一種土倉可視化伸縮攝像頭控制的國產(chǎn)化方案研究
2022-04-14 03:14:08陳新兵
科技創(chuàng)新導(dǎo)報 2022年25期
關(guān)鍵詞:可視化
陳新兵
(中國鐵建重工集團(tuán)股份有限公司 湖南長沙 410100)
我國已是世界上隧道及地下工程規(guī)模最大、數(shù)量最多、地質(zhì)條件和結(jié)構(gòu)形式最復(fù)雜、修建技術(shù)發(fā)展速度最快的國家[1]。盾構(gòu)作為機(jī)械化開挖的工程裝備,已經(jīng)在我國隧道及地下空間開發(fā)中得到了廣泛應(yīng)用[2]。盾構(gòu)開挖倉伸縮攝像頭能夠保證盾構(gòu)法開挖對于前方地質(zhì)情況準(zhǔn)確判斷,大幅提升開挖工作的安全性,目前已經(jīng)在越來越多盾構(gòu)機(jī)上得到應(yīng)用。伸縮攝像頭是一種適用于盾構(gòu)開挖倉環(huán)境的專業(yè)可視化設(shè)備,當(dāng)盾構(gòu)掘進(jìn)異常時,利用伸縮油缸將攝像頭伸進(jìn)土倉,觀察掘進(jìn)掌子面及刀盤實(shí)時情況,判斷是否存在結(jié)泥餅等異常狀態(tài)。盤體結(jié)構(gòu)泥餅、土倉中心泥餅、盤面泥餅使刀具失去切削作用,盾構(gòu)推力雖大但刀盤不能貫入,影響掘進(jìn)效率[3]。采用土倉可視化系統(tǒng),可在主控室內(nèi)清晰觀察土倉內(nèi)的中心結(jié)泥餅情況,為盾構(gòu)檢修、掘進(jìn)參數(shù)調(diào)整等提供可視化依據(jù),方便了調(diào)試和操作人員監(jiān)測、管理并完成掘進(jìn)狀態(tài)診斷[4]。
1 伸縮攝像頭控制的原理概述
伸縮攝像頭具備機(jī)器視覺功能,依賴搭載的伸縮電缸將攝像頭送入土倉環(huán)境實(shí)現(xiàn)。伸縮攝像頭電缸包括伸縮電缸和驅(qū)動其旋轉(zhuǎn)的回轉(zhuǎn)機(jī)構(gòu),其整機(jī)外形如圖1所示。
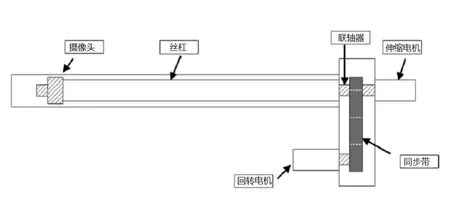
圖1 整機(jī)外形圖
伸縮電缸的伸縮由伺服電機(jī)驅(qū)動絲杠螺母實(shí)現(xiàn),頭部搭載有攝像頭,行程為2000mm;回轉(zhuǎn)驅(qū)動主要用于帶動攝像頭繞軸線旋轉(zhuǎn),回轉(zhuǎn)由伺服電機(jī)驅(qū)動同步帶,帶動電缸整體作±180°旋轉(zhuǎn),旋轉(zhuǎn)速度0~5r/min。伸縮、回轉(zhuǎn)電纜通過拖鏈實(shí)現(xiàn)。
由于土倉空間有限,為了精確控制可視化角度和防止攝像頭等設(shè)備損壞,機(jī)構(gòu)的伸縮行程和回轉(zhuǎn)角度必須嚴(yán)格保證,通常行程控制精度要求±0.2mm,回轉(zhuǎn)角度精度要求±0.1°。由于常規(guī)的電機(jī)控制精度在±0.5mm 以上,無法滿足此機(jī)構(gòu)控制要求,此方案采用伺服控制。同時,由于盾體空間狹小,對驅(qū)動器的尺寸有嚴(yán)苛要求,需要使用緊湊型控制單元。目前,市場上可選的、具有成熟應(yīng)用市場的伺服控制器還是依賴進(jìn)口,以西門子V90 系統(tǒng)為代表的伺服驅(qū)動器占據(jù)大部分市場。
隨著我國重工設(shè)備自主知識產(chǎn)權(quán)化、核心技術(shù)國產(chǎn)化的要求不斷提升,進(jìn)口品牌控制器還存在購入成本高、技術(shù)資料復(fù)雜、應(yīng)用門檻高等不足,且目前受國際芯片危機(jī)影響,進(jìn)口設(shè)備普遍貨期增長,其采購周期嚴(yán)重影響到項(xiàng)目執(zhí)行效率。因此,研究國產(chǎn)化控制器替代方案有重大意義。在充分獲取西門子V90的應(yīng)用特性后,本文尋求可行的國產(chǎn)化替代方案,并研究其應(yīng)用于盾構(gòu)土倉伸縮攝像頭控制的可靠性。
2 國產(chǎn)化實(shí)驗(yàn)
2.1 硬件配置
本方案盾構(gòu)項(xiàng)目盾構(gòu)開挖倉伸縮攝像頭改造前的伺服驅(qū)動控制采用西門子V90,電機(jī)采用西門子1FL系列,配備20位+12位多圈絕對值編碼器,在無硬件限位的情況下,最多能記錄4096圈,否則計數(shù)溢出,而在溢出情況下斷電,無法保存當(dāng)前位置。在不改變機(jī)械結(jié)構(gòu)的情況下,結(jié)合此項(xiàng)目,最大安全行程為1024mm,伸縮電缸的最大伸出距離受限。
此方案已有2年左右的應(yīng)用時間,為了解決國外品牌價格高、貨期長的問題,擬用匯川伺服控制器作為進(jìn)口品牌西門子V90 的替代產(chǎn)品,電機(jī)也同步更換為匯川MS1系列,配置參數(shù)對比如表1所示。

表1 配置對比
所選匯川伺服控制器型號可靈活選用單相/三相電源供電,支持高速百M(fèi) 級Profinet 總線通信,并支持豐富的報文應(yīng)用,包括伺服控制標(biāo)準(zhǔn)報文1、標(biāo)準(zhǔn)報文3、西門子標(biāo)準(zhǔn)報文102、西門子標(biāo)準(zhǔn)報文111、西門子標(biāo)準(zhǔn)報文105、西門子標(biāo)準(zhǔn)報文750、西門子標(biāo)準(zhǔn)報文850 報文等各類標(biāo)準(zhǔn)報文,軟件可無縫應(yīng)用之前的伸縮攝像頭程序,極大地減少了國產(chǎn)化過程中編程的工作量。經(jīng)過調(diào)研,匯川伺服控制在軟硬件上都可完全替代進(jìn)口品牌。另外,此控制器可支持配置23位電子多圈絕對值編碼器,配備編碼器電池,開挖倉伸縮攝像頭應(yīng)用中不存在計數(shù)溢出問題,并且在尺寸上,該產(chǎn)品較進(jìn)口品牌伺服控制體積更小,在寸土寸金的盾構(gòu)機(jī)盾體土倉更具優(yōu)勢。方案整體硬件配置如圖2所示,使用“一網(wǎng)到底”模式[5],由同一個Profinet 網(wǎng)絡(luò)連接PLC、HMI、控制器,使用的硬件如下。

圖2 硬件配置
(1)PLC:CPU 1516-3 PN/DP;訂貨號:6ES7 516-3AN01-0AB0;HMI:西門子精簡系列面板KTP1200 Basic PN立式。
(2)控制器:IS620FS5R5I。
(3)電機(jī):MSH1-75B30CB-A331Z(絕對值編碼器)。
2.2 軟件配置
項(xiàng)目使用西門子TIA Portal V15平臺[6]編程,項(xiàng)目中需要安裝IS620F PN 的對應(yīng)GSD 文件,在網(wǎng)絡(luò)視圖中添加IS620F 設(shè)備并創(chuàng)建與PLC 的網(wǎng)絡(luò)連接,添加后的項(xiàng)目網(wǎng)絡(luò)視圖如圖3所示。

圖3 網(wǎng)絡(luò)配置
S7-1500 可以通過PROFINET 通信連接IS620F 伺服驅(qū)動器,使用EPOS(基本位置控制)模式,對驅(qū)動進(jìn)行控制,該模式位置規(guī)劃是在伺服內(nèi),只需要使用FB284 功能塊把相關(guān)的目標(biāo)速度、目標(biāo)位置和加速度等信息送到伺服內(nèi),伺服實(shí)現(xiàn)位置規(guī)劃和速度規(guī)劃。
EPOS 基本定位控制需要對在驅(qū)動設(shè)備視圖內(nèi)組態(tài)西門子標(biāo)準(zhǔn)111 報文,并在程序中調(diào)用FB284 程序塊,F(xiàn)B284塊的管腳HWIDSTW及HWIDSZW需要設(shè)置為111報文的硬件標(biāo)識符(見圖4)。

圖4 報文配置和硬件標(biāo)識符組態(tài)
2.3 后臺軟件對比
西門子V90 采用SINAMICS V-ASSISTANT(見圖5a),V-ASSIATANT調(diào)試軟件基本功能有選擇驅(qū)動、選擇報文、配置網(wǎng)絡(luò)、設(shè)置參數(shù)、監(jiān)控狀態(tài)及測試電機(jī)和優(yōu)化驅(qū)動,參數(shù)設(shè)置采用可視化向?qū)В笈_軟件和設(shè)備通信可選擇USB和Ethernet連接。
匯川SI620F 采用InoDriverShop,詳見圖5(b),具有選擇驅(qū)動、選擇報文、配置網(wǎng)絡(luò)、設(shè)置參數(shù)、監(jiān)控狀態(tài)及測試電機(jī)和優(yōu)化驅(qū)動等基本功能,軟件具有可視化安裝向?qū)В笈_軟件采用伺服驅(qū)動器RS232 通信用電纜,方便單機(jī)調(diào)試。可見在后臺軟件上,匯川和進(jìn)口品牌一樣直觀簡潔,操作簡單。
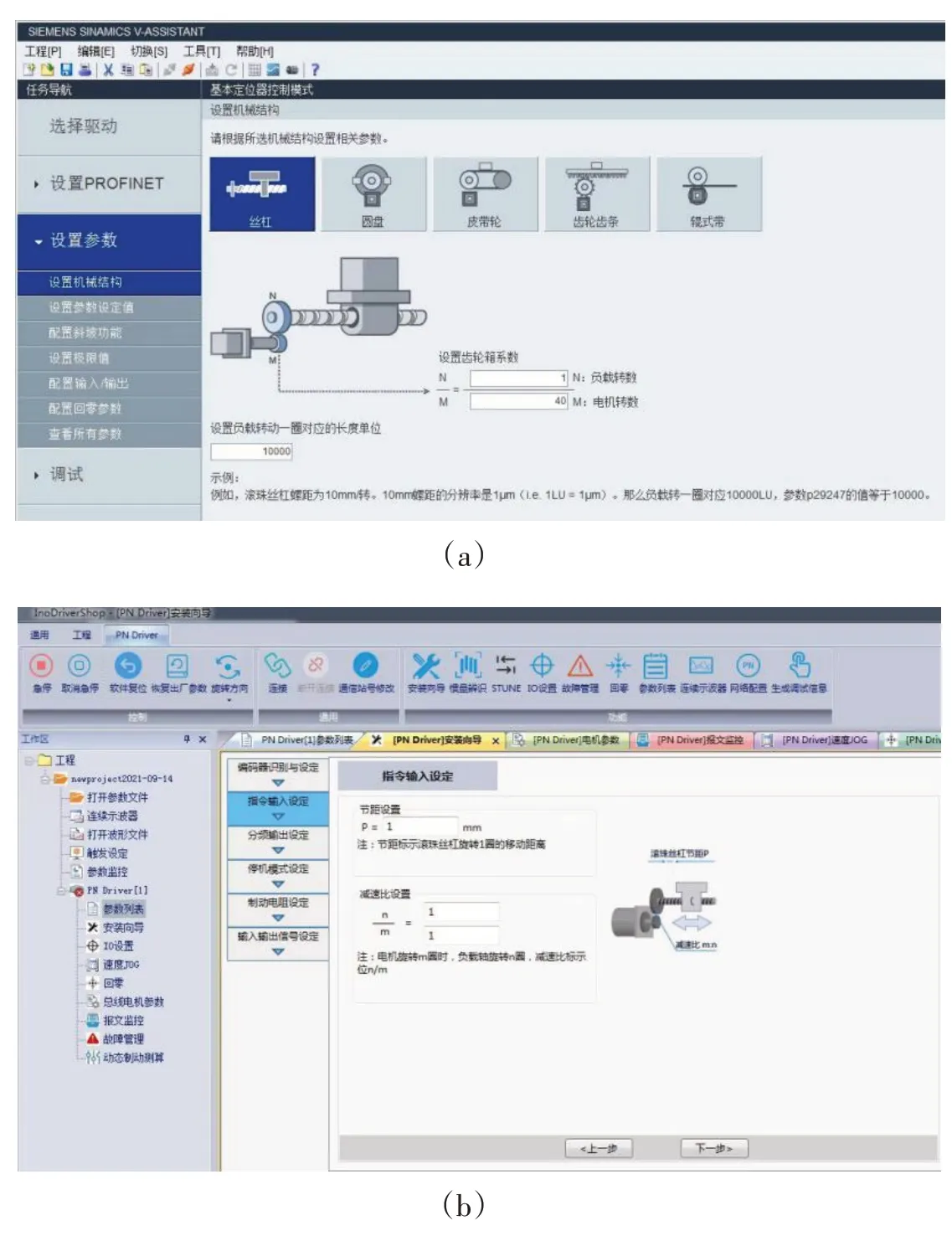
圖5 界面比較
2.4 性能測試
完成程序組態(tài)和編譯后,對此系統(tǒng)進(jìn)行加減速響應(yīng)和位置控制精度測試,測試方法如下。
使用匯川后臺軟件InoDriverShop,對電子齒輪比、加減速時間進(jìn)行如下設(shè)置并下載:
電子齒數(shù)比1(分子)H0507=8 388 608
電子齒數(shù)比1(分母)H0509=10 000
Epos最大加速度值H1302=2
Epos最大減速度值H1304=5
程序中先賦值Position 為-100000,在運(yùn)動過程中更新Position為100000,考察加減速過程的響應(yīng)速度及動態(tài)控制精度。
ExecuteMode的上升沿觸發(fā)定位運(yùn)動,電機(jī)開始加速,理論加速時間為5s,實(shí)測5s。
更新position 設(shè)置后,電機(jī)先減速,理論減速時間2s減到速度為0,接著電機(jī)反向加速5s,到達(dá)設(shè)定速度運(yùn)行,再減速2s,最終位置停在100000,運(yùn)行曲線如圖6所示。
從圖6可見測試結(jié)果機(jī)構(gòu)動作響應(yīng)迅速,無論是加速時間還是減速時間,都和設(shè)定參數(shù)保持一致,并且位置顯示與實(shí)際測得的距離偏差在預(yù)先設(shè)計范圍以內(nèi),符合控制要求。

圖6 運(yùn)行曲線
通過以上性能測試,驗(yàn)證了匯川IS620F 的控制響應(yīng)特性和實(shí)際控制精度,證明此產(chǎn)品理論上可以實(shí)現(xiàn)伸縮攝像頭的運(yùn)動控制。
實(shí)際項(xiàng)目中,電子齒輪比需要按實(shí)際機(jī)械設(shè)計參數(shù)配置,并按設(shè)計要求配置好加減速時間及運(yùn)行速度。
現(xiàn)場根據(jù)使用需求,重復(fù)給定不同伸縮位置及旋轉(zhuǎn)角度,并分別記錄顯示和實(shí)測數(shù)據(jù)實(shí),并和西門子V90測試參數(shù)對比,對比結(jié)果如表2、表3、表4所示。

表2 伸縮精度對比

表3 回轉(zhuǎn)角度精度對比

表4 測試結(jié)果對比
上述表格表明,國產(chǎn)伺服驅(qū)動與西門子伺服驅(qū)動的伸縮精度相同,回轉(zhuǎn)角度精度相同,皆滿足伸縮攝像頭的設(shè)計要求精度,并且國產(chǎn)伺服驅(qū)動伸縮攝像頭由于配置23位電子式多圈絕對值編碼器,實(shí)際安全伸出最大長度比西門子伺服驅(qū)動配置的12 位多圈絕對值編碼器的伸縮攝像頭電缸伸出最大長度長。
3 結(jié)語
本文從尺寸、硬件配置、軟件設(shè)計、性能比較、后臺軟件及實(shí)際測量數(shù)據(jù)對比等多方面對進(jìn)口品牌西門子V90 和國產(chǎn)品牌匯川IS620F 進(jìn)行了全方位的對比,可確認(rèn)匯川SI620F能夠完成西門子V90的替代。由此可見,本文實(shí)現(xiàn)了國產(chǎn)化方案的應(yīng)用驗(yàn)證,完成了對國外伺服系統(tǒng)的替代。
猜你喜歡
江蘇安全生產(chǎn)(2022年7期)2022-08-24 02:11:52
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
北京測繪(2022年6期)2022-08-01 09:19:06
選煤技術(shù)(2022年2期)2022-06-06 09:13:12
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
山東農(nóng)業(yè)工程學(xué)院學(xué)報(2019年11期)2020-01-19 02:49:22
傳媒評論(2019年4期)2019-07-13 05:49:14