基于CY7C63813-SXC 控制器軌跡球的設(shè)計(jì)與實(shí)現(xiàn)
2022-03-24 02:34:46官茂
長(zhǎng)沙大學(xué)學(xué)報(bào) 2022年2期
關(guān)鍵詞:自動(dòng)識(shí)別
官茂
(湖南興天電子科技有限公司技術(shù)中心,湖南 長(zhǎng)沙 410006)
目前,人們?cè)谟?jì)算機(jī)上使用的人機(jī)接口設(shè)備,如鼠標(biāo)、鍵盤等,大部分都是USB 接口,但PS/2接口因其傳輸距離相對(duì)更長(zhǎng),在某些特定領(lǐng)域仍被使用。例如,支持PS/2 接口的嵌入式軌跡球(以下簡(jiǎn)稱軌跡球)是一種特殊的鼠標(biāo),是使用光學(xué)感應(yīng)元器件和其原理制造的能管控屏幕或光標(biāo)的人機(jī)接口設(shè)備,可在一定程度上讓使用人手腕的疲勞感降低,同時(shí)具有定位精準(zhǔn)、手感較好的優(yōu)點(diǎn),所以在工業(yè)控制和軍用設(shè)備中仍被廣泛使用。
目前,市面上一部分軌跡球僅能支持PS/2或USB 接口的工作模式。在此基礎(chǔ)上,文章采用Cypress 公司的enCoRe? Ⅱ系列USB 控制器CY7C63813-SXC 作為核心器件(enCoRe? ⅡLow Speed USB Peripheral Controller)[1],使用C 語言編程,設(shè)計(jì)了一款在USB 和PS/2 接口模式下都能工作的軌跡球。 此軌跡球在CY4623例程(CY4623 是Cypress 公司提供的鼠標(biāo)參考設(shè)計(jì)樣例)的基礎(chǔ)上,實(shí)現(xiàn)了自動(dòng)識(shí)別PS/2 接口和USB 接口的算法,采集軌跡球球體在X軸、Y軸方向的移動(dòng)量的算法及通過撥碼開關(guān)切換X軸、Y軸及其正方向的算法。
1 嵌入式軌跡球工作原理
自動(dòng)識(shí)別USB 和PS/2 接口的軌跡球主要由主控制電路(含CY7C63813 芯片)、光耦(包括X軸、Y軸、Z軸,其中Z軸光耦是預(yù)留設(shè)計(jì),文章沒有使用)、按鍵(L、M、R,即左鍵、中鍵、右鍵)、PS/2 接口連接器、USB 接口連接器等組成。
光耦作為產(chǎn)生、探測(cè)、接收紅外光線,并將紅外光信號(hào)轉(zhuǎn)換成電信號(hào)的器件,先接收球體在X軸、Y軸方向的轉(zhuǎn)動(dòng)位移量,再將此位移量轉(zhuǎn)換為電信號(hào)傳送給CY7C63813 芯片,CY7C63813芯片經(jīng)過數(shù)據(jù)分析處理后,通過PS/2 或USB 協(xié)議通信模塊轉(zhuǎn)換為相應(yīng)協(xié)議信號(hào),再通過相應(yīng)的接口連接器傳送到上位機(jī)的相應(yīng)接口。 球體在X軸、Y軸方向的轉(zhuǎn)動(dòng)位移量通過USB 接口或PS/2接口傳送給上位機(jī)后,就可實(shí)現(xiàn)控制光標(biāo)在屏幕上按照軌跡球球體轉(zhuǎn)動(dòng)而移動(dòng)的人機(jī)接口設(shè)備功能。
2 硬件電路設(shè)計(jì)
CY7C63813-SXC 控制器是基于enCoRe? Ⅱ內(nèi)核的8 位哈佛架構(gòu)微控制器,主頻可達(dá)到24MHz,內(nèi)部集成有晶體振蕩器、3.3V 電源調(diào)整器和8KB 的FLASH 存儲(chǔ)器等,芯片不需其他外部器件就可配置成USB 或PS/2 模式。CY7C63813 芯片集成了很多功能模塊,減少了其所需的周邊器件數(shù)量,降低了成本及應(yīng)用復(fù)雜度,并且其指令集針對(duì)PS/2 及USB 操作也進(jìn)行了優(yōu)化。
CY7C63813 芯片接收的是數(shù)字信號(hào),根據(jù)圖1 的硬件平臺(tái)組成可知,光耦將球體在X軸、Y軸方向上的移動(dòng)信號(hào)轉(zhuǎn)換為電信號(hào)后,傳送給主控制電路(其中的微控制單元MCU 就是CY7C63813 芯片)。但光耦轉(zhuǎn)換后的電信號(hào)并不是標(biāo)準(zhǔn)的數(shù)字信號(hào),而是類似正弦波的模擬信號(hào),此信號(hào)若直接傳送給CY7C63813 芯片,將難以被識(shí)別,需先將其整形為標(biāo)準(zhǔn)數(shù)字信號(hào)。文章采用施密特觸發(fā)反相器74HCT14D(以下簡(jiǎn)稱74HCT14D),先將光耦轉(zhuǎn)換后的電信號(hào)整形為標(biāo)準(zhǔn)數(shù)字信號(hào),再向CY7C63813 芯片發(fā)送。74HCT14D 是恩智浦半導(dǎo)體公司的一款用于波形和脈沖整形的芯片,具有施密特觸發(fā)動(dòng)作和六反相緩沖器,能將緩慢變化的輸入信號(hào)轉(zhuǎn)換為穩(wěn)定無抖動(dòng)的輸出信號(hào)[2]。
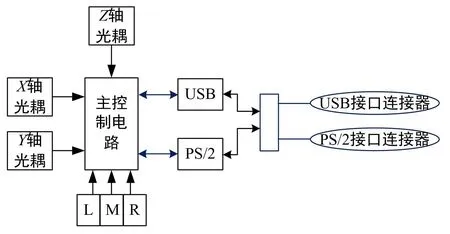
圖1 硬件平臺(tái)組成
軌跡球球體轉(zhuǎn)動(dòng)時(shí),帶動(dòng)光柵切割光耦(X軸、Y軸方向各有一個(gè)光耦,目前使用較多的光耦是美國(guó)威世公司的TCUT1300X01[3])的紅外發(fā)光二極管產(chǎn)生的紅外光線,光耦上的兩個(gè)光電晶體管探測(cè)器根據(jù)接收的紅外光線先后順序(根據(jù)先后順序的不同,可知光柵是順時(shí)針切割光線還是逆時(shí)針切割光線,即可知光柵也就是球體的移動(dòng)方向)產(chǎn)生相應(yīng)的電信號(hào)波形,并傳送給74HCT14D,經(jīng)過波形整形后,再傳送給MCU,MCU 對(duì)數(shù)據(jù)進(jìn)行處理分析(即判斷出球體在相應(yīng)軸向上的移動(dòng)量及方向)后,再通過相應(yīng)連接的主機(jī)接口將數(shù)據(jù)傳送給主機(jī)等。
3 固件程序設(shè)計(jì)
文章采用PSoC(Programmable System on Chip)芯片開發(fā)工具編制程序(PSoC Designer)[4]。PSoC芯片是一種將微控制器、邏輯電路等模塊進(jìn)行集成(集于一芯片上),并構(gòu)建成一個(gè)具備信號(hào)采集及I/O處理等功能的可編程型系統(tǒng)。PSoC Designer 是用于PSoC 芯片開發(fā)的工具,也是由Cypress 公司開發(fā)的,該工具支持C 語言等數(shù)種編程語言,是一款按模塊化方式進(jìn)行程序設(shè)計(jì)開發(fā)的工具。該工具內(nèi)含各種已設(shè)計(jì)好的程序模塊,使用時(shí),只要調(diào)用相應(yīng)的程序用戶模塊集成到主程序中,就可進(jìn)行程序設(shè)計(jì)了。
3.1 CY4623 例程及程序模塊引用分析
試驗(yàn)安裝的PSoC Designer 是5.4 版,固件設(shè)計(jì)是以CY4623 例程[5]為基礎(chǔ),增加并實(shí)現(xiàn)其他所需功能的算法程序代碼而完成的。用戶先下載并打開CY4623 例程,加載MSTIMER、PITIMER12、SPIM、PS2D、USB 五個(gè)用戶模塊,加載用戶模塊的同時(shí),其會(huì)將程序代碼、寄存器、定時(shí)器等模塊所需的參數(shù)自動(dòng)設(shè)置好,用戶只需調(diào)用已有的函數(shù)等便可實(shí)現(xiàn)相關(guān)開發(fā)。
(1)MSTIMER 用戶模塊:這是一個(gè)定時(shí)器(1ms 間隔的)用戶模塊,主要是給USB 用戶模塊進(jìn)行USB 掛起處理、HID 報(bào)告閑置時(shí)使用。
(2)PITIMER12 用戶模塊:這是一個(gè)12 位的可編程的計(jì)數(shù)寄存器用戶模塊,該模塊最高能達(dá)到24MHz 的源時(shí)鐘頻率,可實(shí)現(xiàn)計(jì)數(shù)值的自動(dòng)重新載入功能。
(3)SPIM 用戶模塊:這是將CY7C63813 芯片作為SPI 串行通信中的主設(shè)備的用戶模塊,用于SPI 串行通信。因?yàn)閰⒄誄Y4623 例程實(shí)現(xiàn)的是光電鼠標(biāo)設(shè)計(jì),Cypress 公司的主控IC 需要與光學(xué)感應(yīng)器進(jìn)行SPI 串行通信,因此要用到此用戶模塊。而自動(dòng)識(shí)別USB 和PS/2 接口軌跡球則無須進(jìn)行SPI 串行通信,其是將SPI 串行通信的相應(yīng)針腳當(dāng)作GPIO 接口來使用。但為了給后續(xù)設(shè)計(jì)光電鼠標(biāo)等其他產(chǎn)品奠定基礎(chǔ),文章仍然保留了CY4623 例程中的SPIM 用戶模塊和其程序代碼。
(4)PS2D 用戶模塊:這是PS/2 設(shè)備的協(xié)議用戶模塊,要將CY7C63813 芯片作為PS/2 鼠標(biāo)來使用,就必須調(diào)用此模塊。其內(nèi)部已建立好完整并經(jīng)過充分驗(yàn)證的PS/2 鼠標(biāo)協(xié)議和命令集,且其集成了USB SIE(串行接口引擎),可配合USB用戶模塊實(shí)現(xiàn)自動(dòng)識(shí)別USB 和PS/2 應(yīng)用程序的功能。
(5)USB 用戶模塊:這是USB 接口所需,要讓CY7C63813 芯片具有USB 鼠標(biāo)接口,就必須采用此模塊。其內(nèi)部已建立好完整且經(jīng)過充分驗(yàn)證的USB 協(xié)議和命令集,為控制端點(diǎn)建立好了符合USB 協(xié)議的底層驅(qū)動(dòng)程序,能對(duì)主機(jī)發(fā)出的請(qǐng)求進(jìn)行解碼及分配,支持 USB HID。并且可采用該模塊的USB 設(shè)置向?qū)ВO(shè)置USB 描述符等參數(shù),以生成符合要求的USB 程序代碼。當(dāng)然,使用者需要具備USB 相關(guān)的基本知識(shí),以便更好地進(jìn)行自動(dòng)識(shí)別USB 和PS/2 接口軌跡球的程序設(shè)計(jì)。
以上五個(gè)模塊就是進(jìn)行自動(dòng)識(shí)別USB 和PS/2 接口軌跡球的程序設(shè)計(jì)需要用到的PSoC Designer 自帶的用戶模塊,用戶將以上模塊進(jìn)行加載并設(shè)置好后,就建好了軟件開發(fā)基礎(chǔ)平臺(tái)。
3.2 CY4623 例程修改分析
CY4623 例程主要有以下三方面不滿足自動(dòng)識(shí)別USB 和PS/2 接口軌跡球的功能需求,使用者需要修改和增加相應(yīng)的程序代碼。
(1)自動(dòng)識(shí)別USB 和PS/2 接口軌跡球要求能自動(dòng)識(shí)別連接的接口類型,并能按照連接的相應(yīng)接口,將數(shù)據(jù)進(jìn)行轉(zhuǎn)換,實(shí)現(xiàn)相應(yīng)的通信功能,而CY4623 例程缺少此自動(dòng)識(shí)別的程序代碼。
(2)CY4623 例程實(shí)現(xiàn)的是光電鼠標(biāo)設(shè)計(jì),但自動(dòng)識(shí)別USB 和PS/2 接口軌跡球是要求識(shí)別球體在X軸、Y軸方向上的轉(zhuǎn)動(dòng)信息,以此實(shí)現(xiàn)控制光標(biāo)移動(dòng)的功能。
(3)因?yàn)椴煌庸誊壽E球項(xiàng)目的結(jié)構(gòu)安裝要求可能不同,自動(dòng)識(shí)別USB 和PS/2 接口軌跡球的安裝方向也不會(huì)只有一個(gè),如圖2 所示,在四個(gè)安裝方向下,都必須保證球體向上(或向下)移動(dòng)時(shí),能控制光標(biāo)向Y軸正方向(或負(fù)方向)移動(dòng)(球體向左或向右移動(dòng)同此理),必須滿足X軸、Y軸及其正方向可互換的要求。采用撥動(dòng)撥碼開關(guān)的方式,可調(diào)節(jié)X軸、Y軸及其正方向。但CY4623 例程不具備此功能。

圖2 軌跡球安裝方向示意(視角為從頂部觀看)
3.3 算法的具體實(shí)現(xiàn)分析
為了實(shí)現(xiàn)以上功能,文章研究相關(guān)算法,并根據(jù)其算法編制相應(yīng)的程序代碼,主要有PS/2 接口和USB 接口的自動(dòng)偵測(cè)算法,球體轉(zhuǎn)動(dòng)控制光標(biāo)移動(dòng)算法,X軸、Y軸及其正方向可互換功能的算法。
自動(dòng)識(shí)別USB 和PS/2 接口軌跡球基本功能的程序如圖3 所示,這也是軟件的程序流程圖。
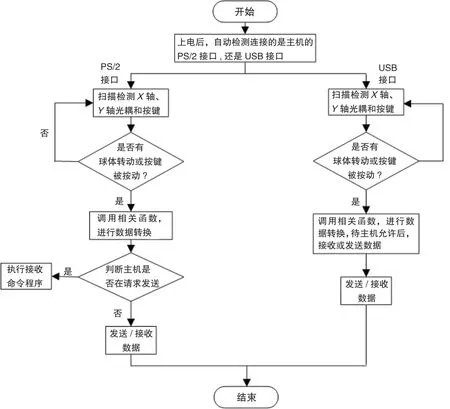
圖3 自動(dòng)識(shí)別USB 和PS/2 接口軌跡球基本功能
3.3.1 PS/2 接口和USB 接口的自動(dòng)偵測(cè)算法及程序?qū)崿F(xiàn)
試驗(yàn)通過深入研究PS/2 協(xié)議、USB 協(xié)議(尤其是USB HID 相關(guān)部分),并參考相關(guān)文獻(xiàn)資料發(fā)現(xiàn),PS/2 設(shè)備在上電后500ms 左右,才向主機(jī)發(fā)送BAT自檢成功代碼“0xAA”。因此,程序完全可以利用PS/2 設(shè)備發(fā)送BAT 成功代碼之前的500ms 左右的時(shí)間,檢測(cè)其連接的是主機(jī)的PS/2 接口,還是USB 接口。PS/2 接口的時(shí)鐘信號(hào)(CLOCK)和數(shù)據(jù)信號(hào)(DATA)通常是高電平信號(hào),而USB 接口的DATA+和DATA-信號(hào)則是高速差分信號(hào)。以此為基礎(chǔ)設(shè)計(jì)PS/2 接口和USB 接口的自動(dòng)偵測(cè)算法,算法流程見圖4。
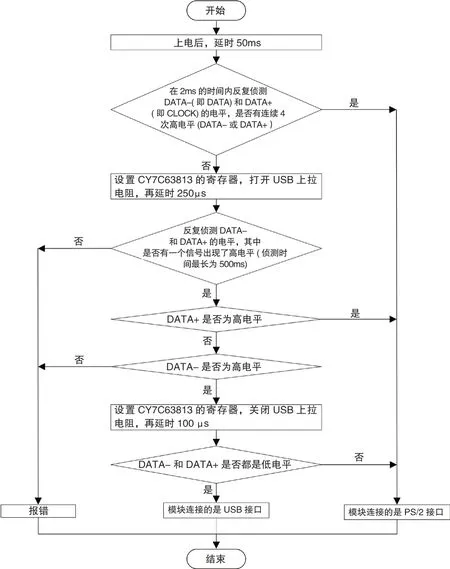
圖4 PS/2 接口和USB 接口的自動(dòng)偵測(cè)算法程序
(a)軌跡球上電后,延時(shí)50ms。程序代碼:
timer_delay_msec(50);//延時(shí)50ms。
(b)在2ms 的時(shí)間內(nèi)反復(fù)偵測(cè)DATA-(即DATA)和DATA+(即CLOCK)的電平,如果有連續(xù)4 次高電平(DATA-或DATA+),就是PS/2 接口,否則進(jìn)入步驟(c)。程序代碼:
INT8 samples = 4;//一個(gè)整數(shù)型[6]samples,數(shù)值為4。
while(temp1 != b1mscounter)
{if((PS2_PORT&PS2_PORT_BITS)&&(!--samples))
return(0);}//如果有連續(xù)4 次高電平,就返回0,判定為PS/2 接口。
(c)先通過設(shè)置CY7C63813 芯片的寄存器,打開USB 上拉電阻,再延時(shí)250μs,頻繁偵測(cè)DATA-和DATA+的電平,直到其中有一個(gè)出現(xiàn)高電平。若DATA+是高電平,便是PS/2 接口;若DATA-是高電平,便進(jìn)入步驟(d)。程序代碼:
USBXCR=USBXCR_ENABLE;//開啟上拉
time_delays_100_usec();time_delays_100_usec();timer_delay_10_usec();timer_delay_10_usec();timer_delay_10_usec();timer_delay_10_usec();timer_delay_10_usec();
//通過調(diào)用多個(gè)延時(shí)函數(shù),湊成延時(shí)250μs。
if( b1msflags & ONE_MSEC_FLAG )//采用if語句反復(fù)偵測(cè)DATA-和DATA+的電平,直到其中有一個(gè)信號(hào)出現(xiàn)高電平。無論哪個(gè)是高電平,都退出此if 語句。
(d)通過設(shè)置CY7C63813 的寄存器,關(guān)閉USB上拉電阻,再延時(shí)100μs,若DATA- 和DATA+都為低電平,就不是PS/2 接口,只能是USB 接口,反之亦然。程序代碼:
USBXC = 0x00;//關(guān)閉上拉
time_delays_100_usec();//延時(shí)100μs。
return(!(PS2_PORT & PS2_PORT_BITS));//CLOCK、DATA 所在的CY7C63813 的P1 端口的bit0(第0 位)、bit1(第1 位),分別與1 進(jìn)行與操作(即與0x03 進(jìn)行與操作),判斷這兩位是否為高電平,根據(jù)判斷結(jié)果,返回相應(yīng)的數(shù)值。
仔細(xì)測(cè)算實(shí)現(xiàn)以上算法的程序代碼的運(yùn)行所需時(shí)間,發(fā)現(xiàn)其小于500ms,符合PS/2 協(xié)議要求。以上算法的步驟(c)、步驟(d)中,延時(shí)的時(shí)間主要是配置寄存器后為使硬件運(yùn)行穩(wěn)定所需要的時(shí)間,與USB 協(xié)議、PS/2 協(xié)議都不沖突。
3.3.2 球體轉(zhuǎn)動(dòng)控制光標(biāo)移動(dòng)算法及程序?qū)崿F(xiàn)
因?yàn)镃Y4623 例程與軌跡球通過球體轉(zhuǎn)動(dòng)控制光標(biāo)移動(dòng)的實(shí)現(xiàn)方式不同,研究認(rèn)為可采用以下算法實(shí)現(xiàn)管控光標(biāo)的目的,程序流程見圖5。
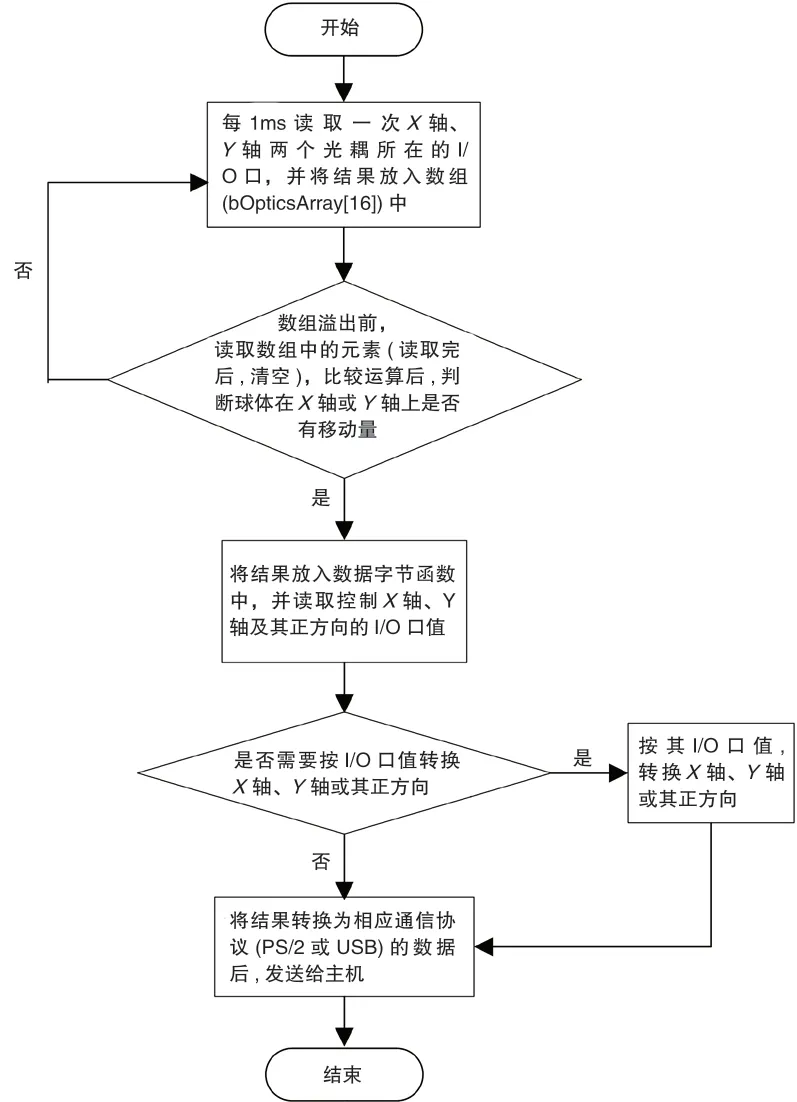
圖5 球體轉(zhuǎn)動(dòng)控制光標(biāo)移動(dòng)程序
(a)每1ms 讀取一次X軸、Y軸兩個(gè)光耦所在的I/O 口,并將結(jié)果放入一個(gè)有16 個(gè)元素的數(shù)組(bOpticsArray[16])中。程序代碼:
char bOpticsArray[16];//字符[7]數(shù)組有16個(gè)元素。
(b)讀取bOpticsArray[16]中的元素,并進(jìn)行比較運(yùn)算,轉(zhuǎn)換為光標(biāo)沿X軸、Y軸移動(dòng)的增減量,從而實(shí)現(xiàn)球體轉(zhuǎn)動(dòng)控制光標(biāo)移動(dòng)的功能。程序代碼:
void ProcessOptics(void)//此函數(shù)內(nèi)的程序代碼將數(shù)組中的元素按順序?qū)Ρ葦?shù)值。
3.3.3X軸、Y軸及其正方向可互換功能的算法及程序?qū)崿F(xiàn)
因?yàn)樵撟詣?dòng)識(shí)別USB 和PS/2 接口軌跡球?qū)?huì)被應(yīng)用到不同項(xiàng)目中,但不同項(xiàng)目的結(jié)構(gòu)安裝要求可能不同,軌跡球的安裝方向也不能唯一,可采用撥動(dòng)撥碼開關(guān)來調(diào)節(jié)X軸、Y軸及其正方向的方式實(shí)現(xiàn)此要求,此兩針腳分別為高電平或低電平,可實(shí)現(xiàn)四種組合方式,滿足模塊不同安裝要求。文章經(jīng)過研究,認(rèn)為可采用讀取球體轉(zhuǎn)動(dòng)控制光標(biāo)移動(dòng)算法及程序?qū)崿F(xiàn)中的數(shù)據(jù)字節(jié)函數(shù),并在此函數(shù)中,將X軸、Y軸數(shù)據(jù)的位置對(duì)調(diào)或數(shù)值取負(fù)值,實(shí)現(xiàn)X軸、Y軸及其正方向的相互轉(zhuǎn)換,從而實(shí)現(xiàn)X軸、Y軸及其正方向可互換功能。 程序代碼:
BOOL optical_get_report(OPTICAL_REPORT*report);//定義一個(gè)指針型結(jié)構(gòu)變量,實(shí)現(xiàn)X軸、Y軸及其正方向可互換的功能[8]。
4 試驗(yàn)與驗(yàn)證
文章將設(shè)計(jì)出的嵌入式軌跡球完成硬件調(diào)試和固件程序的編譯下載后,進(jìn)行功能性能測(cè)驗(yàn)。當(dāng)軌跡球被初次插入計(jì)算機(jī)USB 接口后,計(jì)算機(jī)右下方會(huì)彈出發(fā)現(xiàn)新硬件提示,且在設(shè)備管理器中可看到該USB 設(shè)備的基本信息;當(dāng)設(shè)備被插入計(jì)算機(jī)PS/2 接口后,重新啟動(dòng)計(jì)算機(jī)系統(tǒng),在設(shè)備管理器中會(huì)看到一個(gè)PS/2 Mouse 圖標(biāo)。在這兩種模式下進(jìn)行測(cè)試,軌跡球能實(shí)現(xiàn)穩(wěn)定的數(shù)據(jù)通信,光標(biāo)移動(dòng)靈活,左中右按鍵功能正常。測(cè)試其信號(hào)波形,發(fā)現(xiàn)無論是PS/2 接口,還是USB 接口,信號(hào)波形都較穩(wěn)定,且毛刺較少,沒有失真。
文章中的自研軌跡球,已用于龍芯、飛騰、Intel 至強(qiáng)及x86 等多種平臺(tái)的產(chǎn)品中,并配套過中標(biāo)麒麟、Linux、Windows Server、Windows 10/7/xp等多款操作系統(tǒng),以及這些平臺(tái)的USB、PS/2 接口,運(yùn)行情況良好,沒有出現(xiàn)過故障或兼容性問題。并通過了以下環(huán)境試驗(yàn)的驗(yàn)證,運(yùn)行情況良好,工作正常:
(1)低溫貯存:-55℃保溫24h,恢復(fù)常溫4h 后檢測(cè),溫變率≤3℃/min;
(2)低溫工作:-40℃保溫4h,工作運(yùn)行2h,溫變率≤3℃/min;
(3)高溫貯存:70℃保溫48h,恢復(fù)常溫4h后檢測(cè),溫變率≤3℃/min;
(4)高溫工作:60℃保溫4h,工作運(yùn)行2h,溫變率≤3℃/min。
5 結(jié)語
文章設(shè)計(jì)的基于CY7C63813-SXC 控制器的自動(dòng)識(shí)別USB 和PS/2 接口軌跡球研制測(cè)試完成后,能夠?qū)崿F(xiàn)預(yù)期功能,已投入生產(chǎn)并交付多個(gè)批次,可以在 USB 和PS/2 接口模式下自適應(yīng)工作,可以任意調(diào)節(jié)軌跡球的安裝方向,滿足不同應(yīng)用場(chǎng)景下的使用要求,也驗(yàn)證了采用PSoC 芯片開發(fā)計(jì)算機(jī)周邊設(shè)備的可行性。
猜你喜歡
中國(guó)自動(dòng)識(shí)別技術(shù)(2023年6期)2024-01-12 08:13:22
艦船科學(xué)技術(shù)(2022年22期)2022-12-13 03:39:42
艦船科學(xué)技術(shù)(2022年10期)2022-06-17 06:27:48
空間科學(xué)學(xué)報(bào)(2020年3期)2020-07-24 09:23:02
中國(guó)交通信息化(2019年7期)2019-10-08 09:04:40
水上消防(2019年3期)2019-08-20 05:46:08
西南交通大學(xué)學(xué)報(bào)(2018年6期)2018-12-18 02:23:20
特別健康(2018年3期)2018-07-04 00:40:18
發(fā)明與創(chuàng)新(2016年26期)2016-08-22 03:23:28
電測(cè)與儀表(2016年6期)2016-04-11 12:06:38
