果園仿形風送噴霧機構設計與試驗**
2022-04-13 04:02:58房開拓周良富尤麗華
中國農機化學報 2022年3期
房開拓,周良富,尤麗華
(1.宿遷學院機電工程學院,江蘇宿遷,223800;2.南京工業職業技術大學工程技術實訓中心,南京市,210039;3.江南大學機械工程學院,江蘇無錫,214122)
0 引言
風送噴霧是當前果園施藥最常用的施藥技術。目前,果園風送噴霧中的氣流道形式主要有環向出風式、塔式、柔性管多頭式和獨立圓盤式等,這些風送裝置由果樹種植的特定模式而設計,機具的噴霧頭大都固定于機架上,風送噴霧裝置不能根據果樹的位置進行調節,造成沉積在葉片單位面積上的藥液極不均勻,導致局部過量噴施和防治效果不佳現象,嚴重影響果品品質。
噴霧距離是影響噴霧效果的重要技術參數之一,根據果樹冠層結構實時調節噴霧距離,實現對冠層的仿形噴霧是廣大學者研究的熱點課題。Osterman等[1]設計風送噴霧幾何位置在線調節裝置及其控制算法,該裝置顯著提高農藥有效利用率,降低農藥飄移。宋淑然等[2]設計果園柔性對靶噴霧樣機,測試了不同控制方式下的霧滴沉積率,結果顯示最高霧滴沉積率達到88.4%;周良富等[3]針對籬笆型果樹特點,設計一種仿形噴霧架,通過驅動電動絲桿實現霧化器的上下左右調節,試驗結果得出組合噴霧執行裝置完成升降、伸縮和旋轉的時間分別為51.3 s、50.5 s、26.5 s,但該裝置依然難以實現噴霧位置的在線調節。Zaman等[4]研制了雙臂式機械結構與單片機控制的仿形噴霧試驗樣機,可以適應不同噴霧對象;Tumbo等[5]采用自適應模糊控制算法,設計一種以單片機為核心的非接觸式仿形噴霧位置控制系統;李杰[6]研制仿形噴霧樣機,得出不同噴霧距離下霧滴的運動特性,霧滴除了在果樹底部分布較少,其余部位分布更均勻;李龍龍等[7]研發基于變風量與變噴霧量的果園自動仿形噴霧機,實時調整噴霧頭流量和送風速度實現仿形變量噴霧;房開拓[8-9]設計一種結構上能夠對果樹樹冠實現多自由度、立體式仿形機構,滿足不同種類果樹施藥需求。
以上研究初步實現了風送仿形噴霧,農藥有效利用率得到提高,為本研究提供理論基礎與試驗指導。但這些機具可調的空間位置都相對單一,無法根據果樹實際形貌調整噴霧頭位置和姿態,難以獲得最佳噴霧距離和噴霧方向。本文從如何提高噴霧機構柔性入手,研究果樹仿形施藥過程,重點考慮霧化器空間位姿調節功能,設計多自由度仿形多桿機構,以提高冠層霧滴沉積特性為目標,開展機構優化、理論分析與試驗驗證等研究,以期為噴霧機具研發與應用提供技術支撐。
1 仿形噴霧實施方案
1.1 機構性能設計
根據標準紡錘形果樹的幾何結構參數,確定仿形機構的調節范圍等工作特性,實現噴霧位置和噴霧方向的精準調節,具體要求的技術指標如表1。
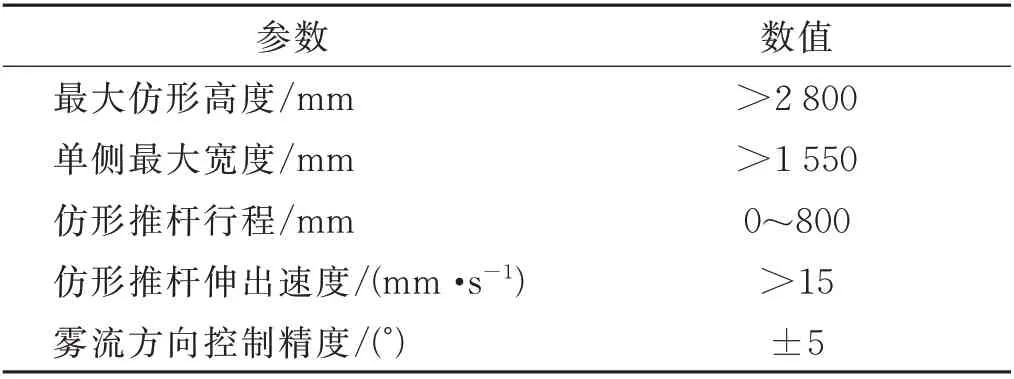
表1 主要技術指標Tab.1 Main technical specifications
1.2 仿形原理
仿形噴霧是根據果樹冠層結構形狀,實時調節噴霧頭的空間位置和姿態,使得霧流最大范圍流向樹冠,從而實現單次農藥噴施過程中冠層的全覆蓋。
單側噴霧仿形機構如圖1揚示,主要包括執行電機、絲桿螺母機構、仿形推桿機構、直線軸承、圓盤式霧化盤、連桿、底座和支承架。仿形架整體可通過電機驅動絲桿螺母機構實現大幅度橫向平移和垂直升降,通過控制各仿形推桿的伸長量來調整機構形狀及霧化盤位置。作業過程中,首先根據實際果樹冠幅尺寸,調節橫向和升降絲桿螺母機構,使得噴霧頭處于合適位置,再精確調整各仿形推桿伸縮量,保證理想噴霧距離。絲桿螺母平移機構結合多段仿形推桿可以實現大幅度、多角度調節各霧化盤空間位置,達到柔性仿形、精準噴施目的。
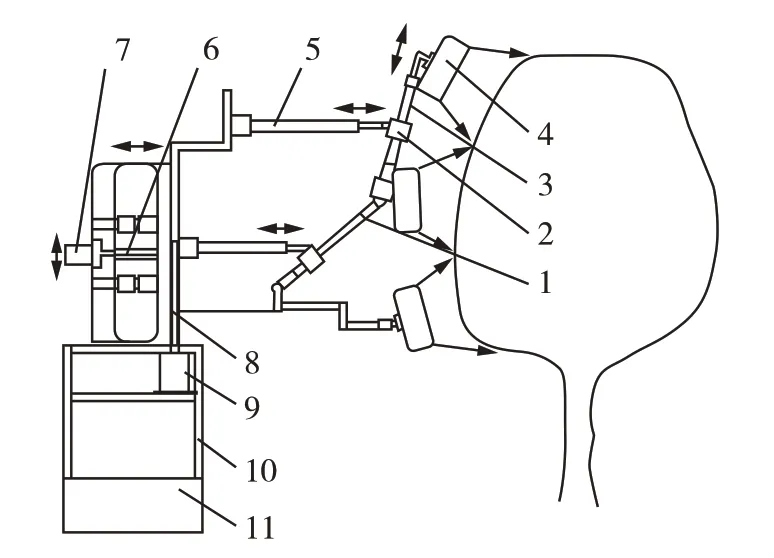
圖1 機構仿形示意圖Fig.1 Mechanism profiling diagram
2 機構設計
2.1 仿形機構總體設計
仿形機構是噴霧機實施作業的核心部件,應當綜合考慮樹冠仿形效果、系統剛性及工作穩定性。
機構總體設計如圖2揚示,總體結構為多自由度對稱式二級搖臂機構,并固定安裝于牽引式拖車上。
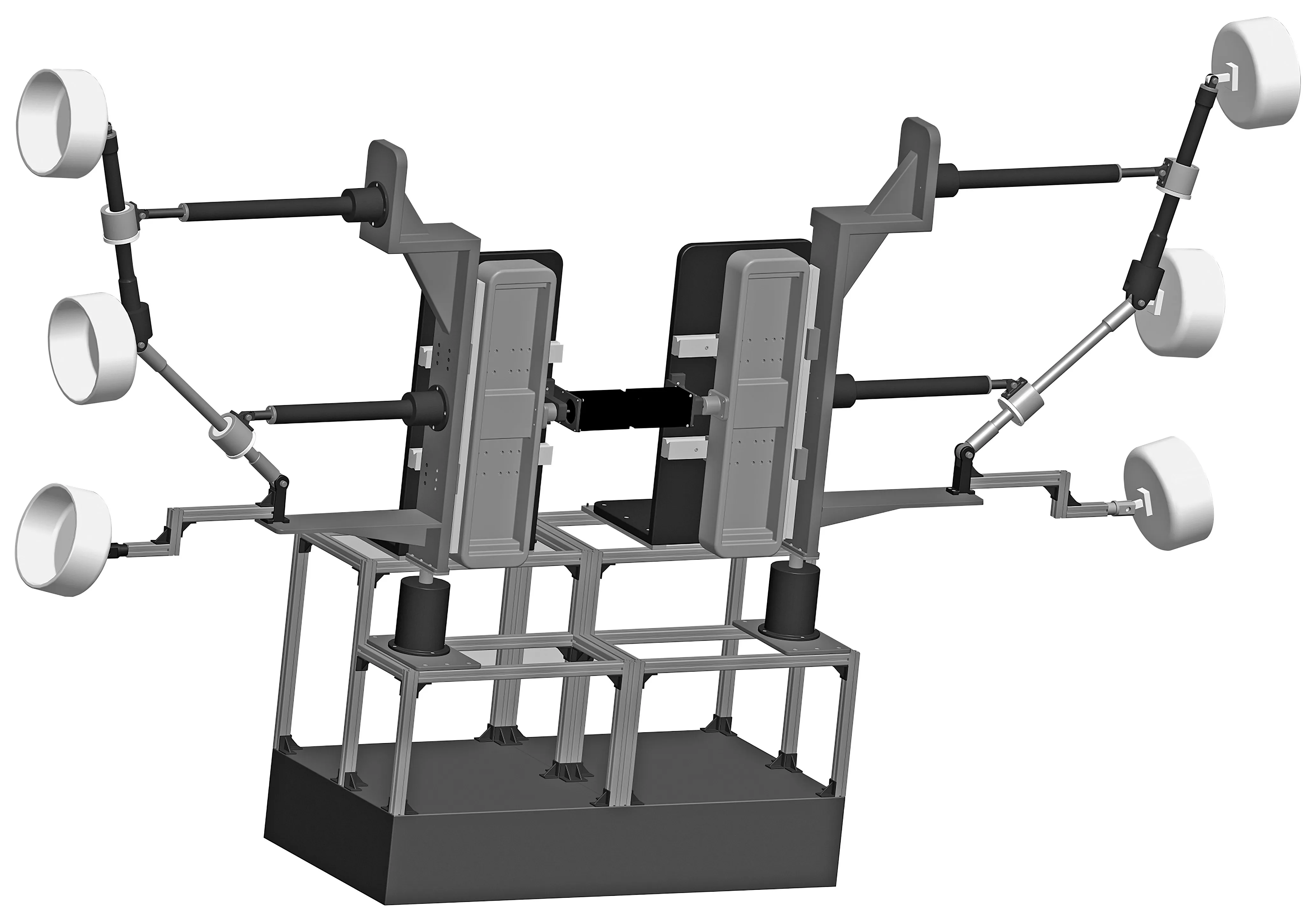
圖2 仿形機構樣機模型Fig.2 Prototype model of profiling mechanism
機構左右兩側結構上完全對稱,仿形機構單側具有多個自由度,將每側3個霧化盤安裝于機構關節處,通過驅動電機或者改變仿形推桿的伸長量以此調節霧化盤與樹冠之間的距離和角度,從而獲得最佳噴霧參數。
2.2 仿形作業的具體實施
如圖1揚示,水平安裝的絲桿螺母機構在步進電機驅動下,可以實現整個右側機構水平方向大幅度直線平移;豎直安裝的絲桿螺母機構在步進電機驅動下,可以實現整個右側機構上下大幅度升降;2個水平安裝的仿形推桿,伸長量的組合變化能夠調節圓盤式霧化器的位置和姿態;高位仿形推桿的伸縮變化可以調整頂部圓盤式霧化器的位置;直線軸承能夠在連桿和仿形推桿外壁滑動。機構左右兩側結構完全對稱,原理相同。
總之,通過驅動水平和豎直方向的電機組合,結合各個仿形推桿伸縮,即調節每個霧化盤空間位姿,實現仿形作業。
2.3 仿形推桿結構設計
仿形推桿是將電機的旋轉運動轉化為推桿直線往復運動的裝置,主要包括端部法蘭、推桿、推桿端蓋、直線軸承、軸承端蓋、軸承座、圓錐滾子軸承、平鍵蝸輪等,如圖3揚示。
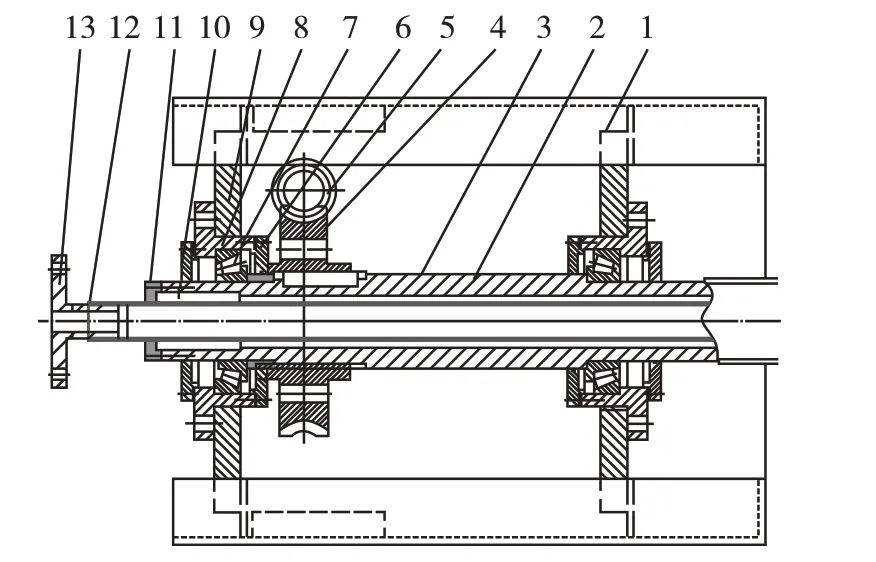
圖3 仿形推桿結構圖Fig.3 Structure diagram of profiling push rod
絲桿在步進電機驅動下同步轉動,同時螺母在導軌內往復直線運動。仿形推桿的最大行程為800 mm,機構最大的軸向推力為1 500 N,其最大的空載轉速為25 mm/s。
2.4 推桿機構調節設計
仿形推桿內步進電機與推桿同軸安裝,推桿端部與中空鋼管型材采用法蘭聯接,如圖4揚示。仿形機構通過仿形推桿的伸縮調節噴霧頭位置,推桿與連桿外壁之間的聯接要求穩定,推桿伸出端既需要轉動副又需要移動副。
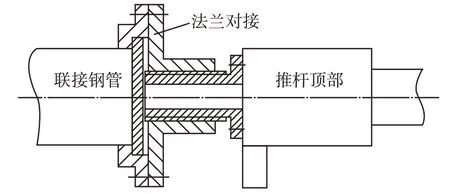
圖4 推桿與型材聯接Fig.4 Connection of push rod and section bar
為了減少摩擦力,使得推桿與連桿外壁能夠光滑移動,采用帶法蘭的直線軸承與套筒安裝的結構[10],如圖5揚示。
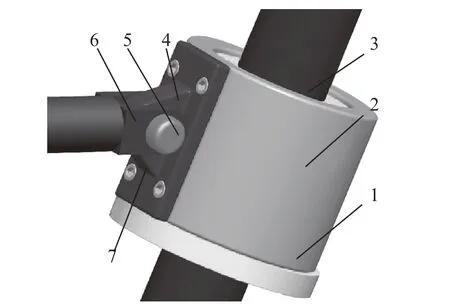
圖5 直線軸承聯接Fig.5 Connection of linear bearing
2.5 轉向機構設計
仿形機構的轉向裝置選用蝸輪蝸桿傳動機構來實現,如圖3揚示,其設計參數與選型應根據執行裝置的運行速度確定,旋轉角速度、平移速度與蝸輪蝸桿參數[11]如式(1)~式(4)。

式中:n1——蝸桿即步進電機轉速,r/min;
z1——蝸桿頭數;
z2——蝸輪齒數;
n2——絲桿轉速,r/min;
δ——絲桿螺距,m;
v2——平移速度,m/s;
d1——蝸桿分度圓直徑,m;
d2——蝸輪分度圓直徑,m;
m——模數,m=4;
q——直徑系數,q=10。
噴霧機構在停止工作時,旋轉裝置向內旋轉90°,完成該動作額定時間為15 s,即蝸輪轉速為1 r/min。為了實現自鎖功能,選取分度圓導程角為5°,蝸桿頭數z1=1,因此蝸輪齒數z2=40,蝸桿分度圓直徑d1=40 mm;蝸輪分度圓直徑d2=160 mm。
2.6 仿形推桿電機選型
電機的計算轉矩Teq取最大等效負載轉矩Teq1和快速啟動時空載轉矩Teq2二者中的較大值[12]。
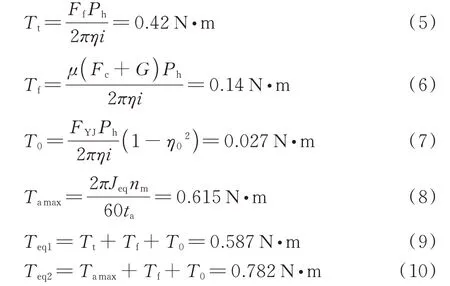
式中:Tt——最大工作負載轉矩,N·m;
Tf——電機軸摩擦轉矩,N·m;
T0——附加摩擦轉矩,N·m;
Ff——進給方向最大載荷,Ff=370 N;
Fc——垂直方向載荷,Fc=370 N;
G——運動部件的總重,G=300 N;
Ph——絲桿導程,Ph=5 mm;
FYJ——滾珠絲桿的預緊力,FYJ=123 N;
μ——導軌的摩擦因數,μ=0.18;
i——傳動比,i=1;
η——傳動鏈總效率,η=0.7;
η0——絲杠未預緊傳動效率,η0=0.9;
Jeq——總轉動慣量,Jeq=0.098 kg·cm2;
nm——步進電機轉速,nm=60 r/min;
ta——步進電機加速揚用時間,ta=1 s;
Tamax——最大加速轉矩,N·m。
揚以計算轉矩Teq為0.782 N·m,取安全系數K為2.5,KTeq為1.7。該系統選用兩相步進電機,型號為90BF003。機構的推桿電機供電電壓為24 V,工作電流為5 A,工作時最大靜轉矩為1.96 N·m,其轉動慣量為0.6 kg·cm2。
3 仿形機構運動學分析
3.1 機構數學模型
為了研究柔性仿形噴霧機構運動模型,優化噴霧點的運動學和動力學特性,從而獲得最佳的作業區域,將柔性仿形機構抽象為計算模型[13],具體模型如圖6揚示。
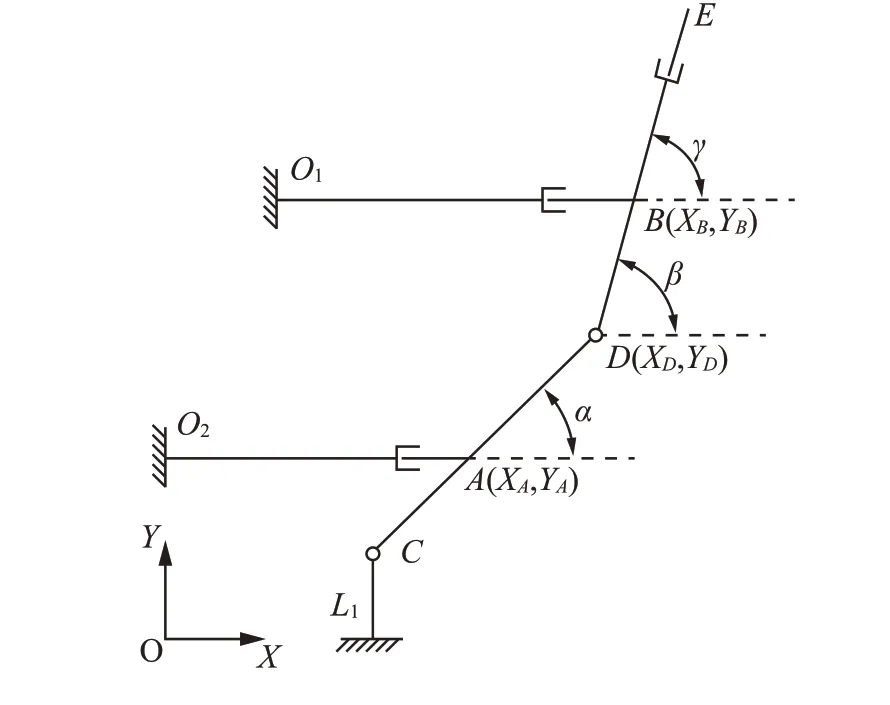
圖6 機構數學模型Fig.6 Mathematical model of mechanism
3.2 噴霧點運動學方程
圖7為連桿機構關節坐標系模型,其單側3個霧化器(噴霧點)安裝位置分別為點C、點D、點E,同時,建立坐標系和各個點的坐標位置,其中,坐標系中數值單位為mm。
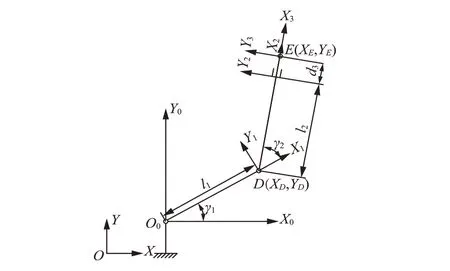
圖7 連桿機構關節坐標系Fig.7 Joint coordinate system of linkage mechanism
其中O0(650,250),連桿的長度ai、連桿扭角αi、關節變量角θi和偏置量di,關節連桿變換參數如表2揚示[14]。
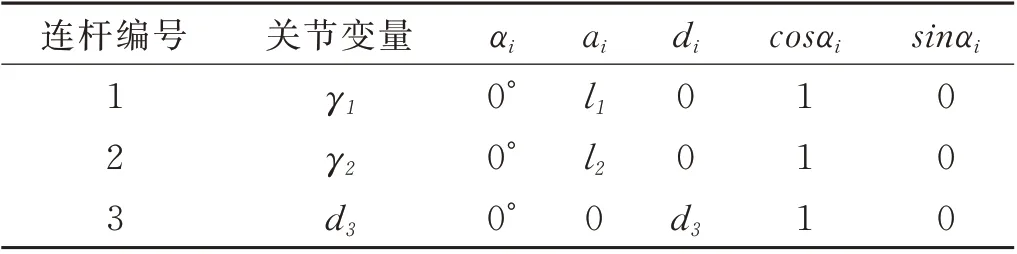
表2 連桿變換參數Tab.2 Parameters of connecting rod transformation
坐標系{i}到{i-1}的變換矩陣

將表2變換參數帶入式(11),得
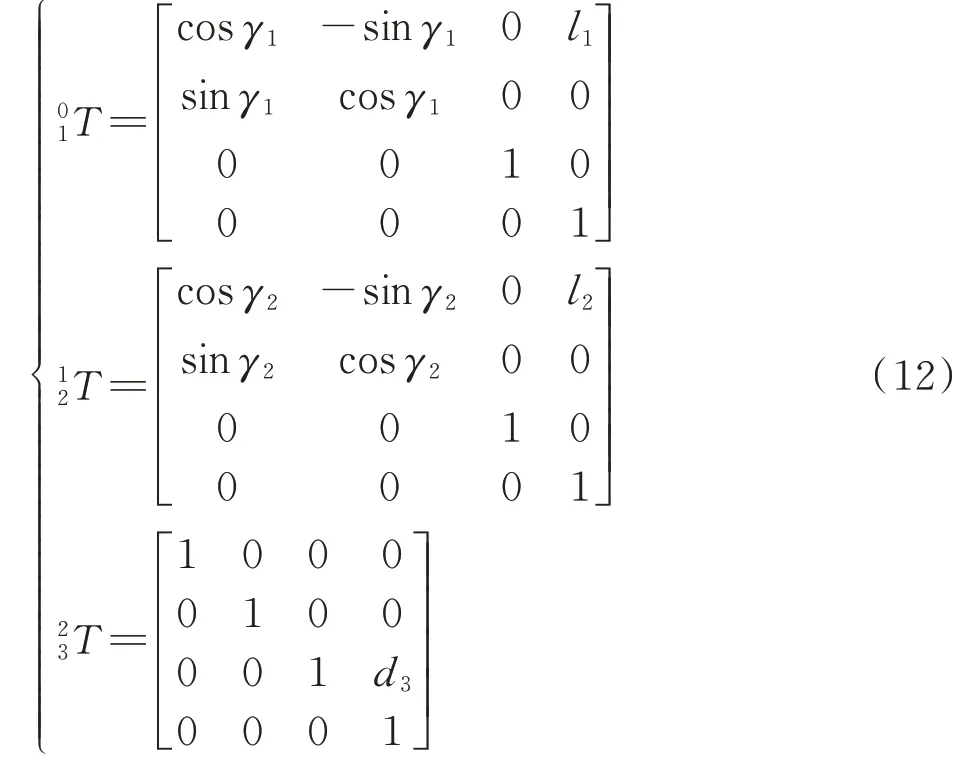
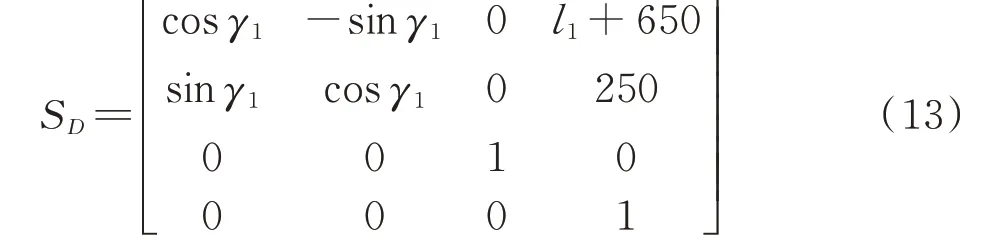
D點的運動學方程為:SD=,即
噴霧點E的運動學方程
SE=,即

其中,d3為仿形推桿DE的伸長量,0 mm≤d3≤800 mm,32.3°≤γ1≤69.8°,10.9°≤γ2≤49.3°。
3.3 仿形機構參數優化
仿形機構參數優化的目標是在現有的約束條件下,調整兩個水平放置的仿形推桿初始安裝位置,使得噴霧點D、E具有較大的工作空間[15-16],因此需綜合考慮工作空間和受力,尋求圖6中O1(XO1、YO1)的最佳安裝位置YO1的值。
在ADAMS中采用關鍵點參數化的方法構建機構模型和目標函數[17],以此進行O1點的位置優化。在保證機構能夠實現整周轉動前提下,測得YO1的范圍為225 mm≤YO1≤275 mm。設YO1的初始值為225 mm,最大值為275 mm,進行間距為5 mm的仿真試驗,其數值如表3揚示。其中,DisXmax、DisXmin分別為E點橫坐標的最大值、最小值,DisYmax、DisYmin、分別為E點縱坐標的最大值、最小值,ΔDis_X、ΔDis_Y分別為E點水平、豎直方向行程,單位為mm。FMmax、FMmin為D點受合外力的最大值、最小值,單位為N。
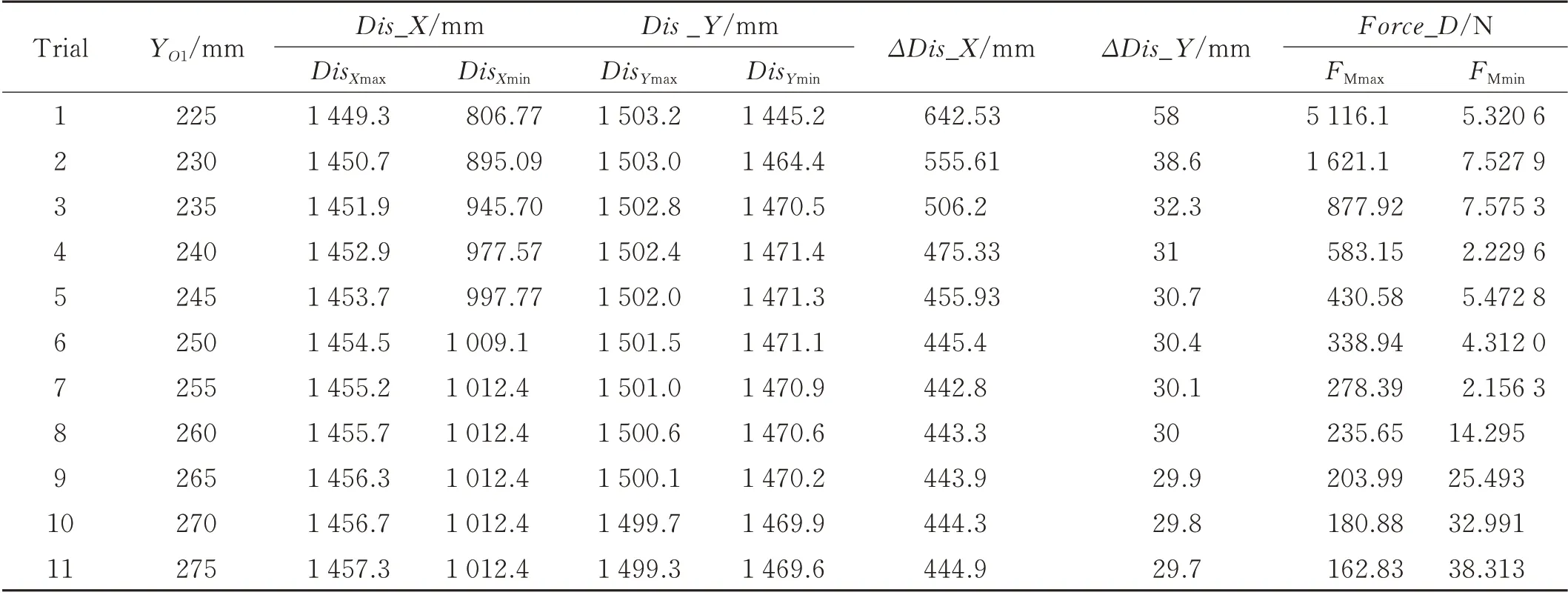
表3 推桿O1B的位置對點E位移及點D處受力影響Tab.3 Influence of the push rod O1B position on the displacement at point E and the force at point D
研究表3可以發現,隨著YO1取值增加,點D的受力大大減小,YO1取值為245 mm時,Force_D迅速突變為430.58 N,YO1繼續增加后一直處于平穩數值,Force_D緩慢變化。為了盡量增加工作范圍,選擇YO1的數值為250 mm作為仿形推桿的豎直安裝位置。噴霧點E的最大水平坐標為1 454.5 mm,最大豎直坐標為1 501.5 mm,橫向和縱向調節量分別為445.4 mm和30.4 mm,點D受到最大力為338.94 N。橫向和縱向可調節最大值分別為695.4 mm、680.4 mm,噴霧機單側最大作業高度和寬度分別為2 951.5 mm、1 704.5 mm(水平250 mm和豎直650 mm疊加后),如表4揚示。可以看出,調節范圍可以滿足前文揚述設計要求,且機構受力平穩,工作可靠。
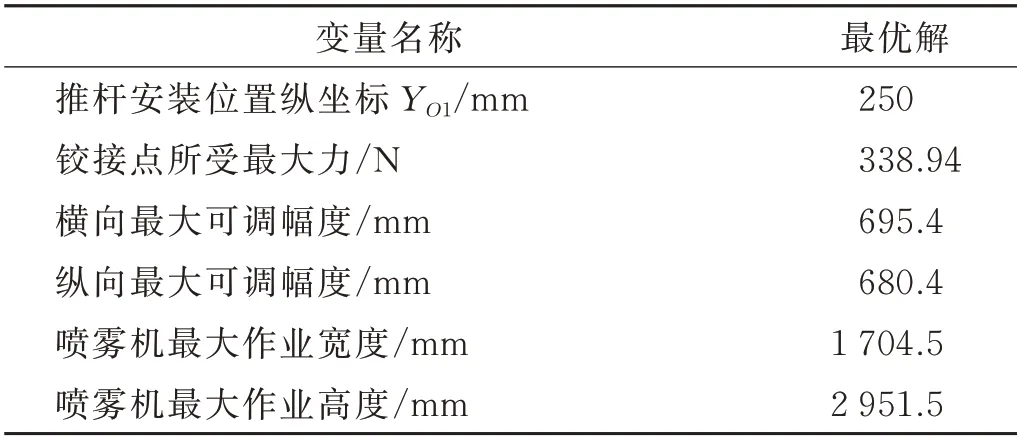
表4 優化后變量最優解Tab.4 Optimal value of variables after optimization
4 性能試驗分析
為了分析仿形機構噴霧效果,現場測試了樣機的性能參數[18],包括各關節的工作行程、響應時間等,并進行冠層覆蓋率試驗。
4.1 機構響應特性測試
仿形機構整體平移幅度、速度和穩定性等是衡量噴霧機重要參數,而各個關節伸縮運動性能則是能否實現仿形的關鍵[19]。
試驗過程中,分別測量整體仿形架橫向、縱向平移至最大位移處的時間,再測得各關節仿形推桿完全展開的時間,反復3次,取平均值如表5揚示。執行過程中,機構運行平穩,無明顯振動或電機堵轉,滿足預計仿形功能。
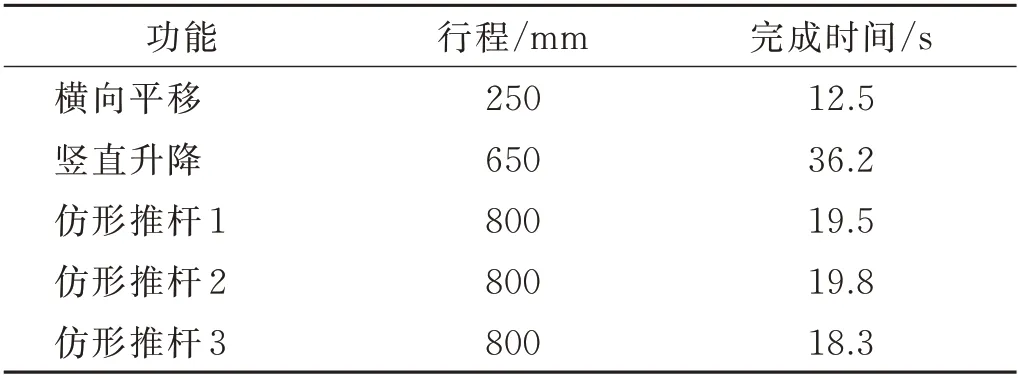
表5 運動性能參數Tab.5 Kinematic performance parameters
4.2 仿形噴霧沉積效果測試
4.2.1 試驗條件
為了驗證仿形噴霧效果,比較固定噴霧和仿形噴霧作業效果(圖8),對比試驗于浙江省臺州試驗示范基地進行,試驗過程中環境溫度14℃~21℃,空氣濕度為66%,陣風速度0.8~2 m/s。試驗對象為兩排直線排布的印度茉莉,樹高平均2.2 m,行距4 m,株距2 m,葉面積平均32 cm2。
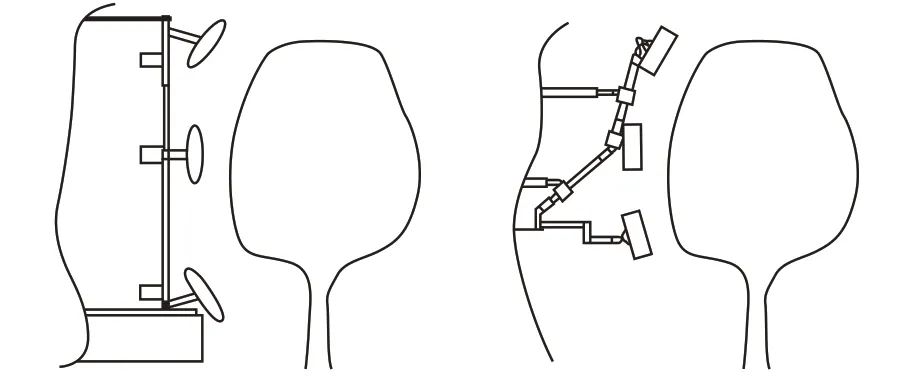
圖8 固定位置噴霧與仿形噴霧Fig.8 Fixed position spray and profiling spray
噴霧機由東風500拖機牽引,以0.82 m/s勻速行駛,風機轉速1 340 r/min,噴霧壓力0.5 MPa,每個霧化器裝有8個噴霧頭,每側3個霧化器,計24個噴霧頭進行現場試驗。
4.2.2 試驗方法
選定位于每行中間的2棵樹作為霧滴采樣對象,設定如圖9揚示的采樣點,各點高度距離地面分別為0.5 m、0.85 m、1.2 m、1.5 m和1.8 m,左右分居樹干兩側0.3 m。采樣點正反面固定水敏試紙,試驗結束后,將水敏試紙風干編號,測得覆蓋率(3次平均值)。
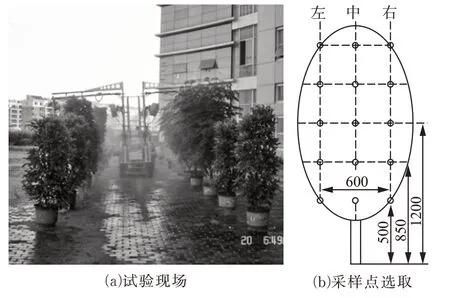
圖9 試驗方法及過程Fig.9 Test method and process
4.2.3 試驗結果
采用Depositscan軟件讀取水敏試紙中霧滴覆蓋率。樹冠分割為5行3列共15個測量點,每個點正反面分別測量,開展固定噴霧與仿形噴霧對比試驗,結果如表6。覆蓋率平均值從左向右呈減小趨勢,縱向自下而上呈上升趨勢;固定噴霧整體霧滴覆蓋率平均值為29.97%,變異系數平均值為39.05%,而仿形噴霧覆蓋率平均值為43.85%,變異系數平均值為26.63%,表明相同工況下,仿形噴霧的霧滴覆蓋率高于固定位置噴霧,霧滴分布更為均勻有效。
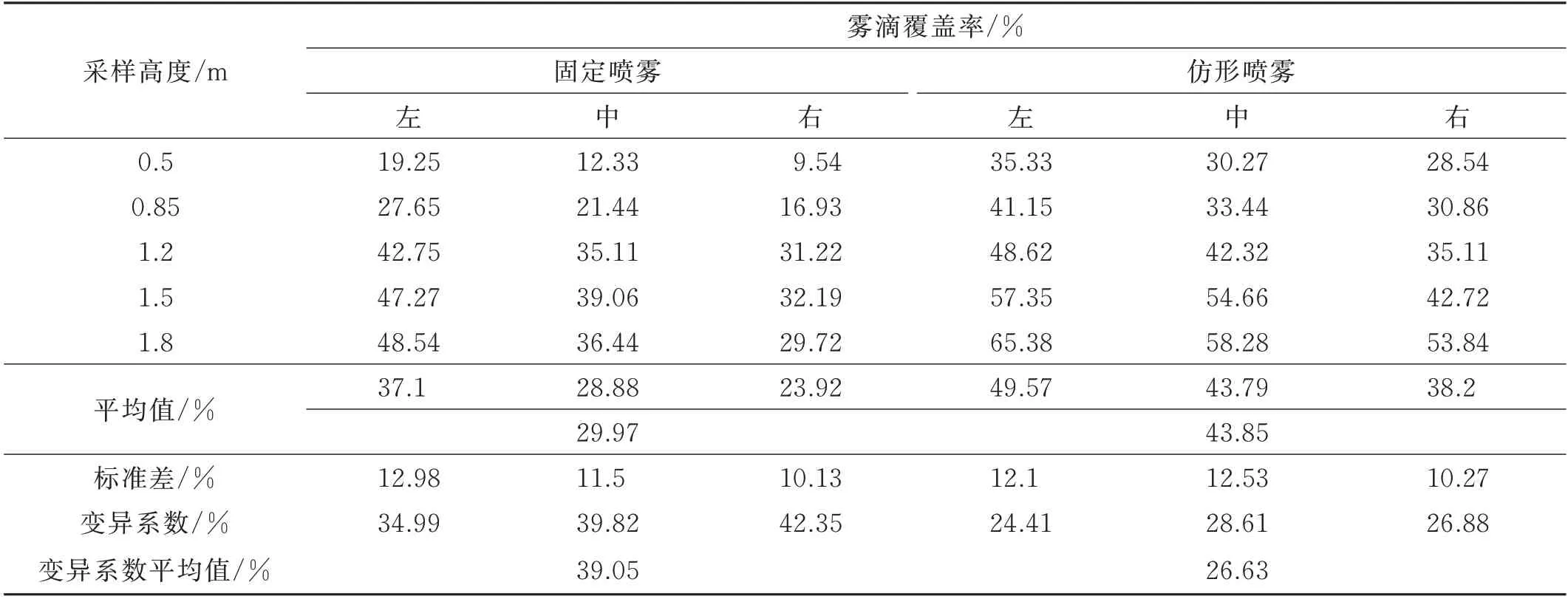
表6 固定噴霧與仿形噴霧冠層霧滴覆蓋率Tab.6 Spray coverage of fixed spray and profiling spray
5 結論
揚設計的柔性仿形噴霧機構,通過理論分析、運動學仿真和試驗,得到主要結論如下。
1)基于果園施藥仿形低量噴霧思想,設計一種三自由度對稱式兩級搖臂施藥機構,構建其數學模型,優化結構參數,并推導出各噴霧點運動學方程。通過運動仿真和現場試驗驗證,柔性仿形機構可以滿足仿形噴霧的技術要求。其單側最大仿形高度和寬度分別為2 951.5 mm、1 704.5 mm,橫向和縱向可調節最大值分別為695.4 mm、680.4 mm,運行過程中鉸接點處受力最大為338.94 N。
2)機構的響應特性結果顯示,柔性仿形機構運行穩定,水平伸縮全程時間為12.5 s,升降全程時間為36.2 s,單一推桿全程平均時間約19.2 s。
3)噴霧沉積特性試驗結果表明,仿形噴霧覆蓋率達43.85%,變異系數平均26.63%,優于固定噴霧整體霧滴覆蓋率平均值為29.97%,變異系數平均39.05%。