基于LabVIEW的塔機起重臂擺動檢測及分析*
2022-03-24 06:30:26許名熠石芳何首文
電氣傳動自動化 2022年1期
許名熠,石芳,何首文
(1.湖南安全技術職業學院防災與救援學院,湖南 長沙 410151;2.中聯重科股份有限公司,湖南 長沙 410013)
塔式起重機由于作業半徑大、起重量大、效率高等優點,被廣泛應用于各類建筑施工中[1],其主要機構由塔身、起重臂、平衡臂、塔頭、頂升套架等組成。在施工作業中,主要由起升、回轉、變幅機構動作來完成吊重轉運,其中回轉機構的功能主要是驅動塔身上部的起重臂和平衡臂做水平的回轉運動。由于塔式起重機的起重臂一般比較長,所以起重臂的運動控制具有大慣性特點,同時在運動過程中受風阻力、塔身應力等因素的干擾影響,是一個非常復雜的非線性控制系統[2]。
起重臂平穩運行對現場作業的效率影響很大,所以司機在操作過程中,對起重臂回轉運動的性能非常關注。回轉啟動時的響應和切換檔位時的擺動決定了司機吊重重物的就位精度和效率[3]。本文基于NI數據采集模塊和LabVIEW數據采集軟件,利用DAQ設計助手對塔機回轉運動時臂尖加速度進行檢測,并分析作業過程中的回轉擺動情況。
1 基于CompactDAQ的數據采集系統設計
系統采用cDAQ-9188機箱配置模擬量數據采集模塊采集加速度傳感器的信號。DAQ-9188機箱是NI公司專為小型分布式傳感器測量系統設計的CompactDAQ以太網機箱。該機箱可以擴展C系列模塊與外部主機之間的定時、同步和數據傳輸。
C系列電壓輸入模塊NI9201為8通道的高性能監測模塊,采樣率可達500kS/s,電壓范圍為±10V,模擬輸入分辨率12bits,并提供了可編程的輸入范圍。NI9201模塊具有高達100V的過壓保護,保證了良好的安全性和抗擾性,CompactDAQ數據采集硬件圖如圖1所示。
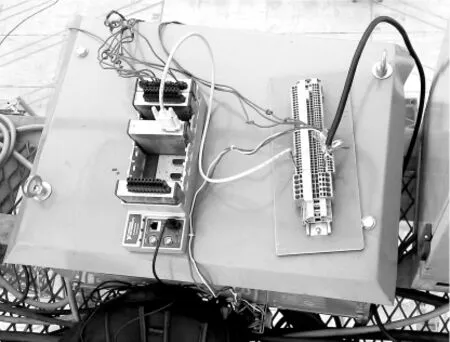
圖1 CompactDAQ數據采集硬件圖
測量臂尖運行情況的加速度傳感器采用PCB公司的3713B1110G,精度±5%(200mV/g),量程±10g pk(±98.1m/s2pk),非線性度≤1%。加速度傳感器安裝在臂尖位置(塔機型號為TC6517-10),PCB加速度傳感器現場安裝圖如圖2所示。

圖2 PCB加速度傳感器現場安裝圖
2 LabVIEW數據采集程序設計
LabVIEW 程序稱為虛擬儀器程序,簡稱 VI[4]。數據采集程序有前面板(如圖3所示)和程序框圖(如圖4所示)兩個界面。前面板就是圖形化用戶界面,框圖程序用圖形化編程語言編寫。
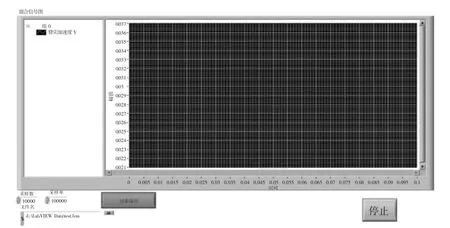
圖3 數據采集程序前面板
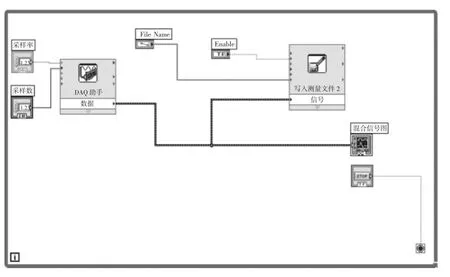
圖4 數據采集程序框圖
加速度傳感器的信號采集通過DAQ助手進行配置[5],DAQ助手是數據采集功能函數的有機集合的圖形化界面,可以方便地進行通道選擇、信號范圍輸入、采集模式配置、觸發以及定時選擇等(見圖5),將電壓輸入模塊NI9201在線讀取之后,可以方便地選擇加速度傳感器信號的輸入通道,并根據傳感器的信號類型,選擇為-10V~10V的電壓輸入范圍。
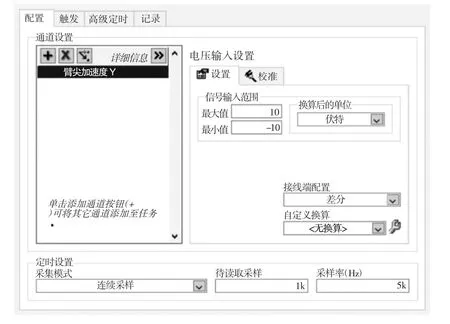
圖5 DAQ助手配置界面
采樣率及采樣數通過設置窗口可以實時更改,方便現場測試的需要。通過“寫入測量文件”控件將采集到的傳感器數據保存到本地PC機的設定路徑。“混合信號圖”可以將采集到的數據進行實時顯示,方便測量時的數據監視。并設計數據采集程序的啟動/停止按鈕,在測試時對數據采集進行控制。
3 讀取程序設計及數據分析
系統采樣率在1kHz左右,采樣時間在60秒左右,數據采集量會比較大,LabVIEW軟件的數據采集之后是以TDMS文件格式保存在PC機存儲器。要對數據進行分析,需要設計數據讀取以及分析處理軟件。
在LabVIEW框圖程序界面調用“讀取測量文件”控件可以將TDMS文件格式數據導入,通過濾波后在波形圖表上顯示,讀取程序框圖如圖6所示。
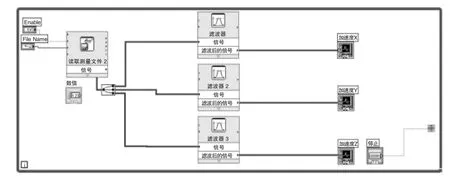
圖6 讀取程序框圖
數據的濾波處理采用低通濾波的方式,并滿足Nyquist(奈奎斯特)第一準則。奈奎斯特第一準則規定了在有限帶寬內同步數據傳輸而不產生符號間串擾(ISI)的條件,也規定了一系列無ISI的脈沖波形選擇方法和一系列濾波器的設計方法。其傳輸角頻率(也稱奈奎斯特頻率)受到如下限制:

濾波器配置完成后,就可以對數據進行導入顯示及分析,型號為3713B1110G的加速度傳感器可以測試X,Y,Z軸三個方向的量(加速度傳感器三軸方向見圖7),根據塔式起重機起重臂回轉運動的方向,需要分析的是臂尖Y軸的數據,Y軸方向的加速度值反應了起重臂的臂尖在回轉運動的抖動情況,從而觀察回轉運動的響應及穩定性。
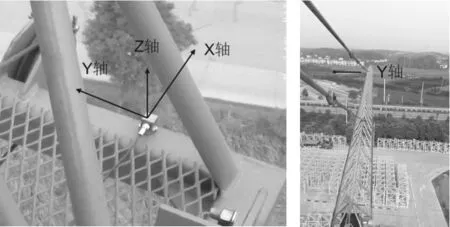
圖7 加速度傳感器三軸方向
塔式起重機回轉機構在三種操作方式(見圖8、圖9和圖10)下臂尖加速度傳感器Y軸的數據如表1所示。
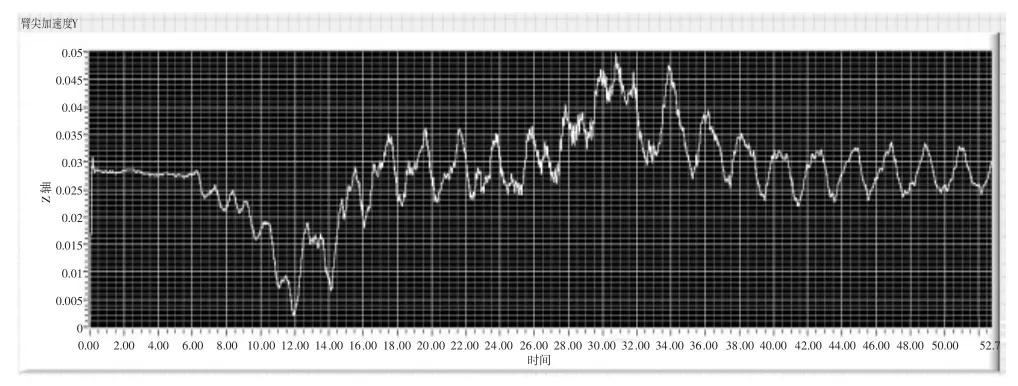
圖8 回轉向右1檔到5檔順序升降(X軸為s,Y軸為V)
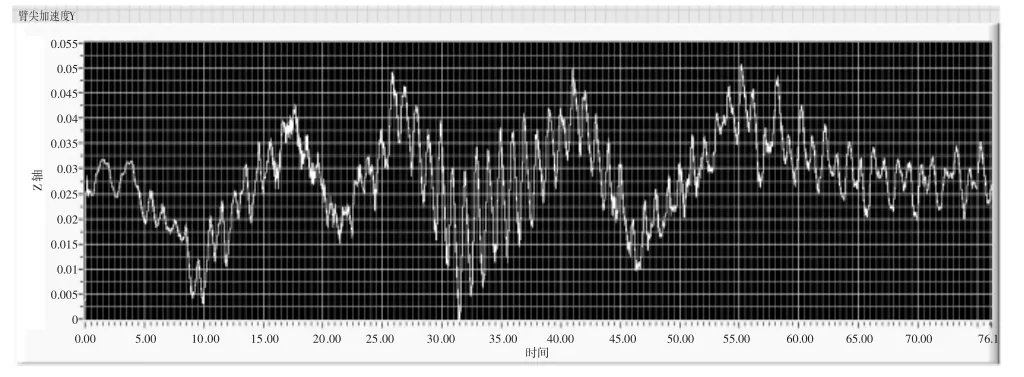
圖9 回轉向右1檔到4檔多次切換(X軸為s,Y軸為V)
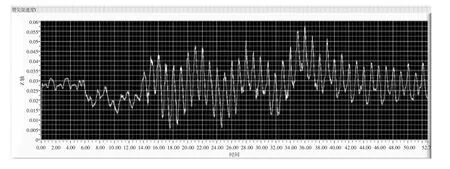
圖10 回轉向右1檔多次點動(X軸為s,Y軸為V)
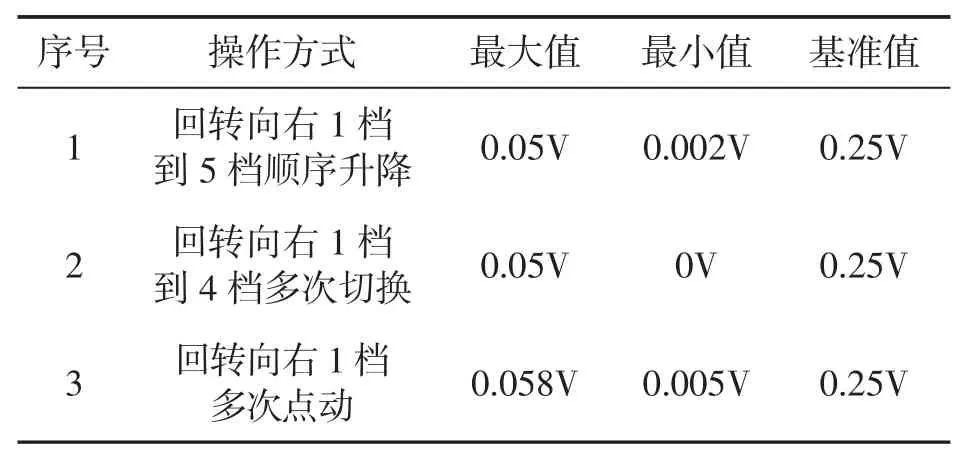
表1 不同操作方式下Y軸的數據
根據加速度傳感器(3713B1110G)的量程及DAQ助手的電壓輸入范圍以及對基準值的修正,所對應的加速度a值如表2所示。

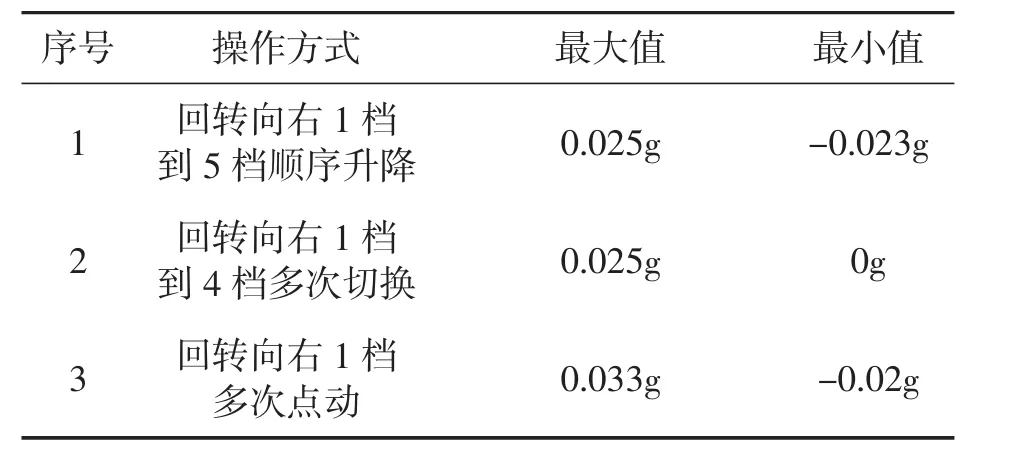
表2 Y軸的加速度a值
結合各波形圖及表2可以看出,回轉在啟動運行時會產生一定的超調以及振蕩,當檔位穩定并勻速運行時加速度趨于0,當多次切換時加速度波動明顯,振蕩加劇,能夠真實反應塔式起重機在回轉動作時的運行情況。
4 結論
本文在CompactDAQ數據采集及加速度傳感器的硬件基礎上,通過設計LabVIEW數據采集及讀取程序,在塔式起重機上進行了起重臂臂尖回轉擺動加速度的數據采集,并分析了在回轉機構不同操作模式下的加速度曲線及變化情況,設計了一種回轉機構性能驗證的方法,為后續塔式起重機回轉機構控制優化及性能改善研究奠定了基礎。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
人大建設(2019年12期)2019-05-21 02:55:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
