過程控制系統中的雙容水箱液位恒值控制研究
2022-04-11 07:46:51石博軒王俊偉婁凌浩
科技風 2022年10期
石博軒 王俊偉 婁凌浩


摘?要:過程控制實驗系統在高校和科研中應用比較廣泛,雙容水箱液位控制系統具有單輸入、單輸出、非線性、時變和滯后性的特征,本文以天煌教儀THJDS3型過程控制實驗平臺中的雙容水箱液位作為被控制對象,通過該系統建立雙容水箱液位的傳遞函數數學模型,設計了PID控制器,并用MATLAB對上述控制系統進行了仿真研究,對實驗結果進行了分析。
關鍵詞:過程控制;雙容水箱液位控制;數學模型;非線性;PID控制器
Research?on?Constant?Liquid?Level?Control?Algorithm
of?Double?Tank?in?Process?Control?System
Shi?Boxuan?Wang?Junwei*?Lou?Linghao
Hetao?University,College?of?Mechanical?and?Electrical?Engineering?Inner?MongoliaBayannur?015000
Abstract:The?process?control?experimental?system?is?widely?used?in?Colleges?and?universities?and?scientific?research.The?double?tank?liquid?level?control?system?has?the?characteristics?of?single?input,single?output,nonlinearity,timevarying?and?hysteresis.This?paper?takes?the?double?tank?liquid?level?in?the?thjds3?process?control?experimental platform?of?Tianhuang?teaching?instrument?as?the?controlled?object,and?establishes?the?transfer?function?mathematical?model?of?the?double?tank?liquid?level?through?the?system,The?PID?controller?is?designed,the?above?control?system?is?simulated?with?MATLAB,and?the?experimental?results?are?analyzed.
Keywords:Process?control;Liquid?level?control?of?double?tank;Mathematical?model;Nonlinearity;PID?controller
1?概述
雙容水箱液位控制系統在化工、電力和高等學校教學和科研中應用比較廣泛,尤其是液位的恒值控制。通過在高校過程控制實驗平臺上模擬液位的控制為工業中的實際應用和培養學生工程實踐能力奠定基礎。
雙容水箱液位恒值控制具有單輸入、單輸出、非線性、時變性和滯后性等特點[1],被控對象雙容水箱由上下兩個水箱組成,被控對象雙容水箱的控制輸入為液體流量,輸出量為液位,控制的難點是實現液位精確和快速控制。針對以上控制要求,孫明格等[2]開發了LabVIEW的雙容水箱液位控制系統,具有一定的應用價值。孫悅等[3]通過比較方法,設計了PID控制、模糊控制和模糊PID控制的液位控制,通過比較得到模糊PID控制的最佳控制性能。李磊等[4]設計了量子群優化算法的PID雙容水箱液位控制系統,控制性能優于傳統PID控制器。李大字等[5]設計了雙容水箱液位自抗擾控制系統(ADRC),并與傳統PID控制進行了對比實驗,ADRC調節時間短和調節速度快,但超調量較大。李輝等[6]將具有相軌跡云模型的控制器應用到三容水箱液位控制系統中,具有一定的創新性。Meng?X等[7]針對四容水箱非線性和耦合性,提出了一種非線性擾動觀測器(NDOB)來估計擾動并用于補償控制,并與純PID控制進行了對比實驗,結果表明NDOB具有更好的控制性能。
本文是詳細介紹了被控對象雙容水箱的數學模型中的傳遞函數建立過程,并設計了傳統的PID控制器實現了液位的恒值跟蹤控制。
2?過程控制實驗裝置介紹
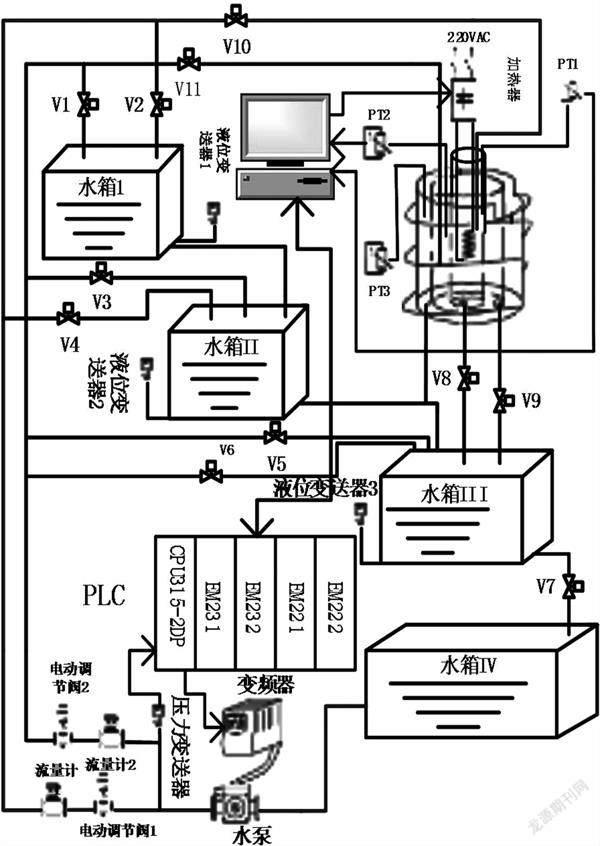
過程控制實驗裝置采用天煌教儀THJDS3型過程控制實驗平臺。實驗裝置如下圖1所示。加熱筒分為三層:內筒最高,通過V10手動調節閥門可以向內筒注水;中間筒低于內筒,通過V11可以向中間筒注水;外層筒環抱中間筒,其作用是當中間筒注水溢出的時候,可以將水再收集并回流到下面的大水箱中;壓力變送器將水的壓力(0~0.1MPa)轉換為4~20mA的電流信號送給PLC;PLC作為PID運算控制器可以輸出4~20mA電流信號,作為變頻器輸入信號,變頻器的頻率輸出對應0~50Hz,不同的頻率對應不同的水泵轉速,從而實現電機變頻調速和改變抽水的速度。壓力變送器、水泵和PLC控制器構成閉環控制使水管內的壓力值穩定在某一設定值,以實現變頻恒壓供水。
電動調節閥的輸入信號是4~20mA,輸出開度是0~100%,輸入的電流信號不同,則調節閥的開度也不同,從而可以調節注水速度、壓力和流量;內筒裝有電阻加熱器,加熱器電壓0~220V對應控制電流4~20mA。改變輸入控制電流,可以調節加熱器的加熱電壓,從而改變加熱的速度。內筒加熱可以同時升高內筒和中間筒的溫度,同樣改變中間筒注水的速度,也能同時降低內筒和中間筒的溫度。本文控制的目的就是控制內筒的加熱速度和中間筒的注水速度,使內筒和中間筒的溫度分別穩定在不同的溫度。設計水箱Ⅰ、水箱Ⅱ、水箱Ⅲ的目的是可以做雙容水箱液位控制實驗。
3?雙容水箱模型
雙容水箱結構圖如圖2所示,包括氣動調節閥、電磁流量計、磁翻板液位計、壓力變送器、上下水箱、電磁閥和抽水泵等。
其中R1、R2、R3表示管道液阻,q1、q2、q3表示流量,H1和H2表示液位高度。
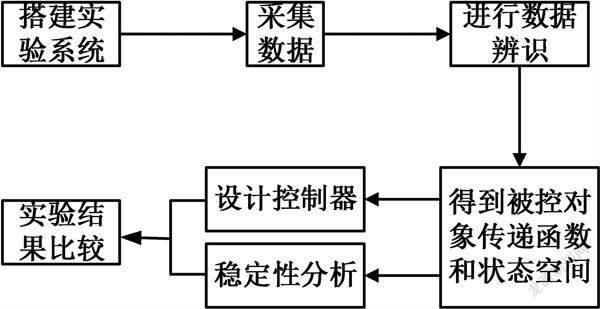
下面對雙容水箱模型的傳遞函數進行建模,實驗建模的流程圖,如圖3所示。實驗重點是被控制對象數學模型建立、控制器的設計和控制算法的選擇。
根據圖2的雙容水箱模型,根據物料平衡方程,可得如下微分方程:
q1-q2=AdH1dt(1)
q2-q3=AdH2dt(2)
其中A為兩個雙容水箱的底面積,對(1)和(2)式求拉氏變換得:
Q1(S)-Q2(S)=ASH1(S)(3)
Q2(S)-Q3(S)=ASH1(S)(4)
根據閥門液阻與液位高度關系,可得如下關系式:
Q2(S)=H1(S)R2(5)
Q3(S)=H2(S)R3(6)
分別聯立(3)和(5)式,(4)和(6)式得到如下傳遞函數:
Q2(S)Q1(S)=1AR2S+1(7)
Q3(S)Q2(S)=1AR3S+1(8)
下面以Q1(S)為輸入量,H2(S)為輸出量,結合(6)、(7)、(8)式得到雙容水箱的所對應的數學模型傳遞函數如下:
G(S)=H2(S)Q1(S)
=Q2(S)Q1(S)H2(S)Q3(S)Q3(S)Q2(S)
=1AR2S+11AR3S+1R3
=R3(AR2S+1)(AR3S+1)
考慮到雙容水箱的滯后性,令T1=AR2,T2=AR3,K=R3,得到最終傳遞函數:
G(S)=K(T1S+1)(T2S+1)e-τS(9)
在圖1的基礎上,打開閥門V4和V7,使水箱Ⅱ和水箱Ⅲ構成雙容水箱系統,Ⅳ水箱作為儲水箱。其中V4全開,V7達到適當開度。在手動狀態下,打開水泵,使氣動調節閥1開度分別在10%、30%和60%三種情況下,每隔10s記錄一次水箱Ⅲ液位數據和水箱Ⅱ輸入流量數據,直到液位分別達到相應的平衡為止停止記錄數據,共測量100組數據。
利用測量的100組數據,將數據導入MATLAB?2018b/System?Identification工具箱中,對采集到的水箱液位高度數據進行模型辨識,最終得到的傳遞函數模型為:
H2(S)Q1(S)=5.8(122.1S+1)(132.2S+1)e-48.5s(10)
4?控制系統設計和仿真
根據建立的雙容水箱數學模型,設計了如圖4所示的控制系統,其中雙容水箱液位模型如式(10)所示。
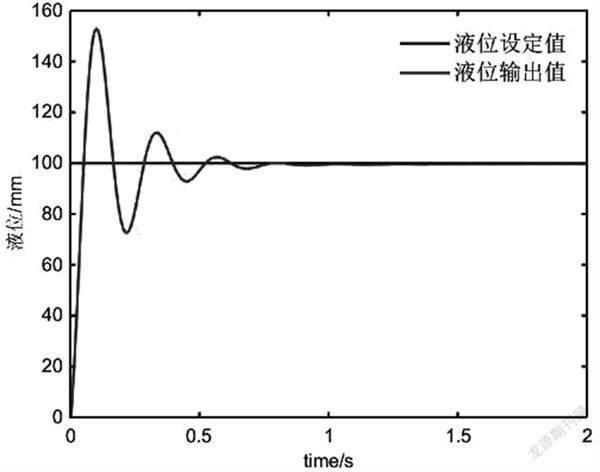
上述控制器中的PID三個參數分別設置為kp=150,ki=0.132,kd=2400,采用的PID算法是增量式PID算法,增量式PID算法如式(11)所示,其中u(k)為控制律,e(k)為液位偏差,液位設定值為100mm。
Δuk=u(k)-u(k-1)
=kpe(k)-e(k-1)+kie(k)+
kde(k)-2e(k-1)+e(k-2)(11)
控制系統的MATLAB仿真圖,如圖5所示。
結語
通過建立雙容水箱的數學模型,并應用PID控制進行了液位的恒值控制,控制性能較好,為后續智能控制算法的改進奠定基礎。
參考文獻:
[1]周依濤,鄭煒煬,項思哲,高金鳳.基于滑模控制的雙容水箱液位系統設計[J].國外電子測量技術,2021,40(06):5458.
[2]孫明革,張嘉誠.基于LabVIEW的雙容水箱液位控制系統研究[J].科學技術創新,2021(17):184185.
[3]孫悅,恒慶海.基于DCS的雙容水箱液位控制系統仿真[J].計算機仿真,2020,37(12):219223.
[4]李磊,李俊紅,顧菊平,華亮.雙容水箱基于QPSO算法的PID控制研究[J].控制工程,2021,28(08):15531558.
[5]李大字,李國強,張建青.雙容水箱液位自抗擾控制系統穩定性分析及實驗教學設計[J].實驗技術與管理,2021,38(07):6366+72.
[6]李暉,邢振登.一種基于相軌跡特征的云模型控制器設計[J].控制工程,2020(9):14891494.
[7]Meng?X,Yu?H,Zhang?J,et?al.DisDisturbance?observerbased?feedback?linearization?control?for?a?quadrupletank?liquid?level?system[J].ISA?Transactions,2021.
項目:內蒙古自治區國家級大學生創新創業訓練計劃項目(項目編號:202011631004)
*通訊作者:王俊偉(1985—?),男,內蒙古包頭人,碩士,講師,主要從事非線性控制、最優控制等方面的教學與科研工作。