無動力下肢負(fù)重外骨骼人機動力學(xué)及其儲能元件剛度尤化
2022-04-04 17:48:11曹益張建軍閻強戚開誠郭士杰
振動工程學(xué)報 2022年1期
曹益 張建軍 閻強 戚開誠 郭士杰

摘要:為提高人體搬運效率,降低人體關(guān)節(jié)損害,提高外骨骼能量利用效率,基于人機動力學(xué)對一種無動力輔助負(fù)重下肢外骨骼的儲能元件剛度進行優(yōu)化。應(yīng)用牛頓歐拉動力學(xué)方程建立人機耦合動力學(xué)模型,得到各關(guān)節(jié)力矩與大小腿長度和質(zhì)量、關(guān)節(jié)轉(zhuǎn)角及彈簧剛度關(guān)系的數(shù)學(xué)模型。將三維動作捕捉系統(tǒng)采集的角度數(shù)據(jù)代入動力學(xué)方程中,通過MATLAB進行計算得到關(guān)節(jié)力矩動態(tài)變化規(guī)律。建立人機系統(tǒng)各部分的能量流動模型,并進行步態(tài)周期內(nèi)的能量流動分析,以儲能元件剛度為參數(shù),儲能元件的能量流動為約束條件,各關(guān)節(jié)平均力矩最小為目標(biāo)建立優(yōu)化模型,通過與AnyBody人體仿真軟件獲得的人體模型作對比驗證優(yōu)化結(jié)果的正確性。結(jié)果表明,穿戴優(yōu)化后外骨骼減輕了下肢著地時對人體的沖擊,有效降低了人體能耗和下肢關(guān)節(jié)轉(zhuǎn)矩。
關(guān)鍵詞:人機動力學(xué);負(fù)重外骨骼;能量流動;剛度優(yōu)化
中圖分類號:0313.7;TH113.1
文獻標(biāo)志碼:A
文章編號:10044523( 2022)01-0168-10
DOI: 10.1638 5/j .cnki.issn.10044523.2022.01.018
引 言
可穿戴型下肢外骨骼是一種輔助人體下肢運動的仿人型機器人,其中助力型外骨骼面向健康人群,具有輔助人體負(fù)重的功能[1]。
在該領(lǐng)域中,研究最早的為含動力助力型外骨骼,如由美國加州大學(xué)伯克利分校研制,采用液壓驅(qū)動的伯克利下肢末端外骨骼(BLEEX)[2],整體結(jié)構(gòu)為開鏈結(jié)構(gòu);以色列研發(fā)的第一款獲得FDA認(rèn)可的外骨骼ReWalk[3],采用了體感芯片,捕捉患者肢體動作,感應(yīng)患者重心的變化,模仿行走步態(tài),協(xié)助下肢截癱的患者重新行走;意大利特倫托大學(xué)研制的一種全身外骨骼機構(gòu)[4]需要外接電源驅(qū)動,且含有氣動元件;但是該類外骨骼存在續(xù)航時間短、人機協(xié)調(diào)能力低[5]J等問題。無動力外骨骼不需外接電源,避免了續(xù)航時間的問題,如浙江大學(xué)提出了一種無驅(qū)動含柔性關(guān)節(jié)的下肢外骨骼[6],可以通過膝關(guān)節(jié)將負(fù)載傳遞到地面,并通過髖關(guān)節(jié)彈簧儲能元件輔助行走以達到節(jié)省人體能耗的目的;卡內(nèi)基梅隆大學(xué)設(shè)計了一種無動力踝關(guān)節(jié)外骨骼[7],通過輕質(zhì)彈簧裝置實現(xiàn)小腿肌肉和跟腱的類似功能,從而減少了人體行走的代謝成本。
然而上述無動力外骨骼兼具高承載能力、高能源利用率和較好協(xié)調(diào)能力的構(gòu)型較少,問題在于:第一,缺乏儲能元件,人體能源利用率較低;第二,未對人機協(xié)同問題進行深入研究;第三,對能量研究缺乏深入,能量回收過程轉(zhuǎn)化效率低,導(dǎo)致能量損失較多。對于第一個問題,張建軍等[8]提出了一種新型外骨骼,采用耦合雙閉鏈結(jié)構(gòu)并安裝彈性儲能元件予以解決,此外為實現(xiàn)降低人體能耗,提高人體工作效率的目的,設(shè)計了由兩彈簧同軸疊加構(gòu)成的儲能元件。將重物勢能轉(zhuǎn)化為機構(gòu)彈性勢能儲存起來,并在下一步態(tài)中作為動能釋放,以此來實現(xiàn)重力勢能的循環(huán)應(yīng)用。因此該部件是本外骨骼的關(guān)鍵元件,有必要對其剛度進行優(yōu)化。
針對無動力外骨骼能量及彈簧剛度優(yōu)化問題,朱策策等[9]從靜力學(xué)分析對外骨骼進行剛度優(yōu)化,鄭超[10]針對人體行走奔跑過程中能量流動特性進行分析。對本外骨骼人機耦合中基于能量的同軸心雙彈簧進行優(yōu)化的研究相對較少。
本文基于張建軍等引提出的適用于健康人群進行負(fù)重作業(yè)的無動力下肢外骨骼,通過建立人機動力學(xué)模型來分析動態(tài)力矩。應(yīng)用關(guān)節(jié)功率法獲得各關(guān)節(jié)處功率的動態(tài)變化。對人機系統(tǒng)負(fù)重行走的能量進行研究。在人體做負(fù)功時由外骨骼儲能元件進行補償。通過優(yōu)化該儲能元件的剛度,保證負(fù)重行走過程中人體各關(guān)節(jié)所需提供的有效轉(zhuǎn)矩最小,有效減輕人體能耗。
1 外骨骼機構(gòu)描述
無動力外骨骼的設(shè)計原理如卜:
(1)從機構(gòu)的負(fù)載與剛度出發(fā),外骨骼結(jié)構(gòu)采用雙支鏈組成的閉鏈機構(gòu)。
(2)為減輕人體負(fù)擔(dān),以后部支鏈作為主要傳遞支鏈,將負(fù)重南人體轉(zhuǎn)移至地面。
(3)為提高人體能源利用率,基于人體儲能策略,設(shè)計一種變剛度儲能元件。
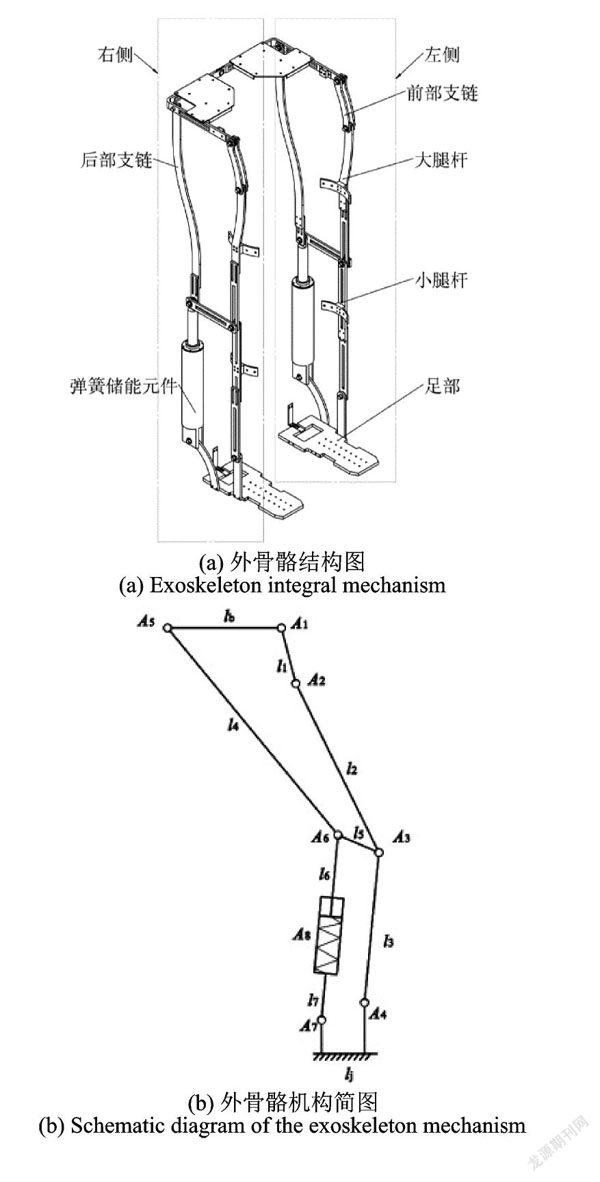
根據(jù)設(shè)計原理,該外骨骼分為左右兩個對稱部分,分別對應(yīng)人體的左腿和右腿,外骨骼結(jié)構(gòu)圖如圖1(a)所示,前后兩條支鏈由桿件和轉(zhuǎn)動副組成,儲能元件與后部小腿連桿構(gòu)成移動副,機構(gòu)簡圖如圖1(b)所示。人體負(fù)重行走形時,腿部通過與前部支鏈綁縛,以驅(qū)動外骨骼前進,增強人機協(xié)凋性,實體樣機穿戴如圖1(c)所示,左右兩側(cè)分別有4個自南度,并在髖部設(shè)置側(cè)向轉(zhuǎn)動副,滿足人體正常行走姿態(tài)。
位于后部支鏈的儲能元件如岡2所示,在步態(tài)后期起到儲能的效果。通過各元件的共同作用實現(xiàn)對能量循環(huán)利用的目的。
2 人機耦合動力學(xué)模型
2.1 特征參數(shù)合成
南于人類意識先于外骨骼,現(xiàn)有的機械運動模型不足以分析系統(tǒng)動力學(xué)。因此,需要建立人機耦合運動模型分析動態(tài)力矩變化。
人體肢體與外骨骼機構(gòu)在質(zhì)量、轉(zhuǎn)動慣量等特性參數(shù)上存在差異[11],需要合成特征參數(shù)來平衡人與外骨骼的兩種運動。若只考慮矢狀面運動[12],則卜肢的運動如圖3所示。組件分別是足部B5、小腿B4、外骨骼小腿B3、大腿B2和外骨骼大腿B1。
通過平衡人體與外骨骼的重量和桿件長度,找到人機耦合情況下人體下肢各部位的質(zhì)心相對
2.2 人機耦合動力學(xué)模型
人機耦合的牛頓一歐拉動力學(xué)方程各桿件的動力學(xué)模型如圖4--7所示。
后部支鏈?zhǔn)芰Ψ治鋈鐖D8所示:負(fù)重主要由后部支鏈轉(zhuǎn)移至地面,且儲能元件為主要承力機構(gòu),因此分析行走過程中由lk變化引起的儲能元件受力。儲能元件為同軸心重疊雙彈簧,在單個步態(tài)支撐周期內(nèi),人體穿戴外骨骼負(fù)重行走時順次壓縮兩個彈簧,剛度分別為島與k2,在步態(tài)支撐周期前中期壓縮長彈簧時,儲能元件受力為:
在求得力F5,F(xiàn)6前提下,通過角α2,α3建立三角函數(shù),如下式所示,可對后部支鏈各桿件及膝部連接桿進行受力分析:gzslib202204041759由以上的力、力矩平衡方程代人消去桿件之間作用力,可解得各關(guān)節(jié)力矩Mi,表達式如下式所示:
2.3 人體下肢關(guān)節(jié)角度信號采集
對下肢各關(guān)節(jié)動力學(xué)求解,需要人體各關(guān)節(jié)的運動信息,對人體下肢關(guān)節(jié)角度進行信號采集實驗。
實驗選用FASTCAM SA-X29三維運動捕捉[13]和分析系統(tǒng)對身高175 cm,體重80 kg的受試者進行運動數(shù)據(jù)采集,如圖9所示。試驗人員穿著試驗服,在左腳踝和右腳踝、左膝關(guān)節(jié)和右膝關(guān)節(jié)、右髖關(guān)節(jié)和右髖關(guān)節(jié)等重要部位粘貼識別點。用高速攝像機捕捉實驗者的運動數(shù)據(jù)。可以很容易地獲得髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)的角度運動變化數(shù)據(jù),再對原始數(shù)據(jù)進行數(shù)據(jù)提取,將歐拉角換算成弧度,得到人體下肢關(guān)節(jié)角運動數(shù)據(jù),如圖10所示。
2.4 基于Simmechanics的人機耦合的下肢建模
基于動力學(xué)方程,在Simmechanics中建立人機耦合的下肢模型[14],如圖11所示,將信號采集的角度進行多項式擬合得到角位移函數(shù),對角度進行求導(dǎo)計算出各關(guān)節(jié)的角速度、角加速度,再將每一時刻各關(guān)節(jié)的角度、角速度,角加速度以及模型的其他參數(shù)作為模型的輸人參數(shù),定義子模塊關(guān)節(jié)驅(qū)動。
根據(jù)已計算出的力矩表達式,確定模型中的各個參數(shù),儲能元件基本參數(shù)如表1所示,人體模型參數(shù)如表2所示[16]。計算所得到的數(shù)據(jù)將作為動力學(xué)公式所需參數(shù)。
對模型進行參數(shù)配置并運行,得到了髖、膝、踝三個下肢關(guān)節(jié)的動態(tài)力矩變化。進而建立相應(yīng)的能量模型和優(yōu)化模型對彈簧剛度進行優(yōu)化。
3 人機耦合負(fù)重行走能量模型
3.1 人機耦合負(fù)重行走能量流動方程
在人體穩(wěn)定行走步態(tài)中,重力和人體驅(qū)動關(guān)節(jié)做功,在整個運動階段系統(tǒng)的能量守恒[16]。能量的轉(zhuǎn)化和守恒與人體穩(wěn)定行走有著密切的關(guān)系。為了更清晰地說明人機耦合運動過程中動能、勢能和功率的關(guān)系,將利用五桿模型來分析能量在肢體間傳遞與轉(zhuǎn)換的關(guān)系,如圖12所示。
以此說明人機耦合在負(fù)重穩(wěn)定行走的運動過程中的能量流動規(guī)律,通過機械能的變化量確定系統(tǒng)所需要的能量。為人機耦合外骨骼的能耗分析提供理論支持。
3.2 人機耦合負(fù)重行走人體能耗計算方法
在人機耦合負(fù)重行走條件下,采用關(guān)節(jié)功率法[17]求解功率。將關(guān)節(jié)視做功源,則該關(guān)節(jié)做功的功率為:
以此可以得到各關(guān)節(jié)驅(qū)動力的做功變化量,更加簡單地求解人體的最低能耗。
3.3 人機耦合負(fù)重行走過程能量分析
人體負(fù)重行走時的能量應(yīng)隨負(fù)重行走的運動姿態(tài)而改變,結(jié)合人體行走時的能量轉(zhuǎn)化,以確定最優(yōu)的彈簧剛度。
建立人體一外骨骼系統(tǒng)負(fù)重行走情況下的五桿模型,如圖13所示。整個運動過程,人體一外骨骼系統(tǒng)的總能量應(yīng)當(dāng)為重物能量、外骨骼、人體外骨骼系統(tǒng)行走時動能、勢能的累加能量的總和,如下式所示:
將人體運動過程簡化為五桿模型,分別為軀干、左小腿、左大腿、右大腿、右小腿。其中左腿,右腿的后部支鏈又包含儲能彈簧。C1-C5分別為左小腿、左大腿、軀干、右大腿、右小腿的質(zhì)心點,各部位的質(zhì)量分別為m1--m5,左右腿的各部位長度應(yīng)相等,根據(jù)之前建立的人機耦合的模型,尋找到各部位質(zhì)心在坐標(biāo)中的相對位置,用以求得各部位在行走過程中的能量,以支撐腳踝關(guān)節(jié)為零勢能點。
質(zhì)點系從某位置到其“零勢能位置”的運動過程中,各有勢能的力做功的代數(shù)和為此質(zhì)點系在該位置的勢能。如下式所示:
V=mg(yci-yci-1)
(28)式中ya為質(zhì)點坐標(biāo)。
做平面運動的剛體的動能,等于隨質(zhì)心平移的動能與繞質(zhì)心轉(zhuǎn)動的動能的和,如下式所示:式中 vc為質(zhì)心速度;Je為對質(zhì)心軸的轉(zhuǎn)動慣量。
本外骨骼為無動力儲能式輔助負(fù)重外骨骼,在機構(gòu)中存在儲能彈簧,存在彈性勢能和重力勢能、動能之間的轉(zhuǎn)化。彈簧勢能Vk為:式中 k為彈簧的剛度系數(shù);v為彈簧形變量。
4 儲能元件剛度優(yōu)化
4.1 目標(biāo)函數(shù)及約束條件
提出一種節(jié)能方案:儲能元件在行走過程中代替人體做功,將重力勢能轉(zhuǎn)化為白身的勢能儲存,在關(guān)節(jié)需要做功的階段將能量釋放以此來實現(xiàn)重力勢能的循環(huán)應(yīng)用。
利用之前的動力學(xué)方程和此前得到的能量分析,進行多目標(biāo)優(yōu)化,對儲能元件剛度進行優(yōu)化,在人體負(fù)重行走時表現(xiàn)出更好的性能,可以有效地減少行走時各關(guān)節(jié)的轉(zhuǎn)矩和人體能量的消耗。
由于轉(zhuǎn)矩屬于矢量[18],為了更加準(zhǔn)確地求解出一個步態(tài)支撐周期內(nèi)各關(guān)節(jié)的有效轉(zhuǎn)矩,采用均方根值法對整個周內(nèi)不同關(guān)節(jié)角度的轉(zhuǎn)矩進行求和。
以下肢各關(guān)節(jié)由負(fù)載產(chǎn)生的總有效轉(zhuǎn)矩作為目標(biāo)函數(shù),建立優(yōu)化模型如下式所示:
外骨骼儲能元件剛度優(yōu)化模型的約束條件:
1)在彈簧單側(cè)下肢從站立中期足跟著地到站立末期足尖離地的過程中,重物的能量轉(zhuǎn)化為彈性勢能并儲存,遵守能量守恒定律,并減少人體能耗。
2)一個步態(tài)周期內(nèi),優(yōu)化后三個關(guān)節(jié)由負(fù)載產(chǎn)生的平均轉(zhuǎn)矩應(yīng)減少。
3)彈簧剛度應(yīng)始終大于0,短彈簧的剛度應(yīng)大于長彈簧的剛度。
4)關(guān)節(jié)傾角不超過人體正常行走關(guān)節(jié)傾角的值,行走步態(tài)不發(fā)生改變。
4.2 優(yōu)化方法、參數(shù)設(shè)置及優(yōu)化結(jié)果
已知待優(yōu)化的數(shù)學(xué)模型中有變剛度的儲能元件,行走過程中順次壓縮兩個彈簧。設(shè)定優(yōu)化參數(shù)為k1,k2。利用MATLAB中的極值函數(shù)用于求取不等式約束的單變量非線性規(guī)劃問題
的極大極小值。以此對該剛度
優(yōu)化模型進行求解,目標(biāo)函數(shù)如式(31)所示,各關(guān)節(jié)轉(zhuǎn)角θi,機構(gòu)的尺寸參數(shù)lkt,hi,lk2為已知變量。通過目標(biāo)函數(shù),根據(jù)之前建立的動力學(xué)數(shù)學(xué)模型,得到人體關(guān)節(jié)力矩與人體身高體重及各關(guān)節(jié)角度的關(guān)系,應(yīng)用關(guān)節(jié)功率法,能量的數(shù)學(xué)模型來白于關(guān)節(jié)力矩動力學(xué)的數(shù)學(xué)模型,所以在約束條件下實現(xiàn)關(guān)節(jié)力矩最小,即實現(xiàn)了人體能耗降低。在人體身高175cm、體重80 kg組合確定的情況下,長彈簧剛度k1和短彈簧剛度k2的優(yōu)化結(jié)果如圖14所示。gzslib202204041759求解出目標(biāo)函數(shù)f(x)的最小值,從圖中可以看出紫色區(qū)域處于圖像最低點,即關(guān)節(jié)力矩最小,得到優(yōu)化參數(shù)的最優(yōu)解,如表3所示。
4.3 優(yōu)化后的仿真驗證及結(jié)果分析
優(yōu)化后的結(jié)果需與AnyBody相關(guān)軟件建模[19]。獲得的人體模型和未優(yōu)化前穿戴下肢外骨骼行走時各關(guān)節(jié)產(chǎn)生的轉(zhuǎn)矩、功率以及外骨骼系統(tǒng)的能耗作比較,來檢測人體能耗的降低程度。
將步態(tài)支撐周期內(nèi),穿戴下肢外骨骼前后,人體髖、膝、踝關(guān)節(jié)產(chǎn)生的轉(zhuǎn)矩進行對比,如圖15所示。人體模型在未穿戴下肢外骨骼時,3條動態(tài)曲線在局部都有不同程度的震蕩沖擊,且震蕩位置都在0.6 s附近。通過對照人體行走步態(tài),該時刻處于擺動腳著地的時刻,由此可知,人體在擺動腿著地瞬間會產(chǎn)生沖擊,造成關(guān)節(jié)力矩的震蕩。由圖可知,穿戴外骨骼可有效減輕對關(guān)節(jié)的震蕩沖擊,與未穿戴下肢外骨骼模式相比,穿戴下肢外骨骼模式的各關(guān)節(jié)力矩顯著減少,優(yōu)化后各關(guān)節(jié)力矩的減少更為明顯。膝關(guān)節(jié)和踝關(guān)節(jié)減少較多,約為25%。但踝關(guān)節(jié)峰值出現(xiàn)了滯后。
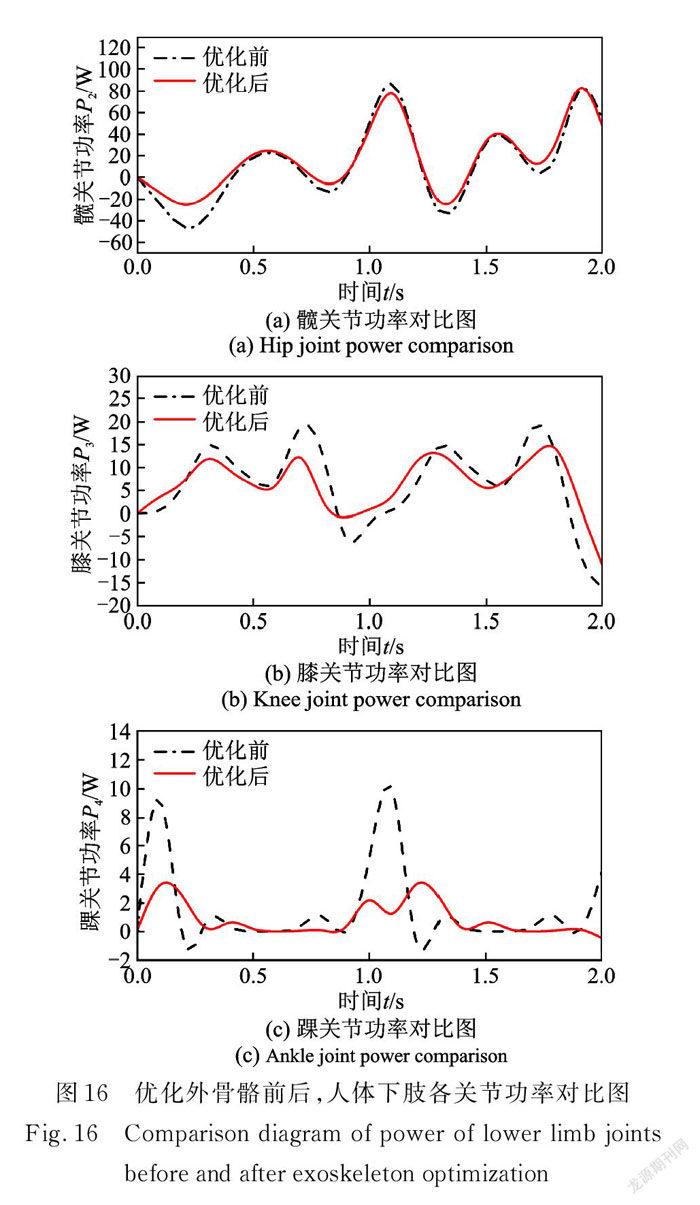
如圖16功率曲線所示,髖關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié)在一個步態(tài)周期內(nèi),都存在功率為負(fù)值的階段。對于優(yōu)化儲能元件剛度后的外骨骼,實現(xiàn)了對人體能耗的減少,在關(guān)節(jié)做負(fù)功時儲能元件能有效地代替人體做功,將重物的重力勢能儲存,實現(xiàn)了勢能的循環(huán)利用,外骨骼的性能得到了較大的改善。
如圖17所示,通過之前建立的外骨骼系統(tǒng)的五桿模型,外骨骼系統(tǒng)優(yōu)化前后的能量守恒,驗證了求解過程的正確性,說明穿戴下肢外骨骼能有效地減少人體能耗。
5 結(jié)論
(1)通過牛頓一歐拉動力學(xué)方法建立人機耦合的動力學(xué)數(shù)學(xué)模型,根據(jù)人體參數(shù)計算出了動力學(xué)方程中需要的人體大小腿的長度、質(zhì)量以及轉(zhuǎn)動慣量等參數(shù),將三維運動采集設(shè)備采集的關(guān)節(jié)角數(shù)據(jù)計算處理后導(dǎo)人到MATLAB中,對人機耦合動力學(xué)模型進行求解計算,得到了髖、膝、踝三個下肢關(guān)節(jié)的動態(tài)力矩的變化規(guī)律。
(2)基于能量守恒定律和能量流動特性,建立人體下肢能量流動方程和人體一外骨骼系統(tǒng)負(fù)重行走情況下的五桿模型,通過對比優(yōu)化前后外骨骼系統(tǒng)能量的變化來驗證系統(tǒng)的機械能守恒,為外骨骼能量分析提供參考。
(3)結(jié)合關(guān)節(jié)轉(zhuǎn)矩的動力學(xué)模型以及目標(biāo)函數(shù)建立儲能元件剛度的優(yōu)化模型。保證了無動力外骨骼最大程度減少了關(guān)節(jié)產(chǎn)生的轉(zhuǎn)矩。膝關(guān)節(jié)和踝關(guān)節(jié)減少較多,約為25%。通過對比分析,人體穿戴優(yōu)化后外骨骼,有效地減輕了下肢著地時對人體的沖擊,減少了人體下肢各關(guān)節(jié)轉(zhuǎn)矩。因此,穿戴外骨骼后能有效地降低人體能耗。
參考文獻:
[1]Robert B. Exoskeletons-a review of industrial applications[ J] . The Industrial Robot , 2018 , 45( 5) : 585590.
[2]Yan T, Cempini M , Oddo C M , et al. Review of assis-tive strategies in powered lowerlimb orthoses and exoskeletons [Jl. Robotics and Autonomous Systems,2015 . 64 : 120-136.
[3]Tagliamonte N L, Sergi F, Carpino G, et al.Human-robot interaction tests on a novel robot for gaitassistance [ C ] . Proceedings of IEEE International Con-ference
on
Rehabilitation
Robotics,
Seattle ,
USA,2013 : 1-6.
[4]Kawale S S, Sreekumar M. Design of a wearable lowerbody exoskeleton mechanism for shipbuilding industry[Jl. Procedia Computer Science, 2018. 133: 1021-1028.
[5]Chen Guiliang, Guo Jianli, Liu Gengqian. Dynamicsanalysis and PID control of knee joint of lower limb rehabilitation robot [Jl. Joumal of Hebei University ofTechnology, 2013, 42( 5) : 71-76.
[6]王東海,基于行走步態(tài)的被動式重力支撐柔性下肢外骨骼系統(tǒng) [D] .杭州 :浙江大學(xué) , 2016 .
Wang Donghai. Flexible lower limb exoskeleton supported by passive gravity based on walking gait [Dl.Hangzhou : Zhejiang University , 2016.
[7]Collins S H,Wiggin M B,Sawicki G S.Reducing theenergy cost of human walking using an unpowered exo—skeleton[J].Nature,2015,522(7555):212 215.
[8]張建軍,李天宇,王曉慧,等.一種輔助負(fù)重人體下肢外骨骼:ZLl05798893B[P],2017—9—12.
Zhang Jianjun,Li Tianyu,Wang Xiaohui,et al.Anauxiliary weight_bearing exoskeleton of lower limbs:ZLl05798893B[P],2017 9一12.gzslib202204041759[9]朱策策,張建軍,閻強,等.無動力儲能式輔助負(fù)重外骨骼彈簧剛度優(yōu)化[J].機械設(shè)計與研究,2019,35(03):25—29+36.
Zhu Cece,Zhang Jianjun,Yan Qiang,et al.0ptimiza—tion of the spring stiffness of an auxiliary weight_bearingexoskeleton without power storage[J].Mechanical De—sign and Research,2019,35(03):25 29+36.
[10]鄭超.基于人體能量流動特性的外骨骼低能耗驅(qū)動關(guān)節(jié)的研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2016.
Zheng Chao.Research on exoskeleton low—energy drivejoint based on human energy fl.w characteristics[D].Harbin:Harbin Institute of Techn0109y,2016.
[11]Guo Q,Li S,Jiang D.A 10wer extremlty exoskeleton:Human Machine c.upled modeling,robust c.ntr01 de一sign,simula“on,and overload carrying experiment[J].Mathematical ProblemS in Engineering,2015:905761.
[12]Neptune R R,Mcgowan C P.Muscle contributions towh01e_body sagittal plane angular momentum duringwalking[J].Journal of Biomechanics,2010,44(1):6 12.
[13]Yan Q,Zhang J J,Li B,et al.Kinematic analysis anddynamic optimlzatlon simulati.n of a novel unpoweredex.skeleton with para11el top01.gy[J].Joumal of Robot—ics,2019,(1):1 12.
[14]王硯,黎明安.Matlab/Simulink動力學(xué)系統(tǒng)建模與仿真[M].北京:機械工業(yè)出版社,2018.
Wang Yan,Li Ming an.Matlab/Simulink DynamicsSystem Modeling and Simulation[M].Beijing:ChinaMachinery Industry Press,2018.
[15]中華人民共和國國家技術(shù)監(jiān)督局.中國成年人人體尺寸:GB/T 10000 1998[S].北京:中國標(biāo)準(zhǔn)出版社,2004.
National Technical Supervision Bureau of the People 7sRepublic of China.Chinese adult human body size:GB/T 10000 1998[S].Beijing: China Standard Press,2004.
[16]Jing Fang,Yuan Yuan.Human in the l00p optimizationof wearable robots to reduce the human metab01ic ener—gy c.st in physical movements[J].R.botics and Auton—omous Systems,2020,127.
[17]蘆坤,周興龍,閆松華,等.人體日常活動機械功及能量效率的初步研究[J].北京生物醫(yī)學(xué)工程,2014,33(2):153-159+216.
Lu Kun, Zhou Xinglong, Yan Songhua, et al. Preliminary study on mechanical work and energy efficiency ofhuman daily activities[J].Beijing Biomedical Engineering, 2014, 33(2):153-159+216.
[18]許鴻謙.助力外骨骼人機系統(tǒng)動力與能量驅(qū)動特征研究[D].成都:西南交通大學(xué),2018.
Xu Hongqian. Study on dynamic and energy drive characteristics of human-machine system with powerassisted exoskeleton [ D ] . Chengdu : Southwest Jiaotong University, 2018.
