基于空間變形的無人機(jī)路徑規(guī)劃算法研究
2022-03-20 09:07:04肖志慧劉久富王志勝賴幸君
彈箭與制導(dǎo)學(xué)報(bào) 2022年6期
肖志慧,劉久富,王志勝,賴幸君,林 磊
(1 南京航空航天大學(xué)自動(dòng)化學(xué)院,南京 210016;2 國(guó)家無線電監(jiān)測(cè)中心檢測(cè)中心,北京 100041)
0 引言
隨著智能技術(shù)的發(fā)展,無人機(jī)(unmanned aerial vehicle,UAV)表現(xiàn)出的功能更加豐富,在農(nóng)業(yè)植保、城鎮(zhèn)規(guī)劃、商業(yè)宣傳、防火救災(zāi)等各個(gè)方面的應(yīng)用均表現(xiàn)出色[1]。但應(yīng)用場(chǎng)景復(fù)雜化后也帶來了工程倫理問題和頻發(fā)的安全問題。
對(duì)于無人機(jī)實(shí)現(xiàn)任務(wù)的過程來說,其核心是飛行路徑的規(guī)劃。無人機(jī)的路徑規(guī)劃,簡(jiǎn)單來說,旨在設(shè)計(jì)一條安全的運(yùn)動(dòng)軌跡,完成從起始點(diǎn)飛向目標(biāo)點(diǎn)的任務(wù),盡量避免事故的發(fā)生[2]。目前,國(guó)內(nèi)外對(duì)路徑規(guī)劃算法的研究,可以按照環(huán)境是否已知進(jìn)行分類。對(duì)環(huán)境完全已知的情況,基于建立的全局地圖模型,路徑規(guī)劃算法有A*算法、隨機(jī)采樣法、蟻群算法(ACO)、粒子群算法(PSO)、人工魚群算法(AFSA)、螢火蟲算法(FA)等群智能算法;對(duì)環(huán)境不完全已知的情況,有源于物理學(xué)思想的人工勢(shì)場(chǎng)法、基于行為法、滾動(dòng)窗口法以及與傳統(tǒng)算法相結(jié)合的聯(lián)合算法[3-6]。
吳振等[7]在環(huán)境已知情況下,為了獲取最短最優(yōu)航路,提出了一種改進(jìn)的遺傳算法,通過標(biāo)定適應(yīng)度值,引入精英保留策略,避免陷入局部最優(yōu),從而實(shí)現(xiàn)航路最優(yōu);焦慶宇等[8]考慮人群密度風(fēng)險(xiǎn),提出了改進(jìn)的A*算法,并利用卷積神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)人群密度,從而實(shí)現(xiàn)無人機(jī)實(shí)時(shí)的路徑規(guī)劃;田廣鍵等[9]將傳統(tǒng)人工勢(shì)場(chǎng)法分層,并加入分段函數(shù)和復(fù)合引力場(chǎng),顯著提高了規(guī)劃效率,彌補(bǔ)了曲率過大的問題;張瀚等[10]提出了聯(lián)合深度確定性策略梯度算法(DDPG)和人工勢(shì)場(chǎng)法的混合算法,通過干預(yù)DDPG選擇動(dòng)作時(shí)的策略來規(guī)化環(huán)境不完全已知時(shí)的可靠路徑,但損失了收斂速度,動(dòng)態(tài)環(huán)境下效果一般。近年來計(jì)算機(jī)技術(shù)快速發(fā)展,深度學(xué)習(xí)和強(qiáng)化學(xué)習(xí)也越來越多地應(yīng)用于無人機(jī)路徑規(guī)劃[11]。于盛[12]基于馬爾科夫決策過程,用強(qiáng)化學(xué)習(xí)算法進(jìn)行優(yōu)化,提出了基于MADDPG的多機(jī)路徑規(guī)劃算法,效果顯著。Liu等[13]針對(duì)無人機(jī)的移動(dòng)邊緣,提出了一種基于QoS的動(dòng)作選擇策略,優(yōu)化運(yùn)動(dòng)軌跡,收斂速度明顯提高。
當(dāng)前路徑規(guī)劃方法已經(jīng)比較成熟,可以同時(shí)考慮最短長(zhǎng)度和最小威脅。然而,城市環(huán)境下低空飛行的無人機(jī)還需要綜合考慮安全風(fēng)險(xiǎn)。在環(huán)境越來越復(fù)雜的當(dāng)下,工程倫理下的人員安全問題越來越重要。若忽略飛行中的安全風(fēng)險(xiǎn),會(huì)給無人機(jī)的實(shí)際飛行過程帶來隱患。文中綜合考慮了路徑的平滑性、可實(shí)現(xiàn)性和安全性,首先,在地圖中同時(shí)添加安全裕度和風(fēng)險(xiǎn)信息;然后,在基于空間變形算法的基礎(chǔ)上,對(duì)灰狼算法生成的全局路徑進(jìn)行二次變形,使其更為安全。根據(jù)目標(biāo)點(diǎn)在原灰狼算法產(chǎn)生的全局路徑中的分段比例,在起點(diǎn)終點(diǎn)之間的連線上確定控制點(diǎn),控制點(diǎn)與目標(biāo)點(diǎn)一一對(duì)應(yīng),將薄板樣條所在的空間進(jìn)行變形,產(chǎn)生一條更優(yōu)的飛行路徑,同時(shí)使得變形所需能量最小,以實(shí)現(xiàn)無人機(jī)平滑飛行。
1 環(huán)境模型
1.1 安全裕度
柵格法可以表示無人機(jī)飛行的工作環(huán)境,適當(dāng)大小的柵格粒子能夠有效將地圖簡(jiǎn)化,降低難度[14]。障礙物在柵格圖中表現(xiàn)為不可穿越的黑色柵格,見圖1(a)。在規(guī)劃過程中,為了得到步數(shù)最短的路徑,極易出現(xiàn)距離障礙物過近、貼障礙物飛行的情況。考慮到飛行環(huán)境的復(fù)雜,為了保障飛行安全,應(yīng)留有避險(xiǎn)空間[15]。將障礙物在柵格圖中的表示區(qū)域進(jìn)行擴(kuò)展,擴(kuò)展的柵格可以避免和障礙物之間距離過近,進(jìn)而提升無人機(jī)在不同環(huán)境下飛行的安全性。
具體來說,環(huán)境地圖中以(a,b)坐標(biāo)為障礙物中心,實(shí)際長(zhǎng)為p,實(shí)際寬為q,單位柵格邊長(zhǎng)代表的實(shí)際距離為d,擴(kuò)大其坐標(biāo)為:
(1)
式中:g(a,b)表示此區(qū)域是否可穿越,數(shù)值取1為不可穿越,數(shù)值取0為可穿越;x和y表示柵格地圖坐標(biāo)信息。
對(duì)于不規(guī)則的障礙物,可以將其分割為規(guī)則的障礙物,然后運(yùn)用式(1)進(jìn)行坐標(biāo)擴(kuò)大。為了避免規(guī)劃時(shí)的空間資源浪費(fèi),將不與障礙物緊鄰的安全區(qū)域柵格剔除,可得到最終留有安全距離的障礙物柵格表示,見圖1(b)。
圖1 障礙物的柵格表示
1.2 風(fēng)險(xiǎn)建模
基于工程倫理方面的考慮,在復(fù)雜情況下,需要考慮無人機(jī)帶來的風(fēng)險(xiǎn),因此對(duì)于可飛行的區(qū)域,增加風(fēng)險(xiǎn)因素值,建立風(fēng)險(xiǎn)評(píng)估矩陣:
(2)
式中Rij為第i行第j列柵格所對(duì)應(yīng)的區(qū)域量化以后的風(fēng)險(xiǎn)值。
對(duì)風(fēng)險(xiǎn)進(jìn)行估計(jì):
R=fAP
(3)
式中:f為無人機(jī)的安全指標(biāo),表示其墜機(jī)概率;A為墜機(jī)后受影響的人數(shù),取決于人口密度ρ和地面撞擊面積S[17];P為受影響人群的傷亡,可表示為:
(4)
式中:d為環(huán)境遮蔽系數(shù);pd為傷亡程度;e為死亡率至50%所需撞擊能量(d=0.5時(shí));β為死亡率至100%所需撞擊能量(無遮蔽時(shí));E為無人機(jī)產(chǎn)生碰撞時(shí)的動(dòng)能。
E的表達(dá)式為:
(5)
式中:vmax為運(yùn)行最大速度;vt為無人機(jī)墜落速度;ρa(bǔ)為當(dāng)?shù)貙?shí)際空氣密度。
因此,無人機(jī)飛行產(chǎn)生的風(fēng)險(xiǎn)代價(jià)為:
(6)
式中:RN為實(shí)際飛行路徑點(diǎn)的風(fēng)險(xiǎn)值;Rs為標(biāo)準(zhǔn)風(fēng)險(xiǎn)值。
2 空間變形算法
2.1 問題基礎(chǔ)
薄板樣條(thin-plate spline,TPS)是一種插值方法,其本質(zhì)是進(jìn)行數(shù)據(jù)插值,也可以進(jìn)行平滑[18-19]。TPS算法經(jīng)過所有控制點(diǎn),最后尋找出一個(gè)光滑曲面,使得生成此曲面的彎曲能最小[20]。
在工作環(huán)境C中,有若干原點(diǎn)xi(i=1,2,…,n),如圖2(a)所示。在基于TPS的原理上,將C看作獨(dú)立的可變形的金屬薄板,施加一定的形變,利用形變函數(shù),使得原本的位置移動(dòng)到x′i(i=1,2,…,n)。原點(diǎn)xi為控制點(diǎn),移動(dòng)終點(diǎn)x′i為目標(biāo)點(diǎn)。在構(gòu)造金屬板空間時(shí),如式(7)所示,移動(dòng)控制點(diǎn)到目標(biāo)點(diǎn),過程中產(chǎn)生的變形影響如圖2(b)所示。
圖2 薄板變形對(duì)平面點(diǎn)產(chǎn)生的影響
f(xi)=x′i
(7)
根據(jù)TPS算法,形變過程中施加的彎曲能大小為[20]:

(8)
彎曲能最小時(shí),相對(duì)應(yīng)點(diǎn)的形變函數(shù)為:
(9)
2.2 空間變形算法
對(duì)工作環(huán)境中的兩個(gè)目標(biāo),二者之間最短路徑為連接的直線。然而由于障礙物、任務(wù)點(diǎn)或者其它條件的約束,最短路徑無法實(shí)現(xiàn)。在空間變形算法中,工作環(huán)境視為一塊可變性的金屬板,獨(dú)立于此工作環(huán)境而單獨(dú)存在,在薄板樣條的基礎(chǔ)上,可以將兩個(gè)目標(biāo)之間連線看作具有無限的長(zhǎng)度,以便于變形扭曲。
在工作環(huán)境C中,有兩個(gè)點(diǎn)xs與xg,分別為起點(diǎn)與終點(diǎn),xs經(jīng)過路徑L到達(dá)xg,并經(jīng)過工作環(huán)境中的任務(wù)點(diǎn)xt,如圖3(a)所示。L是不平滑的路徑,無人機(jī)實(shí)際中沿此路徑飛行不合理。將起點(diǎn)與終點(diǎn)之間連接的直線d視為金屬板上長(zhǎng)度無限的直線,金屬板獨(dú)立于此工作環(huán)境單獨(dú)存在,通過對(duì)此金屬板施加彎曲能進(jìn)行變形,L產(chǎn)生扭曲,不改變?cè)冉?jīng)過的任務(wù)點(diǎn)xt,在存在障礙物時(shí)避開障礙物,使得路徑平滑,產(chǎn)生起點(diǎn)與終點(diǎn)間新的路徑L′。根據(jù)TPS原理,當(dāng)對(duì)金屬板施加彎曲能最小時(shí),產(chǎn)生起點(diǎn)與終點(diǎn)之間的最優(yōu)路徑。在直線d上取控制點(diǎn),對(duì)應(yīng)L上的拐點(diǎn)為目標(biāo)點(diǎn)。由此,金屬板空間變形過程中產(chǎn)生的影響如圖3(b)所示。
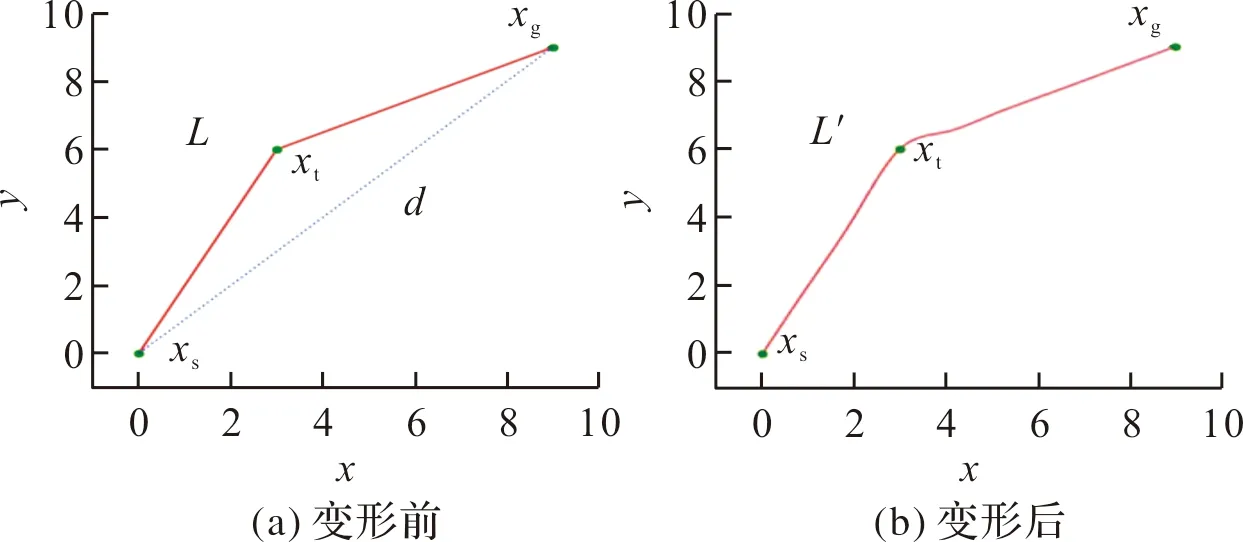
圖3 薄板變形對(duì)平面路徑產(chǎn)生的影響
對(duì)于金屬板空間的變形,計(jì)算其變形系數(shù)M:
M=E-1Y
(10)
(11)
式中:Y是由目標(biāo)點(diǎn)坐標(biāo)和0填充構(gòu)成的矩陣;E的組成有兩部分,一部分是控制點(diǎn),一部分是由控制點(diǎn)間歐氏距離構(gòu)成的徑向基K。由于路徑的特殊性,起點(diǎn)與終點(diǎn)不產(chǎn)生形變,可以對(duì)矩陣進(jìn)行升維并重構(gòu)。當(dāng)彎曲能最小時(shí),對(duì)應(yīng)變形見式(12)。空間變形算法中,Y矩陣與E矩陣具體組分如式(13)所示。
(12)
(13)
由此可得經(jīng)過空間算法變形后的路徑L′為:
(14)
3 基于空間變形算法的路徑規(guī)劃系統(tǒng)
將無人機(jī)的路徑規(guī)劃總體上分為兩個(gè)部分:1)利用全局路徑規(guī)劃算法產(chǎn)生最短路徑;2)利用空間變形算法對(duì)全局路徑進(jìn)行修改,形成最終路徑,使無人機(jī)按照變形后的路徑飛行。
對(duì)于所提出的基于空間變形的混合路徑規(guī)劃算法,可以將智能算法與空間變形算法進(jìn)行有效的融合,在保留智能算法優(yōu)點(diǎn)的同時(shí),也有效改善了這兩種算法在單獨(dú)使用時(shí)的缺陷。所使用的混合路徑規(guī)劃算法步驟流程圖如圖4所示。
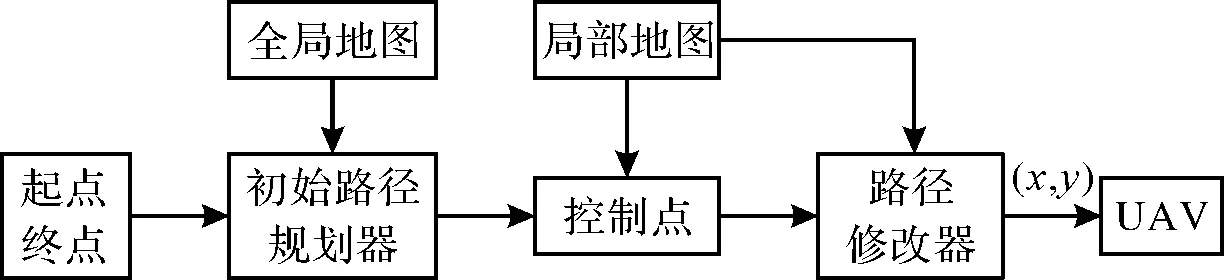
圖4 混合路徑規(guī)劃算法流程圖
3.1 全局規(guī)劃階段
采用灰狼優(yōu)化算法進(jìn)行全局路徑規(guī)劃以產(chǎn)生無人機(jī)的初始路徑。灰狼優(yōu)化算法模擬了自然界灰狼的領(lǐng)導(dǎo)層級(jí)和狩獵機(jī)制,具有強(qiáng)收斂性,參數(shù)少等特點(diǎn)[21]。
狼群從高到低一般分為α,β,δ,ω四個(gè)模擬領(lǐng)導(dǎo)階層等級(jí)。按照上述等級(jí)的劃分,灰狼α對(duì)灰狼β,δ和ω有絕對(duì)的支配權(quán);灰狼ω在灰狼群中的比例最大,同時(shí)灰狼ω又必須完全服從灰狼α,β和δ。
為了模擬灰狼群的等級(jí)制度,同時(shí)又能簡(jiǎn)化算法,因此,假設(shè)有一只灰狼α、一只灰狼β和一只灰狼δ作為灰狼領(lǐng)導(dǎo)者。將最優(yōu)方案作為灰狼α,第二和第三個(gè)最佳解決方案分別作為灰狼β和灰狼δ。剩下的候選解被假定為灰狼ω。在灰狼優(yōu)化算法中狩獵行為主要由灰狼α,β和δ進(jìn)行引導(dǎo),灰狼ω跟隨這3只狼。
將灰狼包圍獵物的行為定義為[21]:
Di=|Ci·Xi(t)-X(t)|
(15)
Xi(t+1)=Xi(t)-Ai·Di,i=1,2,3
(16)
(17)
式(15)表示灰狼α,β和δ與灰狼ω間的距離;式(16)是灰狼ω各自跟隨灰狼α,β和δ的位置更新;式(17)是灰狼ω最終位置公式。t是當(dāng)前的迭代次數(shù);X(t)和X(t+1)分別為灰狼ω當(dāng)前位置和生成的最終位置,X1(t),X2(t),X3(t)分別為灰狼α,β和δ當(dāng)前位置,X1(t+1),X2(t+1),X3(t+1)分別為灰狼ω各自跟隨灰狼α,β和δ生成的位置;D1,D2,D3為灰狼α,β和δ與灰狼ω間的距離;A1,A2,A3和C1,C2,C3是生成的隨機(jī)向量,Ai=2arand(m)-a,Ci=2rand(m),其中a為收斂因子,隨著迭代次數(shù)線性減小,rand(m)為0到1之間的隨機(jī)數(shù)。灰狼優(yōu)化算法的實(shí)現(xiàn)流程如圖5所示。
3.2 路徑修改階段
由全局路徑規(guī)劃器生成的全局路徑是不碰撞的路徑,但是在轉(zhuǎn)折點(diǎn)處過于鋒利,不符合無人機(jī)實(shí)際飛行情況。在飛行時(shí)應(yīng)用空間變形算法,更符合無人機(jī)飛行動(dòng)力學(xué),并保證無人機(jī)的穩(wěn)定移動(dòng)。將無人機(jī)的工作環(huán)境視為一塊可變形的薄板,獨(dú)立于工作環(huán)境而單獨(dú)存在,將全局路徑、起點(diǎn)和終點(diǎn)之間的直線看作可以任意變形。將全局路徑中的不平滑的拐點(diǎn)視為路徑必須經(jīng)過的任務(wù)點(diǎn),即為變形后的目標(biāo)點(diǎn)(xt,yt),根據(jù)目標(biāo)點(diǎn)在原全局路徑中的分段比例,在起點(diǎn)終點(diǎn)之間連線d上確定控制點(diǎn)(xc,yc),控制點(diǎn)與目標(biāo)點(diǎn)一一對(duì)應(yīng)。以改進(jìn)TPS算法為基礎(chǔ),將薄板所在的空間進(jìn)行變形。
f(L)=L′
(18)
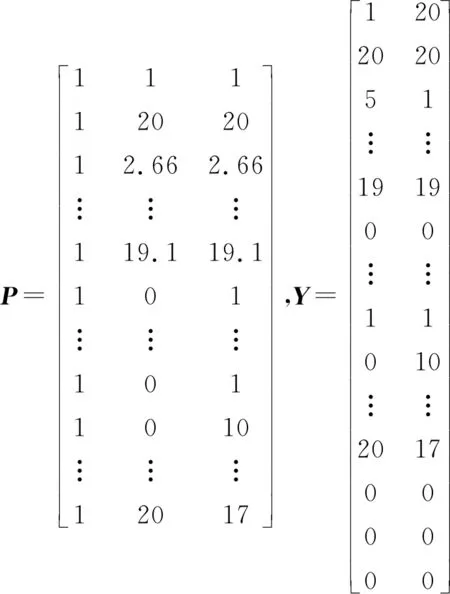
由于在變形中仍需考慮障礙物避讓,在進(jìn)行實(shí)際的路徑變形修改時(shí),將目標(biāo)點(diǎn)矩陣與控制點(diǎn)矩陣升維,加入障礙物頂點(diǎn)的約束。此外,還應(yīng)考慮工作環(huán)境的約束。多重約束下的最小彎曲能實(shí)現(xiàn)變形,此時(shí),經(jīng)過改進(jìn)后的空間變形算法,P與Y具體組分為:
(19)
式中:(xo,yo)為障礙物頂點(diǎn)坐標(biāo);(xp,yp)為構(gòu)成工作環(huán)境的邊界點(diǎn)。
路徑修改可分為5個(gè)步驟:
1)獲取全局路徑的起點(diǎn)、終點(diǎn)、轉(zhuǎn)折點(diǎn)坐標(biāo),構(gòu)建目標(biāo)點(diǎn)矩陣。
2)在連接起點(diǎn)終點(diǎn)的直線段上,根據(jù)全局路徑轉(zhuǎn)折點(diǎn),等比例提取控制點(diǎn),構(gòu)建控制點(diǎn)矩陣。
3)獲取障礙物頂點(diǎn)坐標(biāo)和工作環(huán)境的頂點(diǎn)坐標(biāo)。對(duì)基礎(chǔ)控制點(diǎn)目標(biāo)點(diǎn)矩陣進(jìn)行升維。
4)計(jì)算使彎曲能最小時(shí)的變形系數(shù)M。
5)對(duì)全局路徑進(jìn)行變形修改以獲取最優(yōu)路徑。
4 算法實(shí)現(xiàn)與仿真
采用MATLAB/Simulink軟件對(duì)上述基于空間變形的路徑規(guī)劃算法進(jìn)行仿真分析。根據(jù)實(shí)際情況設(shè)置地圖場(chǎng)景。地面人員密度已知,依照先驗(yàn)知識(shí)估算相關(guān)計(jì)算參數(shù),參數(shù)設(shè)置見表1。設(shè)置的地圖不同,遮蔽系數(shù)也不同,可以計(jì)算出不同區(qū)域的不同風(fēng)險(xiǎn)成本見表2。
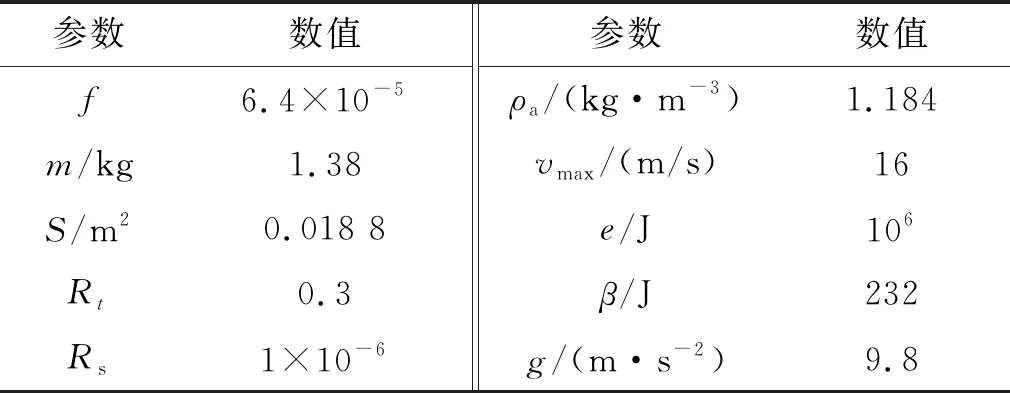
表1 風(fēng)險(xiǎn)計(jì)算參數(shù)設(shè)置
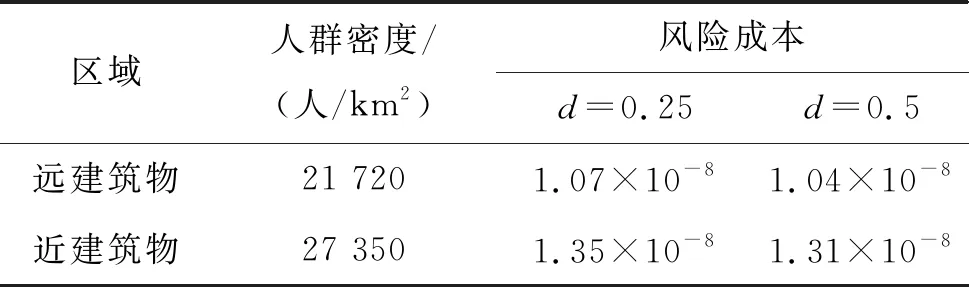
表2 風(fēng)險(xiǎn)成本
將截取的地圖柵格化,考慮到緊貼障礙物飛行有安全隱患,故引入安全裕度。橫縱坐標(biāo)分別為20個(gè)柵格單位,每個(gè)柵格單位為1 m,將黃色坐標(biāo)點(diǎn)(1,1)設(shè)為起始點(diǎn),綠色坐標(biāo)點(diǎn)(20,20)設(shè)為終點(diǎn),黑色柵格為障礙物,灰色柵格為預(yù)留出的安全裕度,彩色柵格為可通行柵格,由淺及深表示風(fēng)險(xiǎn)等級(jí)逐漸增加。獲取地圖邊界點(diǎn)坐標(biāo)(xp,yp)和障礙物頂點(diǎn)坐標(biāo)(xo,yo)。含有風(fēng)險(xiǎn)成本的環(huán)境模型如圖6所示。
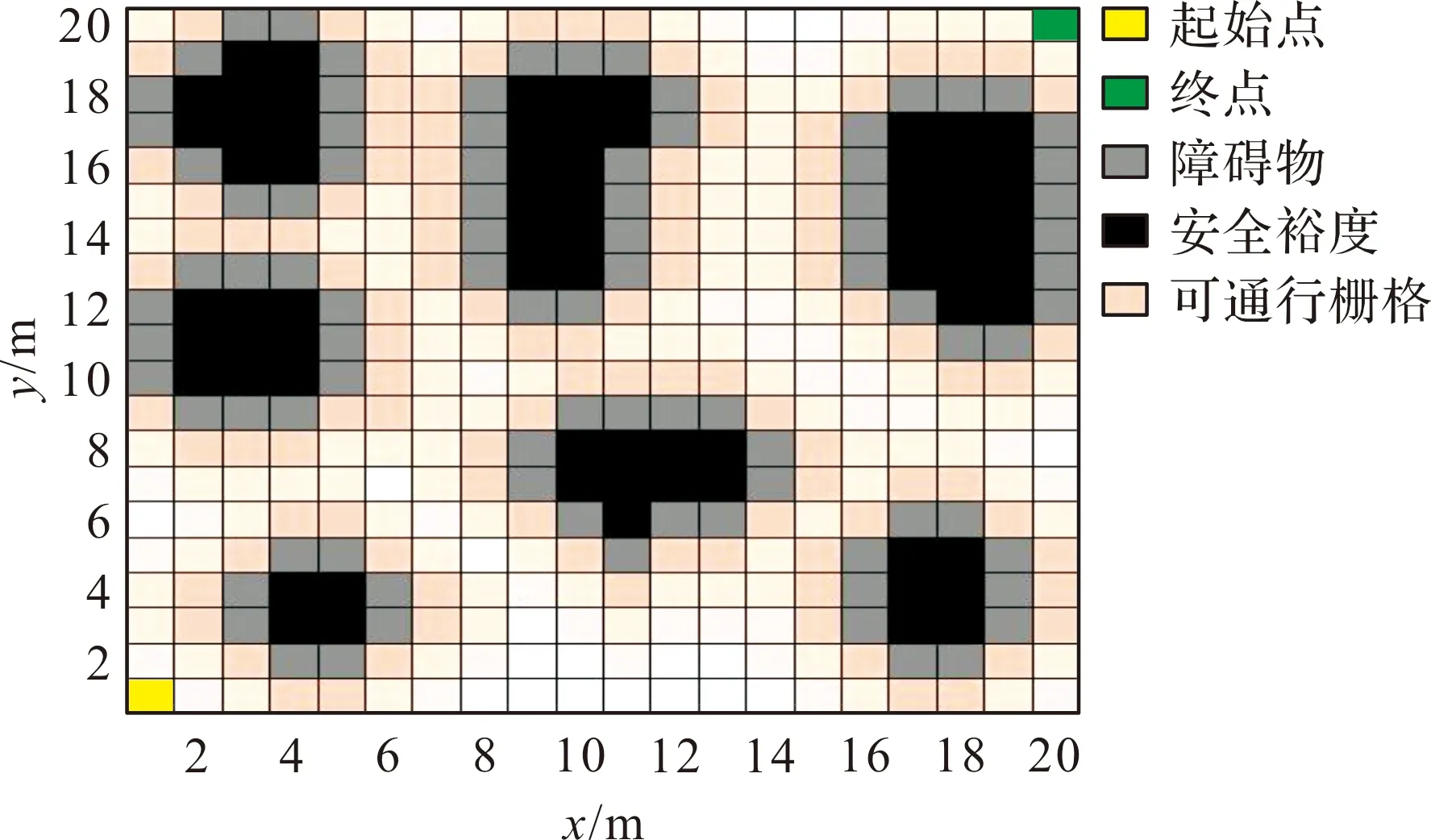
圖6 留有安全距離考慮風(fēng)險(xiǎn)的柵格地圖模型
在地圖中運(yùn)用灰狼優(yōu)化算法進(jìn)行全局路徑的規(guī)劃。設(shè)置種群里有12只狼,最大迭代次數(shù)為100,產(chǎn)生的路徑L如圖7所示,產(chǎn)生的路徑拐點(diǎn)為:
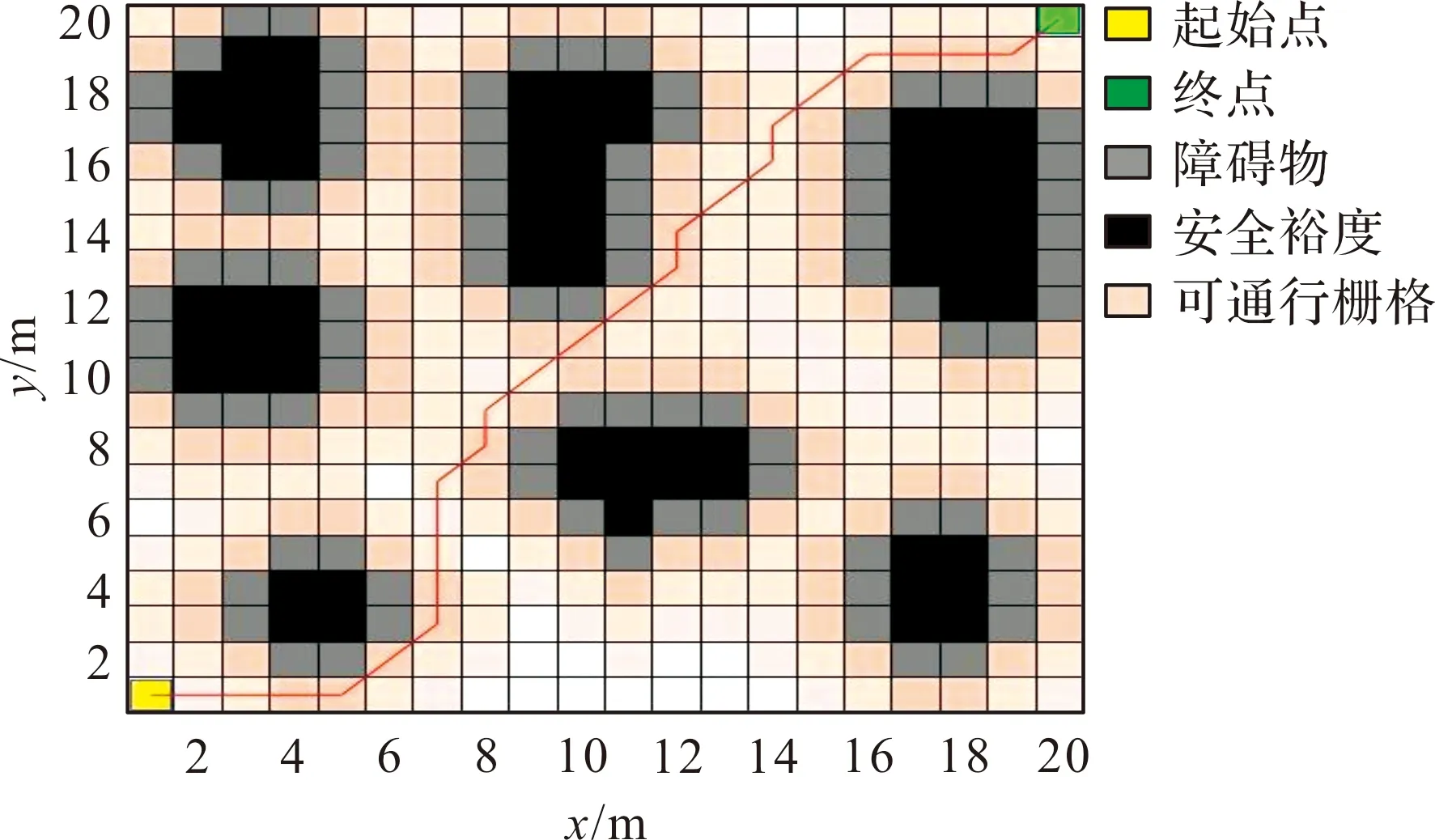
圖7 初始全局路徑

(20)
可以看出,產(chǎn)生的路徑有一些過大的轉(zhuǎn)折,路徑有不合理的曲率,可進(jìn)行二次路徑修改。
根據(jù)路徑的轉(zhuǎn)折點(diǎn),獲取目標(biāo)點(diǎn)坐標(biāo),其中對(duì)一些過近的目標(biāo)點(diǎn)進(jìn)行優(yōu)化,適當(dāng)取中。再根據(jù)轉(zhuǎn)折點(diǎn)在全局路徑中的比例,確定控制點(diǎn)坐標(biāo),計(jì)算出變形系數(shù)。目標(biāo)點(diǎn)矩陣T,控制點(diǎn)矩陣H可表示為:
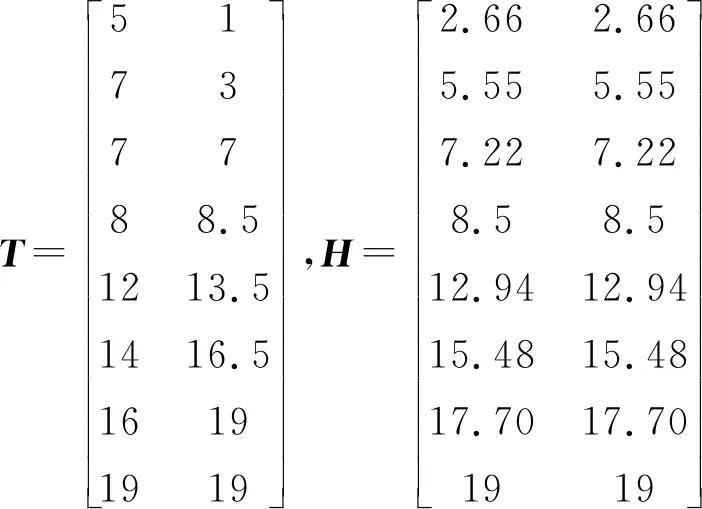
(21)
(22)
(23)
對(duì)產(chǎn)生的全部路徑運(yùn)用空間變形算法,變形后產(chǎn)生的最優(yōu)路徑L′如圖8藍(lán)色路徑所示。
對(duì)結(jié)果進(jìn)行對(duì)比分析見表3。

表3 算法對(duì)比(含安全裕度)
如表3所示,在考慮安全裕度的情況下,基于空間變形的混合算法與傳統(tǒng)的灰狼算法相比,規(guī)劃出了更短的路徑。如圖8和圖9所示,混合算法規(guī)劃出的路徑連續(xù),更平滑,沒有鋒利拐點(diǎn),且曲率值均小于1,符合無人機(jī)性能約束。因此,文中提出的基于空間變形的混合路徑規(guī)劃算法,可以獲得更短的可靠路徑。
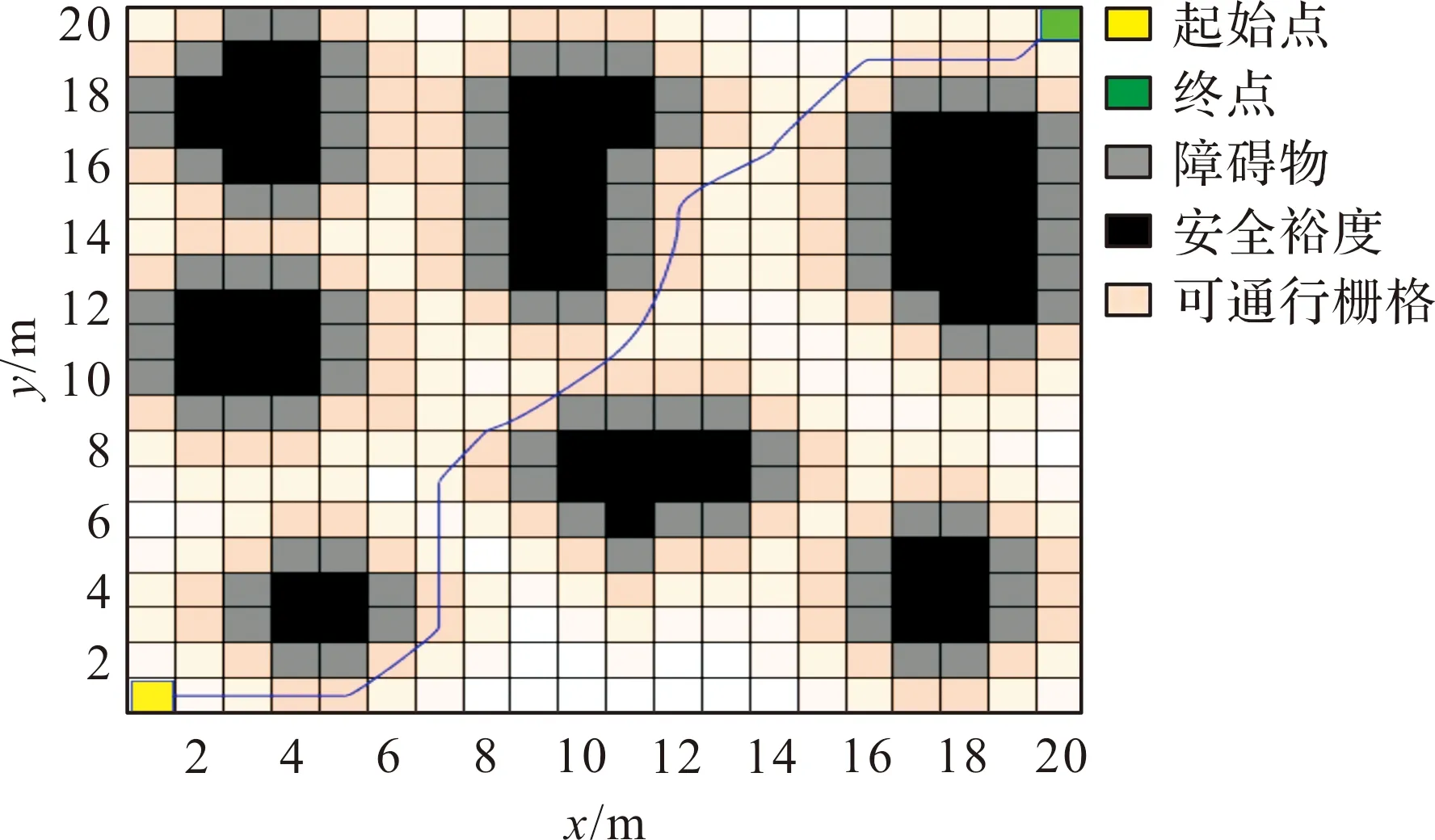
圖8 二次修改路徑
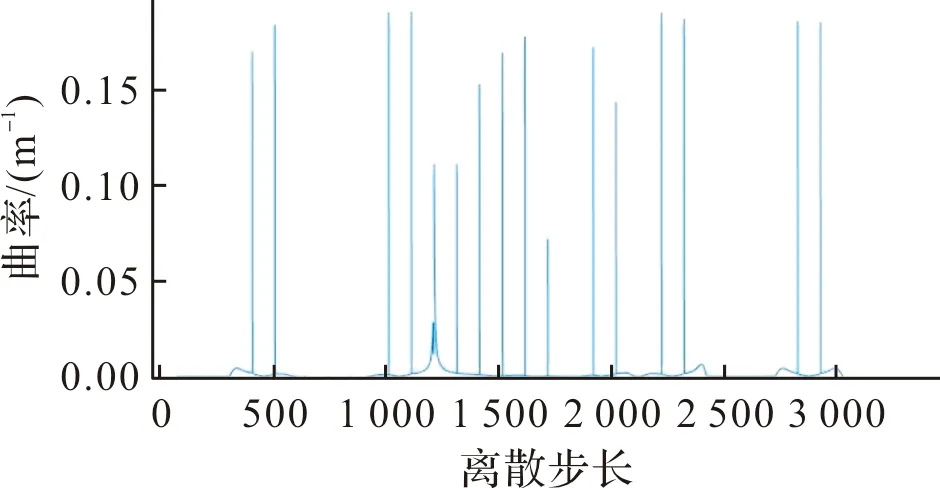
圖9 曲率變化曲線
將文中方法與未考慮安全裕度的灰狼算法進(jìn)行對(duì)比,以證明所提出算法的安全性。傳統(tǒng)灰狼算法在未考慮安全裕度的情況下,規(guī)劃出的路徑如圖10所示。表4對(duì)比兩種情況下的路徑長(zhǎng)度和風(fēng)險(xiǎn)成本,可以發(fā)現(xiàn),文中提出的混合算法,損失了5.7%的路徑長(zhǎng)度的同時(shí),降低了19%的風(fēng)險(xiǎn)代價(jià),規(guī)劃出了一條更安全更符合無人機(jī)飛行動(dòng)力學(xué)的最佳路徑。有利于復(fù)雜情況下的安全飛行。
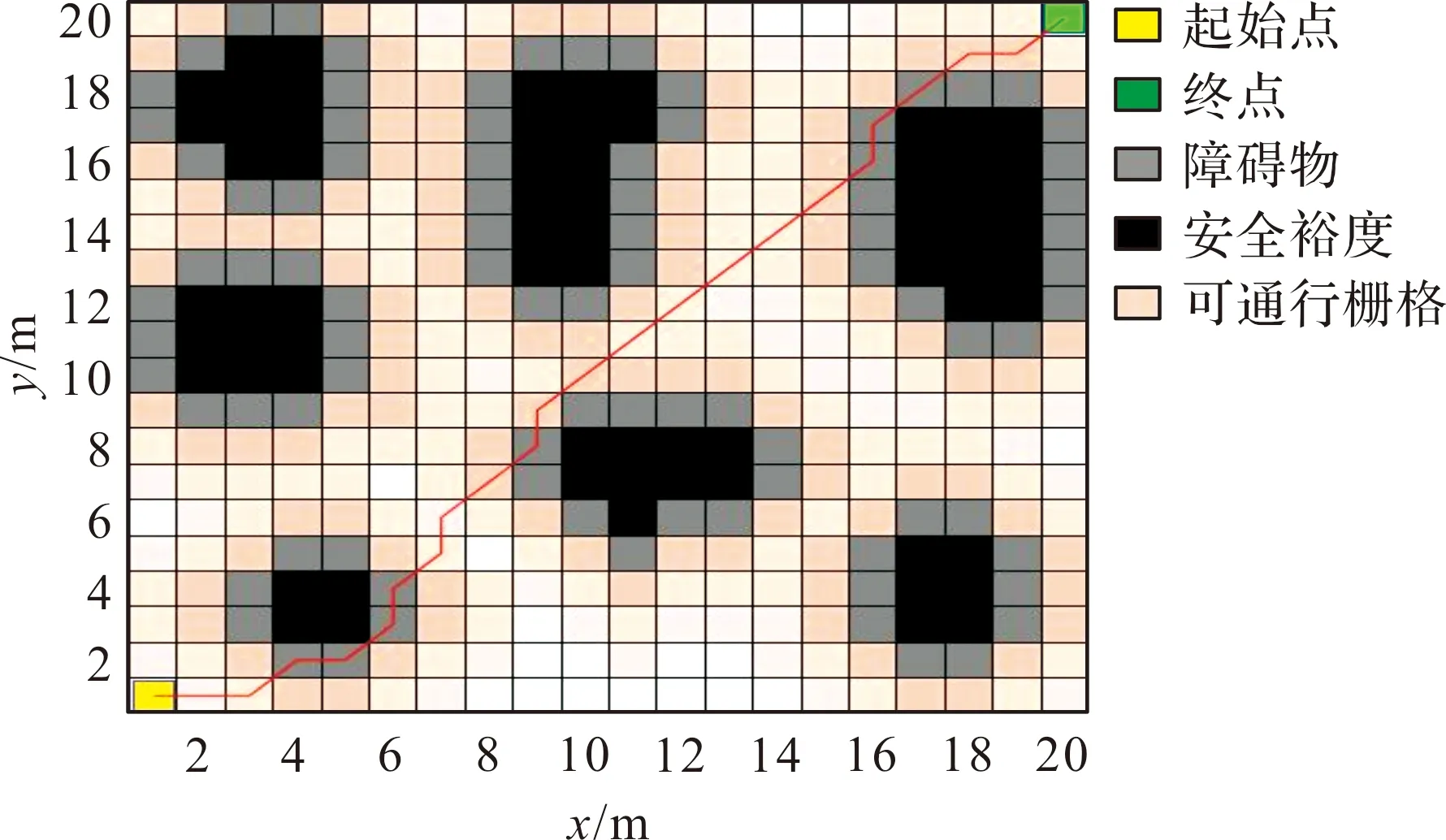
圖10 灰狼算法規(guī)劃路徑(無安全裕度)
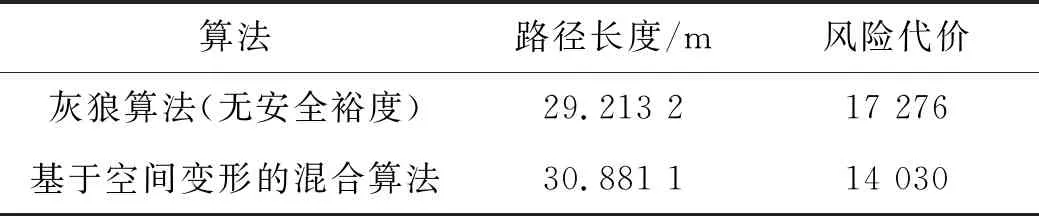
表4 算法對(duì)比
5 結(jié)論
針對(duì)UAV應(yīng)用,提出的路徑規(guī)劃算法在賦予地圖風(fēng)險(xiǎn)信息的基礎(chǔ)上分兩部分進(jìn)行:首先進(jìn)行全局路徑規(guī)劃,然后為路徑修改階段。將灰狼算法和TPS算法進(jìn)行改進(jìn),提出一種基于空間變形的混合路徑規(guī)劃算法,利用薄板樣條的特性,對(duì)工作環(huán)境進(jìn)行變形,從而獲取無碰撞的最佳路徑。
仿真結(jié)果表明,所采用的基于空間變形的混合路徑規(guī)劃算法,與傳統(tǒng)灰狼算法相比,在路徑長(zhǎng)度方面,基于空間變形的混合路徑規(guī)劃算法規(guī)劃出的路徑長(zhǎng)度為30.97 m,比傳統(tǒng)灰狼算法多了5.7% ;而在安全風(fēng)險(xiǎn)方面,基于空間變形的路徑規(guī)劃算法與建筑物間留有裕度,安全系數(shù)更高,相比于傳統(tǒng)灰狼算法,降低了19%的風(fēng)險(xiǎn)代價(jià)值,以較低的路徑長(zhǎng)度成本換取了更安全的路徑;在光滑度方面,基于空間變形的路徑規(guī)劃算法更加平滑,鋒利拐點(diǎn)個(gè)數(shù)降低,無人機(jī)飛行路徑更加平穩(wěn),貼合實(shí)際。總的來說,所提出的算法使得無人機(jī)路徑規(guī)劃性能和安全性得到大幅度提升,但還存在應(yīng)用場(chǎng)景的局限性,在更為復(fù)雜的場(chǎng)景中還有優(yōu)化空間。未來,可以發(fā)展到多機(jī)飛行和三維空間中。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
公民與法治(2020年11期)2020-07-25 02:02:06
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
商周刊(2017年5期)2017-08-22 03:35:26
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41