模糊PID控制的同步發電機勵磁控制方法
2022-03-24 03:07:20關圣凡烏夢悅
中國新技術新產品 2022年24期
王 徽 關圣凡 烏夢悅
(遼寧工程技術大學,遼寧 葫蘆島 125105)
0 引言
同步發電機具有體積小、成本低以及發電能力強等優點,已經逐漸代替傳統發電機,并且已經得到了批量化生產。雖然同步發電機具有多種優點,但是也具有一定的局限性,在運行過程中,由于受各種干擾的影響,因此發電機電磁功率逐漸下降,轉子電流出現異常波動,定子電壓逐漸下降,轉子產生較大的搖擺,形成勵磁效應。如果不能得到有效控制,同步發電機的穩定性就會受到影響(發電效率降低,嚴重情況下會引發故障,縮短同步發電機的使用壽命),因此需要采取有效的手段對發電機勵磁進行控制。由于國內對同步發電機勵磁控制問題的研究起步較晚,因此現有的控制技術和理論還不夠成熟,控制水平與國外相比還存在較大的差距。雖然勵磁控制問題受到重視,相關學者和專家開展了一系列研究,提出了一些控制思路和方法,但是現行的方法控制效果仍有待提升。在實際應用中,同步發電機轉子電流依然會出現異常波動,且定子電壓回歸穩態時間比較長,控制效果不佳,因此該文提出模糊PID控制的同步發電機勵磁控制方法。
1 建立同步發電機等效模型
對同步發電機進行等效分析,建立發電機數學模型。由于同步發電機陰極、陽極磁場之間無直接耦合關系,但是發電機轉子與繞組控制、功率與轉子之間存在直接的耦合關系,因此在不考慮發電機陰極、陽極磁場之間的耦合關系下,發電機磁鏈電路狀態等效為2個部分,第一部分如公式(1)所示。
式中:Ve2為發電機轉子的繞組控制電壓;h為發電機極對數;qc2為發電機控制繞組的電氣角頻率;k2為發電機控制繞組的負載電阻;qe為發電機轉子繞組的電氣角頻率;Ae2為發電機轉子繞組控制部分的磁鏈;Vc2為發電機控制繞組的電壓;Tc2為發電機控制繞組的電阻;Yc2為發電機控制繞組的電流;Ac2為發電機控制繞組控制部分的磁鏈;Hαe2為發電機轉子繞組的漏感;Hn2為發電機轉子繞組的互感;Ye為發電機轉子繞組的電流;Hαc2為發電機轉子繞組控制部分的漏感[1]。
在兩相旋轉坐標系中,功率和轉子耦合電路如公式(2)所示。
式中:Ve1為發電機功率繞組的控制電壓;Te1為發電機功率繞組的電阻;Ye1為發電機功率繞組的電流;qe1為發電機功率繞組的電氣角頻率;Ae1為發電機功率繞組的磁鏈;Vc1為發電機轉子繞組的功率電氣角頻率;Tc為發電機轉子繞組的電阻;Yc為發電機轉子繞組的電流;qc為發電機轉子繞組的電氣角頻率;Ac1為發電機轉子繞組的功率磁鏈;Hαe1為發電機功率繞組控制部分的漏感;Hn1為發電機功率繞組的互感;Hαc1為發電機功率繞組控制部分的互感[2]。
將同步發電機定子電壓和轉子電流作為數學模型的輸入變量,那么發電機在兩相旋轉坐標系中的狀態等效數學模型如公式(3)所示。
式中:p為微分算子;A為在兩相旋轉坐標系中發電機轉子的磁鏈分量,即轉子繞組功率磁鏈、轉子繞組控制部分磁鏈的總和;Y為在兩相旋轉坐標系中發電機轉子的電流,即轉子繞組電流、控制繞組電流的總和;V為在兩相旋轉坐標系中發電機定子的電壓[3]。
利用以上數學模型描述同步發電機轉子的磁鏈狀態,為后續執行控制策略奠定基礎。
2 建立模糊規則
由于該文采用模糊PID控制技術對發電機勵磁進行控制,因此在勵磁控制前,應建立符合與上述同步發電機等效數學模型對應的模糊規則。先建立模糊語集,根據實際需求,用正大、正中、正小、負小、負中以及負大描述同步發電機勵磁偏差程度,建立模糊語集,如公式(4)所示。
式中:S為模糊語集;BN為正大;OK為正中;ER為正小;KM為負小;PK為負中;HN為負大[4]。
利用模糊語集中模糊控制子集描述同步發電機轉子電流、定子電壓的偏差程度,在此基礎上利用模糊PID矩陣建立模糊PID控制規則,見表1。
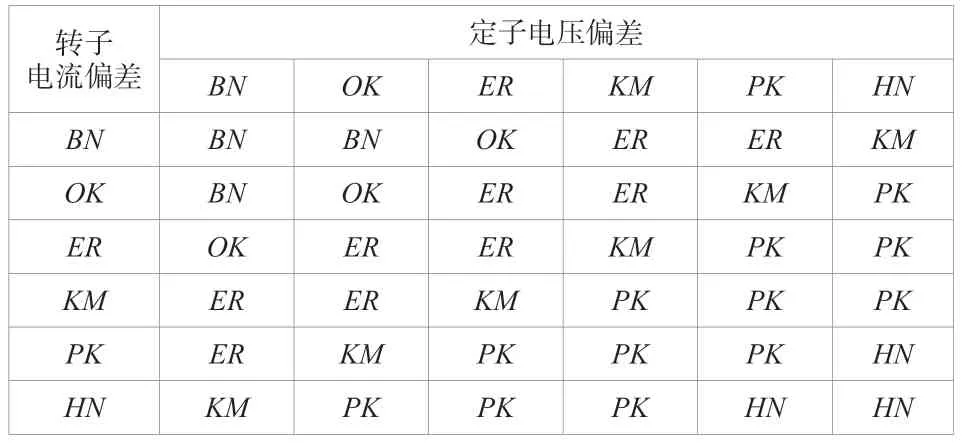
表1 模糊PID控制規則
由表1可知,同步發電機勵磁偏差由發電機轉子電流偏差和定子電壓偏差2個指標確定[5]。將2個狀態變量輸入模糊PID矩陣就可以輸出相應的控制規則,為后續同步發電機勵磁模糊PID控制提供依據。
3 發電機勵磁模糊PID控制
利用模糊PID控制器對發電機勵磁進行控制,其控制步驟如下。
步驟一:確定發電機勵磁偏差[6]。根據發電機初始轉子電流和定子電壓確定2個狀態量偏差,利用賦權法確定發電機勵磁偏差模糊量,如公式(5)所示。
式中:μ為發電機勵磁偏差模糊量;w1為發電機轉子電流的偏差權重系數;Y1為發電機轉子的初始電流值;Y2為當前發電機轉子的電流值;w2為定子電壓的偏差權重系數;V1為發電機定子的初始電壓值;V2為當前發電機定子的電壓值。
步驟二:確定模糊PID控制策略。將公式(5)中的轉子電流偏差、定子電壓偏差輸入模糊規則,得到發電機勵磁補償模糊子集[7]。利用PID控制算法,將發電機勵磁補償模糊子集、發電機勵磁偏差模糊量作為輸入量,計算控制策略如公式(6)所示。
式中:u(t)為同步發電機模糊PID控制策略;K為模糊PID控制器參數,即比例控制系數;e(t)為PID控制器輸入量,即發電機勵磁補償模糊子集;δ、Td分別為積分時間常數、微分時間常數,正常情況δ=0~1,Td=0.5~1.5。
將輸入量輸入公式(6),輸出模糊PID控制策略。
步驟三:發電機勵磁控制[8]。根據實際情況設定PID控制器參數,將u(t)代入上文建立的發電機數學模型,對發電機勵磁進行補償處理,以實現基于模糊PID控制的發電機勵磁控制功能。
根據上述3個步驟可以實現發電機勵磁模糊PID控制功能。
4 試驗論證
為了檢驗該文提出的基于模糊PID控制的同步發電機勵磁控制思路的可行性和可靠性,選擇某同步發電機為試驗對象,該發電機轉子結構為繞線轉子,座號為200,額定功率為25.45 kW,同步轉速為730 r/min,定子槽數為68,轉子槽數為42,控制繞組極對數為2對,控制繞組額定電壓為400 V,功率繞組極對數為3對,功率繞組額定電壓為220 V。利用該文提出的方法對該同步發電機勵磁進行控制,并選擇2種傳統方法作為對比,2種傳統方法分別為基于改進量子遺傳算法和基于偽廣義Hanilton理論,分別用傳統方法一和傳統方法二表示。在試驗中,將該同步發電機定子電阻設定為2.50 Ω,定子電感設定為0.01 H,定子繞組間互感設定為0.36 H,轉子繞組間互感設定為0.25 H,轉子電阻設定為2.65 Ω,轉子電感設定為0.01 H,令同步發電機正常運行。準備型號為HIDFAHA5F8的模糊PID控制器,采用并聯的方式接入同步發電機電源總線,作為模糊控制策略的執行單元。同步發電機轉子電流的波形情況可以反映發電機勵磁的控制效果。因此,根據試驗數據繪制不同控制方法的發電機轉子的電流波形圖(如圖1所示)。
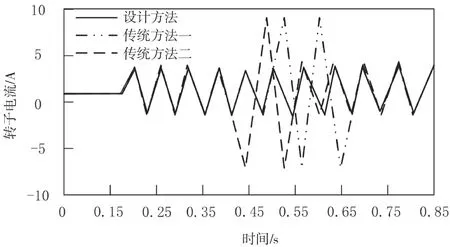
圖1 不同控制方法的發電機轉子的電流波形圖
由圖1可知,當使用該文提出的方法時,同步發電機轉子電流波動幅度較小,且在運行過程中沒有出現電流波形突變的情況,運行比較穩定,說明同步發電機勵磁得到了有效控制。當使用2種傳統方法時,同步發電機轉子的電流分別在0.45 s、0.51 s時出現異常波動,波動時間分別持續1.21 s、1.58 s,并且使用傳統方法一時同步發電機電流異常波動2次,說明該文提出的方法具有良好的勵磁控制效果。
為了進一步驗證設計方法的適用性,以電壓對稱跌落深度為變量,以對稱跌落深度10%為基數,每次增加跌落10%,跌落持續時間為250 ms,直到跌落深度達到80%為止。在不同跌落深度下,對同步發電機勵磁進行控制,使用電子表格記錄同步發電機電壓回歸穩態時間,回歸穩態時間越短,說明控制方法的響應性能越高,控制效果越好,具體數據見表2。
由表2可知,當使用該文提出的方法時,同步發電機定子的電壓回歸穩態時間比較短,雖然時間會隨著電壓跌落深度的增加而不斷延長,但是增長比例較小,當電壓跌落深度達到80%時,定子電壓回歸穩態時間僅為0.39 s,可以將時間控制在1 s以內,說明設計方法響應性能良好。當使用2種傳統方法時,同步發電機定子的電壓回歸穩態時間相對較長,并且會隨著電壓跌落深度的增加而大幅度延長,當電壓跌落深度達到80%時,傳統方法一和傳統方法二的回歸穩態時間分別為6.14 s和6.33 s,比該文提出的方法長。由試驗結果可知,該文提出的方法的控制效果較好,更適用于同步發電機的勵磁控制任務。

表2 使用3種方法時發電機定子的電壓回歸穩態時間
為了進一步分析模糊PID控制的同步發電機勵磁控制方法的控制效果,結合實際工作中的情況,即考慮實際工作中存在各種各樣的干擾,因此,在該試驗中加入干擾信號,驗證設計的控制方法在存在干擾的情況下的工作效果。其中,在0.35 s加入干擾信號,以不同控制方法下發電機轉子電流波形的試驗為基礎,因為考慮在0.45 s時部分方法的同步發電機轉子電流波動出現異常,所以在0.35 s加入干擾信號,以達到工作干擾的目標。試驗過程仍以設計方法、傳統方法一和傳統方法二為對比方法,不同方法的發電機轉子的電流波形的試驗結果如圖2所示。

圖2 不同控制方法的發電機轉子電流波形圖
由圖2可知,在0.35 s加入干擾信號后,該文提出的方法的發電機轉子的電流波形未發生較大波動,發電機轉子的電流波形與圖1基本一致,說明在加入干擾信號后,該文提出的方法仍然可以有效控制同步發電機的勵磁,具備一定的抗干擾能力。但是與該文提出的方法相比,在0.35 s前,使用傳統方法一的發電機轉子的電流波形就出現了較大波動,但是在0.60 s左右發電機轉子電流波形的波動幅度開始減少,而在0.35 s加入干擾信號后,使用傳統方法二的發電機轉子的電流波形出現了較大波動,與圖1的發電機轉子的電流波形圖相比,波形提前出現了異常波動,由此可知,在加入干擾信號后,該文提出的方法的同步發電機勵磁控制效果最好,表明該文提出的方法在提高控制效果的同時,還具有較高的抗干擾能力。
5 結語
針對傳統方法存在的缺陷,該文提出了新的控制思路,有效解決了同步發電機轉子的電流異常波動問題,并對傳統方法進行了優化。該文對保證發電系統穩定運行、提高發電機勵磁控制水平具有重要的理論和現實意義。由于該文的研究時間有限,提出的方法尚未在實際中得到大量應用和操作,因此在某些方面可能存在不足,還須對該課題進行深入探究,從而為電力事業的發展提供有力的技術支撐。
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
兒童故事畫報(2019年5期)2019-05-26 14:26:14
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
Coco薇(2016年2期)2016-03-22 02:42:52
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電力工程技術(2014年1期)2014-03-20 14:19:06