自適應(yīng)巡航控制系統(tǒng)的設(shè)計(jì)及硬件在環(huán)仿真
2022-04-02 06:25:42李世豪
汽車實(shí)用技術(shù) 2022年6期
黃 鵬,何 通,李世豪
(長(zhǎng)安大學(xué) 汽車學(xué)院,陜西 西安 710064)
目前自適應(yīng)巡航控制系統(tǒng)著重單一穩(wěn)態(tài)跟隨工況的研究,然而現(xiàn)實(shí)中交通環(huán)境是多樣和隨機(jī)的,及時(shí)恰當(dāng)?shù)哪J角袚Q策略對(duì)于自適應(yīng)巡航控制(Adaptive Cruise Control, ACC)系統(tǒng)有著關(guān)鍵意義。文獻(xiàn)[1]為盡可能消除模式切換時(shí)加速度跳變現(xiàn)象,采用加速度加權(quán)平均算法來(lái)減少車輛在模式切換過(guò)程中的抖振,但該方法無(wú)法徹底消除這一現(xiàn)象。文獻(xiàn)[2]提出一種在定速巡航模式下虛擬前車的方法,與常規(guī)模式切換策略相比系統(tǒng)響應(yīng)更加平穩(wěn)。本文上位控制器的設(shè)計(jì)采用線性二次型調(diào)節(jié)器(linear quadratic regulator, LQR),并在虛擬前車方法的基礎(chǔ)上設(shè)計(jì)了模式切換策略。
硬件在環(huán)仿真測(cè)試可以在實(shí)車測(cè)試前對(duì)控制器進(jìn)行功能驗(yàn)證,對(duì)于開發(fā)周期的縮短和成本的降低均有重要意義。文獻(xiàn)[3]對(duì)設(shè)計(jì)的自適應(yīng)巡航控制器在Matlab/Simulink中建立系統(tǒng)模型進(jìn)行仿真。文獻(xiàn)[4]對(duì)設(shè)計(jì)的 ACC 系統(tǒng)在 Carsim 和Simulink中進(jìn)行典型工況聯(lián)合仿真試驗(yàn)。文獻(xiàn)[3]和文獻(xiàn)[4]對(duì)ACC系統(tǒng)的測(cè)試均在純仿真階段。文獻(xiàn)[5]對(duì)設(shè)計(jì)的考慮車間反應(yīng)距離的 ACC系統(tǒng)進(jìn)行了實(shí)車試驗(yàn)。目前對(duì)于ACC系統(tǒng)硬件在環(huán)仿真研究較少,本文首先基于 Simulink和 PreScan對(duì)ACC系統(tǒng)進(jìn)行聯(lián)合仿真,驗(yàn)證算法的可行性,然后生成代碼并下載到電子控制單元(Electronic Control Unit, ECU),最后搭建基于dSPACE的硬件在環(huán)仿真平臺(tái),對(duì)設(shè)計(jì)的ACC控制器功能進(jìn)行充分驗(yàn)證。
1 自適應(yīng)巡航控制系統(tǒng)總體設(shè)計(jì)
本文采用上、下位控制器模式設(shè)計(jì)了ACC控制系統(tǒng),圖 1為自適應(yīng)巡航控制系統(tǒng)總體結(jié)構(gòu)。上位控制器負(fù)責(zé)接收自車車速和傳感器檢測(cè)到的車間相對(duì)距離與相對(duì)速度Δ,首先確定出期望車距、期望車間距誤差Δ,然后通過(guò)狀態(tài)切換策略決定進(jìn)入速度控制模式或距離控制模式,最后LQR控制器根據(jù)Δ和Δ計(jì)算出期望加速度;下位控制器首先根據(jù)上位控制器得出的通過(guò)切換策略決定進(jìn)入驅(qū)動(dòng)或制動(dòng)模式,進(jìn)而由逆縱向動(dòng)力學(xué)模型計(jì)算得到期望節(jié)氣門開度和制動(dòng)壓力,最后將和傳入車輛動(dòng)力學(xué)模型,實(shí)現(xiàn)對(duì)車速和車距的自適應(yīng)控制。

圖1 自適應(yīng)巡航控制系統(tǒng)總體結(jié)構(gòu)
2 上位控制器的設(shè)計(jì)
2.1 安全車距的計(jì)算
安全車距決定了ACC系統(tǒng)的跟車距離,安全車距過(guò)小容易造成危險(xiǎn)工況,安全車距過(guò)大容易被旁車道車輛換道插入,意味著跟車效率下降。因此,合理的安全車距能較好地適應(yīng)多變的交通環(huán)境,保證安全性與跟車效率的平衡。
文獻(xiàn)[6]提出了可變安全車距模型

式中,為安全車距;為自車車速;為前車車速;為駕駛員和車輛的反應(yīng)時(shí)間;為最小制動(dòng)減速度;Δ為停車時(shí)兩車安全車距。
具體到車輛,、、Δ均為定值,此處取 0.8 s,取 5.5 m/s,Δ取 3 m。行駛中防止前車因碰撞或其他因素導(dǎo)致車速突變?yōu)?,為保證自車安全性,取為0 m/s,化簡(jiǎn)式(1)得到

文獻(xiàn)[5]通過(guò)車間反應(yīng)距離判斷自車對(duì)目標(biāo)車輛作出反應(yīng)的時(shí)機(jī)

式中,表示車間反應(yīng)時(shí)距。

式中,為定速巡航車速;=2.5 s為設(shè)定的安全時(shí)距,式(3)可化簡(jiǎn)為

在速度控制模式下,當(dāng)目標(biāo)車輛在車間反應(yīng)距離之外時(shí)(>),不受前車影響繼續(xù)保持駕駛員設(shè)定的巡航車速行駛,當(dāng)車距減小到車間反應(yīng)距離之內(nèi)時(shí)(≤),進(jìn)入距離控制模式。
2.2 LQR控制器的設(shè)計(jì)
最優(yōu)控制是在給定約束條件下,尋求使得系統(tǒng)性能指標(biāo)達(dá)到極大(或極小)的反饋控制,ACC系統(tǒng)的設(shè)計(jì)是一個(gè)典型的最優(yōu)控制問(wèn)題。可以用狀態(tài)空間方程來(lái)描述自車與前車之間的運(yùn)動(dòng)關(guān)系
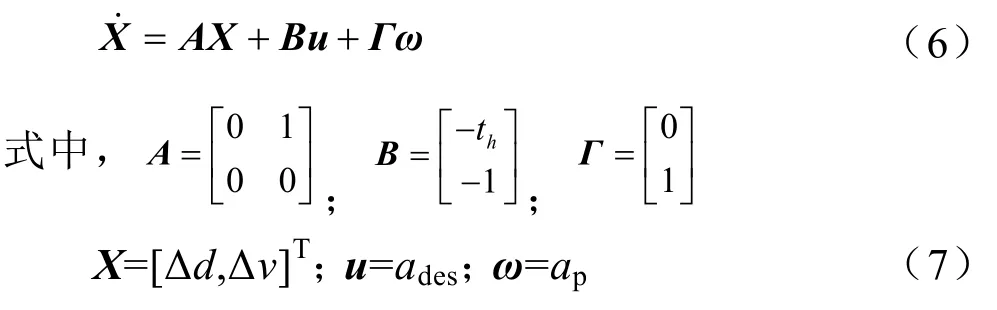
式中,表示狀態(tài)量;表示自車加速度是系統(tǒng)控制量;為目標(biāo)車輛加速度;表示系統(tǒng)擾動(dòng)量。由于rank[]=2滿秩,因此通過(guò)控制系統(tǒng)可控準(zhǔn)則判斷上述系統(tǒng)具有完全可控性。
為了同時(shí)減少理想車距誤差 Δ和相對(duì)車速Δ,引入線性二次優(yōu)化性能指標(biāo)函數(shù)

式中,為狀態(tài)量權(quán)重系數(shù);為控制量權(quán)重系數(shù)。

以性能指標(biāo)函數(shù)最小為目標(biāo),最優(yōu)控制為

式中,為狀態(tài)反饋系數(shù)矩陣,=diag[,]。選擇適當(dāng)?shù)臋?quán)重系數(shù),經(jīng)比較不同值的控制效果最終選取1,6,18,計(jì)算得到0.235 7,0.542。為避免期望加速度過(guò)大超出正常范圍或引起乘員不適,用飽和限制函數(shù)將限制在[0.4,0.3]的范圍內(nèi)。
2.3 狀態(tài)切換策略
在真實(shí)行車環(huán)境中,在各種狀態(tài)之間準(zhǔn)確、平穩(wěn)切換對(duì)汽車安全性和乘坐舒適性具有重要意義。上位控制器控制模式切換流程如圖2所示。

圖2 上位控制器模式切換策略
(1)首先判斷是否檢測(cè)到目標(biāo)車輛,檢測(cè)到目標(biāo)車輛時(shí)==1;
(2)當(dāng)沒(méi)有檢測(cè)到目標(biāo)車輛(==0)或者前車在控制距離之外(>)或者前車車速大于設(shè)定的定速巡航車速(>)時(shí),切換到速度控制模式,此時(shí)設(shè)置一虛擬車輛以設(shè)定巡航車速始終行駛在安全距離位置,即=,Δ=0,Δ=-;
(3)當(dāng)檢測(cè)到目標(biāo)車輛(==1)且位于控制距離之內(nèi)(≤)并且前車車速小于設(shè)定巡航車速(≤)時(shí),切換回距離控制模式,此時(shí)上位控制器使用傳感器實(shí)際檢測(cè)到的前車信息,即目標(biāo)車輛車速=+Δ,期望車距誤差Δ=;
(4)經(jīng)過(guò)狀態(tài)切換層的決策,將速度差Δ和期望車間距誤差Δ傳入LQR控制器計(jì)算得到期望加速度。
3 逆縱向動(dòng)力學(xué)模型
逆縱向動(dòng)力學(xué)模型由驅(qū)動(dòng)模塊和制動(dòng)模塊組成,實(shí)際制動(dòng)時(shí)應(yīng)首先充分利用發(fā)動(dòng)機(jī)和傳動(dòng)系統(tǒng)的倒拖、道路阻力和空氣阻力,當(dāng)減速度不滿足制動(dòng)需求時(shí)采用制動(dòng)系統(tǒng)的制動(dòng)力。在dSPACE車輛仿真模型(Automotive Simulation models,ASM)里進(jìn)行帶擋滑行試驗(yàn),圖 3為測(cè)出的對(duì)應(yīng)不同車速下的滑行減速度。為避免自適應(yīng)巡航系統(tǒng)在曲線附近位置頻繁驅(qū)動(dòng)、制動(dòng)切換,破壞乘坐舒適性,設(shè)置厚度為(+)的緩沖層,緩沖層厚度過(guò)小不能解決頻繁驅(qū)動(dòng)、制動(dòng)轉(zhuǎn)換的問(wèn)題,緩沖層厚度過(guò)大會(huì)引起系統(tǒng)響應(yīng)滯后,進(jìn)而發(fā)生控制超調(diào)。經(jīng)過(guò)多次驅(qū)動(dòng)、制動(dòng)跟隨試驗(yàn),確定出為 0.05 m/s,為 0.1 m/s。

圖3 帶擋滑行減速度
上位控制器將解算得到的期望加速度輸入下位控制器,在對(duì)應(yīng)車速下,當(dāng)≥+時(shí)進(jìn)入驅(qū)動(dòng)模式,當(dāng)≤+時(shí)進(jìn)入制動(dòng)模式,當(dāng)<<+時(shí)保持上一狀態(tài)不變。
3.1 驅(qū)動(dòng)控制
進(jìn)入驅(qū)動(dòng)模式后,通過(guò)上位控制器計(jì)算得出的期望加速度求解所需發(fā)動(dòng)機(jī)扭矩,對(duì)應(yīng)扭矩和發(fā)動(dòng)機(jī)轉(zhuǎn)速在逆發(fā)動(dòng)機(jī)map圖里確定節(jié)氣門開度。
汽車行駛方程式為
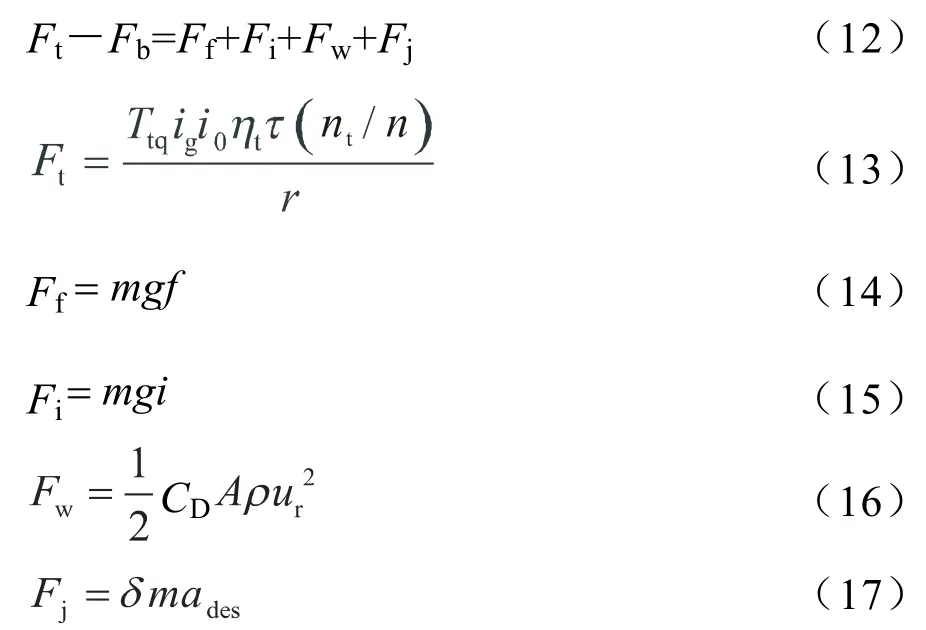
式中,為地面制動(dòng)力,由于驅(qū)動(dòng)時(shí)無(wú)制動(dòng)器制動(dòng)力,因此地面制動(dòng)力=0;為驅(qū)動(dòng)力;為發(fā)動(dòng)機(jī)扭矩;為變速器傳動(dòng)比;為主減速器傳動(dòng)比;為傳動(dòng)系機(jī)械效率;為液力變矩器渦輪轉(zhuǎn)速;為發(fā)動(dòng)機(jī)轉(zhuǎn)速;(/)為液力變矩器轉(zhuǎn)矩特性函數(shù);為車輪滾動(dòng)半徑;為滾動(dòng)阻力;為滾動(dòng)阻力系數(shù);為汽車質(zhì)量;為坡道阻力;為道路坡度;為重力加速度;為空氣阻力;為車輛迎風(fēng)面積;為空氣阻力系數(shù);為空氣密度;為汽車車速(m/s);為加速阻力;為旋轉(zhuǎn)質(zhì)量換算系數(shù);為期望加速度。
聯(lián)立式(12)—(17)得到

圖4為根據(jù)dSPACE車輛動(dòng)力學(xué)模型ASM中發(fā)動(dòng)機(jī)脈譜圖得到的發(fā)動(dòng)機(jī)逆脈譜圖。對(duì)應(yīng)發(fā)動(dòng)機(jī)轉(zhuǎn)速和轉(zhuǎn)矩,可以采用二維查表法確定相應(yīng)的節(jié)氣門開度:


圖4 發(fā)動(dòng)機(jī)逆動(dòng)力學(xué)模型
3.2 制動(dòng)控制
進(jìn)入制動(dòng)模式后,通過(guò)上位控制器計(jì)算得出的期望加速度求解所需制動(dòng)力,然后由制動(dòng)系統(tǒng)逆模型得到期望制動(dòng)壓力(單位bar),進(jìn)而控制制動(dòng)系統(tǒng)動(dòng)作。
制動(dòng)和驅(qū)動(dòng)是分開動(dòng)作的,此時(shí)節(jié)氣門開度為0,驅(qū)動(dòng)力為0,聯(lián)立式(12)—(17)得到

當(dāng)制動(dòng)力不超出地面附著力時(shí),可以認(rèn)為制動(dòng)力和制動(dòng)壓力近似呈線性關(guān)系,表示為

式中,為一系數(shù),由式(20)(21)(22)得到

經(jīng)過(guò)仿真試驗(yàn),確定系數(shù)=220.34。
4 硬件在環(huán)測(cè)試
試驗(yàn)選用dSPACE公司的SCALEXIO實(shí)時(shí)仿真模擬器,dSPACE自帶高自由度車輛動(dòng)力學(xué)模型ASM。本文選取自適應(yīng)巡航控制器ECU主控芯片型號(hào)為英飛凌SAK-TC234LP-32F200F AB。
圖5為硬件在環(huán)仿真測(cè)試平臺(tái)結(jié)構(gòu),采用PreScan搭建ACC典型測(cè)試場(chǎng)景,聯(lián)合Simulink、dSPACE進(jìn)行ECU硬件在環(huán)仿真測(cè)試。

圖5 硬件在環(huán)仿真測(cè)試平臺(tái)結(jié)構(gòu)
在PreScan中創(chuàng)建測(cè)試工況,分別設(shè)計(jì)了目標(biāo)車輛跟隨、目標(biāo)車輛切出、旁車低速切入三個(gè)試驗(yàn)。
4.1 目標(biāo)車輛跟隨試驗(yàn)
自車選用ASM中MidSizeCar,試驗(yàn)選取平直道路,設(shè)置自車初始位置(質(zhì)心位置)在原點(diǎn)處,初始車速為 20 m/s,定速巡航車速設(shè)置為30 m/s。前車初始位置(質(zhì)心位置)在50 m處,初始車速為25 m/s,勻速行駛900 m后以-1 m/s的減速度減速至 15 m/s,然后勻速行駛至仿真結(jié)束。試驗(yàn)1結(jié)果如圖6—圖8所示。
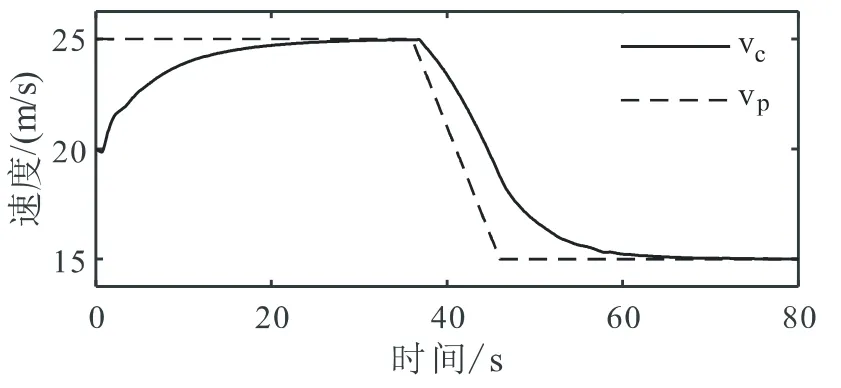
圖6 試驗(yàn)1車速變化曲線

圖7 試驗(yàn)1相對(duì)距離曲線
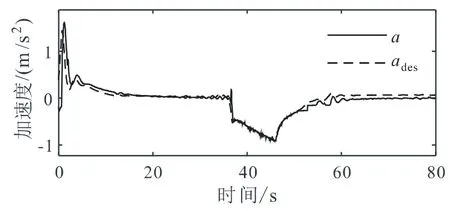
圖8 試驗(yàn)1加速度變化曲線
圖6可見,試驗(yàn)一開始自車識(shí)別出目標(biāo)車輛,進(jìn)入距離控制模式,自車車速逐漸從20 m/s提高到25 m/s。當(dāng)前車突然以-1 m/s的加速度制動(dòng)到15 m/s時(shí),自車也能及時(shí)制動(dòng),速度跟隨到15 m/s。
圖7可見,加速跟隨前車階段,相對(duì)距離(自車最前端到前車尾部)逐漸從45.5 m穩(wěn)定到80 m;前車減速后,將距離控制在35 m。
圖8可見,在試驗(yàn)1工況下自車實(shí)際加速度變化趨勢(shì)與理想加速度變化趨勢(shì)基本相同,表明下位控制器具有較準(zhǔn)確的執(zhí)行能力。
4.2 目標(biāo)車輛切出試驗(yàn)
自車初始位置在原點(diǎn)處,初始車速為15 m/s,定速巡航車速設(shè)置為30 m/s。前車初始位置在50 m處,初始車速為25 m/s,勻速行駛至600 m處,換道切出。試驗(yàn)2結(jié)果如圖9—圖11所示。
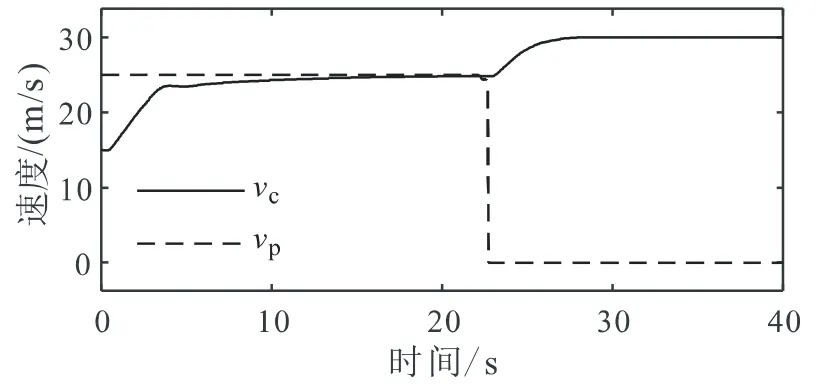
圖9 試驗(yàn)2車速變化曲線

圖10 試驗(yàn)2相對(duì)距離曲線

圖11 試驗(yàn)2加速度變化曲線
由圖 9可知,自車一開始鎖定目標(biāo)車輛,進(jìn)入距離控制模式跟隨前車,車速由15 m/s逐漸提高至25 m/s。前車行駛至600 m處換道切出,此時(shí)自車?yán)走_(dá)檢測(cè)不到目標(biāo)車輛,模式切換至速度控制,車速逐漸提高到設(shè)定的巡航車速30 m/s。
由圖10可知,加速跟隨前車階段,相對(duì)距離逐漸從45.5 m提高至80 m,前車變道切出后相對(duì)距離跳變?yōu)?,此時(shí)進(jìn)入速度控制模式。
圖11為加速度變化曲線。在試驗(yàn)2工況下自車實(shí)際加速度變化與理想加速度變化趨勢(shì)基本相同。
4.3 旁車低速切入試驗(yàn)
設(shè)置自車初始位置在原點(diǎn)處,初始車速為20 m/s,定速巡航車速設(shè)置為30m/s。前車 1初始位置在80 m處,初始車速為28 m/s,前車1保持勻速行駛,在530 m處,前車2以15 m/s的車速緊急切入自車和前車1之間。試驗(yàn) 3結(jié)果如圖12—圖14所示。
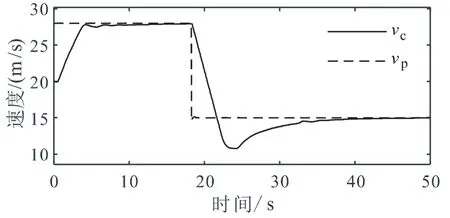
圖12 試驗(yàn)3車速變化曲線

圖13 試驗(yàn)3相對(duì)距離曲線
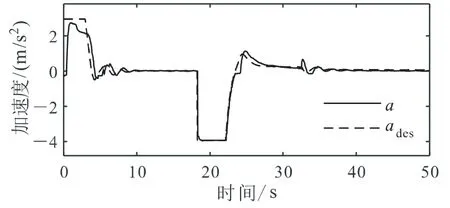
圖14 試驗(yàn)3加速度變化曲線
由圖12可知,自車一開始進(jìn)入距離控制模式,車速跟隨前車1至28 m/s,在530 m處,前車2緊急切入自車和前車1之間,自車將前車 2鎖定為新的目標(biāo)車輛,進(jìn)入距離控制模式,減速跟隨前車2至11 m/s后加速跟隨,最終自車車速穩(wěn)定在 15 m/s。
由圖13可知,加速跟隨階段,相對(duì)距離從75.5 m逐漸穩(wěn)定至95 m,前車2切入自車車道后相對(duì)距離跳變?yōu)?2 m,采取制動(dòng)后由于前車2車速小于自車車速,相對(duì)距離進(jìn)一步縮小,自車減速至小于目標(biāo)車輛車速后,相對(duì)距離逐漸增大,最終穩(wěn)定在35 m。
由圖14可知,在試驗(yàn)3工況下自車實(shí)際加速度變化趨勢(shì)與理想加速度變化趨勢(shì)基本相同。
5 結(jié)論
硬件在環(huán)仿真測(cè)試結(jié)果表明,當(dāng)目標(biāo)車輛速度變化、前車切出、旁車道車輛低速切入時(shí),設(shè)計(jì)的基于最優(yōu)控制的ACC系統(tǒng)可以適應(yīng)多變的交通場(chǎng)景,及時(shí)做出正確的決策,在距離控制模式下可以保證安全跟車距離的同時(shí)穩(wěn)定跟隨前車,在速度控制模式下可以平穩(wěn)地跟隨設(shè)定巡航車速行駛。
