基于全局坐標的接觸網定位器坡度與腕臂預配計算
2022-04-25 06:09:38蔡俊宇王彥哲梁婧文
電氣化鐵道 2022年2期
關鍵詞:關鍵點
蔡俊宇,鐘 源,王彥哲,梁婧文
0 引言
BIM技術逐漸應用于接觸網的設計工作中,在實現精確細部設計時,也對相關計算提出了更高要求。國內接觸網定位器坡度計算主要采用將三維體系投影至二維平面,再根據其力學關系計算空間位置的方法[1~3]。該計算方法以單支柱為對象,忽略了相連定位點的影響,特殊區段存在較大的誤差[4]。本文以BIM設計為向導,通過建立全局坐標,
引入空間向量概念,根據定位器的受力情況,計算得出任意區段內所有懸掛點處定位器坡度,再根據具體安裝形式,計算得到腕臂零部件長度及空間位置等信息,最后在BIM平臺生成接觸網懸掛細部設計圖紙,實現平面布置圖與安裝圖的統一。
1 計算流程
本文計算以統一的空間坐標系串聯定位器坡度、腕臂預配和BIM出圖,需要明確接觸懸掛各個零部件的重心、裝配方式、材料等關鍵信息,安裝形式將影響零部件選型及關鍵點坐標位置。詳細的計算流程如圖1所示。
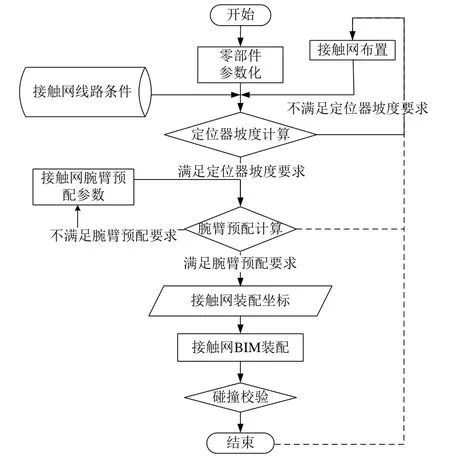
圖1 接觸網定位器與腕臂預配計算流程
(1)確定接觸網零部件關鍵裝配點以及關鍵點間的空間位置關系,將可變的空間關系以參數表示,固定的空間關系以常量表示。
(2)根據目標區間內的線路條件及接觸網平面布置、接觸網安裝形式等計算懸掛點處的定位器坡度。當計算結果不滿足定位器坡度要求時,調整定位器長度或類型并重新計算。
(3)根據線路限界、腕臂安裝形式及零部件選用,以及定位器坡度計算結果,完成腕臂預配計算,確定腕臂預配關鍵點坐標。腕臂計算結果需校驗調整,若不滿足預配要求,需調整腕臂參數,使其滿足預配要求,且需要重新調整定位器長度并計算定位器坡度。
(4)根據計算得到的定位器、腕臂關鍵點坐標,在BIM軟件中建立接觸網腕臂模型,并校驗體積碰撞。
2 坐標變換
2.1 零部件參數化
根據接觸網零部件設計圖紙建立零部件基礎模型,并作為BIM建模的基本零件庫,方便精細化輸出結果。零部件裝配時的約束點或面是輸出接觸網BIM模型的關鍵,也是進行接觸網相關計算的重點。根據零部件間的約束劃分裝配的分界,統一接口信息。劃分時需制定相應規則,既要考慮簡化后續的計算,同時也需避免因接口不統一而造成的零部件體積碰撞。
此外,計算前需要確定關鍵點、面的相對空間關系。可調的長度、角度等變量采用參數形式表示,不可調的量以定量形式表示。復合絕緣子、定位器的參數化等效如圖2所示。

圖2 接觸網零部件參數化示意
單個零部件的關鍵點可以通過建立三維正交坐標系,以(x,y,z)的坐標形式表示。為方便角度的調整,亦可采用極坐標形式。
2.2 全局坐標
在計算接觸網定位點坡度時,傳統方法是以單根支柱為對象,基于受電弓弓頭包絡線構建線路斷面,依據投影關系將三維受力情況降維,進行力學分析與計算,其實質是每個支柱斷面均有獨立的坐標系,如圖3所示。

圖3 定位點獨立的坐標系
全局坐標以目標線路區間內的絕對空間關系建立坐標系,以此形成連續空間的概念,如圖4所示。空間內的點均以相同的坐標系進行表示。不同斷面的坐標經過線路里程、走線和高程可變換為統一的全局坐標。

圖4 全局坐標系
由X1Y1Z1O坐標系轉化至XYZO坐標系的旋轉參考式(1)進行:
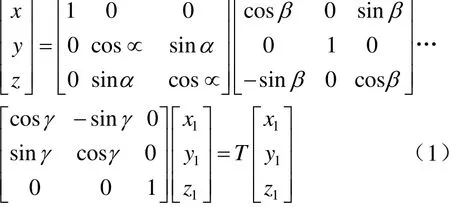
對于原點O變化的情況,可以寫成齊次形式:
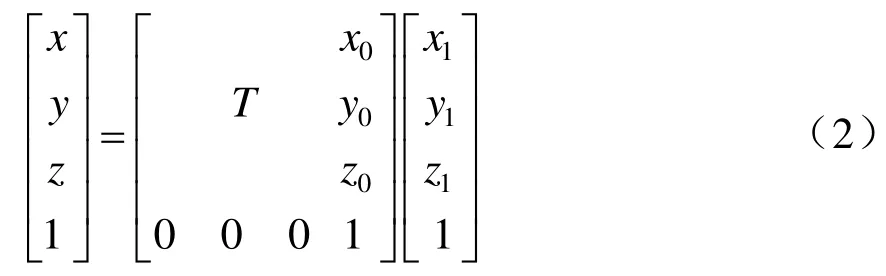
接觸網零部件的關鍵點也參照式(1)和式(2),通過坐標變換引入全局坐標系進行對應的計算。
引入全局坐標后,每處接觸網的每一個支持裝置、每一個零部件的關鍵點均通過全局坐標以統一的形式表示。雖然單個支柱斷面的預配計算表示式變得復雜,但因外軌超高、曲線半徑等特殊線路情況在坐標中予以體現,無需特別考慮,且相鄰支柱拉出值、軌面變化帶來影響均可反映在計算過程中,計算結果更加準確。
2.3 向量形式與計算
零部件的受力情況同樣能以向量形式表示,受力分析與幾何空間計算可結合為一體,大大簡化分析與計算過程。
力可以寫為力的模與表示方向的單位向量之積,而力矩同樣可以寫為向量的形式,即力與力臂的叉乘:

式中:L為轉軸到力的作用線的垂直距離的向量;F為力的向量;M為力矩。
這樣,通過零部件的空間分析可以得到力的向量;而在受力平衡或力矩平衡的條件下,可計算零部件的姿態,實現幾何空間計算與力學計算的融合。以該方式計算定位器坡度,進而實現下一步腕臂的預配計算。另外,在腕臂預配后,還可校驗平腕臂、斜腕臂、支撐等的受力情況。
3 定位器坡度的向量計算
3.1 受力分析
定位器坡度θ定義為定位管與受電弓弓頭平面或軌面的夾角。不考慮環境因素導致的附加荷載影響,定位器受兩端接觸線張力、定位器及定位線夾自身重力、接觸線重力及定位鉤環處的反作用力,如圖5所示。

圖5 定位器受力示意
定位器工作時圍繞著定位鉤環轉動,在靜止時滿足力矩的平衡,即
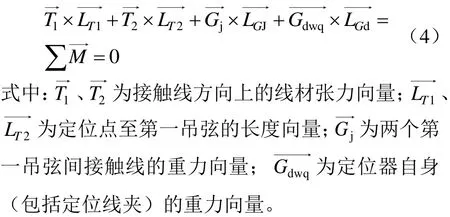
由于外軌超高與線路高程等信息包含在坐標中,故不需要再區分直線或曲線區段。
3.2 計算示例
根據線路平面圖及高程表,線路上任意一點的坐標均為已知。考慮前后跨對定位器坡度的影響,需在至少3組定位間建立基礎模型算例。
假設A、B、C為沿線路方向的3處定位點,且對應支柱在曲線外側;A、C為反定位,B為正定位;線路外軌超高100 mm;跨距50 m;第一根吊弦距定位點7 m;接觸線張力取28.5 kN。B柱處的計算結果見表1。

表1 定位器坡度計算結果
通過空間向量計算得到的定位器坡度充分考慮了不同線路條件下對其產生的影響,為下一步腕臂預配計算及BIM模型輸出提供了基礎。
4 腕臂預配計算
4.1 方法
按照傳統施工預配工藝,接觸網腕臂預配一般根據實測的線路條件,通過手工計算或計算軟件得出平腕臂、斜腕臂等主要型材的長度,在現場安裝時進行二次調整。在計算時,取定位器坡度為標準值,一般設定為定值。而實際定位器坡度取決于受力情況,常與標準值存在偏差。這一因素會影響預配計算的精度,安裝現場調整及返工時常發生。
因此,腕臂預配計算應首先確定該支柱的定位器坡度,并考慮定位器的安裝形式,完成腕臂的預配計算。區別于傳統的三角腕臂從平、斜腕臂開始計算的方法,這種由下而上的、考慮了接觸網懸掛影響的計算方式更貼近于現場實際情況。
4.2 計算順序
為簡化計算過程,單支腕臂的預配計算在支柱的平面內可通過二維坐標進行計算,最后再乘斷面的切向量,從而變換為全局坐標系下的三維坐標。雙支腕臂計算不可進行該簡化。
根據斷面處軌面中心點的坐標、導線高度、拉出值及外軌超高等參數,可得到接觸線在受電弓平面的坐標;然后根據上一步計算得到的定位器坡度,得到定位支座的坐標。
根據接觸線最大抬升量,判斷出定位器最大抬升量時是否與定位管接觸,同時還應保證定位器最大抬升時與定位管的安全距離。然后,確定定位器與定位管相距最近的點,并以定位管上該點反推定位管的抬高角度,再推出定位管與斜腕臂交點。最后,計算腕臂、斜支撐、拉線或拉桿等部件的長度與角度,由此確定腕臂各關鍵點的坐標。詳細計算順序如圖6所示。

圖6 腕臂預配計算順序
至此,腕臂預配計算完成,獲得了腕臂系統各關鍵點的坐標,這些坐標將用于BIM設計裝配。
4.3 空間關系校驗
在計算過程中,需要進行數次的校驗。腕臂預配的結果應滿足:定位器在預留抬升量內不與定位管發生干涉;定位管、平腕臂長度滿足其上連接件安裝的需求;定位連接器與腕臂支撐連接器之間的距離不小于定值;雙支腕臂預配時,相鄰支線索與腕臂之間距離不小于定值等條件。
腕臂預配的計算結果并不是唯一的,只有通過數次的迭代優化才能取得理想的結果,保證腕臂預配的安全性、可靠性和美觀性。
在檢驗無誤、參數優化后,得到各關鍵點的空間坐標方可作為腕臂預配的參數并輸出報表,為后續輸出BIM設計圖紙奠定基礎。
5 BIM設計應用
BIM作為一種兼具可視化、全局性的細部設計手段,在工程設計、施工以及運營維護中均可起到不可比擬的作用[5,6]。
根據計算結果,依據每個零部件的關鍵坐標點的空間位置,調用零部件模型庫并裝配,呈現具體的腕臂安裝。圖7展示了采用空間向量法計算輸出的某單支正定位腕臂的BIM輸出模型。建立合理的坐標系是簡化計算過程和優化處理速度的關鍵。可以通過將原始線路數據分段分區間進行計算和建模,能更好更快地得到預期結果。圖8是某區間內3組腕臂連續的BIM輸出結果。空間上各組裝配與線材的關系明確且易于識別;每組裝配的預配長度均可通過計算表自動生成,也體現在BIM的設計圖紙上,有利于施工組織及運營維護。亦可利用BIM模型進行體積碰撞校驗。

圖7 正定位腕臂BIM輸出模型
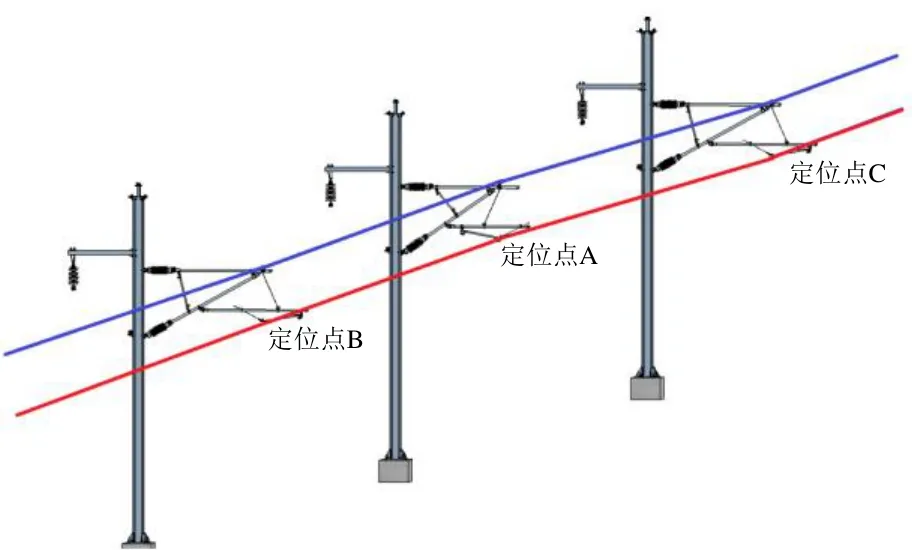
圖8 某區間內3組腕臂BIM輸出結果
在特定線路上,此種參數化的定位器、腕臂預配及BIM輸出,使用到的零部件以及定位器、腕臂形式是有限的。特殊地段,如小曲線半徑或小側面限界,會增加BIM模型庫中模型數量及引用鏈接條目。速度等級、線路類型、腕臂安裝形式、定位器形狀、零部件設計等均要求更豐富的模型庫。
6 結語
本文利用全局坐標,以向量形式優化了定位器坡度的計算方法,打破了定位器坡度和腕臂預配間的信息壁壘,將定位器坡度計算結果直接引入腕臂的預配計算,提高了設計準確度和精細度。結合BIM設計圖紙,還可直觀反映現場安裝后的情況。本文針對預配計算尚未提出明確的計算精度要求,且多次的迭代計算導致計算速度變慢、效率降低,本方法在實際工程推廣中有一定難度。未來,還應考慮根據導線安裝曲線,結合錨段長度等信息,引入弓網動力學仿真,將定位器實際抬升、腕臂偏轉的因素納入計算,進一步提高BIM設計的準確性和實用性。
猜你喜歡
建材發展導向(2022年3期)2022-04-19 12:51:16
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
建材發展導向(2021年11期)2021-07-28 06:58:02
石油化工建設(2018年1期)2018-07-10 09:49:50
廣東教育·高中(2017年10期)2017-11-07 10:17:51
河南畜牧獸醫(2016年24期)2016-11-29 01:28:30
新高考·高一物理(2015年5期)2015-08-18 18:46:06
創業家(2015年3期)2015-02-27 07:52:43
中國衛生(2014年2期)2014-11-12 13:00:16
