水中管道智能巡檢機器人設(shè)計
2022-03-22 21:26:40李澤科陳越超
電子產(chǎn)品世界 2022年1期
李澤科 陳越超
摘 要:本系統(tǒng)主要利用單片機Arduino?Mega2560完成了水中管道巡檢機器人設(shè)計,其中主要包括TAMEGA? 2560主控制單元、OpenMV機器視覺模塊、三色LED小燈、L298N直流電機驅(qū)動模塊以及水壓傳感器和姿態(tài)傳感器。本系統(tǒng)主要通過OpenMV采集管道信息,通過姿態(tài)傳感器和水壓傳感器識別船身姿態(tài)和深度信息,并傳送給主控板,再通過PID算法控制電機,完成循跡功能和船身姿態(tài)控制;在將OpenMV識別信息傳送給主控板,完成標(biāo)志物識別以及報警功能。
關(guān)鍵詞:ATMEGA2560;OpenMV視覺模塊;L298N電機驅(qū)動模塊;PID算法
*基于項目:第七屆全國大學(xué)生工程實訓(xùn)大賽
水下管道巡檢機器人是水下作業(yè)中必不可少的設(shè)備,它在很大程度上幫助人類完成了一系列復(fù)雜的工作,提高了工作效率,解決了安全問題。但是,目前水下管道巡檢機器人實現(xiàn)的功能并不完善,為了解決準(zhǔn)確循跡以及標(biāo)記管道泄露和腐蝕位置問題,設(shè)計了一款用于水下管道智能巡檢機器人,它主要具有準(zhǔn)確循跡、識別與檢測功能,可以解決上述問題。本設(shè)計能夠在水下完成操作,當(dāng)水下機器人船身出現(xiàn)傾斜,會通過姿態(tài)傳感器反饋到主控板,顯示當(dāng)前機器人的姿態(tài)狀況。在下潛和上升過程中,通過水壓傳感器進行水壓檢測,在此過程中感知被測量的信息,并根據(jù)一定的規(guī)律轉(zhuǎn)換成可用信號;在水下管道檢測中,能夠發(fā)現(xiàn)管道表面腐蝕的地方并進行標(biāo)記,以便修復(fù)管道;在行走過程中,可對水下垃圾進行抓取回收,實現(xiàn)水下環(huán)境的清理與保護。
1 系統(tǒng)方案設(shè)計
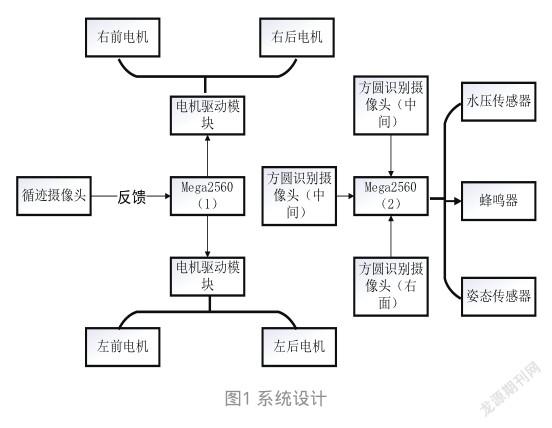
本設(shè)計主要由2塊ATMEGA2560單片機作為主控板,分別接收OpenMV、水壓傳感器和姿態(tài)傳感器的數(shù)據(jù)和信息,以及控制電機的轉(zhuǎn)動和標(biāo)志物的識別。啟動電源之后,循跡模塊和識別模塊開始工作,利用水壓傳感器與姿態(tài)傳感器實時檢測水壓和水下機器人的姿態(tài)狀況。本設(shè)計能夠更好地進行水下管道檢測,提高工作效率且便于操作。系統(tǒng)設(shè)計框圖如圖1所示。
2 系統(tǒng)硬件設(shè)計分析
2.1 主控板的選用
本設(shè)計選用Arduino Mega2560作為主控板;核心電路板設(shè)計采用USB接口,操作簡單。在燒制程序時,可直接利用USB接口下載程序。此外,主控板具有2種供電模式:USB直接供電或利用電池外部供電。與其他主控板不同,其I/O接口較多,包括16位PWM輸入口在內(nèi)有54位數(shù)字I/O口,其處理器核心為ATmega2560。此外,Arduino Mega2560已發(fā)展到最新版,在前2版的基礎(chǔ)上又增加了SDA、SCL(位置在AREF的左側(cè)),作用于接口I2C處。而shield可利用IOREF接口提供一個電壓參考,在串口的設(shè)計上,ATmega2560內(nèi)置的4路UART可以實現(xiàn)與外部的串口通信,并且USB上的虛擬串口可以通過 ATmega16U2去訪問串口0實現(xiàn)。
2.2 循跡以及識別模塊
在本設(shè)計中采用OpenMV作為循跡和標(biāo)志物識別的主要模塊。其具有較強的處理功能,能在水中敏銳地識別出管道,通過PID算法可以精準(zhǔn)的識別出管道路線,并識別標(biāo)志物所在的位置。其所有引腳均可承受5 V電壓,輸出電壓為3.3 V,在運行時可工作的范圍為-20~70 ℃。
2.3 水壓傳感器
在本系統(tǒng)中為了去實時的檢測水壓狀況而采用M10深度傳感器,此傳感器具有高分辨率,而且內(nèi)部設(shè)有高分辨率的I2C接口MS5837壓力傳感器;此傳感器設(shè)有VCC(紅線)、SCL(綠線)、SDA(白線)、GED(黑線)4個引腳,用于連接深度傳感器解算板,讀取深度傳感器的測量信息及其修正系數(shù);并與主控板形成串口輸出。
2.4 姿態(tài)傳感器
本系統(tǒng)利用JY90X傳感器檢測機器人在水下的姿態(tài)狀況。水下機器人通過讀取傳感器的三軸加速度、三軸角速度、三軸磁場的原始數(shù)據(jù),將數(shù)據(jù)實時反饋到主控板,然后使用自主研發(fā)的姿態(tài)動力學(xué)核心算法,通過結(jié)合高動態(tài)卡爾曼濾波融合算法表示機器人在水中行走時穩(wěn)定的三軸姿態(tài)角度。此外,傳感器采用高密度4層板設(shè)計,小巧方便;并且6軸或9軸算法可自由切換,同時可外接GPS模塊,實時定位水下機器人的位置。
2.5 L298N電機驅(qū)動模塊
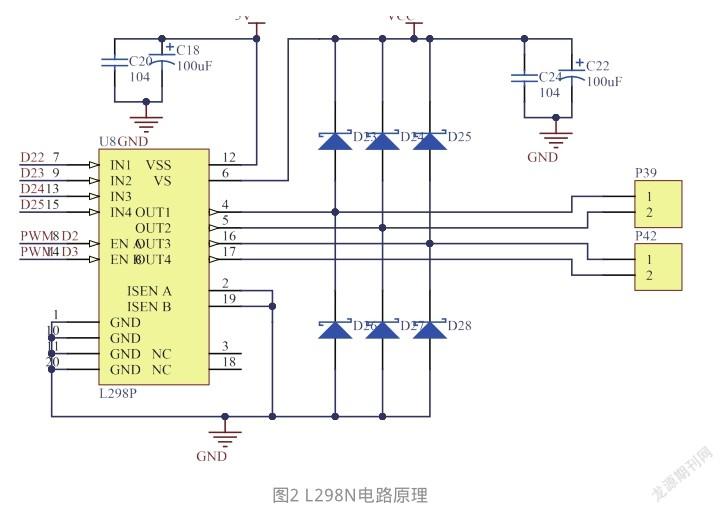
本設(shè)計采用L298N作為電機驅(qū)動模塊,如圖2所示。該電機驅(qū)動模塊內(nèi)部包含4通道邏輯驅(qū)動電路,它是一種兩相和四相電機的專用驅(qū)動器。電機可由L298N直接控制,而電機正反轉(zhuǎn)的驅(qū)動可通過主控芯片I/O輸入對其控制電平進行設(shè)定,操作步驟簡潔,穩(wěn)定性良好,可以滿足直流電機的大電流驅(qū)動條件。1個L298N模塊可同時控制2個直流減速電機的不同動作,在6~46 V的電壓范圍內(nèi),提供2 A的電流,且具有過熱自斷和反饋檢測功能。在本設(shè)計中主要利用L298N控制6個直流電動機來實現(xiàn)巡檢機器人的前進、轉(zhuǎn)彎及上下運動,使巡檢機器人實現(xiàn)循跡及深水區(qū)淺水區(qū)檢測的功能。
3 軟件分析
3.1 PID算法及其控制
由于在水中要適應(yīng)多種復(fù)雜的環(huán)境,在本設(shè)計中,水下機器人要按照要求通過指定的線路,這就要求水下機器人具有精準(zhǔn)的前進方向。所以通過PID控制回路算法保證水下機器人在前進過程中能夠沿著要求的線路航行,并完成任務(wù),以提高工作效率。主控板通過接受姿態(tài)傳感器的數(shù)據(jù)反饋,進而控制電機速度。當(dāng)水下機器人偏離管道,控制器發(fā)出指令信息,調(diào)節(jié)前進方向,使之回到主管道。
4 程序設(shè)計
本系統(tǒng)利用不同語言對不同模塊編程。主程序部分利用特有編程軟件Arduino編程,使編譯環(huán)境更加簡單、方便,各種功能的調(diào)用十分便捷,各種庫函數(shù)的調(diào)用也十分方便。OpenMV機器視覺模塊利用Python編程軟件,通過程序控制OpenMV機器視覺模塊將采集到的視覺信息顯示到電腦上。然后調(diào)節(jié)PID算法使OpenMV模塊傳回的信息更加精確。
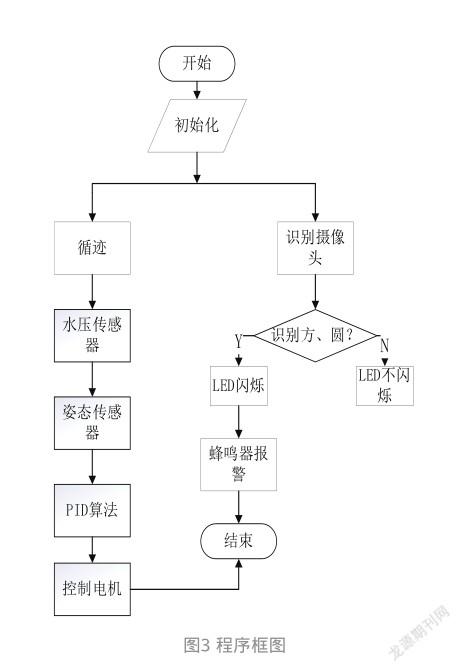
本系統(tǒng)程序設(shè)計包含主程序部分、L298N電機驅(qū)動子程序和OpenMV循跡物塊識別子程序。開始先進行系統(tǒng)初始化,然后按下開始按鍵,整個系統(tǒng)進入工作狀態(tài),接著調(diào)用OpenMV子程序使水下機器人尋找到指定線路,然后開始循跡。在前進過程中,利用水壓傳感器檢測水壓,同時根據(jù)姿態(tài)傳感器檢測機器人的姿態(tài)狀況及時調(diào)整方向,通過PID算法控制L298N電機驅(qū)動實現(xiàn)機器人的前進、轉(zhuǎn)彎。在循跡行走中,OpenMV子程序?qū)崟r將外界信息傳遞給主控板,巡檢機器人在檢測到不同標(biāo)志物時通過三色LED小燈進行不同顯示。當(dāng)識別的物體為正方形時,LED小燈顯示為綠色;當(dāng)物體為圓形時LED小燈顯示為紅色。程序框圖如圖3所示。
5 結(jié)束語
隨著社會的進步與發(fā)展,水下巡檢機器人在未來應(yīng)用會非常廣泛,在水中作業(yè)方面將起到很大作用。本文主要研究水下機器人的控制系統(tǒng),獲取相應(yīng)的結(jié)論:水下機器人的行走及物塊識別都需要依靠智能控制進行反饋;在很大程度上解決了水中作業(yè)的問題,降低了工人巡檢的難度,提高了工作效率。
參考文獻:
[1]史志晨.水下作業(yè)機器人聲吶圖像目標(biāo)跟蹤研究及水面監(jiān)控系統(tǒng)設(shè)計[D].鎮(zhèn)江:江蘇科技大學(xué),2020.
[2]徐敬成.無刷直流電機遠距離調(diào)速控制系統(tǒng)研究[D].株洲:湖南工業(yè)大學(xué),2019.
[3]宋濱鵠.基于視頻的多目標(biāo)識別研究[D].天津:天津科技大學(xué), 2017.
[4]趙開理.基于單片機設(shè)計直流電機控制系統(tǒng)[D].南京:南京郵電大學(xué),2017.
[5]王蕭.基于嵌入式Linux的水中機器人設(shè)計[D].天津:天津大學(xué), 2014.
[6]陳呂洲.Arduino程序設(shè)計基礎(chǔ)[M]北京:北京航空航天大學(xué)出版社,2014.
[7]趙加敏,徐玉如,雷磊.用于水下機器人智能路徑規(guī)劃的仿真器的建立[J].系統(tǒng)仿真學(xué)報.2004(11):2448-2450.
[8]成巍,蘇玉民,秦再白,等.一種仿生水下機器人的研究進展[J].船舶工程.2004(1):5-8.
[9]張露凝,于洋,張航,等.水下機器人檢測系統(tǒng)在北京市南水北調(diào)工程的應(yīng)用[J].北京水務(wù),2020(6):31-37.
[10]張興興,王偉,陳世明,等.基于人工側(cè)線的相鄰仿生機器魚感知研究[J].測控技術(shù),2016(10):33-37.
2483500783294
