基于圖像識別的智能輪椅的設計*
2022-04-14 10:00:46閩南科技學院張榮輝鐘宇帆
數字技術與應用 2022年3期
閩南科技學院 張榮輝 鐘宇帆
本設計實現一款智能輪椅,該系統在保證輪椅傳統功能的基礎上集成有手勢遙控方便手部殘障人士對輪椅主體的操作;防撞功能能夠在設定的距離內弱報警、強報警以及強制剎車,在此功能下擁有人機互動界面可通過液晶屏幕直觀看輪椅相對前方障礙物距離;基于輪椅上的攝像頭來實現跟隨,方便解決腿腳不便的老齡人以及肢體殘障人士獨自出行、康復訓練等問題。
隨著生活水平不斷提高,醫療保險和社會福利的不斷完善,人的平均壽命也隨之增長,老年人群中腿腳不便者不在少數;隨著經濟發展和社會進步,腿腳不便的殘疾人士的生活水平也受到了社會各界的關注[1]。針對這兩類特殊人群,輪椅的重要性不言而喻。本設計實現一款智能輪椅,為腿腳不便這類人群的出行提供切實的保障[2]。
1 設計方案
本系統的設計,圍繞著微型控制器的最小系統展開設計,在輪椅車體以及配套遙控器的組合下整體功能包括了圖像識別跟隨、防撞距離可視化、可設定障礙物距車體不同距離的強弱報警以及手勢姿態配合觸摸按鍵控制等人性化操作功能,可滿足上文中所提及的特殊人群實際生活中的需求。其系統組成框圖如圖1所示。
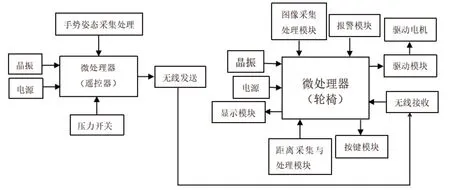
圖1 系統組成框圖Fig.1 The block diagram of system composition
整體的輪椅系統分為兩部分,這兩個部分通過射頻進行無線通訊。第一部分遙控器以選定芯片作為中控通過觸摸按鍵啟動,體感模塊采集手部姿態數據經過處理傳給輪椅,輪椅根據指令進行前后左右移動。第二部分輪椅搭載距離感知模塊、攝像頭模塊來分析處理距離以及與跟隨相關的數據從而實現對應功能,同時可以通過按鍵設定功能模式以及設定防撞距離。
2 硬件選型設計
2.1 微型控制器
本設計采用STM32F103C8T6這款芯片作為兩部分系統的核心。選擇這款芯片的原因在于其擁有ARM的32位運算內核,64K的閃存存儲器和20K字節的RAM,三個通用定時器以及一個高級定時器,可支持SPI、I2C、USART、USB、CAN等協議。CPU頻率可至72MHz。在外部性能上擁有32個通用IO端口。滿足此次設計中較為復雜的運算過程。
2.2 觸摸開關選型
為了讓遙控器更加人性化,手握遙控器并且按壓所選的觸摸傳感器時,遙控器才向輪椅發送相關的動作指令,若不按壓觸摸傳感器則不發送動作指令,輪椅就不會根據手部姿態移動,以此達到遙控器隨取隨用,隨放隨關的效果。選擇基于觸摸檢測芯片TTP223B的電容式觸摸開關模塊,此模塊初始為高電平,觸摸時位低電平,可根據此電平邏輯設計上述功能。
2.3 無線收發模塊選型
對于兩部分系統的無線傳輸,選定NRF24L01這款工作頻率在2.4G的射頻收發器件,單個器件同一個時間點只能接收或者發送,即半雙工,若采用全雙工需要配合軟件的分點切換。本設計中只需要半雙工即可滿足需求。NRF24L01高速率收發、低功耗、可選頻段眾多,再加上應用簡單等優點[3],適用本設計中兩部分系統的無線通訊。
2.4 圖像處理模塊選型
這款模塊的選擇重要性不亞于核心芯片的選擇。作為輪椅系統的機器視覺,要有初步類似人類視覺的功能。OPENMV模塊擁有基于MicroPython的機器視覺模塊,可以說是“世界最簡單的機器視覺模塊”[4],可以被集成在任何項目中,可以與此次所選芯片結合使用。
2.5 手部姿態模塊選型
這類型模塊的作用在于實時采集手部姿態的數據并且進行實時解算,換算成所需要的控制指令再發送到輪椅部分實現手勢控制的功能。選定MPU6050模塊來完成手部姿態數據采集。MPU6050傳感器中集成了陀螺儀和加速度計,前者可以測量角度,后者測量加速度。而其中最重要的便是MPU6050成熟的姿態融合算法方便開發與使用。
3 軟件設計
選用STM32芯片做為核心,使用Keil5軟件編程環境配合C語言進行仿真調試后,燒錄可執行文件至微型控制芯片中,實現兩個部分系統對所搭建的外圍硬件電路的控制,來達到設計預期的功能。整體系統分為兩個部分,第一部分為遙控器,實時采集手勢信息以及可通過是否按壓觸摸按鍵來決定前后左右等移動指令的發送。第二部分為輪椅,實時接收遙控器的指令,在OLED屏幕上實時顯示對正前方障礙物的距離,可通過按鍵設置防撞距離、手控模式、視覺跟隨模式。擁有弱報警、強報警以及緊急制動功能。在程序編程中,設定K1按下為減少強制制動的感應距離操作,K2按下為增加強制制動的感應距離操作,K3按下為確定當前設定距離而再次按下K3為取消當前設定距離,K4按下為智能跟隨設置再次按下為取消該設置。
3.1 輪椅部分主程序
輪椅部分的程序設置相對較為復雜,其中包括了人機交互界面實時顯示障礙物距離及當前模式、聲音強弱報警制動功能、攝像頭采集圖像數據跟隨功能、功能按鍵設定距離以及切換模式。一共設計4個按鍵,分別對應減少制動距離、增加制動距離、確定距離設置以及確定跟隨模式四個功能。整體輪椅部分主程序流程圖如圖2所示。
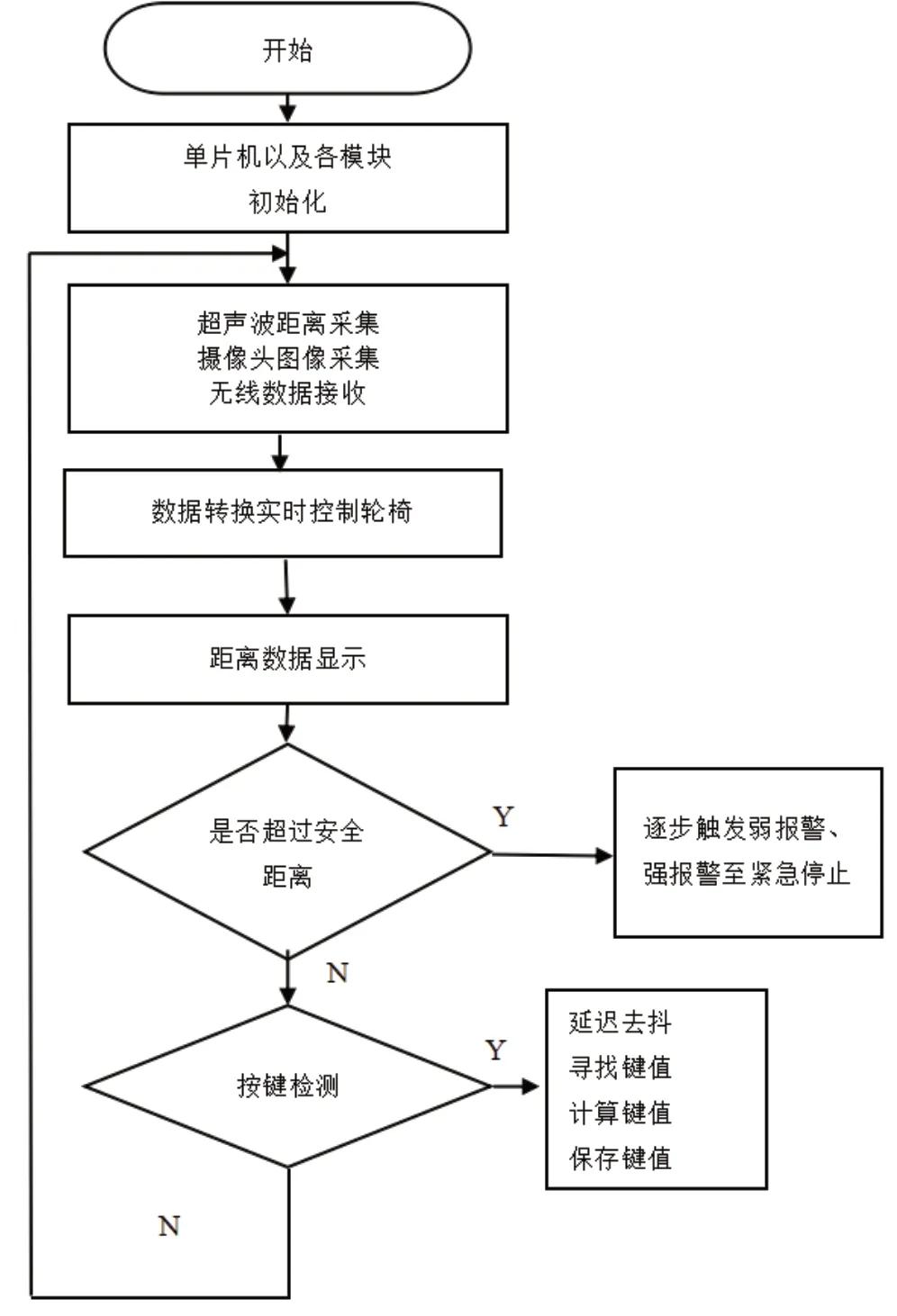
圖2 輪椅部分主程序流程Fig.2 Main program flow of wheelchair
3.2 遙控器部分主程序
相對于輪椅部分的主程序,遙控器部分的主程序比較簡單,具體如觸摸按鍵做為整體遙控器的啟動開關,只有持續按壓觸摸傳感器才可以啟動遙控器,松開觸摸傳感器則關閉遙控器的控制功能,整體系統采用NRF做為無線傳輸載體,使用MPU6050體感傳感器采集手部姿態經處理成動作指令信息后發送。整體遙控器部分主程序流程圖如圖3所示。
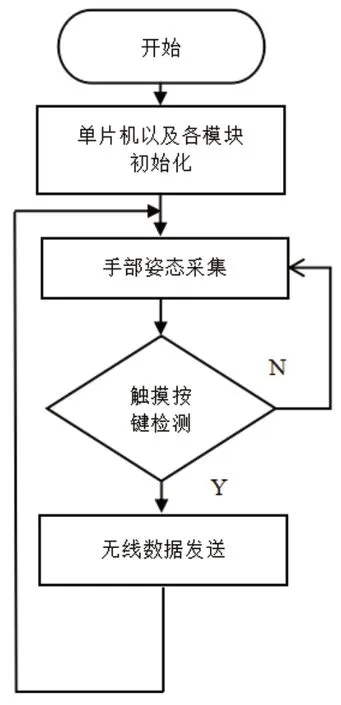
圖3 遙控器部分主程序Fig.3 Main program of remote controller
3.3 攝像頭圖像采集程序設計
攝像頭采集做為智能跟隨系統中最為核心的部分,其主要的功能就在于實現機器視覺可鎖定跟隨特定的標志物,而攝像頭跟隨物體移動的參數經芯片解析傳回主控制芯片,再經過主控制芯片的編碼判斷來執行智能跟隨的具體動作。利用攝像頭識別特殊的物品標志,來起到跟蹤的效果。攝像頭捕獲每一幀圖像的數據傳回主控芯片進行數據分析,用RGB三原色轉HSV算法以及圖像腐蝕算法進行處理[5],從而得出目標標志在空間中的位置和大小,以此來判別跟隨方向。攝像頭模塊功能流程圖如圖4所示。
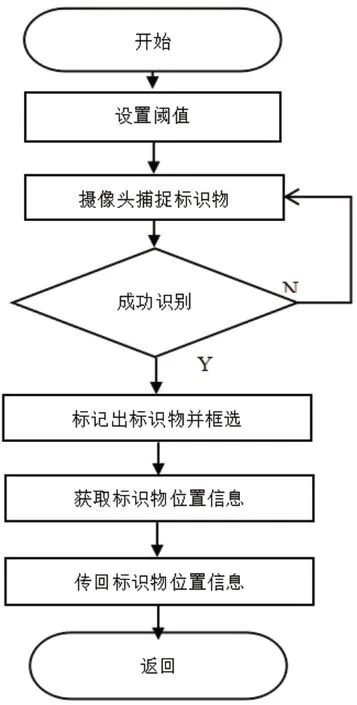
圖4 攝像頭模塊功能流程圖Fig.4 Function flow chart of camera module
4 結語
本設計基于圖像識別得到自動跟隨防撞輪椅,致力于解決腿腳不便的老年人以及殘障人士這兩類社會特殊群體在現實生活中所面臨的出行困難。能讓殘障人士能在能力范圍內最大幅度實現獨立生活起居,從而減輕看護人的工作量和看護時間,這對于家中有老人或者下肢癱瘓者的獨生子女,上班族來說無疑會是一大助力。圍繞這一點初衷,采用手勢控制的操作方式,也就是作品名稱中的體感。腿部受傷的傷員在復健時,訓練器材位置不定,傷員需要常常移動,如果輪椅能緊緊跟隨,在訓練強度達到需要休息時,能立刻坐上輪椅返回休息區,對傷員來說會是很大的一個便捷。圍繞著這個需求設計了跟隨功能,利用攝像頭識別特殊的物品標志,來起到跟蹤的效果。
本設計仍然有值得完善的地方,例如危險距離報警這方面功能可再添加一個光報警,達到聲光雙重報警的效果。提高距離的測量精度,可以使得整體系統的安全性得到提升。隨著互聯網的迅速發展,各類電子產品功能層出不窮,各個電子發燒友的想法也是豐富多彩。對于體感跟隨康復輪椅后期還會加入手機藍牙控制功能、手機遙感控制功能、特定語音指令控制功能等,這些功能的加入能夠讓輪椅在功能上更加全面,也能夠滿足年輕的殘障人士對新一代電子產品的喜愛與追求。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55