無環(huán)境阻力的尖端生長(zhǎng)型軟體機(jī)器人研究綜述
2022-03-24 03:58:46岳龍旺魏青彪程豪劉景達(dá)金洪楊
科學(xué)技術(shù)與工程 2022年6期
岳龍旺, 魏青彪, 程豪, 劉景達(dá), 金洪楊
(河南工業(yè)大學(xué)機(jī)電工程學(xué)院, 鄭州 450001)
近年來,由于軟體機(jī)器人相對(duì)于傳統(tǒng)的剛體機(jī)器人,有安全的人機(jī)交互、柔順性強(qiáng)、可穿戴性及環(huán)境適應(yīng)性強(qiáng)等優(yōu)點(diǎn),人們對(duì)于軟體機(jī)器人的關(guān)注和研究越來越多[1]。
軟體機(jī)器人材質(zhì)軟的特性,使其有較好的柔順性,但面對(duì)某些場(chǎng)景,則需要軟體機(jī)器人“硬”起來,因此軟體機(jī)器人的變剛度控制是一個(gè)重點(diǎn);軟體機(jī)器人發(fā)生變形移動(dòng)時(shí),需要知道機(jī)器人的形狀以及在空間中的狀態(tài),判斷其是否碰到障礙物、是否處于安全的環(huán)境,針對(duì)軟體機(jī)器人的大范圍變形檢測(cè)也是軟體機(jī)器人面臨的難點(diǎn);剛體機(jī)器人運(yùn)動(dòng)時(shí),只能實(shí)現(xiàn)平移或者旋轉(zhuǎn),運(yùn)動(dòng)精度較高[2];而對(duì)于軟體機(jī)器人,實(shí)現(xiàn)精準(zhǔn)運(yùn)動(dòng)則較難。綜上所述,機(jī)器人的變剛度控制、大范圍變形檢測(cè)及精準(zhǔn)控制是軟體機(jī)器人存在的主要問題。
圍繞以上問題,現(xiàn)綜合相關(guān)文獻(xiàn),介紹無環(huán)境阻力的尖端生長(zhǎng)型軟體機(jī)器人的相關(guān)研究,并對(duì)未來的發(fā)展方向作出展望。
1 機(jī)器人靈感來源與基本原理
為了解決軟體機(jī)器人普遍存在的三個(gè)問題,學(xué)者們嘗試從自然界生物身上獲取靈感,設(shè)計(jì)出多種仿生機(jī)器人[3]。例如,Mao等[4]基于海星運(yùn)動(dòng)特性使用形狀記憶合金(shape memory alloy, SMA)[5]設(shè)計(jì)出的Multigiait軟體機(jī)器人,如圖1(a)所示;Calisti等[6]模仿章魚運(yùn)動(dòng)特性研制出的仿生章魚觸手,如圖1(b)所示;Katzschmann等[7]借鑒魚的運(yùn)動(dòng)特性設(shè)計(jì)的流體驅(qū)動(dòng)仿生魚,如圖1(c)所示;Villanueva等[8]仿照水母運(yùn)動(dòng)特性設(shè)計(jì)的Robojelly仿生水母軟體機(jī)器人,如圖1(d)所示;Onal等[9]模擬蛇的運(yùn)動(dòng)特性研制的仿蛇形軟體機(jī)器人,如圖1(e)所示;Fan等[10]基于青蛙運(yùn)動(dòng)特性設(shè)計(jì)的仿生青蛙,如圖1(f)所示。以上的研究都是基于動(dòng)物的運(yùn)動(dòng)特性進(jìn)行的,目前針對(duì)植物生長(zhǎng)的特性進(jìn)行的研究較少,本文中所講的尖端生長(zhǎng)型軟體機(jī)器人,其設(shè)計(jì)靈感來源于植物根莖的尖端生長(zhǎng)。
蔓藤從尖端開始生長(zhǎng),可以將身體延伸至百倍,并根據(jù)周邊環(huán)境控制生長(zhǎng)方向,所以尖端生長(zhǎng)型機(jī)器人也被稱作蔓藤機(jī)器人[11],如圖2所示。由于身體的延長(zhǎng)是從尖端開始,已延長(zhǎng)的身體在機(jī)器人前進(jìn)過程中相對(duì)于環(huán)境無阻力[12],如圖3所示,這是尖端生長(zhǎng)型軟體機(jī)器人獨(dú)有的優(yōu)點(diǎn)。
尖端生長(zhǎng)機(jī)器人基本原理如圖4所示,機(jī)器人的主體材料被纏繞在基座的卷軸上,通過基座內(nèi)部的壓力泵產(chǎn)生壓力,使得機(jī)器人工作腔內(nèi)部壓強(qiáng)升高,推動(dòng)機(jī)器人尖端外翻,主干不斷伸長(zhǎng),因此這種結(jié)構(gòu)的機(jī)器人也被稱為外翻機(jī)器人。當(dāng)機(jī)器人需要收回時(shí),通過電機(jī)帶動(dòng)卷軸反轉(zhuǎn),同時(shí)減小內(nèi)部壓強(qiáng),實(shí)現(xiàn)機(jī)器人的反向運(yùn)動(dòng)。
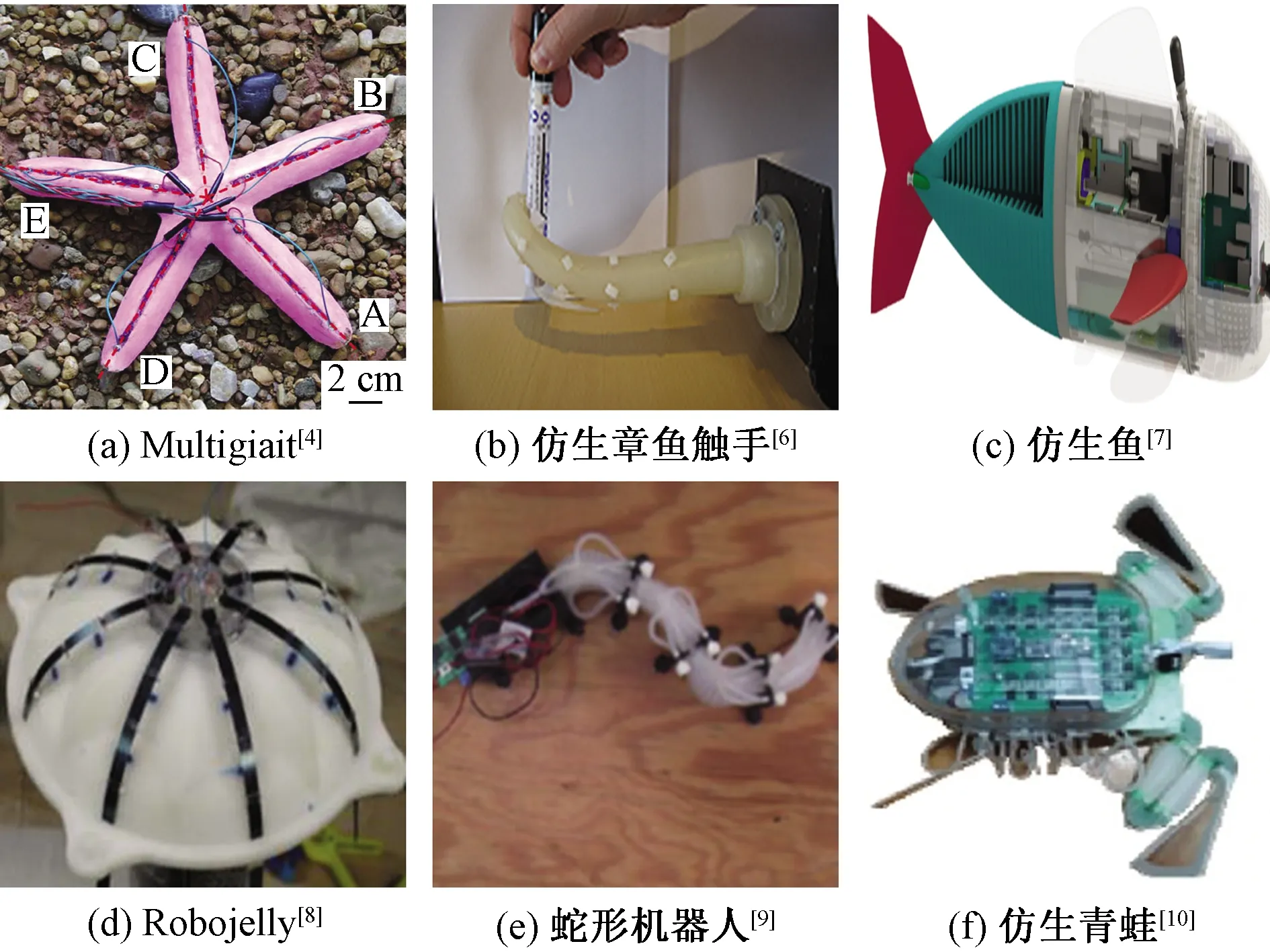
圖1 仿生軟體機(jī)器人Fig.1 Bionic soft robot
圖2 蔓藤生長(zhǎng)示意圖[11]Fig.2 Schematic diagram of vine growth[11]
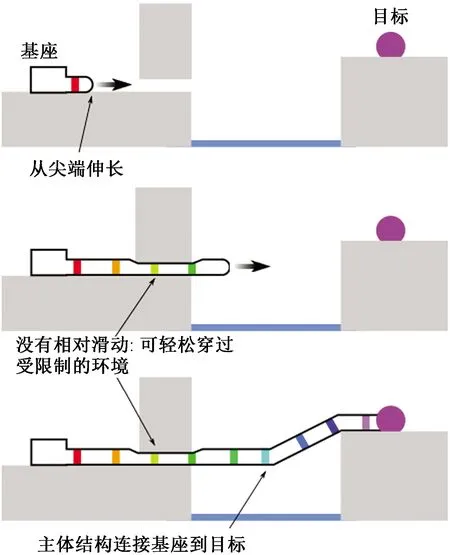
圖3 尖端生長(zhǎng)機(jī)器人運(yùn)動(dòng)示意圖[12]Fig.3 Schematic diagram of the movement of the tip-growth robot[12]
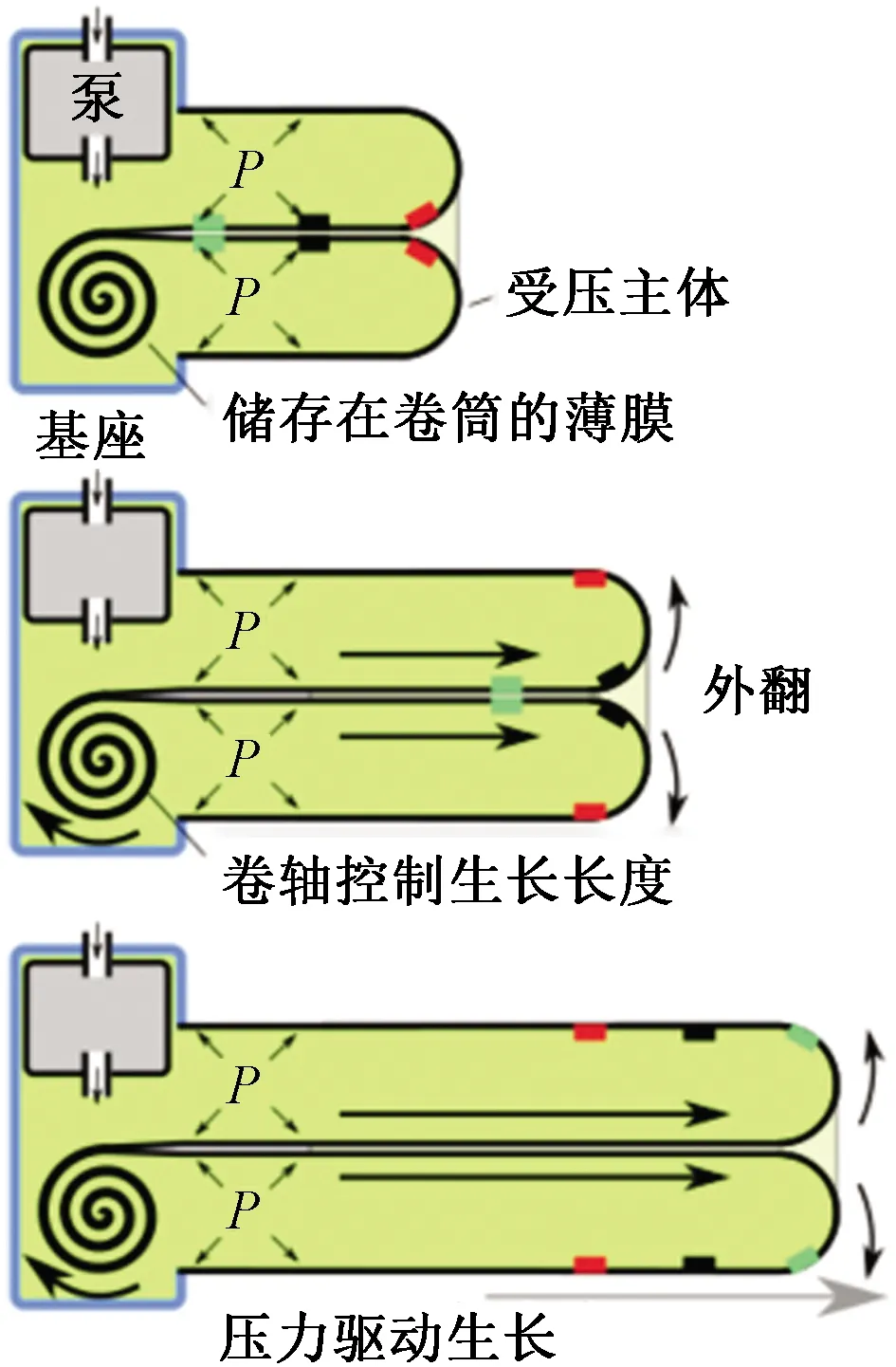
P為機(jī)器人主體內(nèi)壓強(qiáng)圖4 尖端生長(zhǎng)機(jī)器人原理圖[12]Fig.4 Schematic diagram oftip-growth robot[12]
2 面向變剛度控制的材料選擇
在面對(duì)不同的工作場(chǎng)景時(shí),軟體機(jī)器人可以通過變剛度控制實(shí)現(xiàn)不同的動(dòng)作。如在服務(wù)機(jī)器人領(lǐng)域,軟體機(jī)器人與人交互時(shí)需要較低的剛度,當(dāng)執(zhí)行某些命令時(shí)(如打開閥門、抓取東西等)則需要較高的剛度。實(shí)現(xiàn)軟體機(jī)器人的變剛度控制,可以大大提高機(jī)器人的工作效率。
目前,變剛度控制主要是基于拮抗作用和基于材料相變實(shí)現(xiàn)[13]。基于拮抗作用的變剛度可大致分為三種:機(jī)構(gòu)耦合變剛度[14-15]、顆粒阻塞變剛度[16-17]和層干擾變剛度[18],基于材料相變的變剛度可分為電磁變液[19-20]和低熔點(diǎn)合金[21]。
為了實(shí)現(xiàn)尖端生長(zhǎng)型軟體機(jī)器人的變剛度控制,大多數(shù)尖端生長(zhǎng)型機(jī)器人選擇柔軟、有彈性的材料作為主體,這樣可以使機(jī)器人具有多個(gè)自由度,改變機(jī)器人主體腔內(nèi)壓力時(shí)可實(shí)現(xiàn)變剛度,且運(yùn)動(dòng)靈活、易于收縮。Hawkes等[12]使用低密度聚乙烯薄膜作為機(jī)器人主體材料,這種材料重量輕、成本低、密封性好、彈性應(yīng)變小,但是剛度變化范圍有限,容易被鋒利物體刺破造成漏氣,且易產(chǎn)生疲勞,疲勞極限為翻轉(zhuǎn)10~50次,適合一次性或者少次性使用,如圖5(a)所示。帶涂層的織物有較強(qiáng)的耐久性,且可承受更高的負(fù)載壓力,為機(jī)器人提供更高的極限剛度。Coad等[22]使用帶防刮尼龍的熱塑性涂層織物作為機(jī)器人材料,提高了機(jī)器人的耐久性和剛度,但當(dāng)發(fā)生應(yīng)力集中時(shí),會(huì)導(dǎo)致熱塑層和織物層分離,產(chǎn)生漏氣,如圖5(b)所示。Putzu等[11]在機(jī)器人主體上使用了編織聚酯織物材料,這是一種低密度的碳聚合物,柔韌性好,但延展性較差,如圖5(c)所示。Naclerio等[23]制作了一種低遲滯、可折疊的織物人工肌肉,并將其應(yīng)用到尖端生長(zhǎng)機(jī)器人上,可以很好地實(shí)現(xiàn)機(jī)器人的生長(zhǎng)和收回;疲勞試驗(yàn)表明,該材料可翻轉(zhuǎn)10萬次,但其變剛度控制調(diào)節(jié)性能一般,如圖5(d)所示。

圖5 尖端生長(zhǎng)機(jī)器人材料Fig.5 Tip-growth robotic materials
Do等[24]基于層干擾變剛度的原理,采用低密度聚乙烯塑料作為機(jī)器人主體材料,激光切割而成的聚酯纖維作為阻塞層材料,再將一系列的阻塞層用雙面膠固定在機(jī)器人主體上。每個(gè)阻塞層有兩個(gè)被動(dòng)閥,通過電磁鐵控制這些閥門的開閉,從而實(shí)現(xiàn)機(jī)器人的分布式變剛度控制,如圖6(a)所示。基于散粒體阻塞完成機(jī)構(gòu)的變剛度控制是目前研究最多的一種方法。Yanagida等[25]在尖端生長(zhǎng)型機(jī)器人主體材料(雙層)中加入散粒體,通過控制主體腔內(nèi)壓力實(shí)現(xiàn)伸縮,通過控制材料腔內(nèi)的壓力實(shí)現(xiàn)變剛度,如圖6(b)所示。
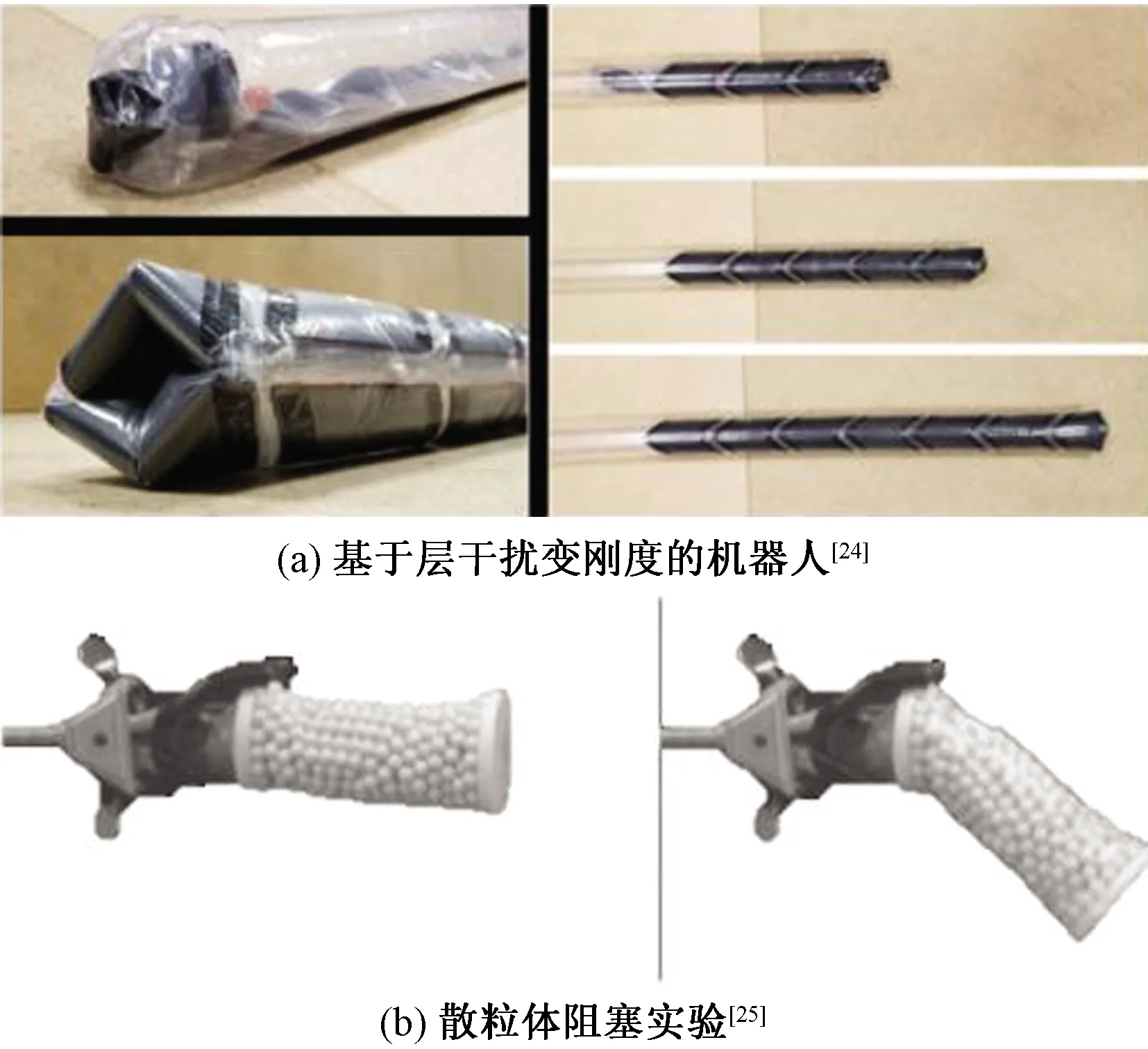
圖6 尖端生長(zhǎng)型機(jī)器人的變剛度控制Fig.6 Variable stiffness control of tip-growing robot
在尖端生長(zhǎng)型軟體機(jī)器人變剛度控制中,應(yīng)用最多的方法是依靠改變機(jī)器人主體腔內(nèi)的壓強(qiáng),來實(shí)現(xiàn)機(jī)器人的變剛度控制。這種方法的變剛度范圍較小,最大剛度取決于機(jī)器人主體材料不被破壞的極限受力。目前對(duì)于基于拮抗作用和材料相變的尖端生長(zhǎng)型軟體機(jī)器人變剛度控制研究較少,主要由于對(duì)軟體機(jī)器人實(shí)現(xiàn)變剛度控制一直是技術(shù)難點(diǎn),且變剛度結(jié)構(gòu)較為復(fù)雜。隨著材料科學(xué)的發(fā)展,不斷有新型材料出現(xiàn),對(duì)尖端生長(zhǎng)型機(jī)器人應(yīng)用可變剛度的材料,將會(huì)是解決軟體機(jī)器人變剛度控制的有效方法。
3 面向大范圍變形檢測(cè)的轉(zhuǎn)向結(jié)構(gòu)設(shè)計(jì)
大范圍變形檢測(cè)[26]是軟體機(jī)器人在移動(dòng)過程中必須考慮的重要問題,它關(guān)系到機(jī)器人主體的定位[27]及閉環(huán)控制[28]。目前的變形檢測(cè)方法主要有:基于視覺算法多相機(jī)重建機(jī)器人形狀[29]、超聲波檢測(cè)[30]、布拉格光柵檢測(cè)[31]等。基于視覺算法的變形檢測(cè)方法要布置相機(jī),且算法復(fù)雜、計(jì)算時(shí)間長(zhǎng);超聲波檢測(cè)存在信噪比的問題;布拉格光柵價(jià)格昂貴,難以在大范圍內(nèi)使用。
針對(duì)解決軟體機(jī)器人大范圍變形檢測(cè)的問題,尖端生長(zhǎng)機(jī)器人的轉(zhuǎn)向控制主要是用到類似差速的原理,保持機(jī)器人控制室內(nèi)一邊靜止(停止生長(zhǎng)),另一邊充氣加壓產(chǎn)生外翻,實(shí)現(xiàn)機(jī)器人的二維轉(zhuǎn)向。同理,在三維空間內(nèi),同時(shí)控制機(jī)器人三個(gè)控制室內(nèi)的壓強(qiáng),便可以實(shí)現(xiàn)三維空間的轉(zhuǎn)向。基于這種原理的轉(zhuǎn)向結(jié)構(gòu)在進(jìn)行變形檢測(cè)時(shí),主要是通過記錄軟體機(jī)器人在移動(dòng)時(shí)的速度、移動(dòng)方向和轉(zhuǎn)向角度,然后累積計(jì)算,求出軟體機(jī)器人的變形形狀及空間狀態(tài)。
Greer等[32-33]制作了三個(gè)串聯(lián)人工氣動(dòng)肌肉,將其圍繞機(jī)器人主體外側(cè)軸向排列,通過控制三個(gè)串聯(lián)人工氣動(dòng)肌肉的壓強(qiáng),改變機(jī)器人一側(cè)的長(zhǎng)度,完成機(jī)器人的轉(zhuǎn)向,如圖7(a)所示。串聯(lián)人工氣動(dòng)肌肉由聚乙烯薄壁管和O形圈組成,O形圈以一定間隔套在聚乙烯薄壁管上,通過放氣和充氣引起徑向膨脹,實(shí)現(xiàn)氣動(dòng)肌肉的長(zhǎng)度變化,如圖7(b)所示。這種轉(zhuǎn)向方式在機(jī)器人伸長(zhǎng)過長(zhǎng)時(shí),在機(jī)器人的尖端會(huì)有較明顯的時(shí)間延遲,且串聯(lián)人工氣動(dòng)肌肉在反復(fù)加壓、減壓操作后易產(chǎn)生疲勞。Hawkes等[12]設(shè)計(jì)了一種機(jī)械結(jié)構(gòu)式的轉(zhuǎn)向方案。沿機(jī)器人主體控制室軸向固定一系列閂鎖,閂鎖由3D打印制作而成,機(jī)器人共有4種生長(zhǎng)狀態(tài)。當(dāng)控制室減壓,來自主室的壓力迫使機(jī)器人主體側(cè)面的閂鎖處于鎖定狀態(tài)(狀態(tài)1);同時(shí),機(jī)器人尖端的閂鎖也處于鎖定狀態(tài)(狀態(tài)2),此時(shí)機(jī)器人可以直向生長(zhǎng)和收回;當(dāng)一側(cè)的控制室加壓,機(jī)器人主體側(cè)面的閂鎖由于自身獨(dú)特的結(jié)構(gòu)仍處于鎖定狀態(tài)(狀態(tài)3);同時(shí),尖端的閂鎖由于受到控制室內(nèi)的壓力被迫打開,褶皺被釋放,實(shí)現(xiàn)機(jī)器人的轉(zhuǎn)向(狀態(tài)4),如圖8(a)所示。Blumenschein等[34-35]將聚四氟乙烯材料做成管狀物,當(dāng)作一個(gè)制動(dòng)器,按照一定間距固定到尖端生長(zhǎng)機(jī)器人的主體表面,然后將一根線穿過制動(dòng)器,當(dāng)線和管子完全放松時(shí),機(jī)器人直向生長(zhǎng);當(dāng)拉近線時(shí),制動(dòng)器聚攏到一起,從而改變機(jī)器人主體的形狀,變成螺旋形,如圖8(b)所示。由于這種轉(zhuǎn)向方式只能產(chǎn)生螺旋形的旋轉(zhuǎn),形狀單一,容易實(shí)現(xiàn)變形檢測(cè),但應(yīng)用場(chǎng)景比較受限。
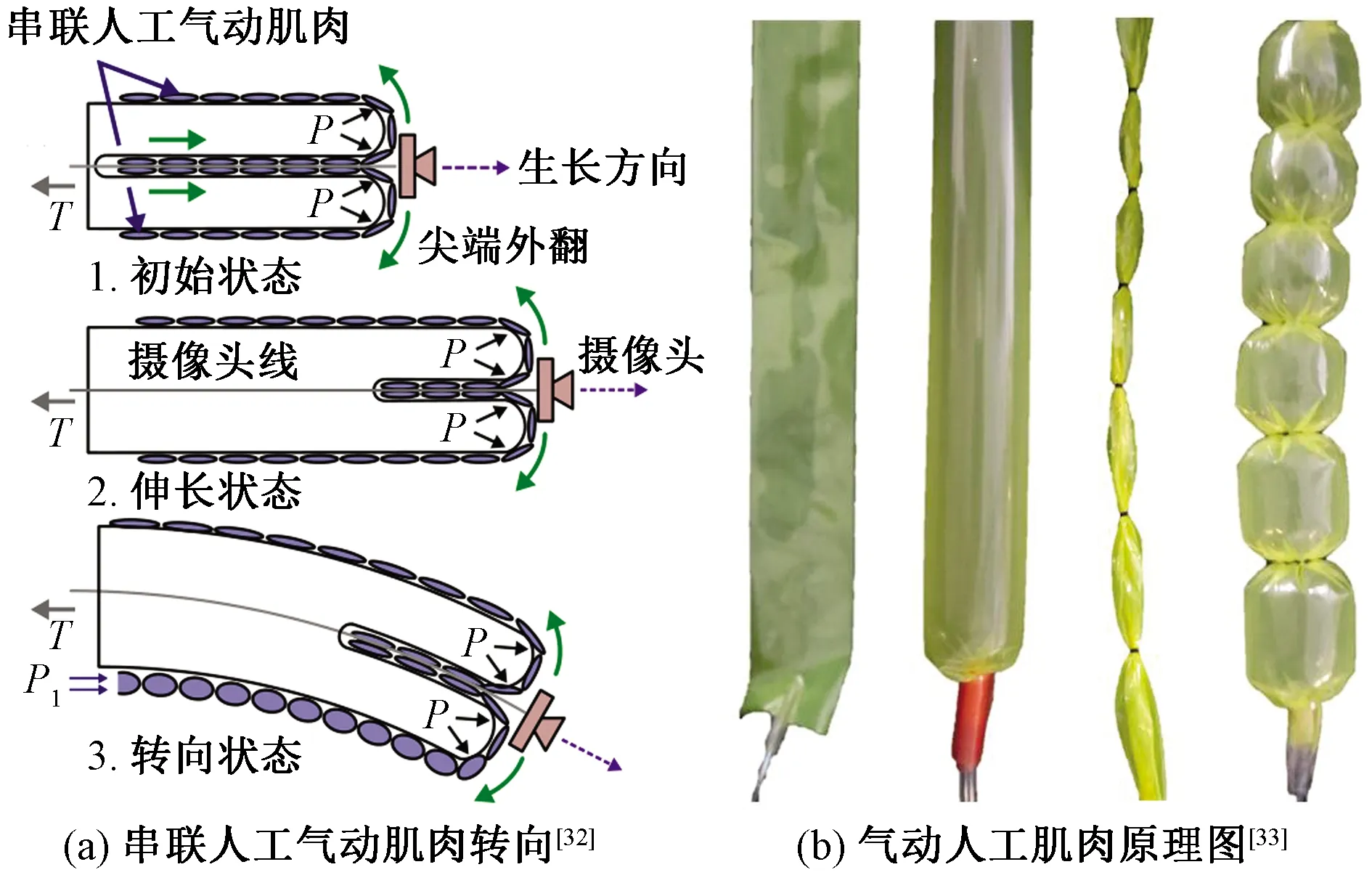
T為拉力;P為機(jī)器人主體內(nèi)壓強(qiáng);P1為控制室內(nèi)壓強(qiáng)圖7 串聯(lián)人工氣動(dòng)肌肉轉(zhuǎn)向控制Fig.7 Series pneumatic muscle steering control
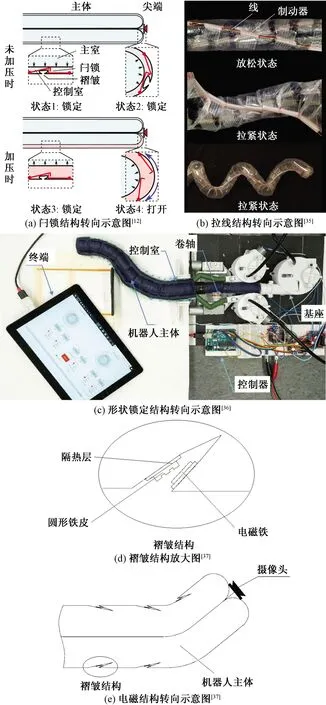
圖8 尖端生長(zhǎng)型機(jī)器人的幾種轉(zhuǎn)向結(jié)構(gòu)Fig.8 Several steering structures of tip-growing robot
Wang等[36]設(shè)計(jì)了一種可以形狀鎖定的轉(zhuǎn)向結(jié)構(gòu)。在機(jī)器人主體的兩側(cè)設(shè)置兩個(gè)控制腔室,腔室內(nèi)分別布置兩個(gè)相同結(jié)構(gòu)的尖端生長(zhǎng)機(jī)器人,通過改變控制腔室內(nèi)兩個(gè)機(jī)器人的相對(duì)長(zhǎng)度和壓強(qiáng),使機(jī)器人完成轉(zhuǎn)向和變剛度控制,如圖8(c)所示。這種轉(zhuǎn)向結(jié)構(gòu)的尖端生長(zhǎng)機(jī)器人在受限環(huán)境下,相比前幾種轉(zhuǎn)向結(jié)構(gòu)的機(jī)器人,可以達(dá)到更大的工作空間。周德開等[37]在機(jī)器人主體兩側(cè)表面連續(xù)均勻分布多個(gè)褶皺結(jié)構(gòu),如圖8(d)所示;每一個(gè)褶皺結(jié)構(gòu)的內(nèi)側(cè)設(shè)置圓形鐵皮,另一側(cè)設(shè)置電磁鐵,無需轉(zhuǎn)向時(shí),電磁鐵通電將鐵皮吸合;需要轉(zhuǎn)向時(shí),將尖端處的電磁鐵斷電,釋放主體材料的褶皺部分,由于機(jī)器人主體兩側(cè)長(zhǎng)度不一致而實(shí)現(xiàn)轉(zhuǎn)向,如圖8(e)所示。
以上轉(zhuǎn)向結(jié)構(gòu)的原理都是機(jī)器人主動(dòng)控制轉(zhuǎn)向的,在某些場(chǎng)景不需要機(jī)器人主動(dòng)改變形狀,可以對(duì)機(jī)器人的形狀進(jìn)行預(yù)編程,以減少結(jié)構(gòu)復(fù)雜度。Slade等[38]通過加熱熱塑性材料,在所需形狀的模具上拉伸,使材料熱定型。Satake等[39]在機(jī)器人主體材料上指定位置粘貼膠帶,使聚乙烯薄膜產(chǎn)生褶皺,從而實(shí)現(xiàn)特定形狀的伸長(zhǎng)。
上述轉(zhuǎn)向結(jié)構(gòu)的變形檢測(cè)都是通過計(jì)算已記錄的速度、移動(dòng)方向和轉(zhuǎn)向角度來實(shí)現(xiàn),隨著機(jī)器人的不斷伸長(zhǎng),這種方法的累積誤差會(huì)越來越大,位置精度逐漸降低。Watson等[40]設(shè)計(jì)了一種基于永磁體的變形檢測(cè)方法,在尖端生長(zhǎng)型機(jī)器人尖端安裝一個(gè)環(huán)形磁鐵,再將機(jī)器人放置于磁傳感器陣列中移動(dòng),可以有效記錄機(jī)器人的變形情況。目前對(duì)于軟體機(jī)器人的變形檢測(cè)研究還比較少,尖端生長(zhǎng)型機(jī)器人在這方面的研究更少,但變形檢測(cè)仍是機(jī)器人控制中的一個(gè)重要問題。
4 面向精準(zhǔn)控制的建模
相比傳統(tǒng)剛性機(jī)器人可以用6個(gè)自由度表示,由于軟體機(jī)器人理論上具有無限多個(gè)自由度,這給軟體機(jī)器人的建模和精準(zhǔn)控制帶來了很大難度。剛性機(jī)器人運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)建模及系統(tǒng)幾何關(guān)系描述一般采用D-H(由Danevit、Hartenberg提出)參數(shù)法[41],對(duì)于軟體機(jī)器人,常用的是在D-H參數(shù)法基礎(chǔ)上提出的分段常曲率理論模型[42-43]。此外,軟體機(jī)器人的運(yùn)動(dòng)類似于超冗余度機(jī)器人[44],也可以使用超冗余度建模方法[45-46]近似研究軟體機(jī)器人。
為了解決軟體機(jī)器人的精準(zhǔn)控制問題,對(duì)尖端生長(zhǎng)型機(jī)器人進(jìn)行建模研究,Blumenschein等[47]基于尖端生長(zhǎng)型機(jī)器人低慣性的特性,建立了靜態(tài)力平衡模型。該模型將力分為驅(qū)動(dòng)力和損失力:驅(qū)動(dòng)力指施加在機(jī)器人尖端外翻橫截面的壓力,損失力指機(jī)器人從基座生長(zhǎng)到尖端損失的力和尖端外翻過程中損失的力。Naclerio等[48]考慮到機(jī)器人受外力作用,驅(qū)動(dòng)力無法全部作用到介質(zhì)中,引出了比例系數(shù)和抵抗力。Haggerty等[49]在Blumenschein等[47]的基礎(chǔ)上,針對(duì)機(jī)器人與環(huán)境交互的過程,分別對(duì)無約束環(huán)境和有約束環(huán)境建模,提出了一種自屈服的模型。Godaba等[50]利用Timoshenko梁理論考慮了旋轉(zhuǎn)和剪切效應(yīng),研究了尖端生長(zhǎng)型機(jī)器人的各種失效方式,以及在軸向和橫向載荷下的有效載荷和極限載荷。Del等[51-52]通過在機(jī)器人尖端布置一個(gè)類似3D打印機(jī)的裝置,通過控制打印裝置在尖端區(qū)域增加材料進(jìn)行導(dǎo)航;并計(jì)算出一系列用齊次坐標(biāo)表示的旋轉(zhuǎn)-平移矩陣來模擬機(jī)器人的生長(zhǎng),建立了尖端生長(zhǎng)機(jī)器人的動(dòng)力學(xué)模型。
對(duì)于剛體機(jī)器人,與環(huán)境接觸通常是較危險(xiǎn)的;但對(duì)于軟體機(jī)器人,由于其低慣性和較高的柔順性,與環(huán)境接觸是相對(duì)安全的,且有助于機(jī)器人實(shí)現(xiàn)更精準(zhǔn)的控制。利用這個(gè)優(yōu)點(diǎn),Greer等[53]建立了一個(gè)機(jī)器人—障礙交互模型,并開發(fā)了一種考慮障礙物碰撞的生長(zhǎng)機(jī)器人路徑確定算法。之后,Greer等[54]又將機(jī)器人通過與障礙物接觸來實(shí)現(xiàn)高魯棒性導(dǎo)航,提出了一種集總參數(shù)的運(yùn)動(dòng)學(xué)模型。該模型將機(jī)器人主體標(biāo)記成一系列樞軸點(diǎn),每當(dāng)機(jī)器人轉(zhuǎn)向或者接觸到障礙物時(shí),增加一個(gè)樞軸點(diǎn),通過記錄樞軸點(diǎn)位置及轉(zhuǎn)彎角度,建立機(jī)器人的微分運(yùn)動(dòng)學(xué)模型,如圖9所示。在機(jī)器人伸長(zhǎng)過程中,如果與障礙物正面接觸,尖端生長(zhǎng)型機(jī)器人可能會(huì)出現(xiàn)卡死情況。針對(duì)此問題,Ozkan-Aydin等[55]證明了機(jī)器人尖端的小幅振蕩可以改善機(jī)器人的穿越障礙物的能力,使其能夠在沒有任何反饋控制的情況下穿越所搭建的異構(gòu)環(huán)境。Selvaggio等[56]有效地利用障礙交互來擴(kuò)大機(jī)器人尖端可達(dá)工作空間的集合,并設(shè)計(jì)了一種新的基于障礙物交互的路徑規(guī)劃算法,該算法以最小的姿態(tài)誤差找到使機(jī)器人到達(dá)期望位置的障礙物序列。El-Hussieny等[57]基于歐拉-拉格朗日方程,建立了尖端生長(zhǎng)機(jī)器人的高效動(dòng)力學(xué)模型,并設(shè)計(jì)了基于重力補(bǔ)償模型的PD閉環(huán)控制器,無需實(shí)體機(jī)器人便可以使用MATLAB軟件進(jìn)行仿真驗(yàn)證。

O1、O2為障礙物點(diǎn);C1、C2、C3、C4為樞紐點(diǎn);t1~t4為時(shí)間序列圖9 集總參數(shù)運(yùn)動(dòng)學(xué)建模[54]Fig.9 Lumped parameter kinematic modeling[54]
以上的建模方法針對(duì)不同結(jié)構(gòu)的尖端生長(zhǎng)型機(jī)器人,建立對(duì)應(yīng)的模型,有效提高了機(jī)器人的控制精度。由于軟體機(jī)器人的運(yùn)動(dòng)具有非線性的特點(diǎn),針對(duì)不同結(jié)構(gòu)、不同環(huán)境下的尖端生長(zhǎng)型機(jī)器人,建模方法往往大不相同,如何針對(duì)特定結(jié)構(gòu)的末端生長(zhǎng)型機(jī)器人建立數(shù)學(xué)模型,以實(shí)現(xiàn)精準(zhǔn)的運(yùn)動(dòng)控制仍是以后的研究重點(diǎn)。
5 應(yīng)用場(chǎng)景
5.1 救災(zāi)探險(xiǎn)
尖端生長(zhǎng)型軟體機(jī)器人獨(dú)有的無環(huán)境阻力及可大幅生長(zhǎng)的特性,十分適合在救災(zāi)探險(xiǎn)領(lǐng)域應(yīng)用。在廢墟中救災(zāi),尖端生長(zhǎng)型軟體機(jī)器人內(nèi)部的天然通道,可以用來給幸存者傳送水和食物;在機(jī)器人末端安裝攝像頭,可以有效獲取幸存者的聲音和個(gè)體圖像,判斷幸存者當(dāng)前的身體狀態(tài),從而正確施展相應(yīng)援救措施,極大地提高幸存者生還率。當(dāng)機(jī)器人被重物壓到時(shí),尖端生長(zhǎng)型軟體機(jī)器人若能實(shí)時(shí)改變剛度,并實(shí)現(xiàn)實(shí)時(shí)的變形檢測(cè),則能有效降低機(jī)器人受損的概率和強(qiáng)度。
Tsukagoshi等[58]設(shè)計(jì)一款名叫Grow-hose-Ⅰ的救災(zāi)機(jī)器人,該款機(jī)器人使用兩根軟皮管作為生長(zhǎng)主體,并在機(jī)器人末端安裝攝像機(jī)和帶傳感裝置的頭部單元,沿著主體設(shè)置柔性導(dǎo)軌,用以固定頭部單元,如圖10(a)所示。實(shí)驗(yàn)證明,機(jī)器人可以在彎曲狹窄的通道內(nèi)順利通過,如圖10(b)所示。針對(duì)機(jī)器人內(nèi)部電線的滑動(dòng)速度是機(jī)器人生長(zhǎng)速度兩倍造成電線累積的問題,如圖10(c)所示,Mishima等[59]設(shè)計(jì)了一種新型的頭部單元和搜救機(jī)器人DETube。在機(jī)器人的頭部單元增加電機(jī)和卷軸,使機(jī)器人在生長(zhǎng)過程中,將多余的電線纏繞在卷軸上,如圖10(d)所示。Coad等[22,60]設(shè)計(jì)了一種新的電線儲(chǔ)存方式,攝像頭的電線不是在機(jī)器人內(nèi)部通道內(nèi)滑動(dòng),而是在機(jī)器人主體外表面滑動(dòng),隨著機(jī)器人生長(zhǎng),不斷變長(zhǎng)的電線會(huì)被拉鏈鎖住,從而避免電線的纏繞問題,并在機(jī)器人比賽和考古遺址探索中應(yīng)用,如圖11所示。Luong等[61]將尖端生長(zhǎng)機(jī)器人應(yīng)用到海底珊瑚礁的探索中,依靠尖端生長(zhǎng)機(jī)器人的柔順性可以實(shí)現(xiàn)無損地穿越自然縫隙;在機(jī)器人尖端增加磁性吸附機(jī)構(gòu),再將攝像頭安裝在磁吸附結(jié)構(gòu)上,實(shí)現(xiàn)海下的圖像反饋,如圖12所示。
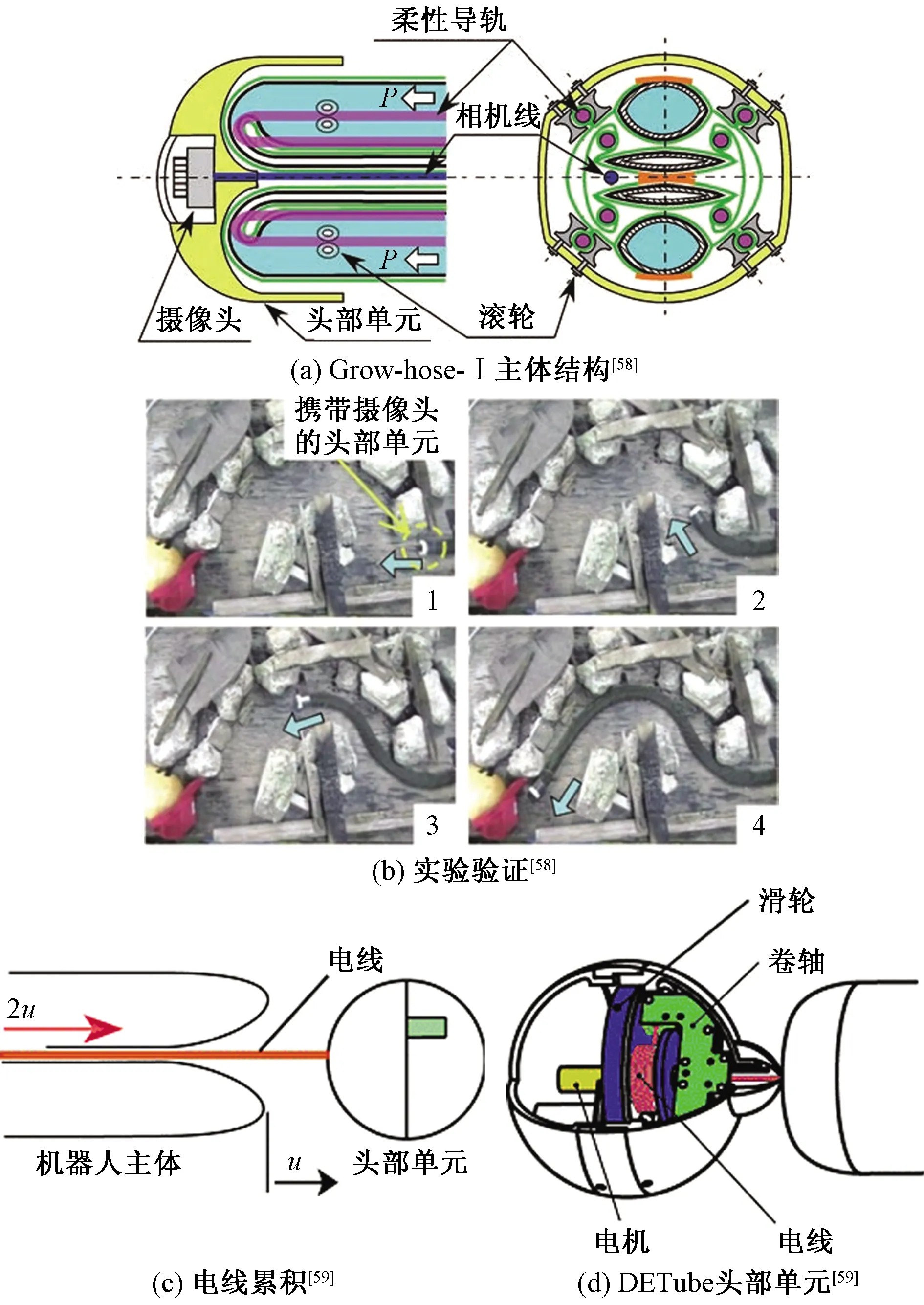
P為壓強(qiáng);u為速度圖10 救災(zāi)機(jī)器人[37]Fig.10 Disaster relief robot[37]
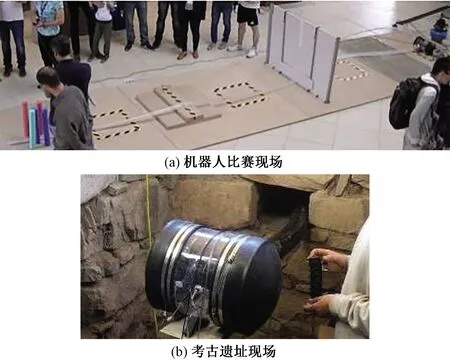
圖11 機(jī)器人比賽和考古遺址應(yīng)用[22]Fig.11 Robot competition and archaeological site application[22]
5.2 可重置結(jié)構(gòu)
尖端生長(zhǎng)型軟體機(jī)器人的主體表面可布置物體,隨著機(jī)器人的外翻生長(zhǎng),實(shí)現(xiàn)物體結(jié)構(gòu)的重新配置。Blumenschein等[34]在尖端生長(zhǎng)機(jī)器人的主體外表面布置一系列的銅條,隨著機(jī)器人生長(zhǎng),在尖端處的銅條導(dǎo)體會(huì)與腔內(nèi)的銅條斷開,形成單極天線,改變天線的長(zhǎng)度可以改變諧振頻率。通過調(diào)整尖端生長(zhǎng)型機(jī)器人的伸縮,即可實(shí)現(xiàn)對(duì)單機(jī)天線工作頻率的調(diào)節(jié),如圖13(a)所示。螺旋天線可以收發(fā)外部空間中旋轉(zhuǎn)的偏振電磁信號(hào),廣泛應(yīng)用在全球定位系統(tǒng)(global positioning system,GPS)、衛(wèi)星、雷達(dá)等無線通信系統(tǒng),Gan等[62]通過在尖端生長(zhǎng)機(jī)器人主體的外表面布置天線和肌腱,實(shí)現(xiàn)螺旋天線的制作,如圖13(b)所示。軟體機(jī)器人在可穿戴設(shè)備上也具有很大的潛力,Agharese等[63]設(shè)計(jì)了一款名叫HapWRAP的可穿戴設(shè)備,該設(shè)備可環(huán)繞手臂生長(zhǎng),并為用戶提供方向和力反饋的組合,如圖13(c)所示。
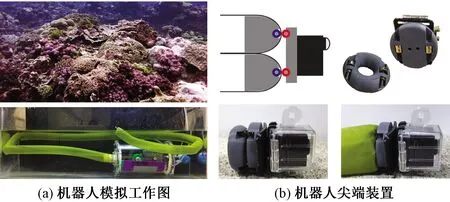
圖12 海下尖端生長(zhǎng)機(jī)器人[61]Fig.12 Undersea tip-growth robot[61]
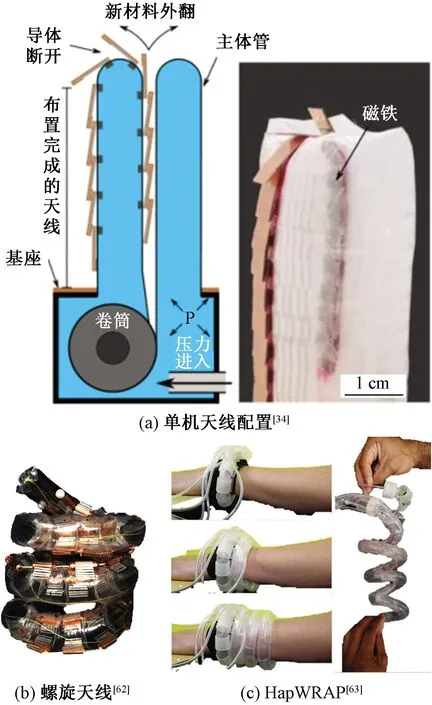
圖13 可重置結(jié)構(gòu)應(yīng)用Fig.13 Resettable structure application
5.3 醫(yī)療
在醫(yī)療領(lǐng)域,由于軟體機(jī)器人主要由柔性材料制成,柔順性好、剛度低,相比剛性機(jī)器人更有優(yōu)勢(shì),安全性也大大提高。目前,軟體機(jī)器人在醫(yī)療領(lǐng)域的研究主要有微創(chuàng)手術(shù)[64-68]、心臟外科[69]、康復(fù)治療[70]及人工器官[71]等方面。
為了防止長(zhǎng)期臥床不起的病人出現(xiàn)壓瘡,Nakamura等[72]利用尖端生長(zhǎng)型機(jī)器人相對(duì)環(huán)境無摩擦的特性,設(shè)計(jì)了一種幫助病人實(shí)現(xiàn)床上翻身的輔助裝置,這個(gè)裝置具有較高的剛度,如圖14(a)所示。對(duì)于涉及軟組織的手術(shù),要求手術(shù)醫(yī)生在使用器械時(shí),使導(dǎo)致組織損失或出血的剪切力降到最低。尖端生長(zhǎng)型機(jī)器人可以在狹窄空間無阻力運(yùn)動(dòng),可以有效降低剪切力。Slade等[38]根據(jù)此原理設(shè)計(jì)出一種用于受限環(huán)境下外科手術(shù)的低剪切力軟導(dǎo)管,且可實(shí)現(xiàn)對(duì)該軟導(dǎo)管的精準(zhǔn)控制,如圖14(b)所示。在結(jié)腸鏡檢查過程中,內(nèi)窺鏡通過彎曲的大腸時(shí),不僅會(huì)造成患者疼痛,還會(huì)對(duì)大腸造成一定損傷[73]。Yanagida等[25]將可變剛度的尖端生長(zhǎng)型軟體機(jī)器人吹進(jìn)死豬的大腸內(nèi),抽真空之后實(shí)現(xiàn)較高的剛度,再插入內(nèi)窺鏡進(jìn)行檢查,有效降低了內(nèi)窺鏡直接接觸腸體的力,如圖14(c)所示。
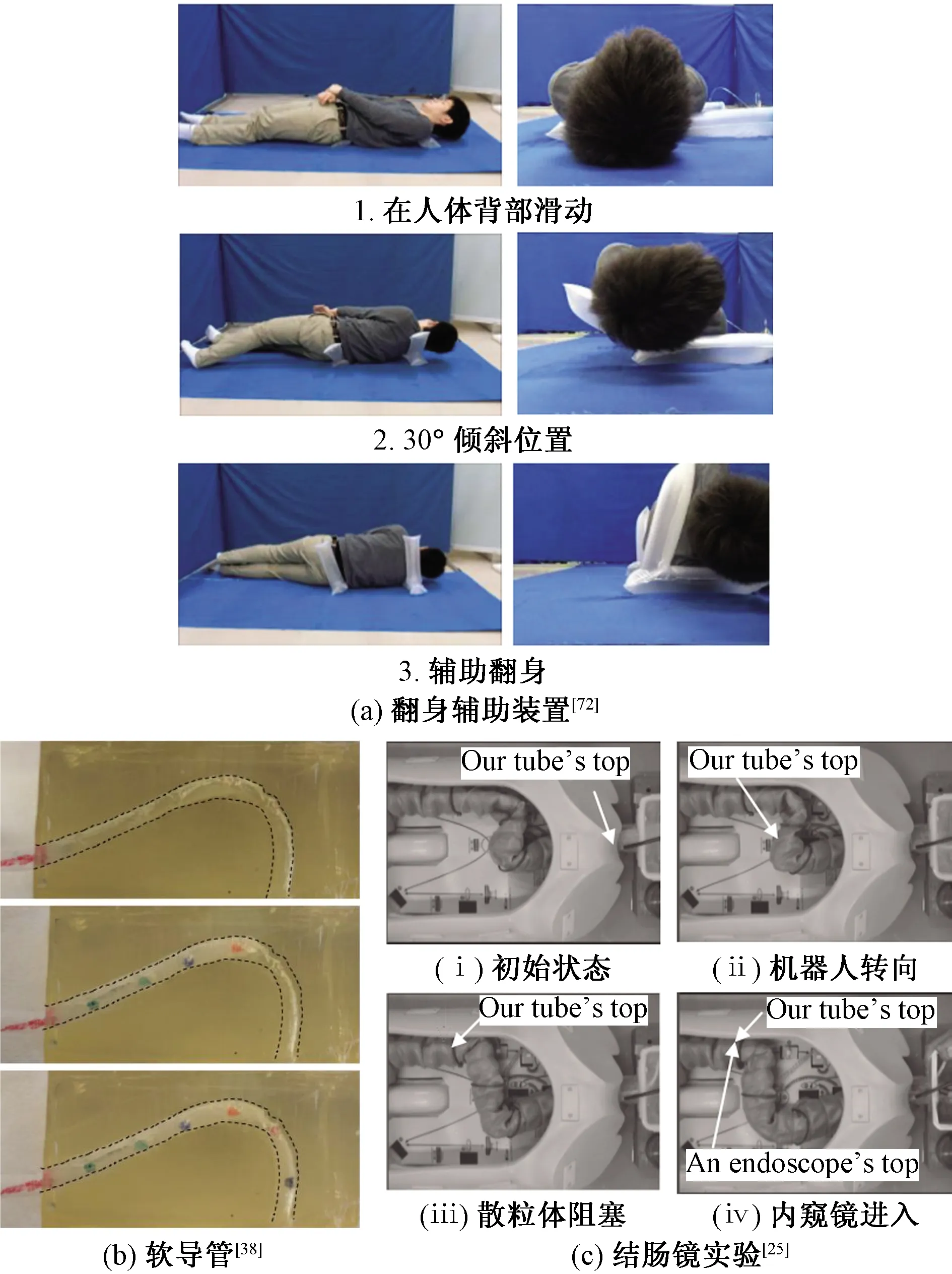
圖14 尖端生長(zhǎng)型機(jī)器人在醫(yī)療領(lǐng)域的幾種應(yīng)用Fig.14 Several applications of tip-growth robots in the medical field
5.4 其他
尖端生長(zhǎng)型機(jī)器人還可以用作末端執(zhí)行器,對(duì)物體進(jìn)行抓取,由于材料是柔軟的,對(duì)被抓取物體的損害極低。Stroppa等[74]基于手臂手勢(shì)來遙控尖端生長(zhǎng)機(jī)器人抓取物體,由于機(jī)器人的低慣性和柔順性,可以實(shí)現(xiàn)安全的人機(jī)交互,如圖15(a)所示。Jeong等[75]使用他們?cè)O(shè)計(jì)的新型尖端生長(zhǎng)型機(jī)器人進(jìn)行尖端極限受力測(cè)試,測(cè)得在機(jī)器人收縮時(shí)最大可以攜帶2.5 kg的重物,如圖15(b)所示。Sadeghi等[76]根據(jù)植物根部尖端生長(zhǎng)的原理,設(shè)計(jì)了一種土壤滲透機(jī)器人機(jī)構(gòu),如圖15(c)所示。利用末端生長(zhǎng)型機(jī)器人與環(huán)境交互無摩擦的特性,Naclerio等[48,77]結(jié)合顆粒流態(tài)化的原理,通過在機(jī)器人內(nèi)部腔室加入空氣流,實(shí)現(xiàn)在干燥的沙土環(huán)境中進(jìn)行挖掘,如圖15(d)所示。這種設(shè)備未來可以應(yīng)用到泥石流或者淺層地下的搜索和救援中,尤其在低重力環(huán)境中,這種挖土機(jī)器人更具優(yōu)勢(shì),未來可以應(yīng)用到月球的土壤采樣,甚至是更遠(yuǎn)的天體。
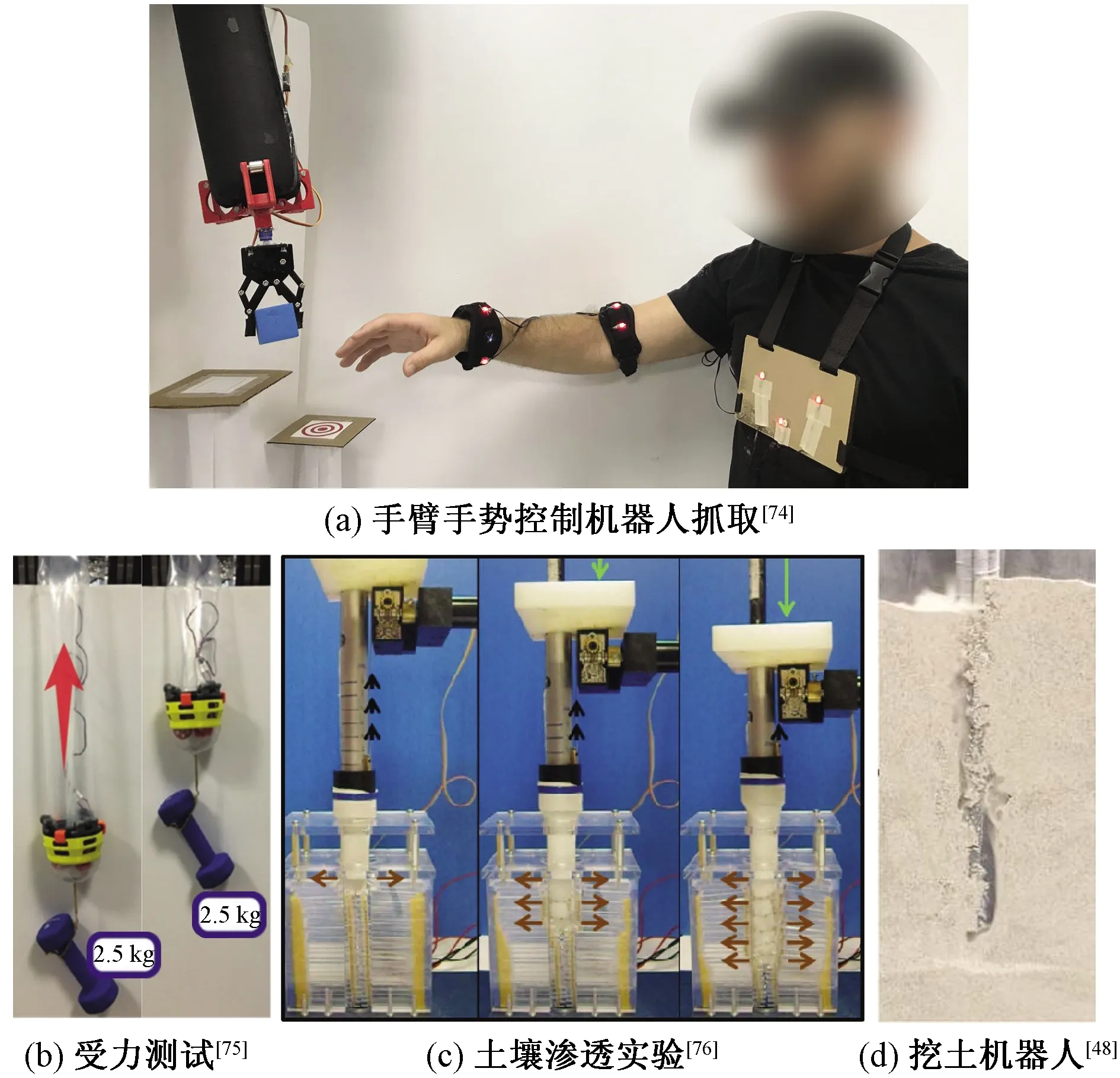
圖15 尖端生長(zhǎng)機(jī)器人的幾種應(yīng)用Fig.15 Several applications of tip-growth robots
6 總結(jié)與展望
首先提到了軟體機(jī)器人目前存在的三大主要問題,針對(duì)如何解決這些問題,引出了從植物身上產(chǎn)生靈感的尖端生長(zhǎng)型軟體機(jī)器人,緊接著介紹了尖端生長(zhǎng)型軟體機(jī)器人的基本工作原理和結(jié)構(gòu)。然后圍繞提出的三個(gè)主要問題,從機(jī)器人材料選取、轉(zhuǎn)向結(jié)構(gòu)設(shè)計(jì)、建模及應(yīng)用場(chǎng)景四大方面對(duì)尖端生長(zhǎng)型軟體機(jī)器人進(jìn)行了詳細(xì)說明。
尖端生長(zhǎng)型軟體機(jī)器人制造成本低、可擴(kuò)展性強(qiáng),且具有無環(huán)境阻力的獨(dú)特優(yōu)勢(shì),這些優(yōu)勢(shì)使其在許多應(yīng)用領(lǐng)域有很大的潛力,如醫(yī)療、救災(zāi)和服務(wù)機(jī)器人等。目前,對(duì)于尖端生長(zhǎng)型軟體機(jī)器人的研究,大多停留在理論和實(shí)驗(yàn)階段,暫無落地的商用產(chǎn)品出現(xiàn),還有很長(zhǎng)的路要走。新型材料大量出現(xiàn),在未來可以嘗試使用適合特定工作場(chǎng)景的新型材料,發(fā)揮尖端生長(zhǎng)型軟體機(jī)器人的最大性能。隨著人工智能(artificial intelligence,AI)的發(fā)展,應(yīng)用AI技術(shù),實(shí)現(xiàn)機(jī)器人的自主操作,機(jī)器人智能化也是未來發(fā)展的一個(gè)重要方向。
猜你喜歡
南大法學(xué)(2021年3期)2021-08-13 09:22:32
阿來研究(2021年1期)2021-07-31 07:39:04
小讀者(2021年2期)2021-03-29 05:03:48
瘋狂英語·新悅讀(2019年11期)2019-12-18 05:14:16
華人時(shí)刊(2019年13期)2019-11-17 14:59:54
NBA特刊(2018年21期)2018-11-24 02:48:04
文苑(2018年22期)2018-11-19 02:54:14
中國(guó)自行車(2018年9期)2018-10-13 06:17:10
紅領(lǐng)巾·萌芽(2016年1期)2016-09-10 07:22:44
金色年華(2016年13期)2016-02-28 01:43:27