基于循環神經網絡的慣導重標期預測
2022-04-15 11:05:09郝田義許克勤
航空維修與工程 2022年2期
郝田義 許克勤
摘要:現階段,由于慣導標定技術研究主要集中在誤差參數估計方法、慣導標定精度分析方面,較少涉獵慣導的標定周期,導致業內簡單地將慣導的標定可靠性作為重新標定的周期。本文以循環神經網絡技術為基礎,對慣導關鍵數據進行分析,預測激光捷聯慣導重標需求的方法。通過對多臺慣導歷史數據的回歸驗證發現,通過使用基于循環神經網絡技術等人工智能手段,構建基于慣導導航數據的分析模型,對慣導精度變化趨勢進行預測,能夠實現對慣導重新標定時間的預測,及時策劃相應維修保障工作,避免慣導突報視情標定而影響作戰任務執行。
關鍵詞:循環神經網絡;導航數據分析模型;捷聯慣導;標定
Keywords: recurrent neural network;navigation data analysis model;strapdown inertial navigation;calibration
0 引言
慣導系統作為一種不依賴于外部信息、不向外輻射能量的自主導航系統,被廣泛應用于航空、航天、航海以及地面導航等多種工作環境。按其結構劃分,慣導系統主要分為平臺式慣導系統和捷聯式慣導系統兩大類。隨著激光陀螺、光纖陀螺、加速度計等電子技術的發展,測量精度不斷提高,捷聯式慣導系統依托其結構簡單、體積小、維護方便等優勢,迅速在各型航空器中取代平臺式慣導系統,得到廣泛應用。但捷聯式慣導系統沒有實體物理平臺,是將陀螺和加速度計直接固定安裝在運動載體上,因而無法實現現場精確標定。捷聯慣導重標周期作為其性能保障的一項重要指標,也已成為其長期精度穩定性的標志和設備使用過程中標定保障的直接依據。因此,如何有效、精確地確定重標期成為捷聯慣導系統的關鍵技術之一,引起了國內外研究與應用機構的廣泛關注。
1 慣導重標期國內外研究現狀
目前,由于技術封鎖與商業保密性等原因,國外在慣導重標期方面的相關理論研究并未披露。從各國捷聯式慣導的性能指標變化來看,國外的捷聯式慣導重新標定周期基本分為兩個階段。第一階段為定期重新標定階段,該階段按照美軍標中提出的關于慣性元器件的周、月、年穩定性和重復性的分級指標體系,將慣導重標期確定為2年;第二階段主要致力于全壽命周期內免重新標定技術的實現,一般壽命為5~10年。
國內在此領域的研究還處于起步階段,目前普遍規定標定周期為12個月或18個月。12個月或18個月的最小標定周期其實是用平均無故障間隔時間(MTBF)指標簡單替代重標周期,或者基于長期使用獲得粗略的經驗周期來獲取最小標定周期,并沒有一套完整的理論與方法指導捷聯慣導重標周期的確定。這種方法在實際使用中導致重標周期與使用性能不匹配,甚至標定保障周期無據可依。
隨著健康監控技術的應用,航空裝備定期維修的工作理念逐步轉變為基于狀態的視情維護。目前,在用的激光捷聯慣性系統已采用了視情標定技術,但對于慣導本身精度的評定仍基于1989年發布的GJB 729-89《慣性導航系統精度評定方法》。該方法僅在慣導內部記錄最近8次任務的有效徑向誤差率,計算其累計圓概率誤差,并與技術指標相比較,如果超過該指標,則立即提示慣導需重新標定。現行的維修手冊及規程已明確:當單慣導系統提示重新標定時,可執行一次任務;當雙慣導系統同時提示重新標定時,必須對其中至少一部慣導進行標定或更換至少一部慣導后方可執行任務。實際使用過程中常常存在上一架次提示標定,但在持續使用一架次后反而不再提示的情況,或者導航誤差明顯偏大時又不提示標定的情況。
2 基于循環神經網絡的慣導重標期預測方法
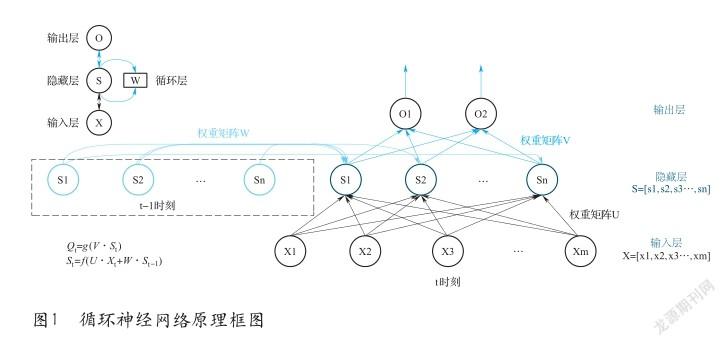
傳統的基于時間序列的非線性重構對于多參數變量的隨機特性的預測效率較低。人工神經網絡技術的發展,催生了越來越多對于所選信號參數和預測結果中存在未知關系時診斷的應用。從數學角度出發,循環神經網絡將一組輸入變量映射為輸出變量。循環神經網絡由輸入層、隱藏層和輸出層組成,其原理如圖1所示。輸入層的主要任務是預處理(可能包括信號的歸一化或縮放)。主要的處理過程發生在隱藏層和輸出層。通過設計層與層之間的邏輯關系,循環神經網絡使上一層的每個元素都能有效地連接到下一層的每個部分。
實際使用中,慣導工作的性能參數逐步退化衰老。在這一衰老過程中,可以通過飛參獲取其不斷輸出的數據以及使用時間信息。將這些數據與衛星導航數據進行實時對比,便可得出慣導精度的變化歷程。這些變化數據經過基于循環神經網絡的人工智能算法的處理,并從慣導飛參數據中提取特征、尋找規律,而后對算法進行優化調整,最終訓練即形成捷聯慣導精度變化的趨勢預測模型。在接受慣導飛參數據輸入后,根據該模型實時輸出預測結果,并且使用結果與期望值之間的Loss值(真實值與預測值之間的差距衡量參數)來衡量模型的準確程度,最終達到一定的預測準確率,從而實現對慣導標定時機的科學預測。
2.1 循環神經網絡建模分析方法
傳統的基于可靠性研究分析的慣導重標期確定方法一般采用理論分析和失效實驗相結合的方法,其分析與研究的對象一般是失效數據。對于慣導這一高可靠性長壽命產品,能夠采集到的失效數據樣本相對較少,甚至在試飛鑒定的特定周期內也無法獲取失效數據,故需要引入一種新的評估方法來彌補傳統可靠性評估方法的不足。
由于構成慣導的系統較為復雜,難以利用失效的物理、化學反應規律來構建慣導失效模型。因此,本文采用數據直接擬合的方式建立模型。慣導重標期的特征模型主要由特征參量閾值、實際參數分布和性能退化軌跡函數3個重要部分構成。本文提出的建模思路為:測量導航精度退化數據分布,估計導航精度退化數據分布參數并擬合軌跡,給出分布參數隨時間變化規律的模型。
重標期預測是利用概率統計方法對慣導的導航精度特征量進行統計推斷的過程,該方法本質上是以概率形式反應一定時間內導航精度達到閾值的可能性。
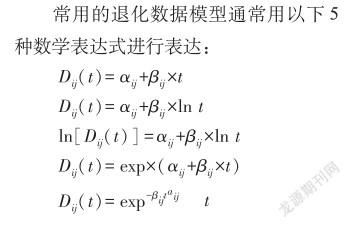
其中,t為時間; 為性能退化量;、為退化軌跡系數。
由于同型產品的一般退化趨勢具有區域一致性,因此本文假設同種產品的退化軌跡可以利用同種數學函數進行表達。由于不同產品件的個體差異,個體的退化軌跡函數之間存在不同的方程參數,導致其個體的重標期存在不確定性。因此,本文假設產品的性能退化服從相同的分布規律,分布參數隨時間變化,即在不同測量時間,產品性能下降遵循相同的分布模型,分布參數是以時間為變量的函數。
2.2 數據集的獲取及處理
本文選取圖2所示的時間類、純慣類、衛星類、星組類、陀螺類等37個連續性數據作為循環神經網絡的輸入數據。
目前,飛參中導出數據只能使用采樣率為1點/s的方式,觀察發現每秒的數據變化量十分微小(變化精度為0.001),模型在處理分析過程中會有大量的冗余數據,影響了模型的學習效率。因此,在對慣導數據進行讀取時,采用1點/8s的方式進行采樣。測試結果表明,該采樣方式可確保數據特征不丟失,同時能極大地提高模型訓練速度。
本文用某型機4臺慣導5年的飛參數據集合作為慣導數據集來構建循環神經網絡模型,并基于過去多次實際標定情況作為模型事后評估預測的依據。
3 預測模型的建立及驗證
3.1 基于長短時記憶網絡的經典循環神經網絡預測模型的建立
循環神經網絡(RNN)通過循環核從時間維度提取數據特征,將提取到的特征送到全連接網絡(Dense)進行預測等操作。循環核具有記憶力,且不同時刻的參數能夠共享。目前,3種非常成熟的RNN網絡結構為RNN、LSTM和GRU。使用過程中發現,RNN建立的模型準確率與其他兩個網絡相比較低,但是網絡參數少,訓練速度較快;GRU在LSTM網絡的基礎上進行了優化,準確率更高,但是訓練速度較慢。因此,最終選擇了準確率較高、訓練速度較快的LSTM網絡。
本文將17余萬條飛行數據拆分為訓練集和測試集,并將這些數據輸入神經網絡,進行50個epoch(世代)的模型訓練,從而不斷優化模型參數,提高模型準確率。另外,訓練采用Batch Normal的方法,通過調整各層的激活值,使其擁有適當的廣度,提高了訓練速度,同時也有效抑制了模型過擬合的問題,最終生成具有97800個參數的模型文件。
最終形成的慣導模型有以下特點:模型由輸入X(也就是慣導數據)乘以權重W,再加上偏置項B,經過激活函數Activation進行輸出。激活函數的作用是:當(X·W+B)的值達到一定條件后才繼續往后輸出,避免了因模型過度線性化而產生的過擬合或欠擬合問題,因此可以擬合非線性的數據。模型是一個多層網絡:慣導數據為輸入層;內部網絡稱為隱藏層,是由權重和偏置項構成的復雜網絡;最終的預測結果稱為輸出層。神經網絡模型的準確率由Loss值來衡量。Loss反映了預測值與真實值之間的差距,Loss值越小,說明預測值更加接近真實值,也說明模型更準確。另外,神經網絡的訓練過程就是對權重和偏置項參數通過反向傳播梯度下降算法進行不斷地優化、調整,最終得到使Loss值最小的解;神經網絡的參數量非常大,可以達到上百萬甚至上千萬。
3.2 模型的驗證
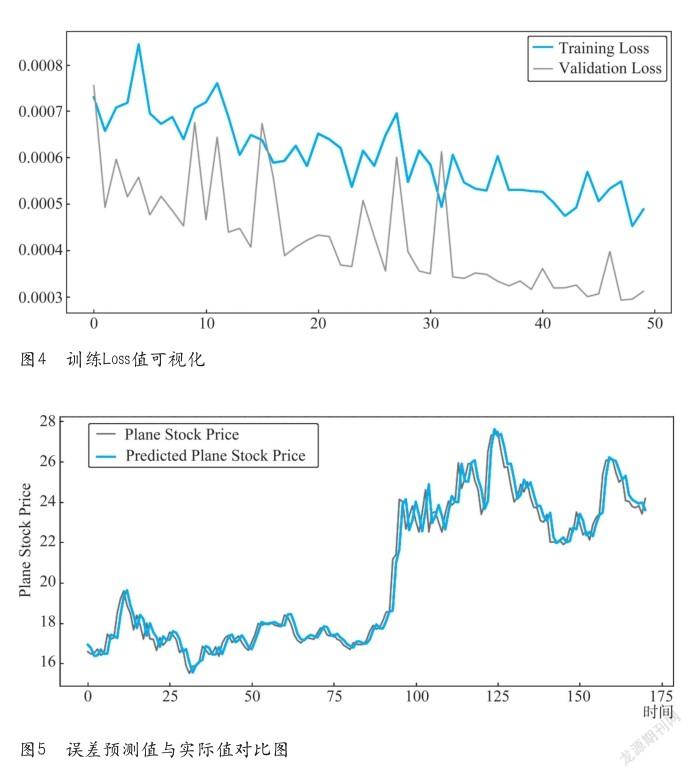
在機器學習的研究中,模型的準確程度是用模型的Loss值(也就是模型在訓練過程中使用的損失函數的值,一般使用均方誤差和交叉熵誤差)來衡量的。損失函數是表示神經網絡性能“惡劣程度”的指標,即當前的神經網絡對監督數據在多大程度上不擬合,在多大程度上不一致。從圖3 可以看出,隨著訓練epoch的不斷增加,神經網絡會不斷通過反向傳播梯度下降算法進行參數優化,模型訓練集的Loss值越來越小,測試集的Val_Loss值也慢慢減小。模型Loss值的變化規律如圖4所示。
模型訓練完成后,對其中某個架次的數據進行驗證,對比了誤差預測值與實際值的變化曲線,如圖5所示。

從圖5可以看出,二者基本重合。說明該模型能夠有效預測慣導誤差的變化趨勢,可以對未來一段時期的各指標誤差數據進行預測。用科學計算pandas庫對預測數據進行多維度分析,將各個誤差指標根據權重進行計算,輸入激活函數后得到一個慣導標定預測值,數值范圍為0~1。數值越接近0,說明該慣導越不需要標定;數值越接近1,則慣導近期內需要標定。同時,根據數值大小,系統給出了標定時間結論。
4 結束語
傳統的基于時間的預測方法已不適用于現階段視情維護的保障需求,需要構建一套綜合化的健康狀態監控管理系統。本文將循環神經網絡模型應用于慣導重標期的預測,將慣導實時飛行數據輸入模型中,基于人工智能方法對標定需求進行計算與預測,實現了對慣導重新標定的有效預測。通過對維修備件、工作計劃的合理策劃,提升機務維修保障效能。
參考文獻
[1]黃超. 基于最小二乘支持向量機的慣導系統精度評估方法研究[D].哈爾濱:哈爾濱工業大學,2019.
[2]程建華,劉明,王振民.基于陀螺儀輸出誤差觀測的冗余INS標定方法[J].中國慣性技術學報,2019,27(3):301-306,396.
[3]李光耀. 捷聯式慣性導航誤差標定和補償技術研究[D].西安:西安工業大學,2019.
[4]郭瑋林,鮮勇.智能方法在慣性系統誤差參數辨識中的應用[J].導航定位與授時,2019,6(3):11-20.
[5]陳會志. 基于深度卷積神經網絡的目標跟蹤算法研究[D].南京:南京郵電大學,2019.
[6]劉禮文,俞弦.循環神經網絡(RNN)及應用研究[J].科技視界,2019(32):54-55.
[7]張旭東,杜家浩.基于多尺度層級LSTM網絡的時間序列預測分析[J].計算機科學,2019,46(S2):52-57.
[8]趙四方,馬啟原,李鐵楠.基于LSTM網絡的短波天波信道分析及預測[J].艦船電子工程,2019,39(12):65-70.
[9]陳凱達,朱永生,閆柯,蔡依青,任智軍,高大為.基于LSTM的船舶航跡預測[J].船海工程,2019,48(6):121-125.
