新型四自由度3T1R并聯機器人機構運動學分析與優化設計
2022-03-21 06:00:20彭紅梅陳亞陸彩滿劉艷梨吳洪濤
包裝工程 2022年5期
彭紅梅,陳亞,陸彩滿,劉艷梨,吳洪濤
新型四自由度3T1R并聯機器人機構運動學分析與優化設計
彭紅梅1,陳亞1,陸彩滿1,劉艷梨2,吳洪濤2
(1.江蘇安全技術職業學院 機械工程學院,江蘇 徐州 221011;2.南京航空航天大學 機電學院,南京 210016)
針對自動化生產線分揀需求,提出一種新型四自由度的三平移一轉動(3T1R)并聯機器人機構。根據方位特征集設計理論驗證并聯機器人機構的運動性質。利用機構的構型特點建立運動學方程模型,對其進行位置正解和逆解的分析,通過數值法搜索得到并聯機器人機構的工作空間圖形和轉動能力等高線圖。同時分析并聯機器人機構的雅可比矩陣X以及奇異性。最后以工作空間最大化作為適應度函數,基于遺傳算法對機構結構尺寸進行最優化分析。該機構操作空間具有規則形狀、無空洞、較大的特點,優化后的并聯機器人機構工作空間性能提升45%。操作空間內運動靈活性較好,優化后工作空間性能得到顯著改善。在電子包裝自動化生產線搬運分揀領域具有較好的應用前景。
3T1R;并聯機器人機構;方位特征集;工作空間;轉動能力;奇異位形
三平移一轉動(3T1R)并聯機器人機構因其具有精度高、承載能力強、剛度大等諸多優點,廣泛應用于分揀、包裝及搬運等工程實際領域[1-2]。3T1R動并聯機器人機構可通過改變動平臺的姿態角使得工件姿態得以調整。在物料分揀、自動搬運、零件裝配等應用場景中具有較好的應用前景[3-4]。
近年來3T1R并聯機器人機構的分析與綜合研究一直是學者們研究的重點。李宏偉等[5]以平行四邊形機構構成的3TIR并聯機器人機構為研究目標,介紹支鏈的構成和運動副的分布情況,根據理論方法計算機構自由度,與根據方位特征集計算得到的自由度結果完全一致。利用機構的運動特點建立運動學方程數學模型,完成運動學位置逆解計算,并提出一種確定工作空間準確的邊界形狀新型數值搜索法。該方法具有原理簡單、搜索效率高、邊界精度高等優點。此外,研究工作空間體積與結構參數尺寸的影響關系。GHAFFARI等[6]提出了一種3T1R并聯機器人機構,該機構一般可用于渦輪葉片的加工,該機構具有部分解耦、結構簡單、對稱分布、控制容易的特點,并完成位置正解和位置逆解分析,并通過算例分析驗證其正逆解可靠性,同時建立機構的動力學模型,并通過計算證明了機構在工作空間中不存在運動奇異的情況。利用幾何方法對機構的工作空間進行了分析,得到了機構執行器在給定任務下所需的行程長度。沈惠平等[7]針對三平移一轉動拓撲結構復雜所引起的新機型的研究和開發困難的問題,通過降低機構的耦合度來降低機構運動學分析難度,并通過具體案例分析降耦的全過程。暢博彥等[8]設計實現了整周回轉運動的三平移一轉動并聯機器人機構,所提出的機構可通過平面二維移動放縮機構模塊化裝配,為了便于計算利用降耦設計原理對機構進行構型優化設計,以達到降低耦合度但不改變運動性質的效果。建立運動方程計算位置正逆解,圖形化分析工作空間和轉動能力,并通過討論奇異性出現的可能情況,以此來指導開發人員調整設計參數避免這類問題出現,并討論參數變化對操作空間影響趨勢,分析機構執行末端的轉動最大角度得到轉動能力圖譜。
受文獻[9]啟發,設計一種新型的3T1R并聯機器人機構,它具有空間三平移和繞著軸轉動的運動特點,機構的結構類型為2PRPU,即每條支鏈由2條完全相同的PRPU支鏈構成,基于方位特征集設計理論驗證構型為2PRPU的3T1R并聯機器人機構性質,并建立3T1R并聯機器人機構的運動學模型。以一組算例詳細分析并聯機器人機構的操作空間指標,研究不同高度下對轉動能力的影響,最后以實際性能需求為目標模型對該機構進行參數的優化設計。
1 并聯機器人機構簡介
1.1 機構模型

圖1 3T1R并聯機器人機構的結構

圖2 xOy面投影的結構簡圖
1.2 機構的拓撲特性分析

圖3 3T1R并聯機器人機構的三維模型
(1)
1)通過支鏈的方位特征集,將支鏈1、2設置為一個獨立運動回路,計算得到的位移方程數:
(2)
2)分析構型為2PRPU的3T1R并聯機器人機構動平臺參考點的POC集:
Pa(1-2)=b1b1=
(3)
3)自由度計算為:
(4)
4)機構的耦合度是評價機構運動控制難易程度的特性參數,耦合度越高,機構控制越難實現,耦合度分析需要根據支鏈的約束度來計算,已知主動副的數目為4,分析得到SOC的約束度:
0 (5)
(6)
綜上所述的拓撲結構特性分析,驗證3T1R并聯機器人機構具有空間、、方向移動,且沿著動平臺軸線轉動的特性。另外,耦合度=0說明機構具有解耦性,控制運動易實現,位置分析不復雜。不需要通過數值搜索法來計算正解,可直接推導得到正解解析式。
2 位置分析
2.1 位置正解分析
OP(7)
(8)
根據式(8)推導出位置正解見式(9)。
(9)
根據式(9)分析表明,構型為2PRPU的3T1R并聯機器人機構的位置正解并不復雜,結果清晰簡單,且整個計算過程容易,根據輸入位移能得到4組執行末端位姿解。
2.2 位置逆解分析
(10)
3 奇異分析
3.1 機構雅克比矩陣
(11)
3.2 逆解奇異性分析
3.3 正解奇異性分析
4 工作空間分析
工作空間形狀可能直接影響機構應用范圍[10]。當機構的操作空間內部不連續時,會使得應用受到極大約束限制,因此研究機構時,分析工作空間尤為關鍵。
4.1 可達工作空間分析
極限搜索法搜索并聯機器人機構的工作空間需要根據建立的運動方程模型進行求解,下面選擇尺寸參數分析并聯機器人機構工作空間,具體參數值見表1。
表1 算例的結構參數值

Tab.1 Structural parameters of an example

圖4 3T1R機構可達工作空間圖
由圖4分析可得,可達工作空間形狀是對稱圖形,沿著每個投影面的圖形是規則的,邊界光滑飽滿且內部無空洞的情況。工作空間三維圖沿著投影面邊界形狀為長方形,且沿著=0對稱分布;沿著投影面邊界形狀也是長方形,且沿著=0對稱分布。沿著投影面邊界呈對稱的半橢圓形狀,且沿著=0對稱分布。該并聯機器人機構整體的運動范圍相對較大,可滿足高速輕載自動化生產線搬運分揀作業需求,可應用于電子包裝、食品醫藥、現代物流分揀等領域。
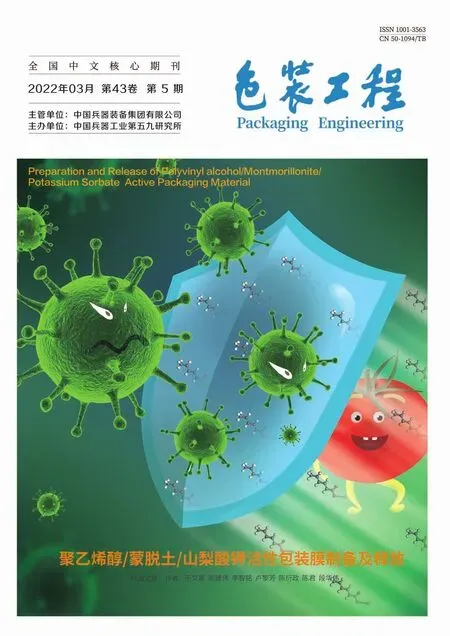
4.2 定姿態工作空間分析
不同姿態角的定姿態工作空間大小和形狀存在差異[11]。分析姿態角為30°、60°、90°下的定姿態工作空間見圖5—7。
由圖5—7對比分析可得,3種定姿態(30°、60°、90°)工作空間三維圖基本相同,姿態角對工作空間投影面影響比較大,對軸方向幾乎沒影響。2種工作空間的形狀基本相同,僅大小上存在差異。姿態角對工作空間形狀的影響不夠顯著。
5 并聯機器人機構轉動能力分析
由于3T1R并聯機器人機構具有三平移一轉動的運動特性,動平臺可沿著軸轉動,轉動能力也是衡量3T1R并聯機器人機構性能優劣的重要評價指標。轉動能力指工作空間內動平臺執行末端轉動的最大范圍[12],因此,研究轉動能力對指導設計并聯機器人機構的開發極其重要[13]。為了簡化計算,通過分析不同高度下所對應截面的下可達工作空間內動平臺執行末端轉動的范圍。分別取0、0.5、1、1.3等高度,對比分析操作空間內的并聯機器人機構的轉動能力。不同截面()下,轉動能力等高線圖見圖8。
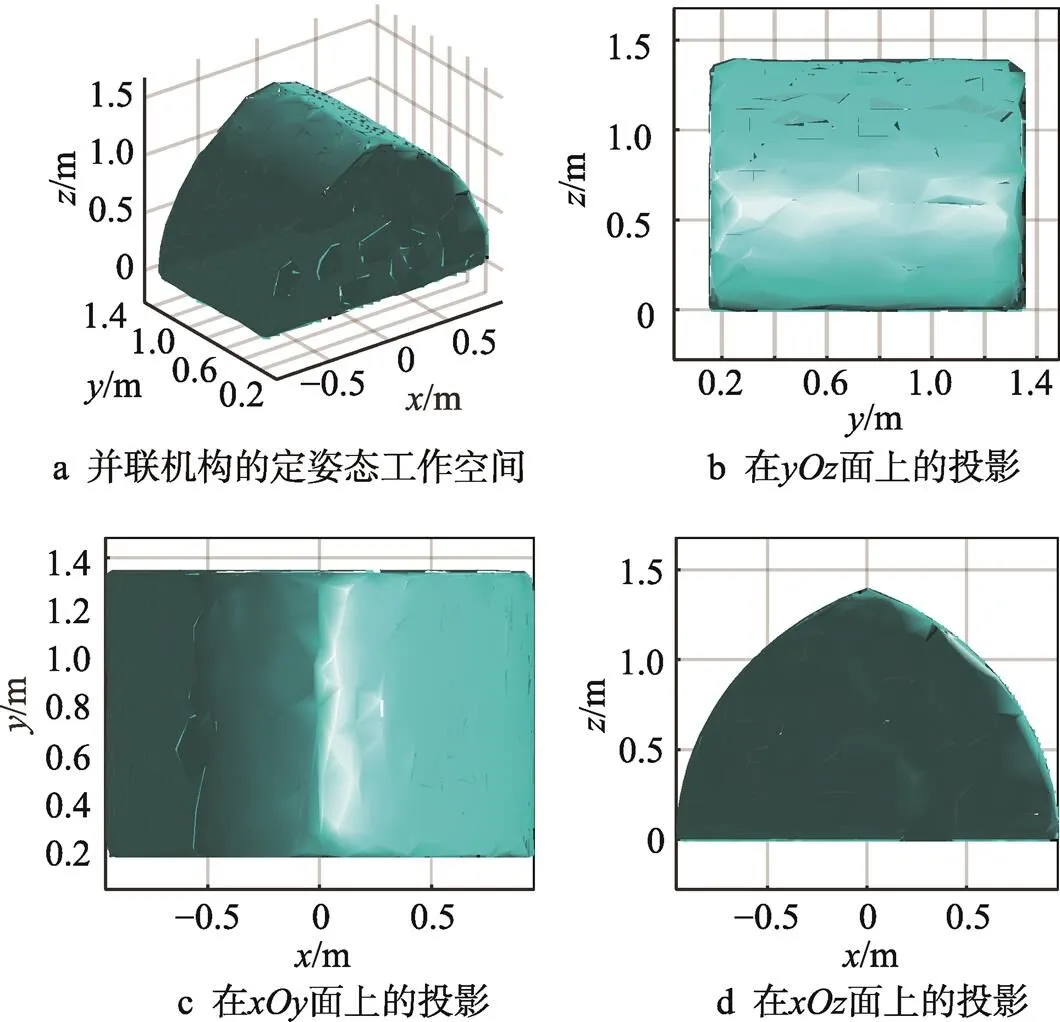
圖5 姿態角q=30°時的定姿態工作空間
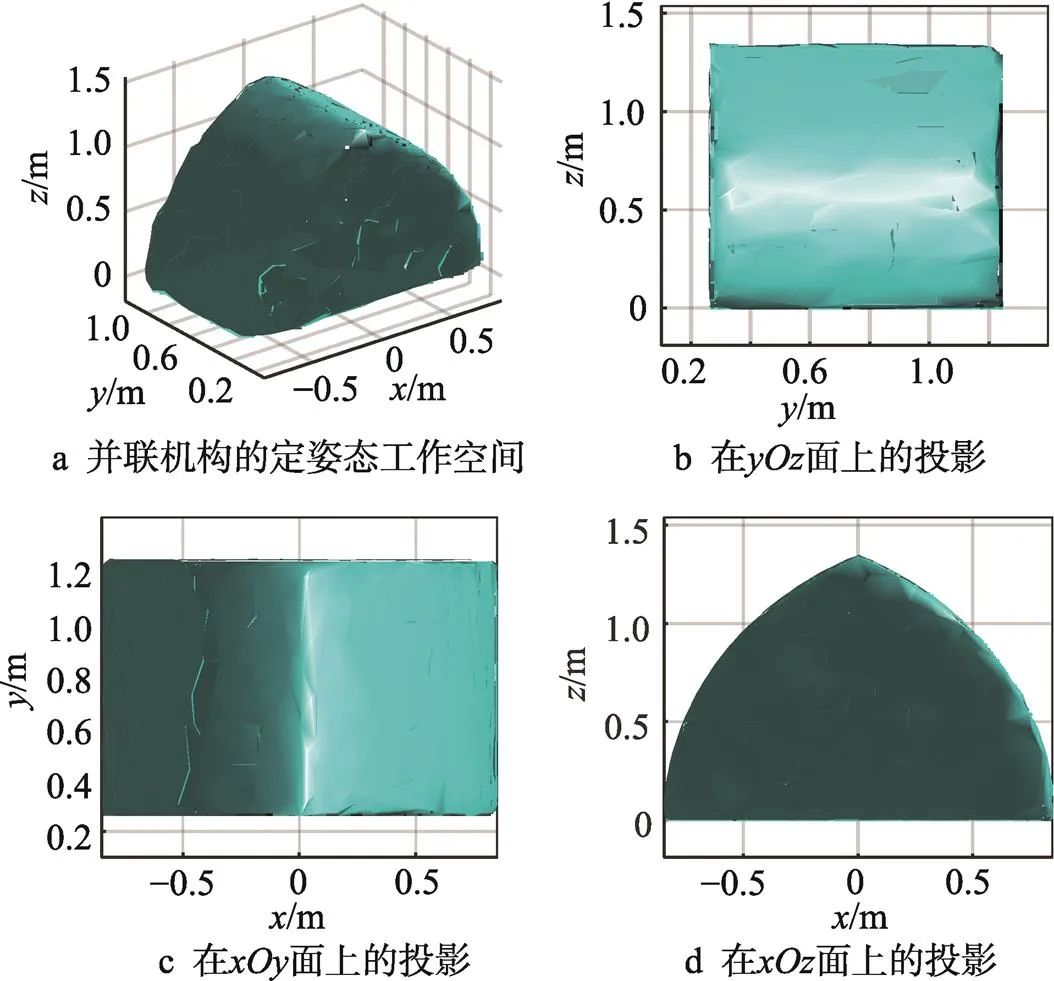
圖6 姿態角q=60°時的定姿態工作空間
圖7 姿態角q=90°時的定姿態工作空間
6 結構參數優化
6.1 模型優化的建立和算法選擇
參數優化指在結構參數的范圍內,通過優化方法搜索得到一組最佳工作性能最優化參數值,因此,以可達工作空間大小作為優化目標模型,分別對動、靜平臺的半徑、,移動副最大移動距離,移動副最大移動距離等參數優化。優化過程是指給定、、、的范圍,搜索出滿足優化函數的最優解。參數優化范圍選擇參考文獻[14],適應度函數優化模型為:
條件
文中選擇模擬自然進化過程搜索遺傳算法進行參數最優化設計[15],算法選擇的參數進化代數為40,種群大小為40,適應度計算采用排序法,選擇隨機遍歷抽樣算法,重組方式選擇分散重組,交叉概率為0.6,變異概率為0.008。
6.2 優化算例
根據6.1節提出的目標函數模型對其進行仿真優化,通過Matlab軟件得到優化仿真圖見圖9—10。
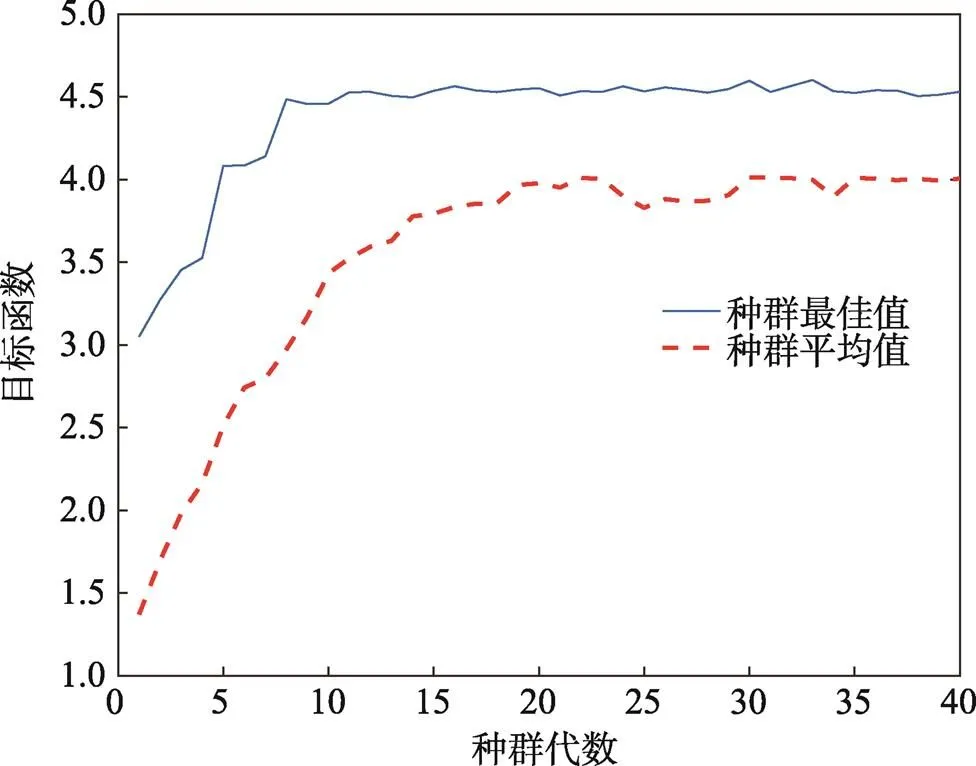
圖9 最佳目標函數變化曲線

圖10 設計參數變化曲線
由圖9—10分析可得,迭代次數為15左右時已經得到最優目標=4.5m3。最優化對應的尺寸的參數、、、1、2分別為0.7、0.8、1.2、1.6 m。
根據優化后的參數值得到此參數下的三維圖,進行對比分析,優化后的可達工作空間見圖11。對比分析表明,優化后邊界形狀光滑豐滿、對稱分布。較優化前工作空間(=3.09 m3)大;優化后操作性能改善顯著,較優化前的性能提升45%。
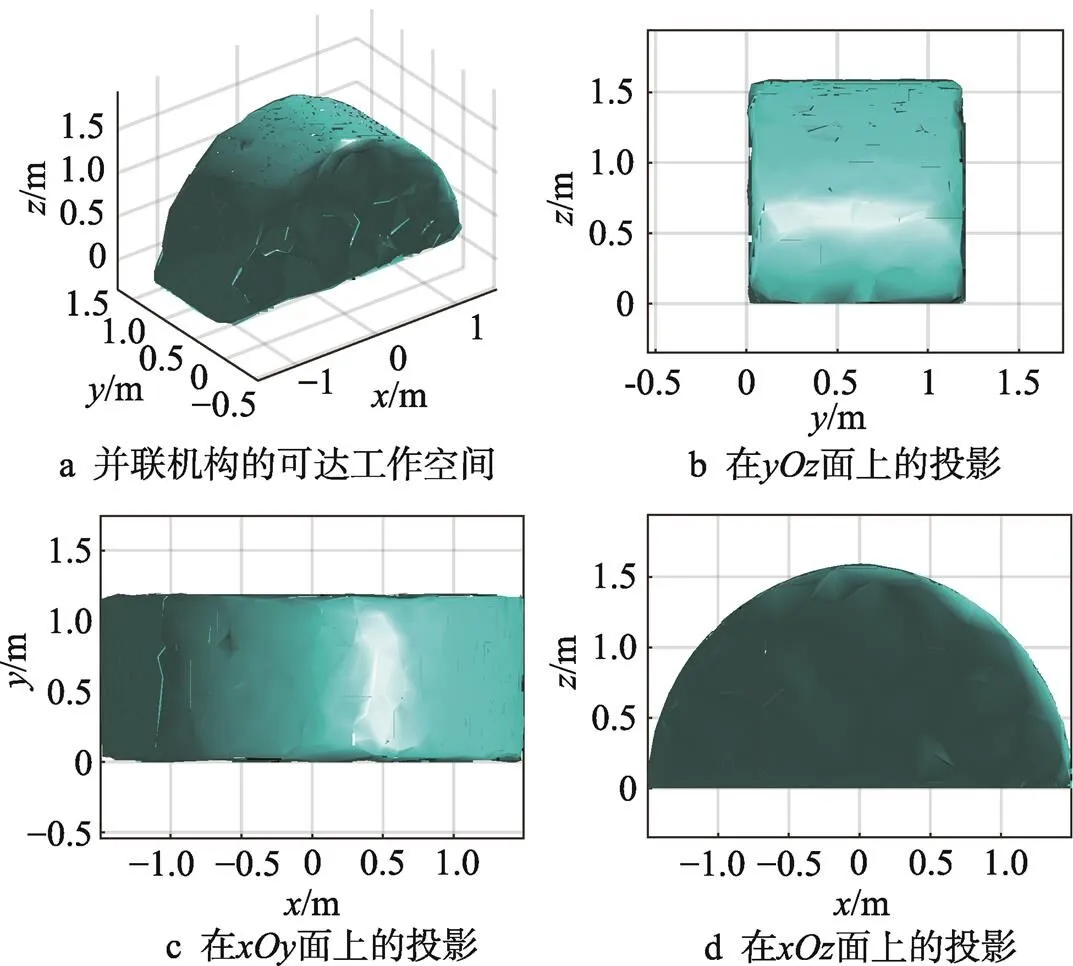
圖11 優化后的工作空間
7 結語
1)設計一種構型為2PRPU的3T1R并聯機器人機構,根據方位特征方程的理論推導出機構具有空間三維移動且沿著軸的運動性質。
2)完成位置正解和逆解分析。結果表明,并聯機器人機構最多存在4組正解和4組逆解。
4)算例分析機構得到較好的工作空間性能,工作空間形狀對稱分布,內部無空洞情況,臨界位置光滑飽滿。另外,分別計算為0、0.5、1、1.3等高度下的轉動能力。分析表明,隨著越大,所對應的轉動能力逐漸減小。
[1] 洪俊坤, 車林仙, 杜力, 等. 2-(CRR)2R結構降耦并聯機構及其運動學分析[J]. 機械傳動, 2019, 43(4): 51-60.
HONG Jun-kun, CHE Lin-xian, DU Li, et al. 2-(CRR) 2R Parallel Mechanism with Decoupling-Reducing Structure and Its Kinematics Analysis[J]. Journal of Mechanical Transmission, 2019, 43(4): 51-60.
[2] 沈惠平, 張震, 楊廷力, 等. 3T1R并聯機構結構降耦設計與運動學分析[J]. 農業機械學報, 2017, 48(10): 380-389.
SHEN Hui-ping, ZHANG Zhen, YANG Ting-li, et al. Structure Coupling-Reducing Design and Kinematics Analysis of 3T1R Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(10): 380-389.
[3] ZHANG Xing, YANG Ming-xing, MU De-jun, et al. Unified Formulas of Constrained Jacobian and Hessian Matrices for 3T1R Overconstrained Parallel Mechanisms[J]. Mechanics Based Design of Structures and Machines, 2021, 1: 1-15.
[4] BRIOT S, BONEV I A. a New 3T1R Decoupled Parallel Manipulator for Pick-and-Place Applications[J]. Mechanism & Machine Theory, 2010, 45(5): 707-721.
[5] 李宏偉. 4自由度3T1R并聯機構工作空間與轉動能力分析[J]. 機械設計與研究, 2020, 36(5): 75-80.
LI Hong-wei. Workspace and Rotation Capacity Analysis of 4-DOF 3T1R Parallel Mechanism[J]. Machine Design & Research, 2020, 36(5): 75-80.
[6] GHAFFARI H, PAYEGANEH G, ARBABTAFTI M. Kinematic Design of a Novel 4-DOF Parallel Mechanism for Turbine Blade Machining[J]. The International Journal of Advanced Manufacturing Technology, 2014, 74(5-8): 729-739.
[7] 沈惠平, 強恒存, 曾氫菲, 等. 基于結構降耦的一類低耦合度新型3T1R并聯機構的拓撲設計[J]. 中國機械工程, 2017, 28(10): 1163-1171.
SHEN Hui-ping, QIANG Heng-cun, ZENG Qing-fei, et al. Topological Design for a Class of Novel 3T1R Parallel Mechanisms with Low Coupling Degree Based on Coupling-Reducing[J]. China Mechanical Engineering, 2017, 28(10): 1163-1171.
[8] 暢博彥, 李曉寧, 金國光, 等. 具有整周回轉能力的3T1R并聯機構運動學分析[J]. 農業機械學報, 2019, 50(7): 406-416.
CHANG Bo-yan, LI Xiao-ning, JIN Guo-guang, et al. Kinematics Analysis of Novel 3T1R Parallel Manipulator with Full Rotational Capability[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(7): 406-416.
[9] 吳存存, 楊桂林, 陳慶盈, 等. 四自由度2PPPaR并聯機構運動學及性能分析[J]. 機械工程學報, 2018, 54(3): 36-45.
WU Cun-cun, YANG Gui-lin, CHEN Qing-ying, et al. Kinematic and Performance Analysis of a 4-DOF 2PPPaR Parallel Manipulator[J]. Journal of Mechanical Engineering, 2018, 54(3): 36-45.
[10] 崔馬茹, 武建德, 李瑞琴, 等. 3-URPR并聯機構的逆運動學與可達工作空間分析[J]. 包裝工程, 2020, 41(21): 196-201.
CUI Ma-ru, WU Jian-de, LI Rui-qin, et al. Inverse Kinematics and Reachable Workspace of 3-URPR Parallel Mechanism[J]. Packaging Engineering, 2020, 41(21): 196-201.
[11] 馬振東, 馬春生, 米文博, 等. 基于2-RPS/UPRS并聯機構的自動分揀機運動分析[J]. 包裝工程, 2021, 42(1): 157-162.
MA Zhen-dong, MA Chun-sheng, MI Wen-bo, et al. Kinematics Analysis of Automatic Sorter Based on 2-RPS/UPRS Parallel Mechanism[J]. Packaging Engineering, 2021, 42(1): 157-162.
[12] 沈惠平, 許正驍, 許可, 等. 低耦合度且部分解耦的3T1R并聯機構設計與分析[J]. 農業機械學報, 2019(2): 373-383.
SHEN Hui-ping, XU Zheng-xiao, XU Ke, et al. Design and Analysis for Partially Decoupled 3T1R Parallel Mechanism with Low Coupling Degree[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019(2): 373-383.
[13] 劉勇, 許勇, 宋偉, 等. 對稱3T1R并聯機構構型設計與位置分析[J]. 機械設計與研究, 2019, 35(2): 55-59.
LIU Yong, XU Yong, SONG Wei, et al. Configuration Design and Position Analysis of Symmetrical 3T1R Parallel Mechanisms[J]. Machine Design & Research, 2019, 35(2): 55-59.
[14] 李旭, 羅霞, 羅成, 等. 基于離散蒙特卡洛的一種3T1R并聯機構工作空間分析[J]. 機械, 2020, 47(5): 27-32.
LI Xu, LUO Xia, LUO Cheng, et al. A Discrete Monte Carlo Approach to Workspace Analysis of a Type of 3T1R Parallel Mechanism[J]. Machinery, 2020, 47(5): 27-32.
[15] 李偉, 何鵬舉, 楊恒, 等. 基于粗糙集和改進遺傳算法優化BP神經網絡的算法研究[J]. 西北工業大學學報, 2012, 30(4): 601-606.
LI Wei, HE Peng-ju, YANG Heng, et al. An Effective Backpropagation Algorithm for Optimizing BP Neural Network Based on Rough Set and Modified Genetic Algorithm[J]. Journal of Northwestern Polytechnical University, 2012, 30(4): 601-606.
Kinematics Analysis and Optimization Design of a New Four Degree of Freedom 3T1R Parallel Robot Mechanism
PENG Hong-mei1, CHEN Ya1, LU Cai-man1, LIU Yan-li2, WU Hong-tao2
(1.Department of Mechanical Engineering, Jiangsu College of Safety Technology, Xuzhou 221011, China; 2.School of Electrical and Mechanical, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The work aims to propose a novel 4-DOF 3-translational-1-rotational (3T1R) parallel robot mechanism to meet the needs of sorting in automatic production line. The kinematic properties of the parallel mechanism were verified according to the design theory of orientation feature set. Based on the configuration characteristics of the mechanism, the kinematics equation model was established, and the forward and inverse position solutions of the mechanism were analyzed. The workspace figure and rotation capacity contour map of the parallel mechanism were obtained by numerical method. At the same time, the Jacobian matrixXand singularity of the parallel mechanism were analyzed. Finally, with the maximum workspace as the fitness function, the structure size of the mechanism was optimized based on genetic algorithm. The operating space of the mechanism had the characteristics of regular shape, no cavity, large size, and good motion flexibility in the operating space. The workspace performance of the optimized parallel mechanism was increased by 45%. The kinematic dexterity in the workspace is good. The performance of the workspace is significantly improved after optimization. It has a good application prospect in the field of electronic packaging automatic production line handling and sorting.
3T1R; parallel mechanism; position and orientation characteristics; workspace; rotation ability; singularity
TB486;TH122
A
1001-3563(2022)05-0188-08
10.19554/j.cnki.1001-3563.2022.05.026
2021-06-10
國家自然科學基金(51975277)
彭紅梅(1977—),女,江蘇安全技術職業學院講師,主要研究方向為機械自動化、機械優化設計。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
現代企業(2015年2期)2015-02-28 18:45:09
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44