基于視覺導航的無人機自主著艦技術研究
2022-04-20 06:46:38肖思宇
科學技術創新 2022年10期
肖思宇
(中國直升機設計研究所,江西 景德鎮 333000)
艦載型無人機可執行綜合偵察、輔助探潛、通信中繼、電磁對抗、應急保障等任務,具有低成本、長續航、用途廣的優勢,在海軍作戰體系中扮演越來越重要的角色[1,2]。受海上環境和艦船自身運動的影響,艦載型無人機著艦階段事故率最高,因此自主著艦技術的發展非常關鍵。目前國內外常用的無人機導航方式有:慣性導航系統(INS)、全球定位系統(GPS)、INS/GPS 組合導航系統、視覺導航系統[3,4]。慣性導航系統的誤差隨時間積累,GPS抗干擾能力差,均不能滿足復雜作戰環境中艦載型無人機自主著艦的需求,而視覺導航系統能夠自主輸出無人機速度和航向的控制量,能耗低、抗干擾能力強、精確度高,與其他導航系統相比更適合艦載型無人機完成自主著艦任務。
基于位置的伺服控制技術和基于圖像的伺服控制技術是常用的無人機視覺導航技術[5-7]。基于位置伺服的方法是根據相機解算出無人機與合作標志的相對位置,再根據相對位置控制無人機的航向和速度,實現自主著艦。而基于圖像伺服的方法則是根據視覺輔助裝置采集合作標志的圖像特征直接得到無人機的航向和速度控制量,提高了控制的時效性和準確度,因此本文選用基于圖像伺服的控制方法。
1 無人機著艦過程
艦載型無人機進近段著艦過程如圖1 所示,無人機距離艦船1km 左右時,INS/GPS 組合導航系統及艦船著艦引導系統給出無人機控制指令,使得無人機向艦船位置飛行。無人機降低自身高度的同時縮短與艦船的相對距離,當無人機抵達艦船上方50m 左右的著艦點時,進入自主著艦模式,視覺輔助裝置的相機模塊提取合作標志圖像信息后給出導航控制指令,控制無人機降落到艦船指定位置。
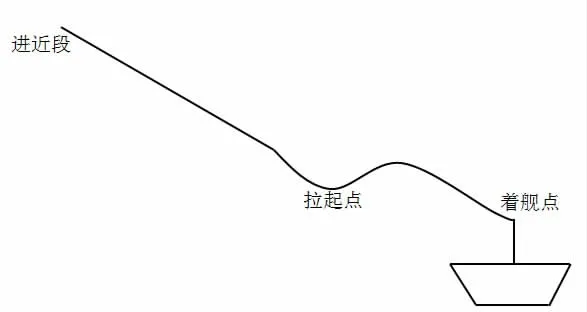
圖1 艦載型無人機進近段著艦過程
1.1 合作標志
合作標志是自主著艦技術的重要組成部分,直接影響視覺輔助裝置控制無人機的精確性[8-9]。在無人機降落過程中,視覺輔助裝置視場不斷減小,應該確保在降落過程中相機視場始終能覆蓋輔助標識,且在光強較弱的環境下相機能夠識別合作標識,因此選用嵌套式的合作標志,并且合作標志能夠被紅外相機識別,合作標志如圖2 所示。在無人機自主著艦過程中,相機模塊優先提取大合作標志的圖像信息,在無人機高度下降過程中,當相機視場不能覆蓋大合作標志時,相機模塊提取小合作標志的圖像信息,嵌套式的合作標志很好的滿足了自主著艦過程中相機提取圖像信息的需求。

圖2 合作標志
1.2 基于圖像伺服的導航原理
基于圖像伺服的導航原理如圖3 所示,視覺輔助裝置采集合作標志的圖像并提取像素特征,視覺處理終端解算提取的圖像特征與期望圖像特征的偏差得到無人機的運動調整策略,輸出四維速度控制量(X,Y,Z 方向的線速度和偏航角速度),對無人機的飛行速度和航向進行伺服控制。通過控制無人機各個方向的運動,使得無人機降落到指定位置。
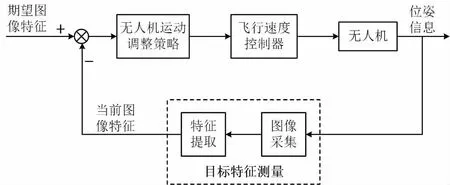
圖3 基于圖像的視覺伺服控制
2 視覺輔助裝置
視覺輔助裝置樣機包括視覺處理終端、可見光相機、紅外相機等模塊。關于相機模塊,可見光相機采集的圖像視頻分辨率不低于1920×1080 像素,紅外相機采集的圖像視頻分辨率不低于1280×720 像素。視覺處理終端應滿足重量較輕且功耗較低的要求,能夠實時接收并處理相機模塊的圖像信息,監控無人機著艦的狀態并向無人機飛控系統和測控系統傳遞控制指令。視覺輔助裝置樣機如圖4 所示。

圖4 視覺輔助裝置樣機
無人機自主降落的具體過程如圖5 所示。首先根據現場環境的不同,分別選擇兩種不同相機采集合作標志的圖像信息:當光照條件較好時,選擇可見光相機;當光強較弱時,則選擇紅外相機。視覺輔助裝置控制相機采集圖像特征,再利用提取圖像特征與期望圖像特征的偏差控制無人機X、Y 方向的速度和偏航角,當無人機X、Y方向位置和偏航角的誤差小于設定閾值時,認為無人機與合作標志對齊,輸出Z 方向的速度控制量,開始降低高度的過程,同時繼續維持X、Y 方向的控制。
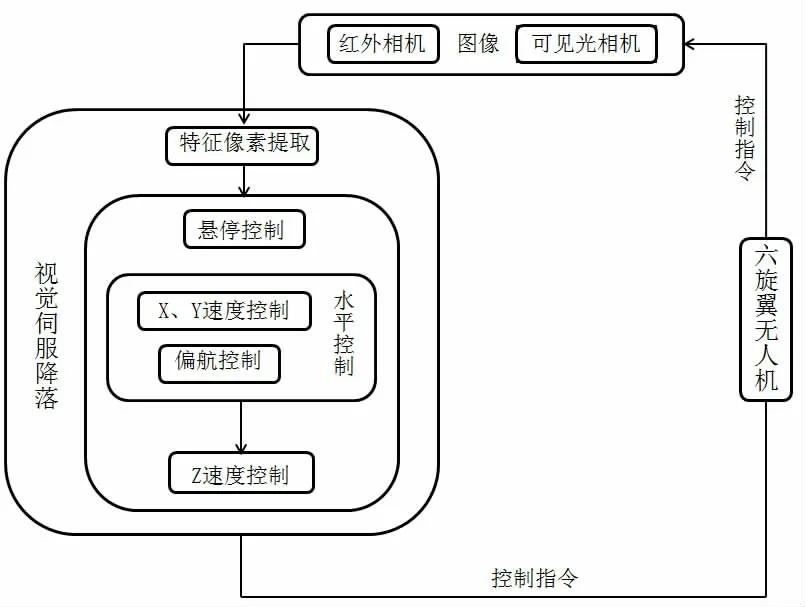
圖5 無人機自主降落的控制過程
3 自主降落試驗
在Gazebe 軟件中構建海洋環境,海洋環境模型包含浪、風、霧、照明環境的模擬,控制仿真無人機模型在不同環境中降落在艦船模型上,完成基于圖像伺服的自主著艦技術仿真驗證后,研制了視覺輔助裝置樣機,并掛載在六旋翼無人機上進行試驗驗證,包含地面自主降落試驗和艦面模擬臺自主降落試驗,掛載視覺輔助裝置樣機的六旋翼無人機如圖6 所示。

圖6 六旋翼無人機掛載視覺輔助裝置樣機
3.1 地面自主降落試驗
在地面放置合作標志,六旋翼無人機掛載視覺輔助裝置樣機懸停在合作標志上方50m 左右的位置,與合作標志正中心偏離不超過2m,模擬艦載型無人機著陸過程。當降落高度在50m 左右時,無人機均能成功自主降落在合作標志上。降落點偏差即無人機降落點中心位置與合作標志中心位置的偏差,偏差值如表1 所示,多次試驗結果表明,視覺輔助樣機能夠控制無人機自主降落在合作標志上,降落點偏差不超過0.15m,滿足安全著陸的要求。

表1 不同高度自主降落的降落點偏差
3.2 艦面模擬臺自主降落試驗
海面上風浪導致艦船出現縱搖、橫搖、縱蕩、橫搖、沉浮和艏搖現象,艦船運動響應隨著海況等級的提升而加大,嚴重影響無人機的著艦安全[10,11]。其中橫搖和縱搖運動對著艦安全威脅最大,參照法國“克里蒙梭”號航母為保證艦載機在5~6 級海況下進行作業的適航標準:橫搖最大角度為3°,縱搖最大角度為1.4°,垂直位移最大為2.2m[12,13]。采用艦面模擬臺模擬艦船甲板的運動,設置最大橫搖角為5°,最大縱搖角度為2.5°。選用六自由度搖擺試驗臺作為艦面模擬臺,如圖7 所示。六旋翼無人機掛載視覺輔助樣機懸停在著艦模擬臺上方50m 左右的位置,與合作標志正中心偏離不超過2m,模擬艦載型無人機著陸過程。

圖7 艦面模擬臺
當無人機降落高度為50m 左右時,無人機均成功自主降落在艦面模擬臺合作標志上,降落點偏差如表2 所示。試驗結果表明:當艦面模擬臺橫搖角不超過5°,縱搖角度不超過2.5°,視覺輔助裝置樣機能夠控制無人機準確地降落在合作標志上,降落點偏差不超過0.2m,能夠滿足安全著艦的要求。

表2 不同高度自主降落的降落點偏差
4 結論
針對無人機自主著艦問題,本文采用了基于圖像伺服控制的無人機自主著艦方法,選用嵌套式的合作標志,研制了視覺輔助裝置樣機。六旋翼無人機掛載視覺輔助裝置樣機進行自主著陸試驗和艦面模擬臺降落試驗,試驗結果表明當艦面模擬臺最大橫搖角為5°及最大縱搖角度為2.5°時,視覺輔助裝置樣機能夠控制無人機完成自主降落。