風光互補發電系統在路燈上的研究及應用
2022-04-14 04:52:30付一杰孫彥武魏立明
日用電器 2022年3期
付一杰 孫彥武 魏立明
(吉林建筑大學 電氣與計算機學院 長春 130118)
引言
目前由于傳統化石燃料對環境造成的巨大傷害,能源公司越來越重視可利用再生太陽能和風能。在實際發電過程中由于太陽光照條件和風力等級的不可預知性,會導致發電系統的能源利用率無法達到最大化[1]。隨著國內學者對風光互補路燈系統的認識逐漸完善,發現其與傳統并網路燈相比,不再需要較多的配套設施和較長的設計周期,在實際應用方面能夠極大的節省設計成本。傳統并網運行的路燈的調控極度依賴人工操作,卻仍然會出現調控時間上的誤差。傳統路燈無法根據人流情況和道路光線情況實時調控路燈的開關,進而造成社會資源極大的浪費。根據以上提出的傳統并網運行的路燈的使用限制,本文所提出的風光互補路燈具有的傳感器能夠通過外部條件的變化調節工作時間,并達到較高的能源轉化率。并且基于TMS320F2812芯片的風光互補路燈控制系統還具有對發電系統最大功率追蹤的控制策略以及調控蓄電池的充放電過程,并通過試驗驗證控制器的有效性。
1 風光互補路燈系統總結構
風光互補路燈系統總結構如圖1所示,其中包括發電部分、控制部分、電能儲存和使用部分[2]。由于太陽能供給相對穩定,并且光伏電池板能夠直接將光能轉化為直流電,即使不另設整流電路,該部分的不穩定性也不會對整個系統造成較大影響。而風能發電系統,由于風力等級的變化較大,導致系統輸出電壓不穩定[3]。所以當該系統的輸出功率過大時,須加裝卸載電路,以免整個系統受到損壞。蓄電池一方面用于儲存發電系統中生成的能量,另一方面用于當風能和光伏不能及時提供電能時對路燈進行電能輸送。因此,蓄電池的存在保證了整個系統持續供電的能力,也起到了平衡和調節的作用。
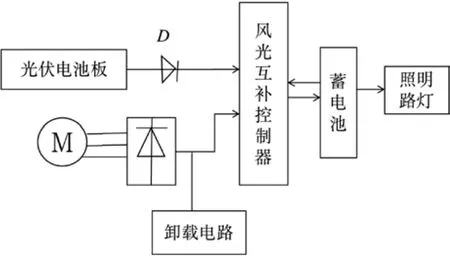
圖1 風光互補路燈系統結構圖
2 風光互補路燈系統控制策略
2.1 風光互補最大功率點跟蹤控制策略
根據風能發電的特點得知,葉尖速比法和功率反饋控制法都是根據反饋信息調節風機的轉速,進而獲取最大輸出功率。與以上兩個方法相比,爬山法[4]不需要再檢測風速和風機功率特性,在降低成本的同時也比較容易實現。而光能發電系統中獲得最大光能輸出功率的常規辦法有:①導納增量法[5];②恒定電壓法[6];③擾動觀察法[7]。擾動觀察法是對輸出參數給予一定的數值干擾,并利用對比干擾前后輸出功率的變化規律調整控制系統運行參數,直至追蹤到最高輸出功率點。
針對上述常規辦法無法準確追蹤問題,本文采用變占空比步長擾動法的MPPT控制策略。通過前后兩次輸出功率之間的差距自適應調節占空比的大小,由于傳統控制策略實現的過程中速度和精度不能隨著擾動的步長變化而變化,導致出現大步長跟蹤速度較快,但精確度差的現象。但是將大步長調節為小步長后,追蹤速度變慢出現控制效率低下的情況。變步長占空比擾動觀察法控制圖如圖2所示。當MPPT開始時,首先測量當前電壓和電流,P(k)代表當前輸出功率、P(k-1)代表上一次輸出功率。而擾動步長大小則通過輸出變化量Q進行調節,通過施加跨度較大的擾動來適應改變量較大的情況以增加追蹤效率,此時為大步長擾動;通過減小擾動的跨度來適應逐漸逼近最大功率的情況以此增加追蹤的精度,此時為小步長擾動。除此之外,在MPPT過程中,設定一個數值ξ,當輸出功率的變化量|dP|<ξ時,系統已找到最大功率點,同時停止了擾動。而數值的大小會影響控制策略的追蹤效率。
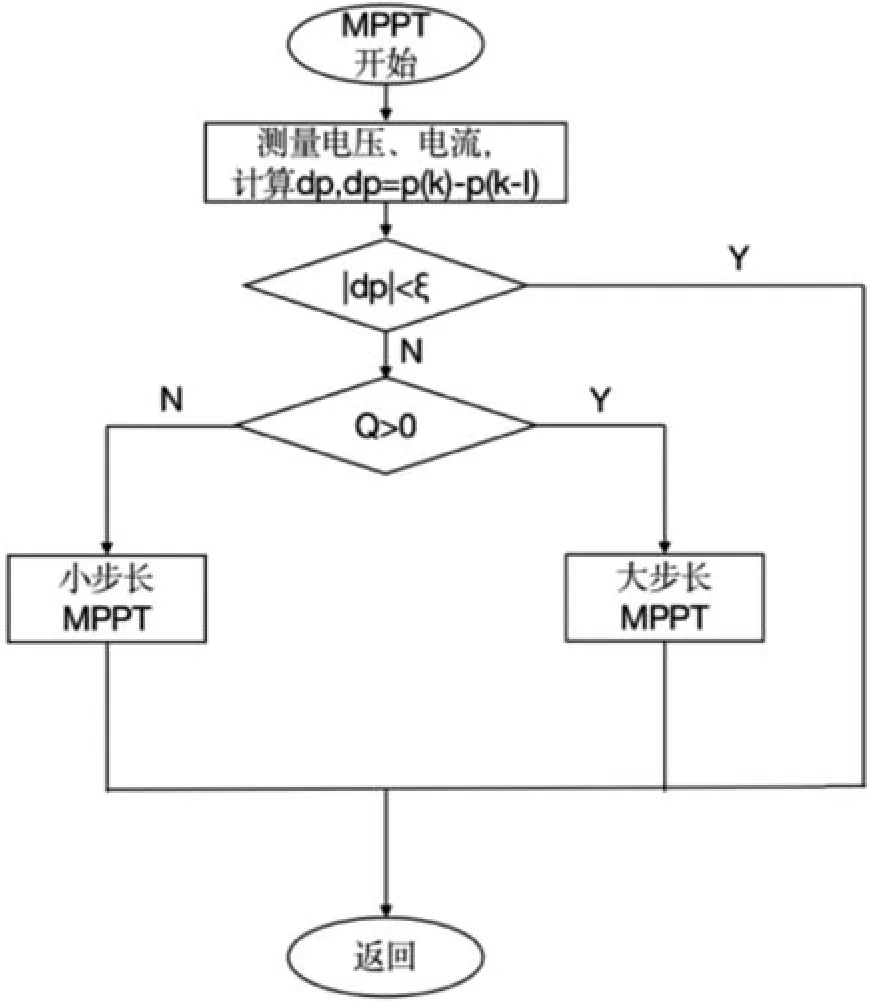
圖2 變步長占空比擾動觀察法控制圖
2.2 蓄電池充放電控制策略
蓄電池充電方式有恒壓充電、恒流充電、分段式充電[8]等。本文將采用12 V鉛酸蓄電池進行三段式優化充電法。三段式優化補充法可簡要概括為三個階段,第一階段電流按照恒定值進行充電,當電壓上升到閾值電壓時停止恒流充電。這時蓄電池電量能達到百分之七十到百分之九十之間;當電能儲備一定時,電壓也將達到閾值,并且充電電流會減小到標準值以下;因此第三階段會采用標準值電流使蓄電池電池充滿電[9]。綜上所述,三段式充電法按照蓄電池的設計原理盡可能地避免在充電過程中對電池造成傷害,進而減小了該器件更換的頻率。
3 控制器的硬件設計
控制器的硬件核心是由TMS320F2812構成的,其主要用途是使控制芯片按照其內嵌控制策略對外部系統實施調控。它擁有32位的CPU,可實現C/C++匯編語言,同時進行16bit×16bit和32bit×32bit的MAC運算。
本文中TMS320F2812DSP處理器的主要功能有:采集太陽能、風能產生的電壓、電流及蓄電池的電壓、電流;最大功率點追蹤優化;蓄電池充放電的控制等功能。其結構如圖3所示。

圖3 風光互補路燈控制功能圖
3.1 控制電路設計
控制電路的設計可分為四個部分,分別是電壓采集設計、電流采集設計、驅動電路設計及卸載電路設計。
1)電壓采集
電壓采集選用了用價格較低的運放電路,如圖4所示。工作時僅需外接一個電源,所以該采集電路擁有設計成本和硬件成本小、精度高的特點。在電路中的R1、R2選用了阻值較大的電阻,精確度為百分之一。而電路中的電容實現濾波作用則是減少對采樣信號的影響。

圖4 電壓采集電路圖
2)電流采集
本文選用LA25-NP構成電流采集電路。如圖5所示,傳感器輸入端接系統電路,輸出端將電流信號轉換為電壓信號。除此之外,在使用時傳感器需接外部電源且在輸出端接入接地電阻R3。
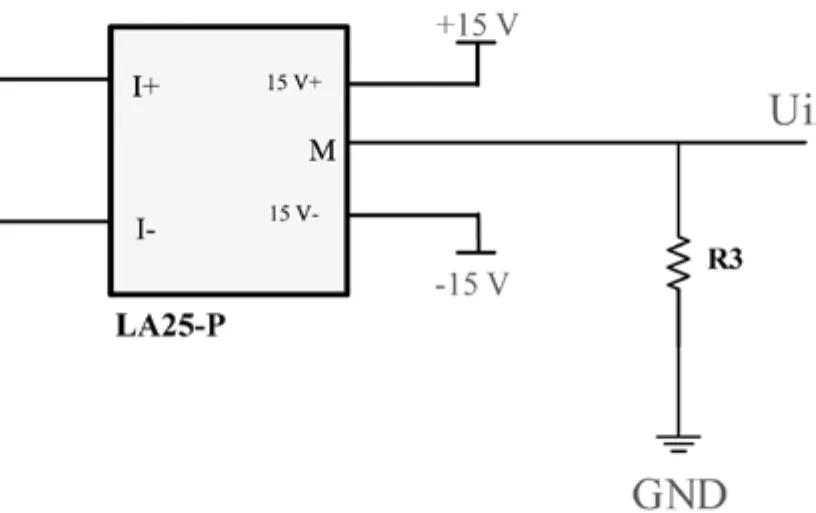
圖5 電流采集電路圖
3)驅動電路
在驅動電路方面,如圖6所示,本文基于TLP250光耦合器對其進行構建。當處于高電平的脈沖寬度調制信號從輸出端發出時,經過光耦合器的處理,可直接對金氧半場效晶體管進行驅動。
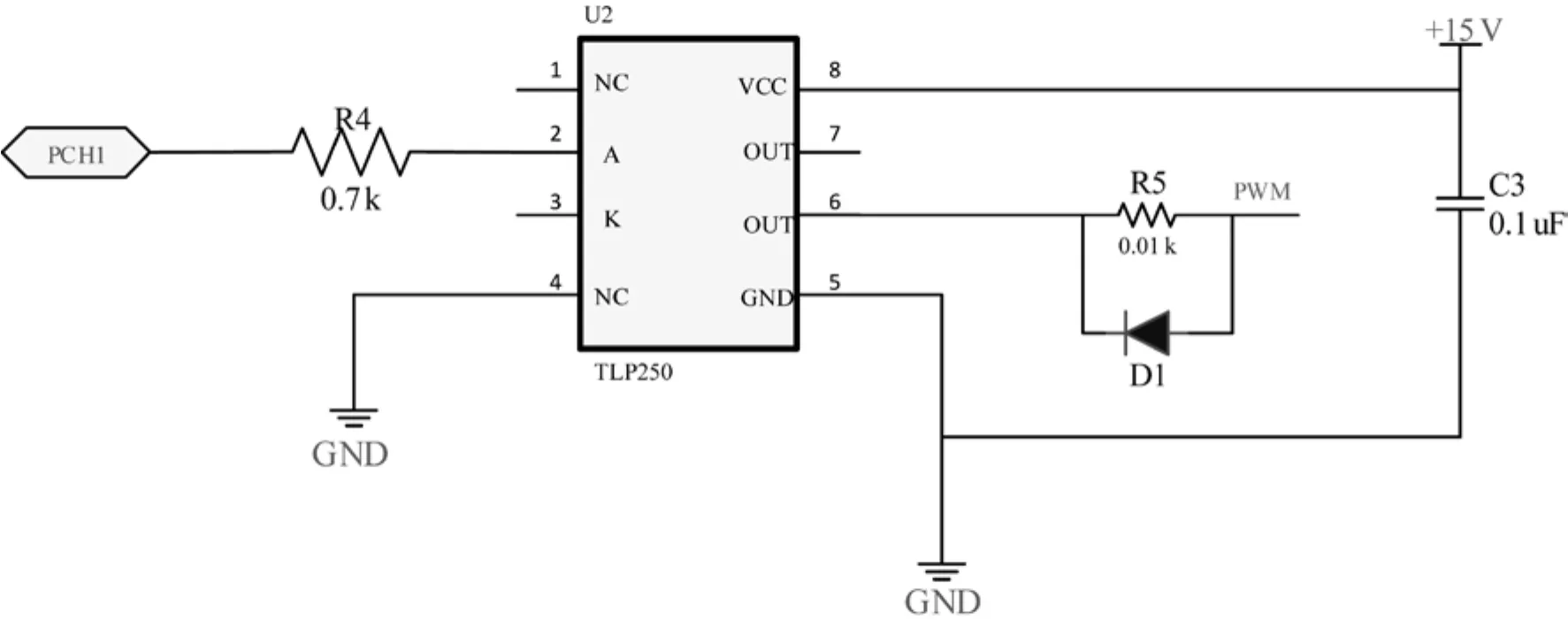
圖6 驅動電路圖
4)卸載電路
為了維持系統的穩定,防止風速過大其轉換的電能過多對電路的影響,會增加卸載電路,如圖7所示。且風能的不確定性,產生電壓也及其不穩定。開關管因單限比較器而產生了非線性,同時開關頻繁切換導致抗干擾力弱[10]。故該電路采用滯環比較控制法。
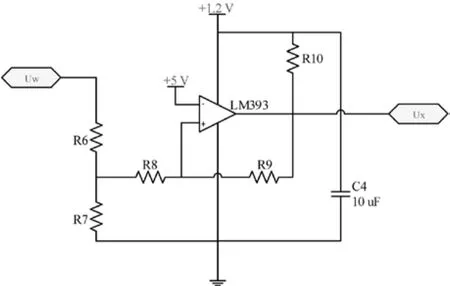
圖7 卸荷控制電路圖
4 系統軟件設計
從系統運行時開始進入到初始化狀態,這一階段是對即將使用的模塊進行參數設置及調整。隨后系統對風力、光伏及蓄電池產生的電流、電壓進行實時監測和采集,通過對采樣結果的分析及時選擇相對應的系統運作模式。當需對負載供電時,直接使用蓄電池對其放電。當蓄電池電力不足時,則需先判斷蓄電池當前工作模式并采用優化充電法對其進行充電。
5 實驗結果
如表1所示為各個時刻的轉換率。通過對風力、光伏產生電能的電流和電壓實時監測和蓄電池的輸出電流、輸出電壓的實時監測。得出電路的輸入功率和輸出功率,其比值則為轉換率。
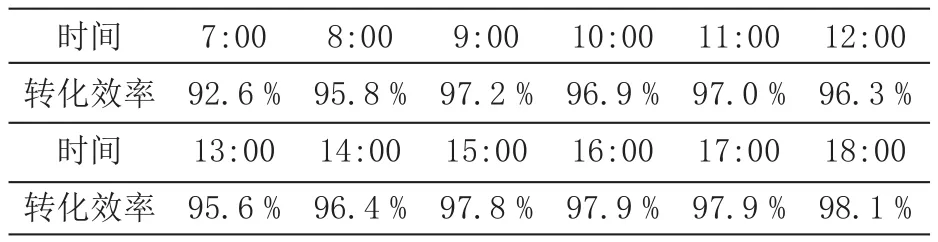
表1 各個時間段轉化效率
如圖8所示系統首先對蓄電池進行充電。由于充電電流的上升,輸出電壓也隨之增長。之后進入過電壓充電階段,但由于溫度和風力的不穩定,輸入電流和電壓波動幅度大,輸入功率持續處于最大值左右。在正午時刻,溫度、光照和風力都相對穩定,輸出效率也是最大。由于實驗誤差受驅動電路精度不夠而變大,但在不影響整體效率基礎上,使充電時長達11 h的效率達到92 %以上。
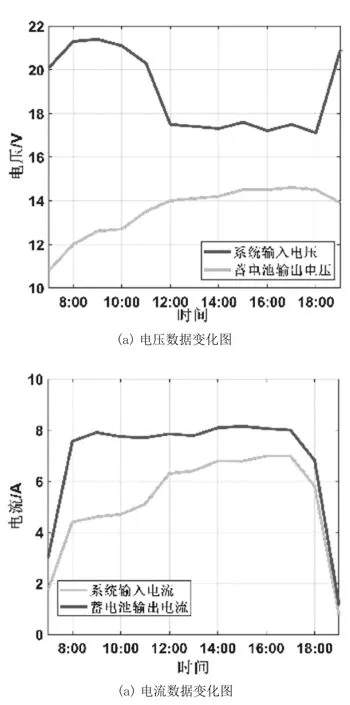
圖8 實驗中電壓和電流數據變化圖
6 結論
本文對具有TMS320F2812芯片控制器的風光互補技術的路燈系統進行了實驗,證明了該系統能夠滿足路燈的實際使用需求以及具有優秀的能量轉化率。并且,該芯片內嵌的變步長占空比擾動法能有效實現發電系統的最大功率點追蹤以及三段式充電法保證了蓄電池的平穩運行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
