基于多特征融合的圖像匹配研究
2022-04-20 13:09:18魯家皓張捷胡國勝唐智
微型電腦應(yīng)用 2022年3期
魯家皓, 張捷, 胡國勝, 唐智
(1.上海電子信息職業(yè)技術(shù)學(xué)院,教師工作部/人事處,上海 201411;2.上海大學(xué),機(jī)電工程與自動化學(xué)院,上海 200436;3.上海電子信息職業(yè)技術(shù)學(xué)院,通信與信息工程學(xué)院,上海 201411;4.東華大學(xué),機(jī)械工程學(xué)院,上海 201620)
0 引言
隨著多媒體技術(shù)的不斷發(fā)展,每天都會產(chǎn)生大量的圖像,圖像處理技術(shù)在許多領(lǐng)域得到廣泛的應(yīng)用,如醫(yī)學(xué)影像、飛行軌跡、軍事等[1-3]。在圖像采集過程中,由于多種因素的影響,單一幅圖像無法完整描述目標(biāo)的信息,為了更好地描述目標(biāo)信息,可以采用多幅圖像進(jìn)行匹配,得到一幅更加完整的圖像,因此這種圖像匹配成為當(dāng)前研究的重點(diǎn)[4-5]。
針對圖像匹配問題,一些發(fā)達(dá)國家學(xué)者進(jìn)行了長期的研究,提出了許多有效的圖像匹配方法,圖像匹配技術(shù)十分成熟,而國內(nèi)圖像匹配的研究時(shí)間比較晚,亦取得了相當(dāng)多的成果,但是還有許多問題有待解決[6]。當(dāng)前圖像匹配方法可以劃分為2類:一類是基于灰度信息的圖像匹配方法,該類方法首先將圖像轉(zhuǎn)換為灰度圖像,并根據(jù)灰度信息計(jì)算兩幅圖像之間的相似度,從而得到圖像匹配結(jié)果,該類方法的圖像匹配時(shí)間短,圖像匹配效率高,但是圖像匹配的錯(cuò)誤點(diǎn)比較多,難以獲得高精度的圖像匹配結(jié)果[7-9];另一類方法是基于特征的圖像匹配方法,首先提取圖像的角點(diǎn)、邊緣等特征,然后根據(jù)特征進(jìn)行圖像匹配,該類方法對圖像的旋轉(zhuǎn)、尺度縮放等魯棒性強(qiáng)[10-12],但是由于通常情況下圖像的特征比較多,當(dāng)前主要采用單一特征進(jìn)行圖像匹配,無法獲得理想的圖像匹配結(jié)果,圖像匹配正確率低[13-14]。
傳統(tǒng)圖像匹配方法存在誤差大、效率低等問題,為了獲得理想的圖像匹配結(jié)果,本文設(shè)計(jì)了基于多特征融合的圖像匹配方法,在相同實(shí)驗(yàn)環(huán)境下,與其他方法進(jìn)行了圖像匹配的仿真實(shí)驗(yàn)。結(jié)果表明,本文方法提高了圖像匹配精度,縮短了圖像匹配的時(shí)間,具有十分明顯的優(yōu)越性。
1 多特征融合的圖像匹配方法
1.1 圖像的預(yù)處理

(1)
(2)
式中,a和b為收縮與平移因子。
小波分析系數(shù)的計(jì)算式為
(3)
小波分析重構(gòu)形式為
(4)
圖像屬于離散信號,這樣連續(xù)小波無法進(jìn)行直接處理,為此需要對連續(xù)小波進(jìn)行離散化操作:
(5)

這樣可以得到離散化小波分析系數(shù)的計(jì)算式為

(6)
相應(yīng)的離散化小波變換重構(gòu)可以表示為
(7)
1.2 提取圖像特征
1.2.1 LBP特征
在圖像匹配過程中,需要提取特征,根據(jù)特征實(shí)現(xiàn)圖像之間的匹配,因此特征提取十分關(guān)鍵,直接影響到圖像匹配的結(jié)果。
當(dāng)前圖像匹配特征很多,局部二值模式(LBP)特征可以描述圖像灰度變化特點(diǎn),為此采用LBP特征進(jìn)行圖像匹配。圖像一個(gè)像素灰度值為pf,它與鄰域內(nèi)N個(gè)像素點(diǎn)的灰度值有關(guān)聯(lián),那么該像素的LBP特征可以表示為
L=e(pf,p1,p2,…,pN)
(8)
不同像素的灰度值差別比較大,這樣灰度差能夠更加準(zhǔn)確反映出圖像灰度變化特點(diǎn),這樣LBP特征為
L=e(pf,p1-pf,p2-pf,…,pQ-pf)
(9)
通常情況下,中心像素與其他像素之間存在一定的獨(dú)立性,這樣有
L=e(pf)e(p1-pf,p2-pf,…,pQ-pf)
(10)
忽略中心像素點(diǎn)灰度值,中心像素點(diǎn)的LBP特征為
L≈e(p1-pf,p2-pf,…,pQ-pf)
(11)
灰度差值有正負(fù)之分,對其進(jìn)行變換得到
L=e(u(p1-pf),u(p2-pf),…,u(pQ-pf))
(12)
其中:
(13)
最后圖像的像素點(diǎn)LBP特征可以表示為
(14)
1.2.2 邊緣特征
對于一幅圖像f(x,y),邊緣特征也是一個(gè)十分重要的特征,采用Zernike算法提取圖像的邊緣特征,圖像的n階m次Zernike可以表示為
(15)

進(jìn)行圖像邊緣檢測時(shí),通常采用Z00、Z11和Z203個(gè)階次的Zernike不變矩,對圖像f(x,y)進(jìn)行旋轉(zhuǎn)后得到圖像f′(x,y),那么滿足條件式(16),
(16)

(17)
式(17)中,圖像旋轉(zhuǎn)角度計(jì)算式為
(18)
Zernike不變矩對圖像旋轉(zhuǎn)魯棒性強(qiáng),如圖像幅值不變,則有
(19)
Z00、Z11和Z20的積分核函數(shù)分別為
U00=1
(20)
U11=x+jy
(21)
U20=2x2+2y2-1
(22)
旋轉(zhuǎn)圖像的各階Zernike矩計(jì)算式如式(23)~(25):
(23)
(24)
(25)
由上述公式可以得到圖像匹配的Zernike不變矩特征,即圖像匹配的邊緣特征。
1.3 圖像匹配算法
由于單一LBP特征和Zernike不變矩特征無法獲得理想的圖像匹配結(jié)果,因此本文利用兩者的優(yōu)勢,首先采用LBP特征進(jìn)行圖像粗匹配,然后采用Zernike不變矩特征進(jìn)行圖像精匹配,以獲得理想的圖像匹配結(jié)果。
1.3.1 LBP特征的圖像粗匹配
對待匹配的圖像進(jìn)行LBP特征提取后,就可以對它們兩者的LBP特征進(jìn)行匹配,實(shí)現(xiàn)圖像的粗匹配,本文選擇用最近距離與次近距離比法進(jìn)行粗匹配。設(shè)P1、P2為圖像1、圖像2的LBP特征,那么兩者之間的距離計(jì)算式為
(26)
其中,Descri為LBP特征向量。
根據(jù)式(26)計(jì)算待匹配的圖像的全部特征點(diǎn)的距離,設(shè)最近距離與次近距離比為Rod,如果Rod≤0.6,那么表示2個(gè)特征點(diǎn)匹配成功,不然就匹配失敗。
1.3.2 邊緣特征的圖像精匹配
(1)采用Zernike算法提取待匹配的圖像Zernike不變矩特征。
(2)根據(jù)Zernike不變矩對圖像進(jìn)行匹配,實(shí)現(xiàn)精匹配。
2 圖像匹配方法性能的仿真測試
2.1 實(shí)驗(yàn)對象及實(shí)驗(yàn)環(huán)境
選擇文獻(xiàn)[13]、文獻(xiàn)[14]和文獻(xiàn)[15]方法,進(jìn)行對比實(shí)驗(yàn),共進(jìn)行5次圖像匹配實(shí)驗(yàn),每一次匹配實(shí)驗(yàn)選擇的匹配圖像如表1所示。進(jìn)行仿真實(shí)驗(yàn)計(jì)算機(jī)參數(shù)為Intel 4核3.0 GHz CPU,內(nèi)存為32 GB,編程工具為MATLAB 2017a。
表1 每次仿真實(shí)驗(yàn)的圖像匹配數(shù)量
2.2 實(shí)驗(yàn)結(jié)果與分析
統(tǒng)計(jì)不同方法的圖像匹配時(shí)間,結(jié)果如表2所示。由表2可以看出,與其他3種方法相比,本文方法的圖像匹配時(shí)間最少,加快了圖像匹配速度,具有更加廣泛的應(yīng)用范圍。

表2 圖像匹配平均時(shí)間對比 單位:s
統(tǒng)計(jì)不同方法的圖像匹配精度,結(jié)果如圖1所示。由圖1可以看出,與其他3種方法相比,本文方法的圖像匹配精度最高,有效降低了圖像匹配錯(cuò)誤率,具有明顯的優(yōu)越性。

圖1 不同方法匹配精度對比圖
為了測試圖像匹配方法的整體性能,統(tǒng)計(jì)不同方法的圖像匹配錯(cuò)誤率,結(jié)果如圖2所示。對圖2的圖像匹配錯(cuò)誤率進(jìn)行分析可以看出,不同的實(shí)驗(yàn),本文方法的圖像匹配錯(cuò)誤率始終小于對比方法,獲得了十分理想的圖像匹配結(jié)果。
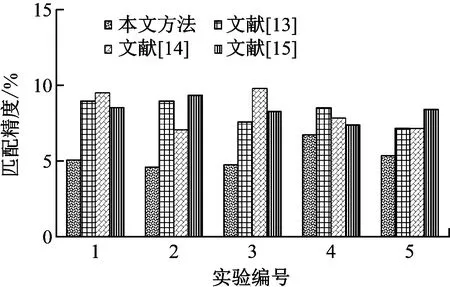
圖2 不同方法的圖像匹配錯(cuò)誤率
3 總結(jié)
傳統(tǒng)圖像匹配方法存在誤差大、效率低等問題,為了獲得理想的圖像匹配結(jié)果,提出基于多特征融合的圖像匹配方法。首先采集待匹配圖像,并對它們進(jìn)行預(yù)處理,去除一些無用的噪聲,然后從圖像中提取灰度特征和邊緣特征,最后根據(jù)這些特征進(jìn)行圖像粗匹配和精匹配,并與其他方法的圖像匹配仿真實(shí)驗(yàn),結(jié)果表明本文方法是一種精度高、耗時(shí)少的圖像匹配方法,具有更高的實(shí)際應(yīng)用價(jià)值。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
