基于單脈沖三維成像的抗交叉眼干擾方法
2022-04-07 12:31:22胡艷芳陳伯孝吳傳章
系統工程與電子技術 2022年4期
胡艷芳, 陳伯孝, 吳傳章
(西安電子科技大學雷達信號處理國家重點實驗室, 陜西 西安 710071)
0 引 言
在單脈沖雷達廣泛應用于軍事領域,尤其是精確制導領域時,干擾單脈沖雷達一度成為電子戰的研究熱點。交叉眼干擾是目前為止對抗單脈沖雷達最有效的方式。它是一種通過發射兩路幅度比趨近于1,相位接近180°的信號來對抗單脈沖雷達的主瓣相干干擾,使得單脈沖雷達形成嚴重的相位波前畸變,從而測得錯誤的目標角度信息。交叉眼干擾識別和對抗一直是國內外學者的研究熱點之一。
現有文獻主要討論了交叉眼干擾的干擾原理及干擾性能分析,伴隨著理論研究的深入與硬件技術的發展,交叉眼干擾技術開始逐步應用到不同裝備平臺。在交叉眼干擾的識別對抗方面,目前的公開文獻較少,且主要是利用極化信息進行識別研究。文獻[25-26]通過分析目標回波信號與相干干擾信號在主極化、交叉極化分量中的強度對比,對相干兩點源進行識別。文獻[27]利用變極化發射來調制目標回波的極化分布,并結合極化空間譜特征,可實現在多個主瓣干擾中識別目標。然而,在交叉眼干擾的對抗方面,目前仍缺少較為有效的方法。
基于上述問題,本文提出一種基于單脈沖三維成像的抗交叉眼干擾方法。單脈沖三維成像方法通過利用高分辨的一維距離像和單脈沖測角技術可以得到目標各散射點的空間位置,即目標的三維像。在交叉眼干擾的幅相特性、干信比等干擾參數發生變化時,雷達方仍可以通過三維像對干擾進行識別,并利用真實目標的團聚效應剔除由交叉眼干擾引起的目標尺寸之外的奇異點,從而有效地實施對抗。
1 交叉眼干擾機理
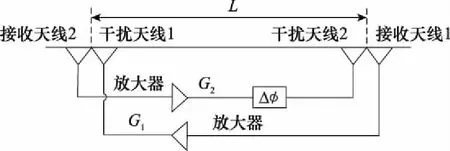
圖1 交叉眼干擾機結構模型Fig.1 Structure model of cross-eye jammer
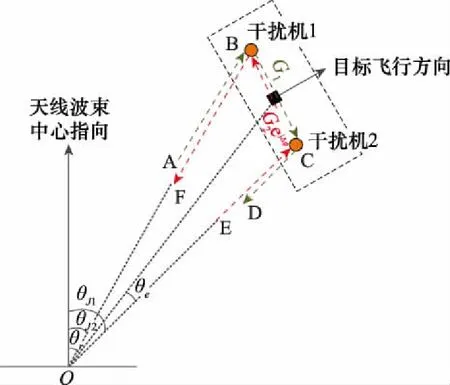
圖2 交叉眼干擾信號傳輸路徑示意圖Fig.2 Schematic diagram of cross-eye jamming signal transmission path
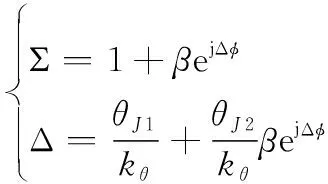
假設兩干擾天線與雷達天線波束中心指向的夾角分別為1和2,為干擾源相對于目標中心的半張角,為目標與波束中心指向的夾角(即目標角度),為單脈沖鑒角曲線的斜率。在理想情況下,若不考慮雷達信號幅度的衰減,也不考慮目標回波,則單脈沖雷達接收兩干擾源的和、差通道信號為
(1)
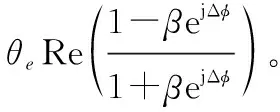
由于1,2=±,可計算比幅單脈沖指示角

(2)
式中:為鑒角曲線的斜率;Re(·)表示取實部。

(3)
由式(3)可知,當幅度比→1,相位差Δ→180°時,交叉眼增益趨于無窮大,將會對單脈沖雷達產生極大的角度誘偏,達到非常理想的干擾效果。
2 基于ISAR技術的回波信號模型
2.1 ISAR距離-多普勒成像原理
為使得單脈沖雷達在距離維和多普勒維同時形成高分辨并分開目標各散射點,本文引入逆合成孔徑雷達(inverse synthetic aperture radar,ISAR)技術。為方便說明,僅對二維平面的轉臺成像原理進行分析。目標相對于雷達的徑向速度為。設目標圍繞目標轉動中心以角速度轉動,旋轉平面為-平面,雷達到中心的初始距離為。設在= 0時刻目標上有點(,),為目標與軸(即距離向)的初始夾角。在時刻,點旋轉了角度,此時散射點與軸的夾角為()=+。雷達成像的示意圖如圖3所示。
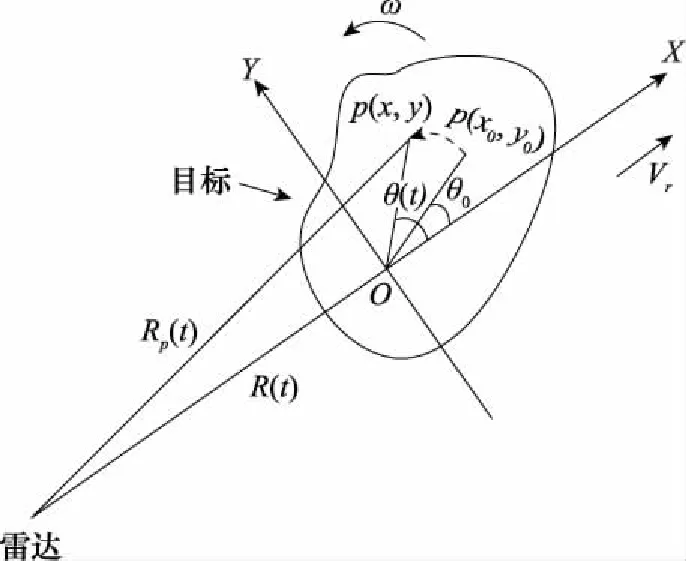
圖3 雷達成像幾何平面Fig.3 Geometric plane of radar imaging
在時刻,點的坐標值(,)為
(4)
在時刻,點與雷達之間的距離為

(5)
在遠場條件下,式(5)可近似為
()≈++cos()-sin()
(6)
目標的多普勒頻移為

(7)
式中:為波長。
可見,多普勒頻率由兩部分組成,其中,為目標平動引起的多普勒頻移,為目標的轉動引起的頻移。在實際ISAR成像中,目標相對于雷達的運動可分為兩部分:第一部分是目標沿雷達視線方向的平動;第二部分是目標相對于轉動中心的旋轉運動。其中,第一部分的平動會使得目標距離像出現距離走動,因此必須對平動分量進行補償。第二部分中雷達與目標之間存在方位角的變化,使得可以分辨方位向的散射點。
2.2 多散射點目標信號模型
交叉眼干擾信號傳輸路徑示意圖(三維)如圖4所示。假設真實目標有個散射點,散射點均位于主瓣內,雷達一個相干處理時間內發射個脈沖。目標相對于雷達的徑向速度為。設單脈沖雷達天線和方向圖為(,),方位差方向圖為Δ(,),俯仰差方向圖為Δ(,)。雷達發射信號為,雷達天線增益為,波長為,雷達發射功率為,(=1,2,…,)為第個目標散射點的目標反射截面積。兩干擾增益分別為和。為雷達發射第個脈沖時第個目標散射點與雷達的距離,=1,2,…,,=1,2,…,,目標散射點與單脈沖雷達天線波束中心的方位維和俯仰維夾角分別是、。兩干擾機與雷達的距離分別為1和2。兩干擾分別置于機翼兩側,且相距為。兩干擾機與天線波束中心的方位維和俯仰維夾角分別為1、2和1、2。
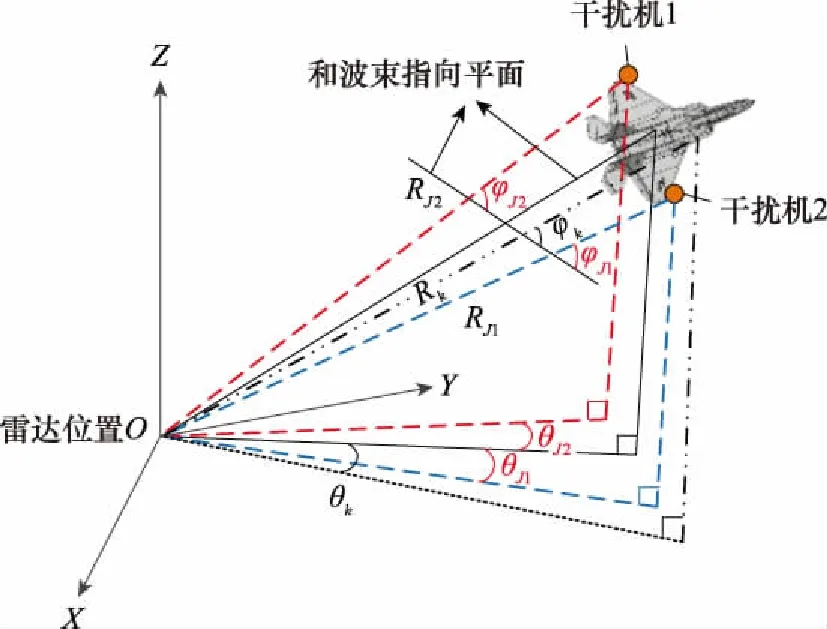
圖4 交叉眼干擾信號傳輸路徑示意圖(三維)Fig.4 Schematic diagram of cross-eye jamming signal transmission path (3-D)
為清楚地分析信號的衰減過程,先考慮接收的第個脈沖僅含干擾的回波信號,假設單脈沖雷達與交叉眼干擾設備的收發天線均為全向天線。
由圖4中的傳輸路徑可知,第個脈沖僅含干擾的和、方位差、俯仰差信號:
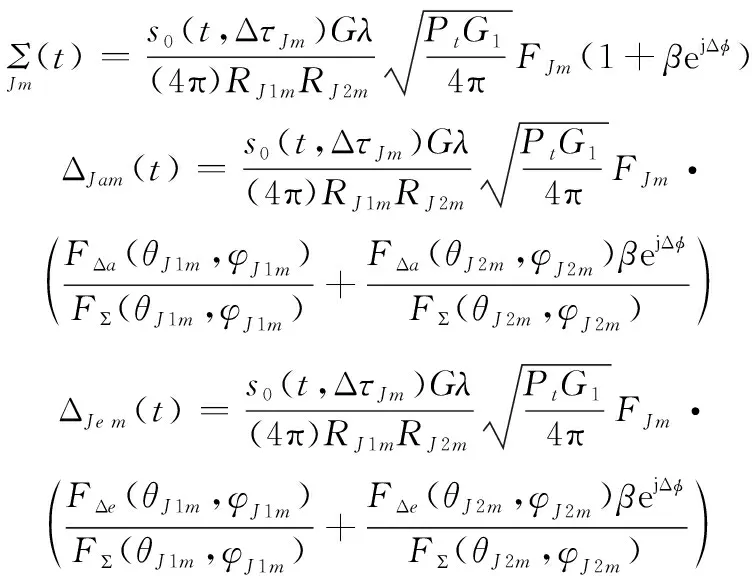
(8)
式中:
=(1,1)(2,2)
(9)
Δ=(1+2+)c
Δ為第個脈沖的干擾回路的時延,為脈沖重復周期,1、1與2、2分別為兩個干擾機在轉臺上的坐標。
第個脈沖的和、方位差、俯仰差通道總回波信號為

(10)
式中:()、()、()分別為第個脈沖僅含干擾的和、方位差、俯仰差信號;()、()、()為第個目標散射點的第個脈沖的和、方位差、俯仰差信號,可分別表示為
(11)
其中,Δ= 2c為第個目標散射點的第個脈沖的時延。
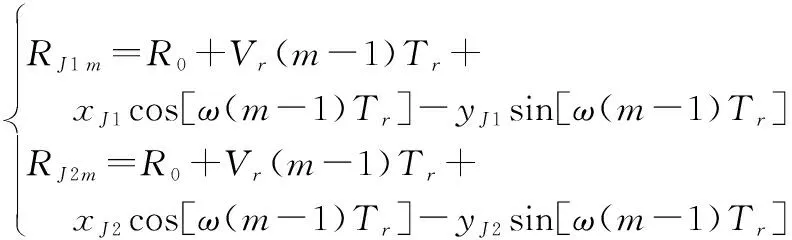
由式(11)可知:
=+(-1)+cos[(-1)]-sin[(-1)]
(12)
式中:為初始時刻轉臺中心與雷達的距離;、為目標散射點在轉臺上的坐標值。
3 單脈沖三維成像對抗交叉眼干擾的方法
單脈沖三維成像對抗交叉眼干擾方法流程圖如圖5所示。單脈沖雷達接收到和、方位差、俯仰差3個通道信號后,結合ISAR技術并運動補償,在距離維和多普勒維同時對目標進行高分辨處理,此時各散射點得以分辨。然后對各散射點進行單脈沖測角,可得到各散射點的方位角和俯仰角。一般目標與雷達的距離是可測的,結合測得的方位角和俯仰角,可得到單脈沖三維成像的關鍵信息,即方位面相對距離和俯仰面相對距離。利用距離、方位面相對距離、俯仰面相對距離3個維度的信息可對目標進行單脈沖三維成像。通過所得目標的三維像,利用目標團聚效應給定合理的閾值選取準則來劃分有、無干擾區域,進而實現干擾對抗。剔除由交叉眼干擾引起的閾值之外的奇異點,從而提取出干擾對抗后的目標角度。
圖5 單脈沖三維成像對抗交叉眼干擾方法流程圖Fig.5 Flow chart of an anti-cross-eye jamming method based on monopulse radar 3D imaging
假設目標與雷達的距離為,方位角為,俯仰角為(={},={},=1,2,…,,為超過檢測電平的散射點數目)。方位面相對距離、俯仰面相對距離分別為
(13)
式中:={};={};={}。
方位角與俯仰角中存在干擾引起的角度奇異值,導致方位面相對距離與俯仰面相對距離這兩參數中出現成像奇異值。可以通過以下準則找到與中對應無干擾區域元素下標:

(14)
式中:∩為交集運算;是在方位面相對距離中選取的閾值(簡稱方位面閾值);是在俯仰面相對距離中選取的閾值(簡稱俯仰面閾值)。
由于目標散射點主要集中在目標的尺寸范圍之內,而干擾引起的奇異點在目標的尺寸范圍之外,可以利用目標的團聚效應選取合適閾值來劃分有、無干擾區域。方位面閾值如下:

(15)

同理,俯仰面閾值的選取準則為
(16)

因此,無干擾區域的方位維相對距離與俯仰維相對距離可表示為
(17)
與之對應地,無干擾的方位角、俯仰角為
(18)
4 仿真實驗及分析
假設目標的三視圖模型如圖6所示,兩個干擾機被放置于飛機機翼兩側,單脈沖雷達在一個相干處理時間內發射2 048個LFM脈沖信號。仿真參數如表1所示。
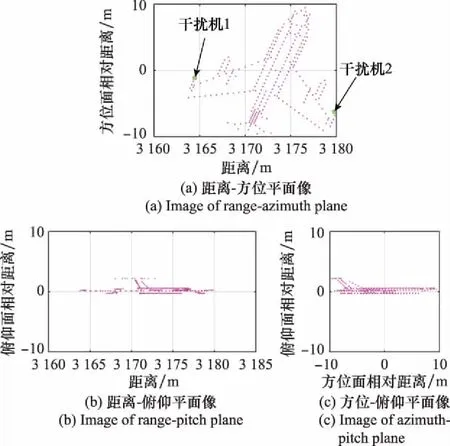
圖6 目標三視圖Fig.6 Three views of the target
表1 仿真參數設置
圖7給出了交叉眼干擾后目標的方位角、俯仰角結果,可以看出方位維與俯仰維測角結果都出現了干擾奇異值。交叉眼干擾后的目標三視圖如圖8(a)、圖8(b)、圖8(c)所示,明顯可以看出目標尺寸之外存在干擾奇異點。圖8(d)為交叉眼干擾后的ISAR像,目標附近存在干擾強散射點。
圖7 交叉眼干擾后的方位角、俯仰角Fig.7 Azimuth and pitch angles after cross-eye jamming
圖8 交叉眼干擾后的目標三視圖、ISAR像Fig.8 Three views and ISAR image of the target after cross-eye jamming
根據第3節的閾值選取準則,分別設定圖8(a)、圖8(b)的閾值為34.1 m、4.6 m。對奇異點進行剔除,對無干擾的點予以保留,即實現了對抗交叉眼干擾。抗干擾后的方位角、俯仰角和目標三視圖如圖9、圖10所示,可以看出抗交叉眼干擾后的目標三視圖與原始目標三視圖一致。
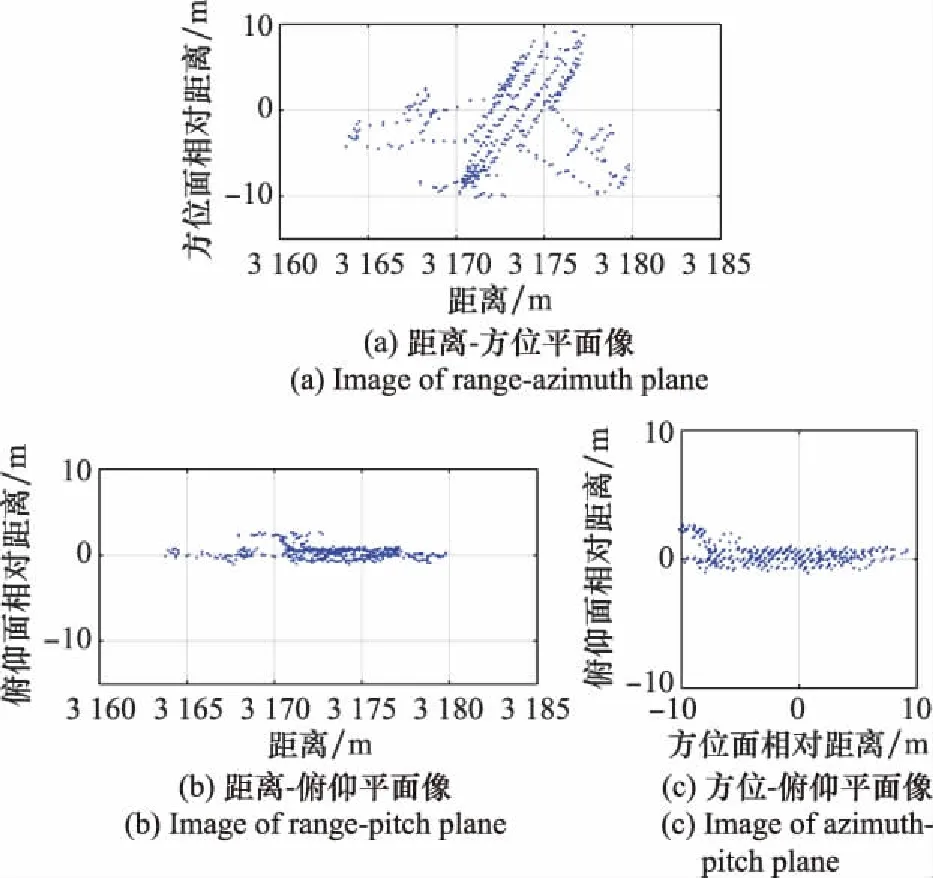
圖9 抗交叉眼干擾后的目標三視圖Fig.9 Three views of the target after anti-cross-eye jamming
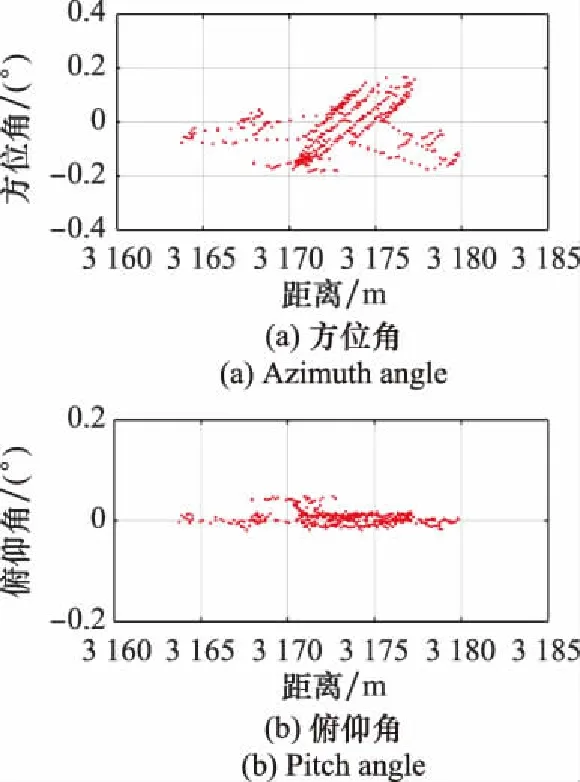
圖10 抗交叉眼干擾后的方位角、俯仰角Fig.10 Azimuth and pitch angle after anti-cross-eye jamming
5 結 論
本文提出一種基于單脈沖三維成像的抗交叉眼干擾方法。該方法通過ISAR技術,對目標實現距離-多普勒兩個維度的高分辨處理,再利用單脈沖雷達測到的方位角和俯仰角計算得到方位面相對距離和俯仰面相對距離,結合距離信息,實現單脈沖三維成像。利用三維像的目標團聚現象,剔除閾值之外的交叉眼干擾引起的奇異點,實現了抗交叉眼干擾。