全自動多角度定點橄欖球踢球機器人的設計
2022-03-17 10:16:20翟麗紅
電子測試 2022年5期
翟麗紅
(太原工業學院,山西太原,030008)
0 引言
隨著計算機技術的發展,人工智能和智能機器人學科的理論及應用研究成為人工智能研究的熱點。體育競技不再僅僅是體力、技術的較量,也是高科技成果的較量[1]。隨著機器人技術的不斷進步,各種機器人陸續出現,機器人體育競技比賽的發展成為機器人中的一項不可缺少的賽事[1]。機器人的球類運動把知識性和娛樂性融為一體,向人們提供了一個展示高科技成果的形象化窗口[2]。踢球機器人要求具有良好的動力學特性和踢球能力[1]。復雜的策略及算法和較高的速度及強大的踢球機構對機器人性能都非常重要。
在第19屆ROBOCON全國大學生機器人大賽中出現了一種踢橄欖球機器人,與傳統的規則球類相比橄欖球的特殊形狀也決定了其機器人的特殊性[1]。
本文提供了一種以舵輪底盤為基礎的全自動多角度定點橄欖球踢球機器人設計,利用仿生學對機器人結構進行設計,能夠真正實現人和機器人的互動,可用于橄欖球運動訓練、宣傳以及性能測試。
1 踢球機器人
1.1 結構設計
如圖1所示,本踢球機器人的結構設計模型包含12部分,各部分結構名稱如表1所示。模型中,玻璃纖維底盤,用于連接機器人的各個結構,實現其整體移動。舵輪轉向驅動是舵輪轉向驅動力的來源。舵輪,作為機器人整體移動的動力來源,用于機器人的移動和方向調整。霍爾開關,可以在機器人啟動時用于確定舵輪的初始位置。MAXON EC30電機,為踢球結構提供了動力。絕對值式編碼器用于記錄電機的轉角,傳輸給控制系統。踢球結構實現機器人實現踢球功能。固定在玻璃纖維底盤上的全場定位系統,可以記錄其相對位置定位。球座,盛放橄欖球的零件。撿放球座結構,配合球調整機構進行球姿態的調整及球和球座的撿放。球調整機構,調節橄欖球的姿態,提高踢球的命中率。車身角度記錄系統 ,檢測機器人的整體轉角,反饋給控制系統。
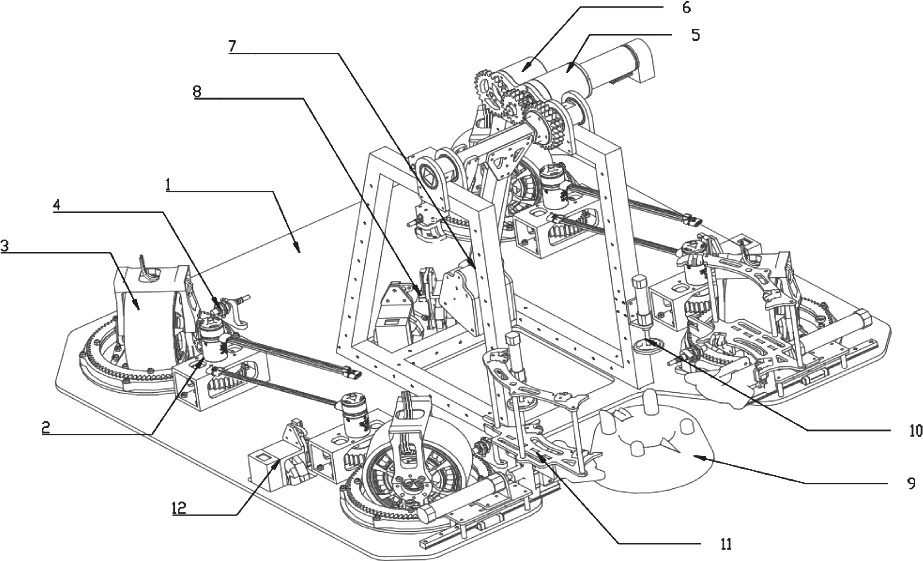
圖1 踢球機器人設計原理圖

表1 圖1結構說明
1.2 舵輪結構
如圖2所示舵輪結構及表2所示,舵輪結構圖中,走線架用于固定舵輪上的線,防止在舵輪旋轉的時候造成損壞。鋁制輪轂與硅膠輪配合使用,承載底盤。電機轉軸座,支撐電機轉軸一端,將電機固定在玻纖底盤上。鋁制輪轂與電機轉軸座之間的連接靠深溝球軸承實現。磁編碼器通過檢測電機轉軸上的磁環來讀取電機所轉角度。舵輪動力來源是電機。電機定軸座與玻纖底盤連接,固定并支撐電機的一端。
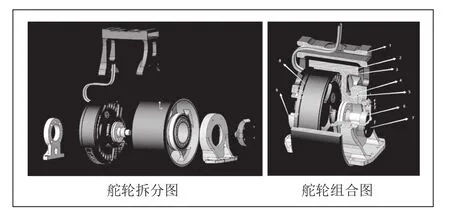
圖2 舵輪結構圖
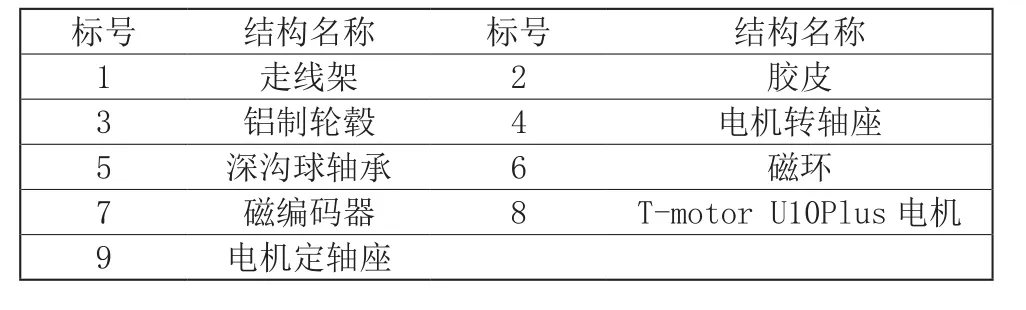
表2 舵輪結構說明
1.3 撿放球及姿態矯正機構
如圖3和表3所示,撿放球及姿態矯正結構圖中,撿放球氣缸,通過氣缸的伸縮來實現撿放球結構的上下移動,達到撿放球的目的。撿放球氣缸固定角鋁,用來將氣缸固定在踢球結構的保持架上。圓卡片,與撿放球氣缸連接,傳遞撿放球氣缸的動力配合升降玻纖實現上下移動[1]。升降玻纖,利用圓卡片傳遞過來的動力,帶動姿態矯正機構上下運動,實現撿放球。球姿態矯正玻纖,利用姿態矯正氣缸提供的動力,兩邊的姿態矯正玻纖同時合向中間,對球的姿態進行矯正。導輪,輔助球姿態矯正玻纖對球的姿態進行矯正。姿態矯正氣缸,姿態矯正的動力來源。姿態矯正氣缸固定角鋁,用來將矯正氣缸固定在其調整玻纖上面,便于調整。上下矯正連接,連接撿放球機構和姿態矯正機構。撿放球滑塊和矯正玻纖以及球座姿態矯正件配合,實現球的撿起和放下功能。滑動角鋁,連接矯正件和撿放球滑塊,帶著球座姿態矯正件上下移動。球座姿態矯正件,利用姿態矯正氣缸提供的動力向中間合攏,對球座進行姿態矯正。姿態矯正滑塊,連接姿態矯正機。姿態矯正滑軌,限制球姿態矯正玻纖和球座姿態矯正件的運動軌跡,保護氣缸。姿態矯正氣缸調整玻纖,固定姿態矯正氣缸并控制姿態矯正的調節程度。墊高尼龍柱,調節矯正氣缸的高度位置。
1.4 踢球架
如圖4和表4所示,踢球架結構中,踢球結構保持架,保持踢球結構的位置,將踢球結與玻璃纖維底盤連接。絕對式編碼器,與電機配合,監測電機所轉角度。MAXON EC30電機,踢球腳的動力來源,為踢球提供動力。磁鐵座,前端固定一個磁鐵,可以被霍爾開關檢測到,用于踢球過程中的初使位置確定。霍爾開關,檢測磁鐵并給控制系統傳回一個信號。
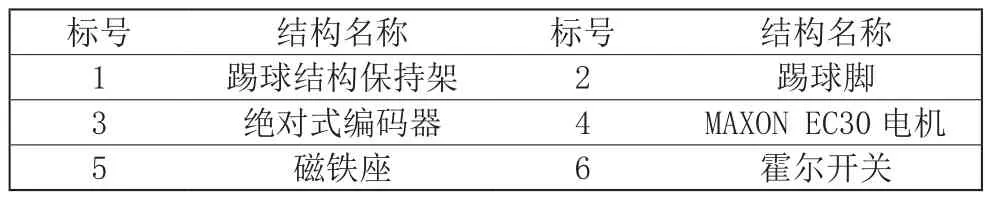
表4 圖4結構說明
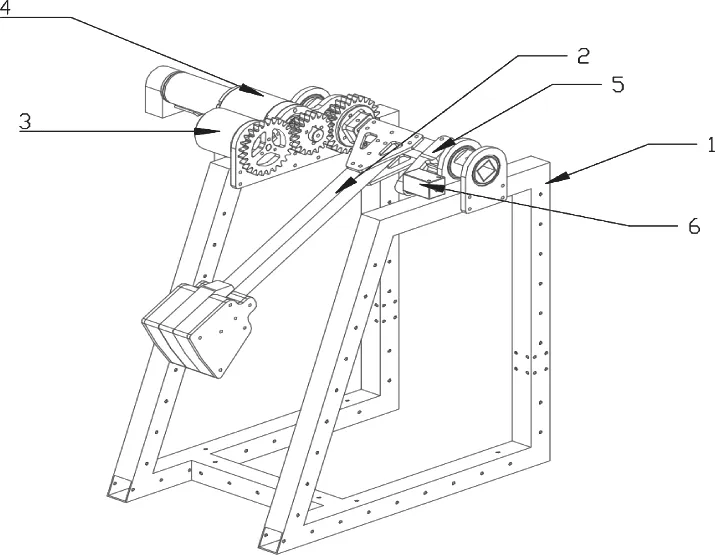
圖4 踢球架
2 工作原理
如圖1所示,機器人啟動后,通過正交碼盤和陀螺儀進行初始位置角度記錄。如圖4所示,踢球機構初始化至初始位置,如MAXON EC30電機的驅動,與霍爾開關檢測磁鐵座前端固定的磁鐵相互配合,可完成踢球機構初始化。將橄欖球球座置于圖1中的球座處,橄欖球并會觸發紅外測距模塊。傳感器將信息返回主控制器中,圖3中的姿態矯正機構中,兩氣缸前推后拉往返一次后拉將球座和橄欖球的進行姿態矯正,將球豎直放置于球座的上端,圖4機構中的紅外測距模塊觸發,機器人接收到球已放好的信息,人觸發圖4中的紅外測距模塊,圖3中球調整機構會將球抓住并調整姿態(兩個氣缸同時前推,球座夾持,球姿態矯正玻纖和導輪共同矯正橄欖球姿態。隨后,撿放球氣缸回拉,升降玻纖傳動,撿放球滑塊進行限位,抬起整套姿態矯正機構,完成撿球動作);撿球后,機器人在舵輪轉向驅動和舵輪配合提供移動動力,利用定位系統反饋數據,在到達設定位置的過程中,通過全場定位系統的數據和程序對角度進行設定,調整踢球角度;到達后,調整機構將球座和球放下氣缸前推,整套姿態矯正機構下降,球座觸底,兩氣缸同時通過節流閥緩慢后拉,將球和球座平穩放下執行踢球動作。踢球結構將球踢出(利用圖4中絕對式編碼器對電機轉角進行轉矩控制,進而控制踢球腳的力度以及方向,完成定點踢球[1]。最后,機器人夾持球座,對球座進行重復利用,踢球機構回初始位置,并等待下一個新的指令。機器人裝有多個高精度的傳感器,完成數據的收集,并反饋給控制系統,精確調整機器人的運動。
3 總結
本文設計了一款基于機器人舵輪底盤進行全方位移動的自動踢球機器人,從結構設計、舵輪設計、撿放球及姿態矯正機構及踢球架對踢球機器人進行了設計及描述。本設計可以有效實現人機互動,可用于橄欖球運動的訓練、宣傳以及性能測試。