一種基于激光雷達的機器人自主充電方法
2022-04-26 12:35:58劉甲賓
鐵路通信信號工程技術 2022年4期
劉甲賓
(1.北京全路通信信號研究設計院集團有限公司,北京 100070;2.北京市高速鐵路運行控制系統工程技術研究中心,北京 100070)
2015年國務院頒布《中國制造2025》,將機器人和先進軌道交通裝備均列為我國智能制造強國戰略的10大重點領域[1]。2020年8月中國國家鐵路集團有限公司出臺《新時代交通強國鐵路先行規劃綱要》,綱要明確,到2035年,全國鐵路網運營里程達到20萬km左右,其中高鐵7萬km左右[2]。
隨著我國鐵路里程數的不斷增長、列車運行速度的不斷提高[3-4],以及信號技術的不斷進步,無人值守車站和中繼站的數量隨之大量增加。現有信號集中監測設備偏重于設備技術參數的采集和分析,缺少現場實時、準確的監測巡視手段[5],依靠人工監測會造成明顯的成本增高、且巡視維護困難、時效性差。大量利用可靠和安全的智能化移動機器人代替人工巡檢將成為趨勢[6]。
移動機器人由自身攜帶的電池供電,在電池電量不足時,需要連接電源充電。因此,自主充電是移動機器人的必備技術。
激光導航定位是當前移動機器人導航定位的重要方式。但激光導航定位技術的定位精確度無法確保充電成功。當前移動機器人自主充電技術主要由裝置或軌道導入、紅外陣列引導和激光掃描環境特征[8-10]等。這些技術需要額外部件、技術支持,或需要測繪周圍環境參數支持。
本文介紹一種帶特征結構的充電裝置和基于特征數據鎖定該裝置的方法,使用該裝置和鎖定方法可以協助移動機器人完成自主充電。
1 結構與位姿
1.1 結構
1.1.1 機器人結構
機器人上安裝激光雷達、儲能電池系統、運動控制系統、無線通信設備和無線充電器受電端,如圖1所示。

圖1 機器人結構Fig.1 Robot structure
激光雷達為單線雷達,水平安裝。激光雷達周期性掃描周邊一個平面,從起始角到終止角,以角分辨率遞增掃描,每周期返回一幀數據。每幀數據包含平面內每個被掃描點的距離值,該距離值為障礙物到雷達中心的距離。每幀數據中距離值的順序與掃描順序相同,因此可以根據點序號確定這條激光線束的角度。點序號確定的角度是以激光中心軸為原點、以初始掃描位置為0°的極坐標系中的角度。
儲能電池系統包括儲能電池和狀態反饋模塊,狀態反饋模塊的反饋信息包括剩余電量和充放電狀態。
運動控制系統用于調整機器人的位姿,調整包括左右旋轉和前后移動。
無線通信設備用于與充電裝置通信。
無線充電器受電端用于接收充電裝置輸電端的電能輸入,是機器人充電功能的輸入接口,如圖1所示。為達到高效充電目的,無線充電機受電端和輸電端的錯位應不大于2 cm,距離不大于1 cm。
1.1.2 充電裝置結構
充電裝置包括充電樁和充電控制設備。充電樁包括無線充電器輸電端、特征結構和電源轉換模塊;充電控制設備包括控制模塊和無線通信模塊,如圖2所示。

圖2 充電裝置Fig.2 Charging device
無線充電器輸電端用于向機器人的無線充電器受電端輸出電能,是充電樁充電功能的輸出接口。
特征結構采用橫向長條形平面,中部設置兩個凸起作為特征標記。特征結構水平安裝,表面采用光滑處理,顏色宜采用淺色。
電源轉換模塊用于將工頻AC220 V轉換為機器人儲能電池充電所需的DC48 V,且保證輸出功率。
控制模塊用于監控充電功能的開啟和關閉。
無線通信設備用于與機器人通信。
1.1.3 機器人結構與充電樁結構的關系
機器人受電端安裝在機器人正前方,與充電樁輸電端同高。
激光雷達安裝在機器人正前上方,掃描平面與充電裝置特征結構橫向中線同高。
1.2 位姿表示
機器人坐標系采用右手坐標系,如圖3所示。正面是x軸的正方向,左邊是y軸的正方向,上方是z軸的正方向。
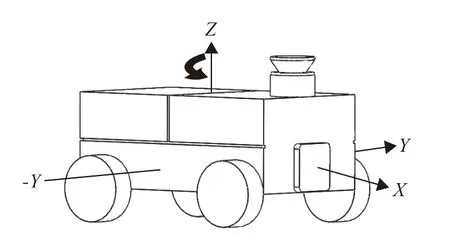
圖3 機器人位姿坐標系Fig.3 Coordinate system of the pose of the robot
在充電裝置輸電端正前方距離D處設置充電原點,設機器人正常充電的位姿為(x0,y0,θ0),則在充電原點調整的目標位姿為(x0-D,y0,θ0)。
2 自主充電方法與偏差計算
2.1 自主充電方法
機器人通過儲能電池狀態反饋模塊檢測電池剩余電量;當檢測到電池剩余電量低于返航充電閾值時,機器人中斷當前任務,記錄中斷點,返回充電原點。
機器人到達充電原點后,切換到充電位姿調整模式。該模式下,機器人首先根據特征結構鎖定充電裝置,計算位姿偏差,然后根據計算結果調整機器人位姿。位姿調整完成后,控制機器人前進距離D,然后發送充電請求,并根據反饋信息判斷是否滿足充電條件:若不滿足充電條件,則控制機器人后退固定距離D,重復充電原點位姿調整;若滿足充電條件,則等待充電完成。
充電完成后機器人發送停止充電請求,后退距離D到充電原點。然后切換到自動任務模式,返回中斷點,繼續執行未完成任務。
2.2 偏差計算
激光雷達與特征結構的幾何關系如圖4所示。B為激光雷達,DE為特征結構,A為特征1、C為特征2。激光雷達掃描到的特征1距離為BA(c),光束序號I1;特征2距離BC(a),光束序號I2;激光雷達角分辨率為f,BF為機器人正前方光束,序號I3。

圖4 幾何關系Fig.4 Geometric diagram of laser beams and the feature structure
2.2.1 鎖定充電裝置
根據特征數據識別特征1和特征2,計算兩個特征之間的距離b。

聯合公式(1)、(2)可得:

計算所得長度b與實際兩特征距離X1對比,在閾值范圍內,即X1-E2<b<X1+E2(其中E2是誤差閾值),則鎖定無線充電裝置位置成功。
2.2.2 位姿偏差計算
根據掃描數據計算機器人當前位姿與充電原點的目標位姿(x0-D,y0,θ0)的偏差Δx、Δy、Δθ。其中,Δx為x方向偏差, Δy為y方向偏差,Δθ為姿態角偏差。
1)計算Δθ
根據雷達B到已知線段兩端AC距離,計算雷達B與線段AC所在直線的垂線BO的線束序號,確定機器人姿態角偏差 。
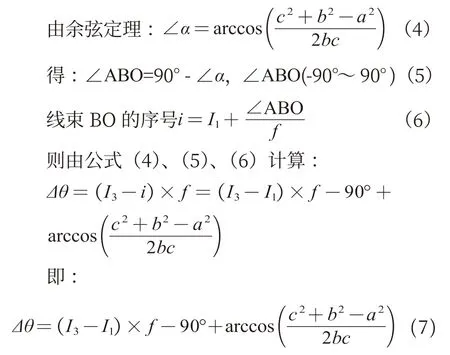
2)計算Δx
根據激光雷達與特征機構平面的垂直距離計算Δx=h-D。


3)計算Δy
激光雷達中心與特征機構平面兩個特征的中垂線的距離,即Δy:

其中,ΔABO=(I1-i)×f,ΔCBO=(I2-i)×f,i為計算所得垂直于線段AC所在直線的線束BO的序號,即∠ABO(-90°~90°),∠CBO (-90°~90°)。
3 效果驗證
3.1 數據處理
為獲取穩定的數據,機器人在靜止狀態收集激光雷達數據,且采用中值平均濾波處理。結果如圖5所示。
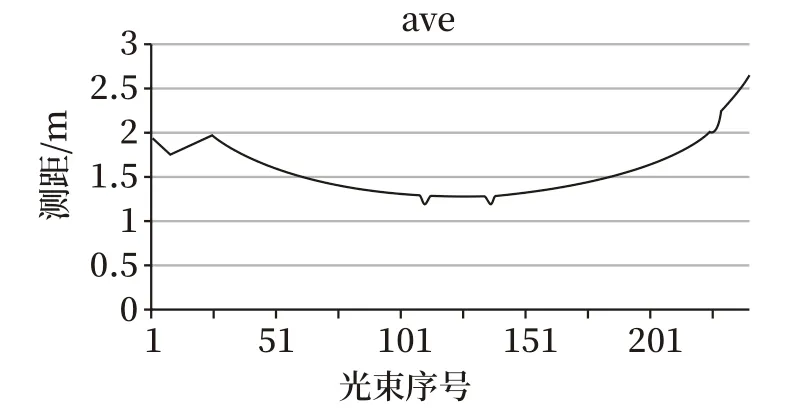
圖5 特征掃描數據Fig.5 Scanned feature data
首先從數據中提取直線段,以每一段直線為一個處理單元。然后經過微分,特征累計放大,最后采用與順序數據中值濾波差值的方法處理數據,有效直線段處理結果如圖6所示。根據數據處理結果,可迅速鎖定特征結構并計算偏差。

圖6 數據處理結果Fig.6 Data processing results
3.2 充電測試
特征結構長度X取值100 cm,兩個特征距離X1取值20 cm,特征寬度3 cm,高10 cm,進行測試。測試結果顯示,取D為150 cm,特征距離偏差閾值E1(-2 cm~2 cm),角度偏差Δθ閾值E2(-0.2°~0.2°),Δx閾值E3(-0.5 cm~0.5 cm),Δy閾值E4(-0.5 cm~0.5 cm)。
經過測試,在Δθ(-25°~25°), Δx(-20 cm~20 cm),Δy(-20 cm~20 cm)范圍內可確保完成充電。
4 結束語
隨著國內鐵路無人值守車站和中繼站數量的大量增加,設置在車站和中繼站的控制列車運行的關鍵設備數量將更龐大。依靠人工巡檢需要眾多高水平的專業技術維護人員,成本較高、維護困難且時效性差。利用先進的機器人技術實現無人值守站信號室在線安全巡檢系統,節省人工的同時利于提高現場安全維護水平、降低事故率,對鐵路行業智慧化、智能化的健康發展具有重要意義[13]。本文介紹的特征裝置和計算方法,已經在信號室內巡檢機器人上試用。試用結果表明,該結構和計算方法可確保機器人準確定位充電裝置,并完成自主充電。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
哲學評論(2021年2期)2021-08-22 01:53:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中華詩詞(2019年7期)2019-11-25 01:43:04
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
制造技術與機床(2017年3期)2017-06-23 08:11:21
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31