智能工廠自動化產線電氣控制系統優化設計及應用
2022-03-21 08:09:56吳昊趙旭陳磊毛金銘高顯進朱秋實張曉東
汽車工藝師 2022年3期
關鍵詞:設備
吳昊,趙旭,陳磊,毛金銘,高顯進,朱秋實,張曉東
一汽解放汽車有限公司 長春 130011
目前汽車制造業由自動化線體向智能化線體轉型。智能化的生產線關鍵在于電氣控制系統設計的合理性,對軟件、硬件的設計,需要打破傳統的思路,有良好的數據基礎及合理規劃方可對智能化產線做基礎支撐。智能化工廠的核心數據來源于自動化底層的數據,通過與MOM/MES或車間級中控實時交互的數據,使其了解產線信息并下達相關生產及物流調度指令。
電氣規劃方案
根據工藝規劃方案,獲得自動線裝備線規劃平面圖,根據平面圖及數字化規劃方案需要,分配相應網絡層級、網絡拓撲結構以及考慮智能化工廠的數據量和時效性,在數據接口復雜的情況下,確定相關核心元器件的類型及數量。
1.網絡層級劃分
自動化率較高的傳統車間在PLC上一層搭載安東或SCADA層,實現數據的上傳即完成網絡層級的構架搭建。目前國內在智能化、數字化轉型的背景下,規劃的網絡構架定義較為豐富,從上到下有決策層、管控層、感知層以及設備層等定義(也有定義為工廠級、車間級或現場級),無論IT與OT如何融合與定義,最底層的均為以可編程邏輯控制器(PLC)為核心的設備層或現場級,這是智能化工廠的基礎和源頭。如何劃分現場層網絡和上層工業互聯網的構架關系,是自動線電氣控制系統的重要因素。
以某焊裝車間的網絡層級為例(見圖1),車間包含27套PLC及相關附屬設備,上述設備經過三層網絡交換機的VLAN功能實現隔離,使得設備層與中控層實現了分層。分層的關鍵在于對設備層相應聯網設備的保護,在IoT融合的大趨勢下,希望實現“一網到底”的網絡規劃。初衷是希望獲取到最底層數據的相關信息,實時查看底層設備狀態。但如果不做分層隔離,任意一個MOM或中控系統的端口通過一個自動獲取IP地址的終端接入到OT網絡層中,極易導致IP地址沖突,將某一個底層設備的網絡通信毀掉。基于上述問題,在做智能工廠的網絡規劃時,需對網絡層級進行劃分,并通過防火墻或VLAN等相關功能實現隔離,避免因非生產必要IP臨時進入底層網絡而發生的地址沖突,導致底層設備斷網影響產線停滯。
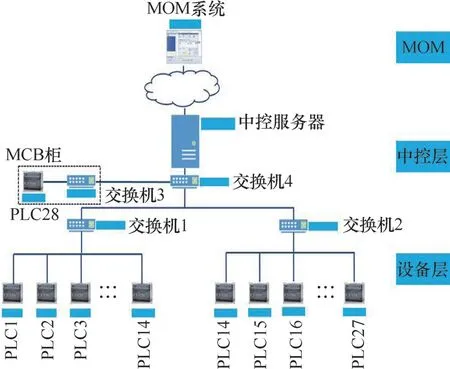
圖1 某焊裝車間網絡規劃層級
2.設備層總線結構
傳統的設備層總線結構,Profibus、Interbus、CClink和Devicenet基本占據了汽車制造業的核心總線市場。隨著工業互聯網的大數據采集,對安全信號等級要求更高,逐步在改造或新建的自動化線中實現Profinet總線結構。與傳統的總線結構相比,Profinet網絡總線的數據量以及傳輸速度是傳統總線不可比擬的。目前Profinet總線有光纖和銅纜兩種接線方式,如果在產線初期規劃階段對使用年限、節拍的要求較高且有大數據傳遞的需求,使用Profinet光纖的通信方式是最優選擇。
光纖傳遞特點如下。
首先,Profinet光纖的數據傳遞穩定性比銅纜傳輸更高,網絡節點不會在線纜上形成不同的共模電壓電平或共模瞬變,在大電流以及高壓降的情況下,光纖自帶電氣隔離功能,避免了強電流及強電壓對總線傳輸信號的影響,實現電磁屏蔽。
其次,在數據的傳輸距離上,光纖傳遞在不需要增加中繼站的情況下可完成數據的傳輸。但需要注意的是,由于光纖受自身材質的限制,在機器人或一些運動機構上使用光纖IO模塊與PLC進行通信時,需注意動態彎曲半徑一般不得小于光纜外徑的20倍(理論值),靜止彎曲半徑大于光纖外徑的15倍(理論值),在實際的工況下此數值更高,所以在動態的機械結構外掛光纖IO模塊時需結合仿真驗證其動態彎曲半徑。使用靜態光纖時需考慮靜態彎曲半徑,在圖樣設計時進行準確的計算及做出適當的預留。在現場布線時,需考慮現場線槽的轉彎角度。
以某總裝車間的一套可編程邏輯控制器為例。(見圖2),PLC的控制柜下屬現場級變頻器、柜體內變頻器(IP20防護等級)、現場級IO模塊、柜內IO模塊(IP20防護等級)、RIFD以及與其他控制系統交互的PN-PN Coupler,總線拓撲結構的劃分較為清晰,某一類設備形成拓撲結構的一個分支,如現場級變頻器及其IO模塊即在拓撲結構里形成一支路,操作按鈕箱形成一支路。此種設計方式在圖樣的設計以及現場故障的查詢中較為清晰,可迅速識別出某一類設備出現故障,且程序上的相關IP地址、輸入輸出點規則更清晰,便于查找相關點位。

圖2 某總裝車間機械化設備層總線規劃
3.交互信息接口
某套自動線電氣控制系統,在原自動化的信息接口交互上,基本是與其他電控系統通過自動線體間的交互實現數據通信。但隨著智能化工廠的由信息驅動線體的概念,所交互的信號來自不同的系統。
以某立體庫信號交互為例。當PLC系統與自動入庫、出庫系統進行線體間的信號交互,由于涉及安全、無延遲傳輸的同步通信信號,所以需通過PN-PN Coupler進行信號傳遞。但立體庫系統需要與多系統實現車型、生產計劃的校驗,此類信號為異步通信信號,則需要通過OPC-UA協議進行數據的傳遞。通過上位系統間的判斷發送放行與接收指令,從而控制立體庫的出入庫,因此在某一套電控系統的規劃設計中,要充分考慮相關其接口的預留及交互系統的規劃,安全信號、到位信號及其他實時傳遞的同步信號應考慮通過Profinet總線進行傳遞。生產計劃、型號比對等校驗信息通過OPC-UA的形式進行傳遞,預留足夠的網絡端口及相關安全策略部署。
硬件設計
基于電氣控制系統的規劃設計,針對網絡的相關數據采集及控制要求需要對PLC本體及相關外設進行選型。在滿足大數據采集的基本要求下,除PLC的選用應考慮多網卡多接口以外,其他的智能電表、水流量、氣流量、加注、溫度相關的數據傳感器應具備數據采集與上傳的功能。
1.PLC選型設計
如電氣控制系統帶有各種復雜的機器交互邏輯且包含復雜的運算邏輯,具備分布式網絡控制系統,在選型上優先考慮模塊式大型PLC。在整車廠的自動線電氣方案設計過程中,基本使用大、中型PLC,此類PLC的運算速度、邏輯處理能力極強,可以滿足各種線體的復雜控制邏輯。根據智能化、大數據的采集要求,在選用大、中類型PLC的同時要考慮網絡隔離分層的關鍵要素,故應選用自帶雙IP地址的PLC,或者使用獨立IP地址的PLC接入三層管理型網絡交換機。交換機所組成的網絡柜中增加防火墻,在大數據的采集背景下,務必考慮工控安全因素。
2.智能電表
智能電表對能源的采集、線體能耗分析起到重要作用,傳統的自動化線體內均使用指針式的能耗電表,此種電表僅能以人工目視的方式進行數據的識別。一般的智能電表具備強抗干擾性,工作環境溫度范圍-25~+60℃,能夠適應汽車四大工藝相關的工廠及車間粉塵、噪聲、振動等惡劣的工作環境。智能電表用于自動化線體內的測量范圍一般在10~264V(相電壓),最大測量范圍:415V(相電壓),功耗≤0.05VA(單相),精度達到RMS 0.2%,分辨率達到0.01V。具備獨立的網絡接口,RS-485或RJ45等網絡接口類型,通信速率一般在600~38 400bps。
3.射頻識別技術
RFID是 Radio Frequency Identification 射頻識別的縮寫,作為焊裝、涂裝、總裝車間數字化的一個熱門應用點,其載碼體內可以承載各種生產信息并可實現車體跟蹤功能,被廣泛應用于各大整車廠。但是RIFD的合理使用,且如何符合實際的工作情況是電氣控制系統規劃設計時需考慮的重要因素。
(1)環境溫度 以某涂裝車間為例。在電泳及面漆噴涂烘干的區域,車體進入到烘干室內后,溫度達到180℃,并且在烘干室內持續保持停留50min,反復的高溫、冷卻對載碼體本身的性能要求極高。目前國內的載碼體廠商對于高溫的承受性能尚未達到國外頂級產品的水平,如對上述工況無法適應,將導致頻繁地更換載碼體且全車間的信息系統將處以斷點狀態。如果智能工廠的自動化線體以生產計劃、車型識別為驅動原則,耐高溫并預留設備層決策功能,上述信息丟失情況下,電氣控制系統應具備設備層手工狀態確認功能。
(2)電磁干擾及靜電干擾 在焊裝的高速輥床線體內、涂裝面漆的噴漆線、總裝的非接觸供電的AGV,對RFID的使用應做到電磁屏蔽及靜電干擾。焊裝工藝線體內一般在滑撬的下方安裝載碼體,為保證不受焊接過程的大電流產生的電磁干擾,線體內的滑撬與車身、載碼體與滑撬本體均需要做到電磁隔離;涂裝面漆的噴涂過程中,根據涂裝工藝要求使用靜電噴涂的方式,載碼體考慮不被面漆覆蓋的同時,仍需要考慮機器人噴槍與載碼體的距離,避免靜電干擾,影響數據的存儲;在總裝的非接觸供電AGV的附近,對載碼體位置的擺放尤為關鍵,此非接觸供電產生的電磁干擾嚴重影響讀寫距離。
(3)抗金屬干擾 在汽車行業中,載碼體的安裝環境基本是在各種車體、鋼結構以及運動的機械裝備上。選擇抗金屬載碼體時,讀寫頭的擺放位置也需要進行現場實測后再確定可行性方案,因受到車間復雜工作環境的影響,產品手冊數據與工況測試數據相比差異較大。當選擇非抗金屬的載碼體時,須確保非抗金屬載碼體與側向金屬間至少保持150mm的隔離間距,以確保非抗金屬載碼體的正常讀寫操作不會受到側向金屬的影響。綜合汽車制造車間復雜的工作環境下,RFID的選型應考慮抗金屬型RFID。
4.機器人控制系統
在高節拍的機器人自動化線體中,機器人在傳統自動化線體設計時,作為PLC的從站并控制其自身以及其下屬設備。作為搬運、焊接、噴涂、擰緊及打刻等工藝工作內容,是智能化、自動化、柔性化必不可少的一個組成部分。圖3所示為焊接機器人及其下屬設備的網絡拓撲圖,從站種類較為復雜,具體包括RIP、閥島、換槍盤、焊槍等外部設備。在這種復雜的拓撲下,如何將數據采集至PLC或直接通過機器人組網將信息上傳至相關系統是電氣規劃的關鍵。
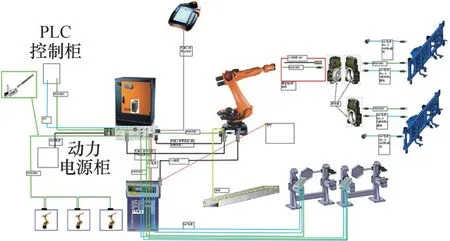
圖3 焊裝機器人及其下屬設備的網絡拓撲
機器人作為PLC從站的情況下,需要梳理PLC與機器人的IO信號表,將需求數據通過機器人上傳至PLC,再由PLC傳遞至管理層系統。如果機器人直接接入至車間設備層網絡的系統,數據量相比于上傳至PLC,再由PLC向上層網絡專遞更豐富,機器人直接傳遞至中控層級,可包括焊點數量、機器人各軸本體的傳感器數據、焊鉗壓力,修磨器狀態、修磨后補償值及RIP相關數值等,減少了PLC采集、運算、傳遞的通信負載。
軟件設計
如果把控制系統的硬件稱之為骨骼,則控制系統的軟件即為神經。目前電氣控制系統的編譯軟件取決于PLC選型品牌,但程序框架應滿足大數據采集及各工藝內容的情況下實現程序框架的統一,便于上層系統的數據采集及信息讀取,以及生產線的維護。
1.程序框架設計
在普通程序設計時,各工藝PLC程序框架文件夾按照如圖4所示結構進行設計。

圖4 PLC程序框架
其中,在“04_工位時序”文件夾內,編寫各工藝所需的控制邏輯;“08_屏幕顯示”編寫人機交互程序,用于HMI的相關操作,根據各工藝邏輯復雜程度在相應的程序框架文件夾下進行編寫添加相應的功能。在程序的框架內容中,“10_中控數據”明確上傳中控數據的具體位置,并在相應的數據存儲塊中規范數據采集的內容,并根據畫面程序,編寫至指定位置,便于程序的查找以及問題識別。
安全程序在自動化工控層面是核心,在數據采集、校驗并對生產控制邏輯進行判斷時,安全程序要滿足可采集不控制的原則,在安全程序內不應使用OPC協議的控制點,以及普通的過程變量點。
2.人機交互界面設計
傳統的人機交互程序包括線體平面圖、故障報警信息、手動/自動模式切換、機器人維修位相關操作等,但是對于設備層參數信息的設置,以及產品信息的編輯受限于PLC以及總線數據帶寬的限制,無法做到在人機交互系統進行相關的參數設置,導致電氣工程師需配置工作站的情況下,安裝各類軟件實現對設備進行參數的配置。基于上述情況,通過擴大人機交互上位機界面的功能,盡可能實現數據可視化、參數設置化,建立人機交互界面標準。如圖5所示,通過“回原點”和“一鍵備份”按鈕,將傳統機器人系統示教器上的相關功能移植到人機交互界面端,在某些人機交互界面的設計中對變頻器除可手動進行運行外,變頻器的軟限位、速度值寫入,除初始化的相關參數設置外,其他運行狀態設置變量均可以通過人機交互界面進行設置,改變傳統使用變頻器的軟件進行設置的方式。

圖5 機器人人機交互界面
數據采集范圍
無論預測性維護、大數據分析、自學習功能還是AI智能的相關決策,基礎的數據來自底層PLC的DB塊數據,對于程序中過程變量的種類、顆粒度將直接影響上層數據的分析與決策。
1.數據采集種類
采集相關線體設備數據,須確保數據的實時性和穩定性。控制層網絡要求采用統一的總線協議,所有帶控制器的設備需至少配備一個標準工業以太網接口。常規數據的采集(見表1),如運行中時間統計計算出可動率;缺料狀態累計計算經數據分析對物料的前置期做相應的調整;各工位過點信息計算出整車從焊裝至總裝下線的全生產制造周期,便于評估銷售訂單的承接及生產計劃的排產。
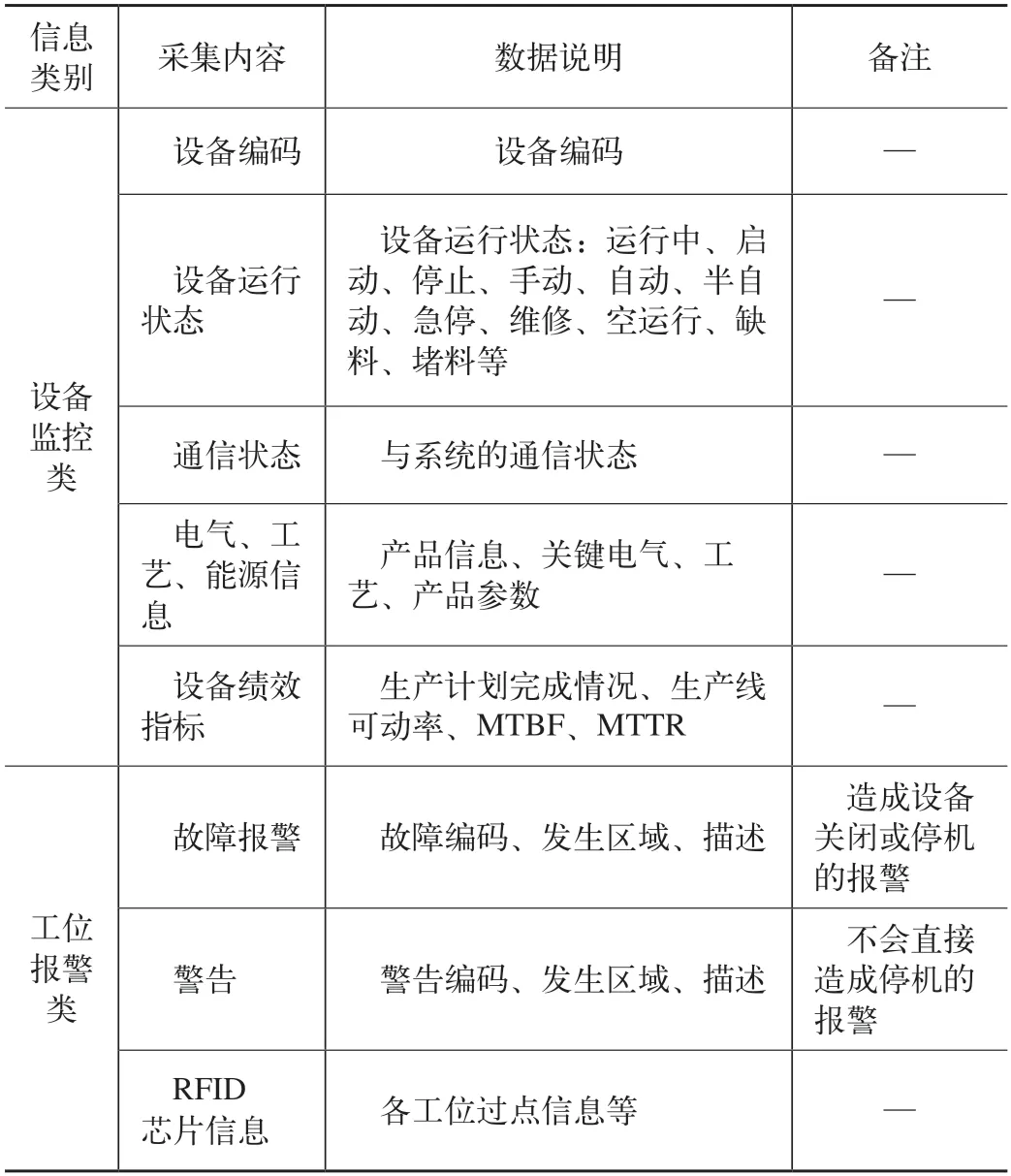
表1 各類設備數據采集概況
2.數據的顆粒度
PLC上傳的數據來自于程序的邏輯指令及其中間變量,而支撐大數據分析及決策的數據均來自上述PLC內,程序邏輯的嚴謹性及中間過程變量的顆粒度將對上傳數據質量起到至關重要的作用。目前隨著智能制造的推廣,衍生出預測性維護、裝備智能監控等新概念,如果按照產線集成化的思路規劃相關預測監控系統,在復雜的線體內,不建議使用外加傳感器的方式對線體相關裝備進行檢測分析,較為行之有效的方式還是將裝備本體的數據進行挖掘開發。某旋轉機構使用的變頻器上傳PLC數據見表2,通過對表中觸發數據時間間隔統計,從而預測運動狀態的穩定性及裝備本體的狀態。實際電流與實際速度搭建數學模型,實現對運動狀態的監控。通過底層較高顆粒度的數據上傳,為中控層乃至更高層級的系統做理論依據及數據基礎。
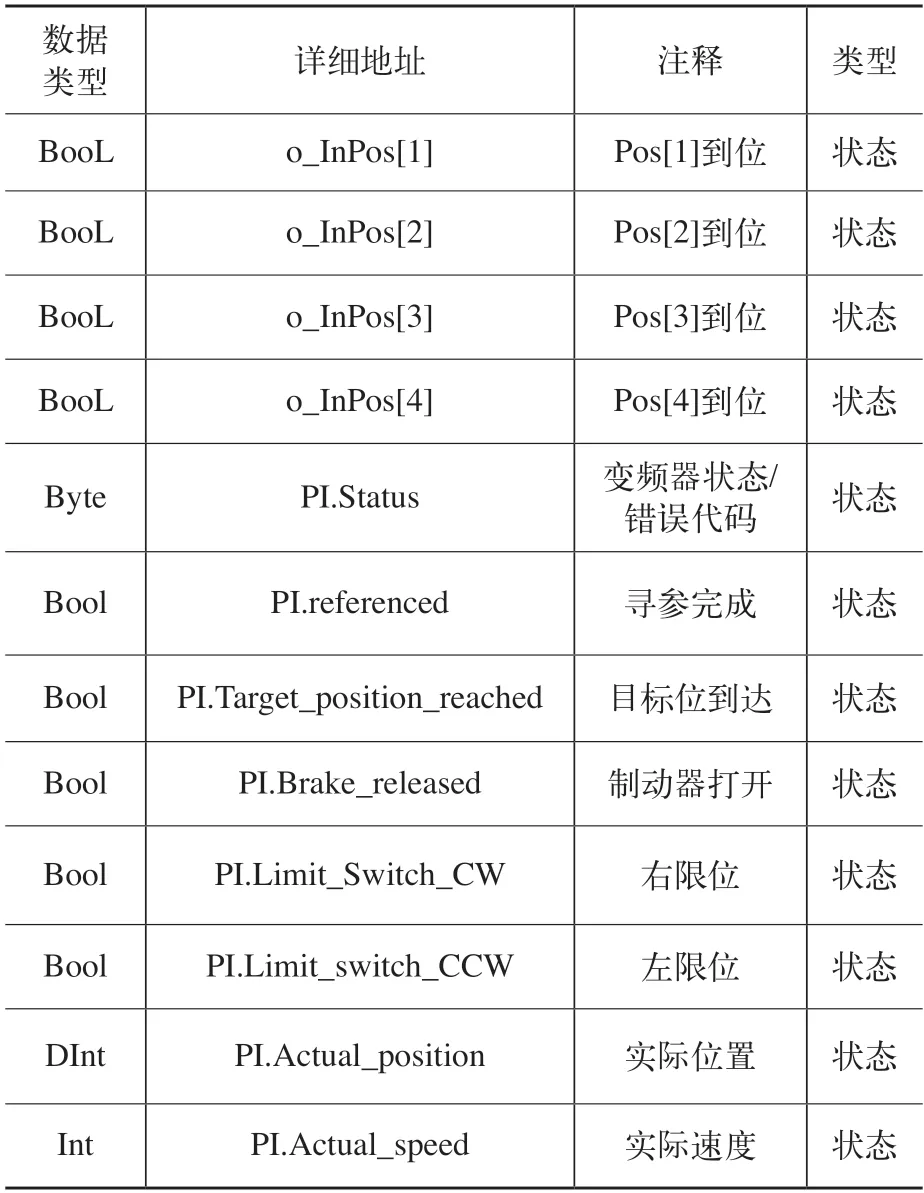
表2 變頻器上傳PLC數據

(續)
結語
智能工廠的搭建來自于數據的驅動,數據源自于自動線電氣控制系統的PLC,其底層設備的數據接口及程序的完整性,將對工廠智能化水平起到至關重要的作用。將自動化電氣控制系統優化,將為上層系統提供足夠的數據基礎以及決策依據。對于IT層所需要的數據應該充分考慮其需求,將PLC不能搭建的數學模型上傳至IT端,由其建立相關的數學模型及運算邏輯,挖掘深層的數據信息和產線信息。但是在底層設備的控制邏輯上,與IT端應保持相互校驗、互不控制的原則,以OPC通信為媒介實現大數據上傳的同時確保自動化線體的穩定運行。
上述電氣控制系統在焊裝、涂裝、總裝新建及改造項目中應用,通過打通信息流,取消了部分人工確認的功能,實現了節省10余人,數據信息的上傳及產線數據的分析,各車間線體可動率平均提升3%,并為后續產線的智能決策分析提供數據基礎。
本文通過新建工廠及數字化轉型背景下產線改造過程中獲得的經驗及發現的問題,進行了總結歸納,對未來智能工廠的自動線電氣控制系統設計提供參考,并以智能工廠發展為方向逐步完善優化設計思路,為汽車智能制造的全面轉型提供支撐。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
