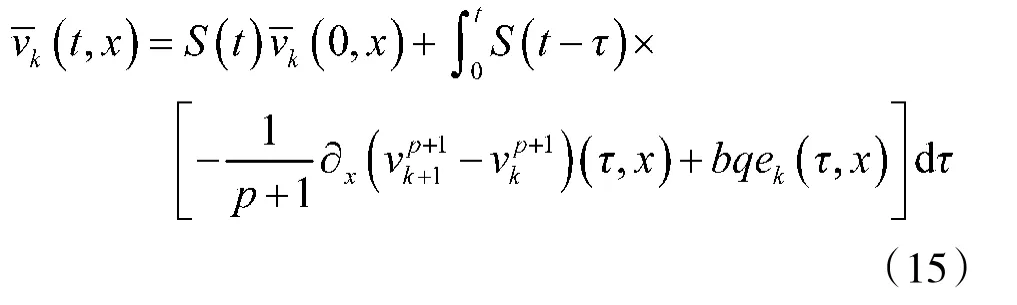
因此

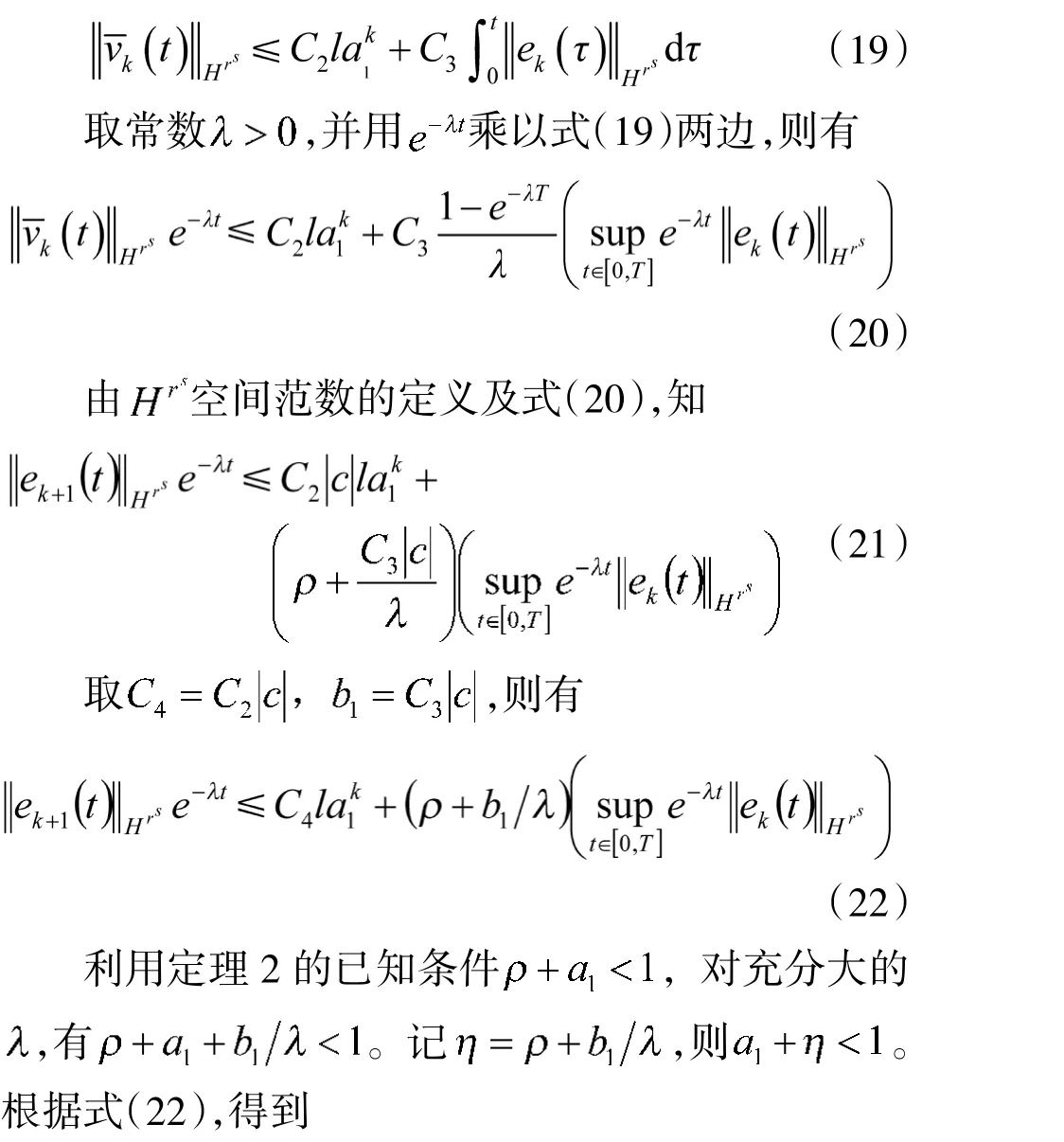
利用引理4,得到
及
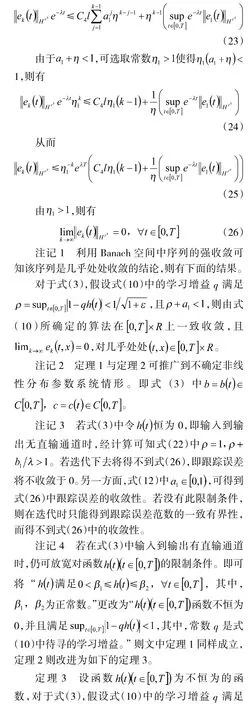
由式(15)和式(16),可知
4 數(shù)值實(shí)例
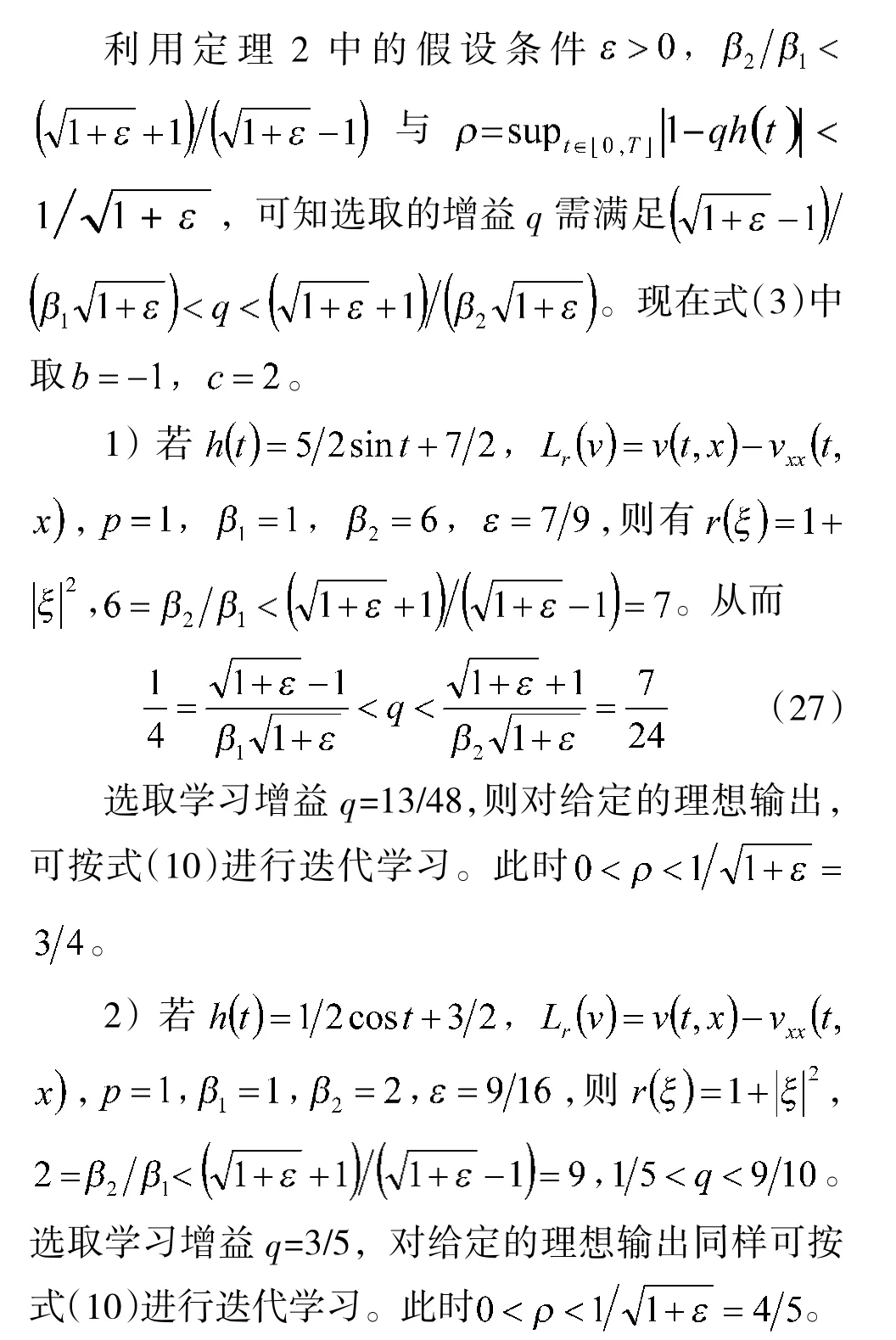
從而說(shuō)明可選取適當(dāng)?shù)膆(t)與ε,進(jìn)而得到相對(duì)應(yīng)的學(xué)習(xí)增益q。
5 結(jié)論
登錄APP查看全文
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
核科學(xué)與工程(2021年4期)2022-01-12 06:30:26
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
今日農(nóng)業(yè)(2020年19期)2020-12-14 14:16:52
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2020年6期)2020-07-25 02:31:36
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年9期)2018-09-26 05:59:44
瘋狂英語(yǔ)·新讀寫(xiě)(2018年2期)2018-09-07 09:32:10
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45