基于自抗擾控制器的永磁同步電機矢量控制
2022-03-25 22:33:49岳偉高思云劉大維
青島大學學報(工程技術版) 2022年1期
關鍵詞:永磁同步電機
岳偉 高思云 劉大維



文章編號: 10069798(2022)01009706; DOI: 10.13306/j.10069798.2022.01.015
摘要:? 針對傳統的三相永磁同步電機存在的矢量控制方式啟動電流和超調量過大及抗干擾性不強等問題,本文設計了一種基于自抗擾控制器的三相永磁同步電機矢量控制系統。在傳統雙閉環PI控制系統結構的基礎上,在Matlab/Simulink軟件中,分別采用PI控制器和自抗擾控制器搭建轉速環三相永磁同步電機矢量控制系統模型,為了對比控制效果,將兩種控制器置于相同電機參數和相同仿真條件下,通過仿真得到兩種控制方法下的電機轉速、電磁轉矩和電流響應。仿真結果表明,基于自抗擾控制器的三相永磁同步電機矢量控制系統,控制性能更優,具有更小的超調量、更好的動態性和更強的魯棒性。該研究為永磁同步電機的矢量控制提供了理論參考。
關鍵詞:? 永磁同步電機; 矢量控制; PI控制;自抗擾控制器; Simulink仿真
中圖分類號: TM351文獻標識碼: A
近年來,永磁同步電機(permanent magnet synchronous machine,PMSM)由于體積小、低損耗、響應速度快、能量密度高等性能優勢,廣泛應用于電動車、冰箱、空調壓縮機以及其它高精尖產業[1]。PMSM是非線性控制系統,其參數多具時變性,多變量之間耦合性強[27]。為了實現對PMSM的控制,需要采用磁場定向的矢量控制方法對PMSM進行解耦。在工業應用中,PMSM矢量控制的轉速環和電流環廣泛采用PI控制器。傳統PI控制器模型簡單,可靠性高,魯棒性好,能抵抗一定程度上的微量擾動,但其參數固定不變,因此基于PI控制器對環境變化的自適應性能較差,且控制參數往往整定不良,難以對突加擾動迅速做出動態響應,對微小的超調具有更強的抗干擾性 [8]。為了使系統具有更好的控制效果,出現了各種非線性控制方法,如魯棒控制[9]、滑模控制[10]、神經網絡方法[1112]及模糊控制 [13]等。自抗擾控制技術是把自身不確定的系統模型(內擾)和未知外擾進行估計,并給予實時反饋補償,實現自抗擾的一種實用的非線性控制方法[14]。與傳統的PI控制相比,自抗擾控制不依賴控制對象,具有更高的響應速度,更優的抑制噪聲干擾等優勢[15]。近年來,自抗擾控制器(active disturbance rejection controller,ADRC)在工程方面的應用越來越廣泛,并在電力電子系統、伺服系統、勵磁控制、混沌系統和抗震減震系統等領域得到理論及實際方面的研究與應用[16]。茅靖峰等人[14]將ADRC技術應用在永磁直線同步電機(permanent magnet linear synchronous machine, PMLSM)直驅系統的位置控制策略中;廖自力等人[17]則是將一階ADRC技術進行簡化,并應用在PMSM無位置傳感器控制系統中。基于此,本文介紹了三相PMSM數學模型和基于一階ADRC系統數學模型的自抗擾控制器,在傳統雙閉環PI控制系統結構的基礎上,采用ADRC控制器設計了轉速環三相PMSM矢量控制系統,并在Matlab/Simulink仿真軟件中搭建了兩種控制方法下的系統模型,仿真驗證了基于ADRC技術的PMSM矢量控制系統,其控制性能更優。本研究在理論及實際應用方面具有一定的參考價值。
1永磁同步電機數學模型
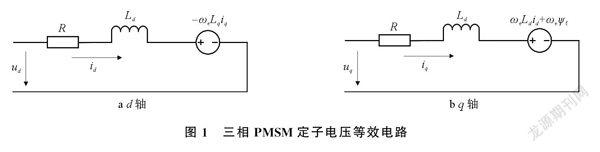
永磁同步電機是高階、非線性、強耦合的復雜系統,在兩相旋轉坐標系下,采用雙軸理論建立數學模型[18]。永磁體基波勵磁磁場的磁極軸線的直軸為d 軸,交軸為q軸,q軸逆時針超前d軸90°。三相PMSM的電壓等效電路如圖1所示。
在同步旋轉坐標系下,建立三相PMSM數學模型,并進行如下假設:
1)忽略電動機鐵心飽和。
2)不計電動機渦流和磁滯損耗。
3)定子三相電流產生的空間磁勢及永磁轉子的磁通分布為正弦波形。
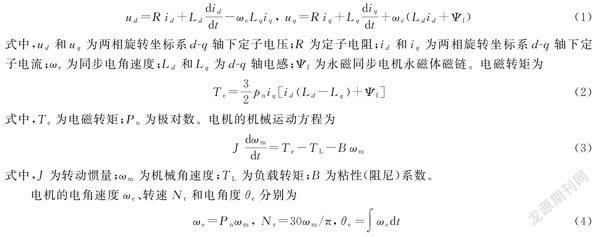
在兩相同步旋轉坐標系下,三相PMSM的電壓方程[18]為
式中,ud和uq為兩相旋轉坐標系dq軸下定子電壓;R為定子電阻;id和iq為兩相旋轉坐標系dq軸下定子電流;ωe為同步電角速度;Ld和Lq為dq軸電感;Ψf為永磁同步電機永磁體磁鏈。電磁轉矩為
式中,Te為電磁轉矩;Pn為極對數。電機的機械運動方程為
式中,J為轉動慣量;ωm為機械角速度;TL為負載轉矩;B為粘性(阻尼)系數。
電機的電角速度ωe、轉速Nr和電角度θe分別為
2自抗擾控制器
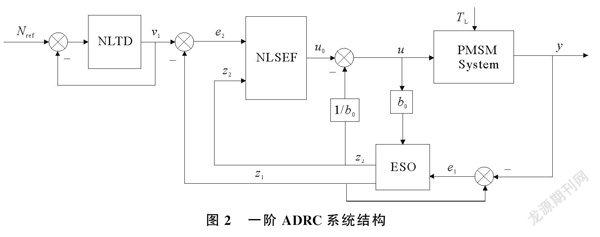
在PMSM矢量控制系統中,為了使電機的實際轉速Nr在受到負載擾動后快速準確地跟隨參考轉速Nref,轉速控制器需要選擇合適控制律。自抗擾控制技術在PI控制技術基礎上,具有更好的非線性效應。自抗擾控制技術不受控制對象數學模型的限制,根據系統實時輸出輸入信息實時觀測擾動,并將擾動信息與實際值一起反饋給系統進行控制。自抗擾控制器主要由非線性跟蹤微分器(nonlinear tracking differentiator,NLTD)、擴張狀態觀測器(extended state observer,ESO)和非線性狀態誤差反饋律(nonlinear state error feedback law,NLSEF)三部分構成。NLTD的作用是為實現快速無超調地跟蹤系統參考輸入信號而引入短暫的過渡過程,并提取品質較好的微分信號;ESO是自抗擾技術的核心,它不僅可以根據系統輸出和輸入的信息對內外擾動進行實時觀測(其中,自抗擾控制器將系統模型自身的不確定性當作內擾,外界擾動當作外擾,二者共同構成系統的“總擾動”,由擴張狀態觀測器進行觀測),同時還能對系統的擾動進行估計,將觀測值補償被控對象的控制信號;NLSEF將NLTD和ESO輸出的狀態變量之間的估計誤差進行非線性組合,并與ESO的擾動補償量一起構成控制量,使控制系統性能得到提升[19]。一階ADRC [17] 系統方程如下:
NLTD方程為
ESO方程為
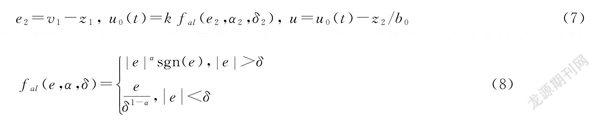
NLSEF方程為
式中,e0、e1、e2分別為誤差信號;Nref為NLTD輸入信號;v1為轉速Nr的跟蹤信號;r0為速度因子;y為被控對象的輸出信號;z1為y的跟蹤信號;z2為擾動觀測值;α0、α1、α2為跟蹤因子;δ0、δ1、δ2為濾波因子;β1、β2為 ESO輸出誤差校正增益;b0為補償因子;k為調節器增益;fal為最優控制函數,其表達式為
式中,sgn為符號函數;e為誤差信號;α為跟蹤因子;δ為濾波因子。根據式(6)~式(8)可得,一階ADRC系統結構如圖2所示。
3基于ADRC的三相PMSM矢量控制
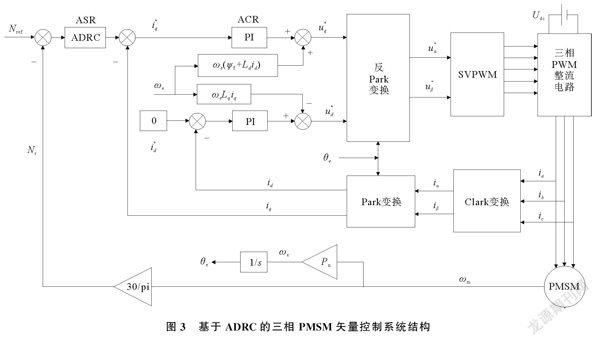
矢量控制本質上是永磁同步電機對電流id與iq的控制,根據速度調節和性能要求的不同,永磁同步電機的矢量控制策略主要有i*d=0控制、最大電磁轉矩/電流控制、弱磁控制和最大功率控制等,其中,i*d=0的矢量控制方法控制簡單,調速范圍寬,且轉矩性能好。針對內置式PMSM,本文采用直軸參考電流i*d=0的矢量控制策略,根據兩軸旋轉坐標系下三相PMSM數學模型是基于PI控制的矢量控制系統[20],將該系統中轉速環的PI控制器換成自抗擾控制器,從而得到基于ADRC的三相PMSM矢量控制系統。基于ADRC的三相PMSM矢量控制系統結構如圖3所示。系統主要包括轉速環(ASR)和電流環(ACR)雙閉環控制器、坐標變換模塊、SVPWM模塊、逆變器和永磁同步電機等結構。
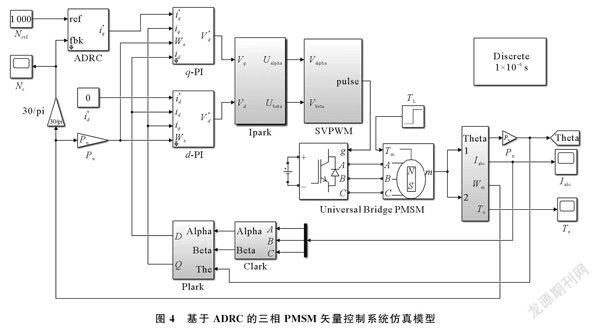
在Matlab/Simulink仿真環境中,采用PI控制器和自抗擾控制器,分別搭建轉速環三相PMSM矢量控制系統模型,基于ADRC的三相PMSM矢量控制系統仿真模型如圖4所示,自抗擾控制器仿真模型如圖5所示。
4仿真實驗分析
通過調整和優化控制,自抗擾控制器NLTD的參數α0=095,δ0=001,r0=10 000;ESO中的參數α1= 095,δ1= 001,β1=80000,β2=0;NLSEF中的參數α2=008,δ2= 001,b0=10000,k=10。基于雙閉環PI控制的三相PMSM矢量控制系統中,轉速環和電流環的PI控制器參數可由文獻[20]所得。
為了對比三相PMSM矢量控制在兩種轉速控制方法下的控制效果,將上述兩種控制器置于相同仿真條件下。當直流側電壓Udc=311 V,PWM開關頻率fpwm =10 kHz,采樣周期Ts=10 μs,參考轉速Nref=1 000 r/min,t=02 s時,負載轉矩TL=10 N·m,仿真算法采用變步ode23tb算法,相對誤差為0000 1,仿真時間為04 s。永磁同步電機參數如表1所示。
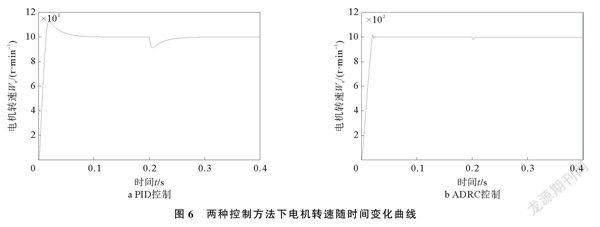
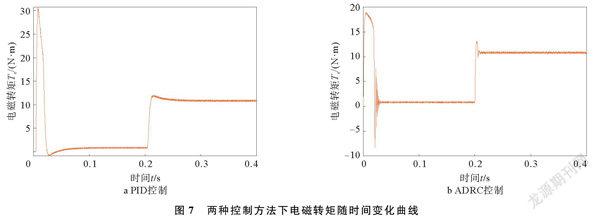
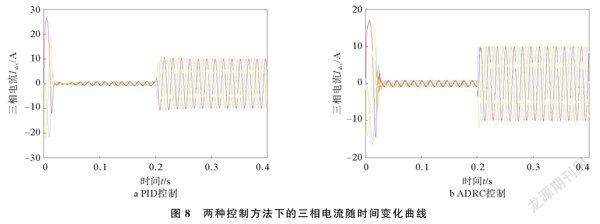
基于上述仿真條件及參數設置,通過仿真可以得到,兩種控制方法下的電機轉速響應、電磁轉矩和電流響應。在兩種控制方法下電機轉速隨時間變化曲線如圖6所示,電磁轉矩隨時間變化曲線如圖7所示,三相電流隨時間變化曲線如圖8所示。
由圖6可以看出,兩種控制方法下的電機轉速上升時間相差不大,采用PI控制的電機調節時間約為006 s,而采用ADRC控制的電機調節時間為002 s,減少了004 s,動態性更好。采用PI控制系統的電機轉速超調量約為13%,而采用ADRC的電機轉速超調量約為2%,超調量更小;在02 s添加負載后,采用PI控制的電機轉速下降近10%,而采用ADRC的電機轉速下降約為02%,抗干擾性更好;采用PI控制的電機轉速恢復時間約12 s,而采用ADRC的電機轉速恢復時間約006 s,用時更短。
由圖7可以看出,采用PI控制系統中PMSM的啟動電磁轉矩峰值約為31 N·m,而采用ADRC的啟動電磁轉矩峰值約18 N·m,電磁轉矩更小。由圖8可以看出,采用PI控制的三相電流啟動最值約為27 A,而ADRC的三相電流啟動最值約為17 A,啟動電流更小。由圖6~圖8可以看出,與傳統PI 控制相比,采用ADRC的三相PMSM矢量控制系統具有更少的調節時間、更小的起動轉矩和啟動電流、更小的超調量和更強的抗干擾能力。
5結束語
本文基于傳統PI控制模型設計搭建了轉速環采用ADRC控制器的三相PMSM矢量控制系統仿真模型,在相同電機參數、相同仿真條件下對PI和ADRC控制器參數進行調整和優化,對基于兩種控制方法下的三相PMSM矢量控制系統仿真結果進行了比較分析。結果表明,基于PI控制的三相PMSM矢量控制系統具有控制模型簡單、容易調整參數的優點,但基于ADRC的三相PMSM矢量控制系統相較基于PI控制的三相PMSM矢量控制系統可得到更好的控制效果,更小的超調量、啟動轉矩和啟動電流,更好的動態性和魯棒性,適用于高精度、高性能電機控制策略,該研究具有一定的應用價值。下一步的研究重點是在保證一定控制效果的基礎上,簡化ADRC控制器控制參數以適應更多應用場景需求。
參考文獻:
[1]張書橋. 電動汽車發展現狀及前景分析[J]. 電氣時代, 2019(9): 710.
[2]于淼. 基于模糊PID控制的永磁同步電機控制系統研究[D]. 長春: 長春工業大學, 2019.
[3]劉洋. 基于智能優化的模糊PID永磁同步電機控制系統研究[D]. 上海: 上海電機學院, 2019.
[4]HUANG Y, YASUNOBU S. A general practical design method for fuzzy PID control from conventional PID control[C]∥The Ninth IEEE International Conference on Fuzzy Systems. San Antonio IEEE, 2000.
[5]戴嘉庚. 基于模糊PID永磁同步電機矢量控制研究[J]. 內燃機與配件, 2020(4): 7072.
[6]王福杰. 基于模糊PID控制和BP神經網絡PID控制的永磁同步電機調速方案比較研究[J]. 微電機, 2020, 53(6): 103107.
[7]錢榮榮, 駱敏舟, 趙江海. 永磁同步電動機新型自適應滑模控制[J]. 控制理論與應用, 2013, 30(11): 14141421.
[8]韓京清. 從PID技術到“自抗擾控制”技術[J]. 控制工程, 2002, 9(3): 1318.
[9]GHAFARIKASHANI A R, FAIZ J, YAZDANPANAH M J. Integration of nonlinear H∞ and sliding mode control techniques for motion control of a permanent magnet synchronous motor[J]. IET Electric Power Applications, 2010, 4(4): 267280.
[10]莫理莉. 基于滑模變結構的表面式永磁同步電機速度與位置控制[D]. 廣州: 華南理工大學, 2020.
[11]黨選舉, 徐小平, 于曉明, 等. 永磁同步直線電機的小波神經網絡控制[J]. 電機與控制學報, 2013, 17(1): 4350.
[12]SHARMA D, BHAT A H. Neural network controlled space vector PWM for a high power factor converter under perturbed conditions[J]. IETE Journal of Research,? 2021(1): 19.
[13]QUYNH N V. The fuzzy PI controller for PMSM′s speed to track the standard model[J]. Mathematical Problems in Engineering, 2020(7): 120.
[14]茅靖峰, 顧菊平, 吳愛華, 等. 基于自抗擾控制器的PMLSM直驅系統位置控制[J]. 微電機, 2014, 47(6): 4548.
[15]王帥. 基于自抗擾技術的永磁同步電機控制系統研究[D]. 哈爾濱: 哈爾濱理工大學, 2020.
[16]劉清. 基于自抗擾控制器的永磁同步電機伺服系統控制策略的研究及實現[D]. 天津: 天津大學, 2011.
[17]廖自力, 趙其進, 劉春光. 基于自抗擾技術的PMSM無位置傳感器優化控制[J]. 微電機, 2018: 51(7): 4447, 53.
[18]張文娟, 黃守道, 高劍, 等. 壓縮機用永磁同步電機轉速脈動的抑制[J]. 控制理論與應用, 2013, 30(11): 14221428.
[19]崔曉光. 基于自抗擾控制技術的永磁同步電機速度控制研究[D]. 濟南: 山東大學, 2013.
[20]袁雷, 胡冰新, 魏克銀, 等. 現代永磁同步電機控制原理及MATLAB仿真[M]. 北京: 北京航空航天大學出版社, 2016.
Vector Control of PMSM Based on Active Disturbance Rejection ControlYUE Wei GAO Siyun LIU Dawei
(1. College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China;
2. Hisense(Shandong)Air Conditioning Co, Ltd, Qingdao 266736, China)Abstract:? Aiming at the problems of excessive starting current, excessive overshoot and weak antiinterference of threephase PMSM in traditional vector control, a threephase PMSM vector control system based on ADRC is designed in this paper. Upon the traditional double closedloop PI control system structure, the threephase PMSM vector control system models with PI and ADRC controller in speed loop are built in Matlab/Simulink. In order to analyse the effect of two methods, the two controllers are placed under the same motor parameters and the same simulation conditions. By simulation, the motor speed response, electromagnetic torque and current response under the two methods are obtained. The simulation results show that the threephase PMSM vector control system based on ADRC has better control performance, smaller overshoot, better dynamics and stronger robustness. This research provides a reference for vector control of permanent magnet synchronous motor.
Key words: permanent magnet synchronous motor; vector control; PI control; ADRC; simulation by Simulink
收稿日期: 20210816; 修回日期: 20211102
基金項目:? 山東省重點研發計劃資助項目(2017CXGC0510)
作者簡介:? 岳偉(1995),男,碩士研究生,主要研究方向為永磁同步電機控制技術。
通信作者:? 劉大維(1957),男,博士,教授,碩士生導師,主要研究方向為汽車動態仿真與控制技術、地面車輛系統與控制技術。Email:qdldw@163.com
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
