不確定規(guī)劃中循環(huán)可達(dá)狀態(tài)信息的維護(hù)*
2022-03-17 10:17:22張瀟妮文中華彭擎宇
計(jì)算機(jī)與數(shù)字工程 2022年2期
張瀟妮 文中華,2 彭擎宇
(1.湘潭大學(xué)信息工程學(xué)院 湘潭 411105)(2.湖南工程學(xué)院計(jì)算機(jī)與通信學(xué)院 湘潭 411104)
1 引言
智能規(guī)劃的基礎(chǔ)模型通過圖來建立[1],近年來,對(duì)智能規(guī)劃的建模從確定圖模型擴(kuò)展到不確定圖模型[2]。不確定規(guī)劃放寬以往經(jīng)典規(guī)劃的一些基本假設(shè),使之更接近實(shí)際情況的解答,現(xiàn)已應(yīng)用到不少領(lǐng)域中。
在不確定規(guī)劃[3]中,有許多求解不確定規(guī)劃解[4~6]與一些復(fù)雜查詢的問題研究(如:蛋白質(zhì)分子之間是否有交互作用,找尋網(wǎng)絡(luò)安全中的不確定攻擊圖的攻擊路徑[7~8]等)。在求解與查詢過程中,由于狀態(tài)之間的可達(dá)信息缺乏,會(huì)有大量重復(fù)的搜索,因此,有不少學(xué)者在可達(dá)性查詢[9]研究取得重要成果,如:基于樹形結(jié)構(gòu)的可達(dá)性查詢[10~12],利用矩陣的性質(zhì)求解狀態(tài)之間的可達(dá)性[13~15]等,基于區(qū)間樹的求解算法只能盡大可能地獲取節(jié)點(diǎn)之間的可達(dá)關(guān)系,不能良好地求解整個(gè)系統(tǒng)中的各個(gè)節(jié)點(diǎn)之間的可達(dá)關(guān)系。在動(dòng)態(tài)環(huán)境中,對(duì)狀態(tài)可達(dá)性的研究更多的是基于狀態(tài)之間的確定可達(dá)的操作,若是可達(dá)即為確定可達(dá),否則為不可達(dá),忽略了狀態(tài)之間的不確定可達(dá),此外,對(duì)有向圖的要求大多是無環(huán)的。
在不確定規(guī)劃中,它考慮了每一個(gè)動(dòng)作效果的存在性,也就考慮了狀態(tài)之間的可達(dá)性的不確定性。本文通過矩陣來建立問題模型,充分考慮狀態(tài)之間的動(dòng)作執(zhí)行的不確定性,準(zhǔn)確表達(dá)狀態(tài)間的可達(dá)性(確定可達(dá)、不確定可達(dá)與不可達(dá)),提出了一種新的狀態(tài)可達(dá)關(guān)系的維護(hù)算法,對(duì)動(dòng)態(tài)環(huán)境下的不確定性動(dòng)作的存在變動(dòng)性所影響的狀態(tài)之間的可達(dá)關(guān)系進(jìn)行局部更新維護(hù),適用于循環(huán)不確定系統(tǒng)中。該方法根據(jù)已有的信息可達(dá)矩陣和變更之后的不確定系統(tǒng)的鄰接矩陣的信息,重新進(jìn)行轉(zhuǎn)發(fā),對(duì)可達(dá)矩陣進(jìn)行局部更新,取得新的狀態(tài)可達(dá)矩陣,避免重新求解。
2 相關(guān)定義
定義1:一個(gè)三元組可表示為規(guī)劃領(lǐng)域中的不確定的狀態(tài)轉(zhuǎn)換系統(tǒng),即∑=<S,A,γ>其中:S是一個(gè)有限狀態(tài)集;A是一個(gè)有限動(dòng)作集;γ:S×A→2s是狀態(tài)轉(zhuǎn)移函數(shù)。
定義2:設(shè)∑=<S,A,γ>是一個(gè)不確定狀態(tài)轉(zhuǎn)移系統(tǒng),從狀態(tài)si開始,執(zhí)行γ=(si,ax)之后,可能到達(dá)的狀態(tài)集合SL={s|s∈(sx,ax),s?{s1,s2,…,sn},1 ≤x≤n} 中的一個(gè)狀態(tài),若si∈γ(sj,aj)(?i,i<j),則稱∑=<S,A,γ>為循環(huán)不確定狀態(tài)轉(zhuǎn)移系統(tǒng)s∈γ(sj,aj)(?i,i<j),否則為非循環(huán)不確定狀態(tài)轉(zhuǎn)移系統(tǒng)。
定義3:在一個(gè)不確定狀態(tài)轉(zhuǎn)移系統(tǒng)中,用函數(shù)d(s1,s2) 來表示s1和s2兩個(gè)狀態(tài)間的可達(dá)關(guān)系。可達(dá)關(guān)系定義如下:
當(dāng)狀態(tài)s1存在一條非循環(huán)路徑確定可達(dá)狀態(tài)s2時(shí),則稱s1到s2確定可達(dá),d(s1,s2)=1;
當(dāng)狀態(tài)s1存在一條路徑L并且s2∈SL時(shí),則稱s1到s2不確定可達(dá),d(s1,s2)=T;
當(dāng)狀態(tài)s1的任意一條路徑L都有s2?SL時(shí),則稱s1到s2不可達(dá),d(s1,s2)=0;
其中狀態(tài)自己到狀態(tài)自己為確定可達(dá)d(si,si)=1(1 ≤i≤n),此類關(guān)系構(gòu)成的矩陣即是可達(dá)矩陣。
定義4:通過一個(gè)唯一標(biāo)識(shí)關(guān)聯(lián)區(qū)分不確定狀態(tài)轉(zhuǎn)移系統(tǒng)中任意不確定動(dòng)作,記為Tx。狀態(tài)si執(zhí)行Tx后可能到達(dá)的狀態(tài)集合Tx.mark={sm,sn,s0,…,sz}稱為不確定動(dòng)作Tx的信念狀態(tài)。Tx.num是不確定動(dòng)作Tx的信念狀態(tài)個(gè)數(shù)。
定義5:在一個(gè)不確定狀態(tài)轉(zhuǎn)移系統(tǒng),用s-i→s-j表示將狀態(tài)si的可達(dá)信息s-i傳遞給狀態(tài)sj,d'(si,sj)表示經(jīng)信息傳遞后獲取的狀態(tài)si到狀態(tài)sj的可達(dá)關(guān)系。其信息傳遞原則如下:
若d(si,sk)=1,d(si,sj)=1||T||0 ,則s-i→s-j:d'(si,sj)=1;
若d(si,sk)=0 ,d(si,sj)=1||T||0 ,則s-i→s-j:d'(si,sj)=d(si,sj);
若d(si,sk)=Tn,d(si,sj)=Tm,則s-i→s-j:d'(si,sj)=Tn+Tm;
若d(si,sk)=Tn,d(si,sj)=Tn,si-j[Tn].value=si-j[Tn].value+card(si-k[Tn].mark-(si-j[Tn].mark∩sk-j[Tn].mark)),當(dāng)si-j[Tn].value=Tn.value,則s-i→s-j:d'(si,sj)=1,否則為d′(si,sj)=Tn。
3 算法思想
3.1 狀態(tài)標(biāo)記
狀態(tài)標(biāo)記記錄著該狀態(tài)的最新狀態(tài)信息的更新是經(jīng)哪個(gè)狀態(tài)傳遞的,更新原則如下。
1)不確定系統(tǒng)的鄰接矩陣中所有狀態(tài)的初始標(biāo)簽tag均為0,若經(jīng)由傳遞后可達(dá)信息不變,tag 仍記為0。
2)狀態(tài)間的可達(dá)關(guān)系經(jīng)傳遞后形成確定可達(dá)關(guān)系或是由不可達(dá)成為不確定可達(dá)時(shí),則更新為最新傳遞可達(dá)信息的狀態(tài);
3)判斷可達(dá)關(guān)系是否不確定時(shí),若根據(jù)原狀態(tài)si與sv的可達(dá)關(guān)系,狀態(tài)sv與狀態(tài)sx的可達(dá)關(guān)系,可得知狀態(tài)si到狀態(tài)sx的可達(dá)關(guān)系,此時(shí)記錄six.tag為最后一狀態(tài)編號(hào)加1。
當(dāng)系統(tǒng)中狀態(tài)si與sv的執(zhí)行動(dòng)作因其它因素發(fā)生變動(dòng)(包括邊的添加與刪除操作),則需重新判斷狀態(tài)si與狀態(tài)sv的可達(dá)關(guān)系,與原系統(tǒng)的可達(dá)矩陣中的對(duì)應(yīng)信息對(duì)比,若是不一致,則說明該狀態(tài)的可達(dá)信息變更了,因此經(jīng)該狀態(tài)sv作為中間狀態(tài)傳遞的可達(dá)信息也就會(huì)受到影響,需進(jìn)行更新;否則,無需更新。在此過程中,也會(huì)有狀態(tài)不受該執(zhí)行動(dòng)作變動(dòng)的影響,但仍需對(duì)其進(jìn)行轉(zhuǎn)發(fā),直至受其影響的狀態(tài)均進(jìn)行比較、轉(zhuǎn)發(fā)操作或可達(dá)信息不再變更時(shí),則該系統(tǒng)的狀態(tài)確定可達(dá)信息已求解出。
3.2 狀態(tài)可達(dá)關(guān)系更新
狀態(tài)之間可達(dá)關(guān)系更新步驟如下。
1)若狀態(tài)si與sv(i<v)的可達(dá)關(guān)系變動(dòng),則將可達(dá)矩陣R中滿足s-v.tag>=i的狀態(tài)sv的可達(dá)信息恢復(fù)到變更后的鄰接矩陣B的狀態(tài)sv對(duì)應(yīng)可達(dá)信息,同時(shí)將狀態(tài)si(s-v.tag<v)的可達(dá)信息再次傳遞到狀態(tài)sv。
2)若可達(dá)信息里原狀態(tài)可達(dá)矩陣D的狀態(tài)sv與當(dāng)前狀態(tài)sv不一致,則將sv中s-v.tag<v的信息重新進(jìn)行傳遞,將需要更新的狀態(tài)(sx.tag<v)的可達(dá)信息(需滿足s-x.tag>=v)恢復(fù)為變更后的鄰接矩陣B的該狀態(tài)對(duì)應(yīng)的可達(dá)信息,再進(jìn)行傳遞,更新記錄可達(dá)信息變更的最后一狀態(tài)Colcmax,與其狀態(tài)可達(dá)標(biāo)記。
3)狀態(tài)sv的可達(dá)信息傳遞之后,再將下一狀態(tài)sv+1且sv+1.tag<v+1的可達(dá)信息進(jìn)行傳遞,判斷哪些狀態(tài)的可達(dá)信息需要進(jìn)行更新,重復(fù)2)操作。
4)依次進(jìn)行轉(zhuǎn)發(fā),直到最后更新的狀態(tài)的可達(dá)信息與原可達(dá)矩陣一致或者最后一個(gè)狀態(tài)的信息進(jìn)行轉(zhuǎn)發(fā),則結(jié)束與原狀態(tài)可達(dá)矩陣的比較。
5)最后,再對(duì)可達(dá)矩陣進(jìn)行遍歷,找出所有元素值為0的點(diǎn)即為不確定可達(dá)矩陣。
證明:
可達(dá)狀態(tài)相關(guān)可達(dá)信息恢復(fù)到變更后的鄰接矩陣對(duì)應(yīng)信息,經(jīng)信息的傳遞,不會(huì)因?yàn)槿笔渌鼱顟B(tài)傳遞的信息而影響其最終的確定可達(dá)信息。因此,在信息傳遞之后,只需對(duì)找出所有不確定可達(dá)狀態(tài)對(duì)即可。
1)若狀態(tài)si與狀態(tài)sv之間是一型確定可達(dá),可直接通過鄰接矩陣或經(jīng)信息傳遞可得。
2)若狀態(tài)si與狀態(tài)sv之間是二型確定可達(dá),有此兩種情形:當(dāng)si-j[Tx].value=Tx.num,且狀態(tài)sv并非Tx的信念狀態(tài)時(shí),根據(jù)中間狀態(tài)的可達(dá)信息,向確定可達(dá)狀態(tài)的傳遞信息原則,則必存在狀態(tài)sj(i≤j≤Colcmax) ,使得si-j[Tx].value=Tx.num,且si-j.tag<=i,此si-j可達(dá)信息不會(huì)恢復(fù)變更后的鄰接矩陣對(duì)應(yīng)可達(dá)信息;當(dāng)sij的可達(dá)信息由原可達(dá)矩陣的確定可達(dá)恢復(fù)到不確定可達(dá)時(shí),即狀態(tài)sv是Tx的信念狀態(tài)時(shí),根據(jù)狀態(tài)向其確定可達(dá)的狀態(tài)進(jìn)行傳遞信息原則,則必存在狀態(tài)sj(i≤j≤Colcmax),且si-j.tag<=i,si-j[Tx].value=Tx.num-1,sv=si-v[Tx].mark-si-j[Tx].mark,經(jīng)信息的發(fā)送,使得si-v[Tx].value=Tx.num。
4 算法實(shí)現(xiàn)
設(shè)∑=(S,A,γ)為不確定狀態(tài)轉(zhuǎn)移系統(tǒng),S為狀態(tài)集合,D為∑=(S,A,γ)的原狀態(tài)可達(dá)矩陣,B表示∑′=(S,A,γ′)狀態(tài)之間可達(dá)關(guān)系發(fā)生變更后的鄰接矩陣,R是∑′=(S,A,γ′)狀態(tài)可達(dá)信息更新后的狀態(tài)可達(dá)矩陣。算法如下:
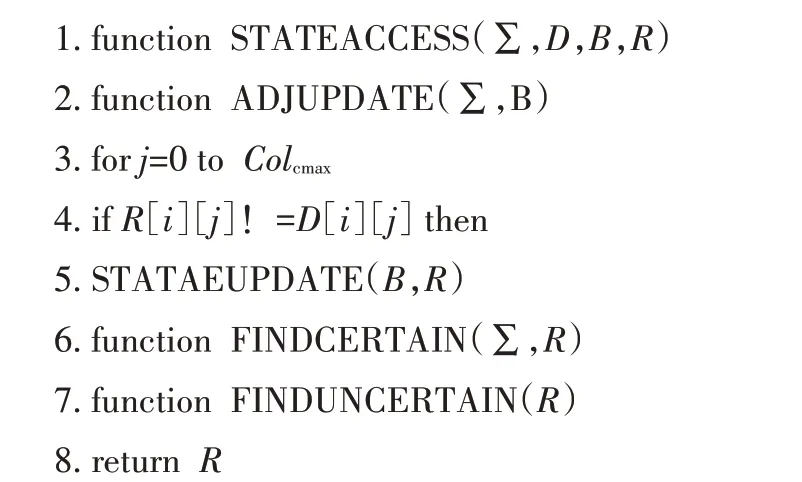
根據(jù)原系統(tǒng)中的可達(dá)矩陣信息進(jìn)行更新,第2行是對(duì)狀態(tài)之間的執(zhí)行動(dòng)作發(fā)生變更的不確定系統(tǒng)∑'的鄰接矩陣的更新;第3~5 行是對(duì)受其影響的狀態(tài)所擁有的可達(dá)信息與原系統(tǒng)中的可達(dá)矩陣進(jìn)行對(duì)比并根據(jù)原則更新可達(dá)信息,否則直接進(jìn)行下一狀態(tài)的傳遞,且當(dāng)j=Colcmax時(shí),結(jié)束更新;第6 行FINDCERTAIN(∑,R)函數(shù)是根據(jù)確定可達(dá)的狀態(tài)標(biāo)簽快速找出變動(dòng)后不確定系統(tǒng)∑',γ')其影響的狀態(tài),并需將其狀態(tài)可達(dá)信息進(jìn)行傳遞,取得受其影響的其它狀態(tài)對(duì)之間的可達(dá)信息;第7 行是對(duì)不確定系統(tǒng)∑',γ')中狀態(tài)之間的不確定可達(dá)關(guān)系進(jìn)行修正。
函數(shù)FINDCERTAIN(∑,R)的具體實(shí)現(xiàn)過程如下:

第4行收集狀態(tài)si所擁有的可達(dá)信息。第5~7行尋找狀態(tài)si確定到達(dá)的狀態(tài)并將其可達(dá)信息傳遞給狀態(tài)sk,第8 行更新狀態(tài)變更的最大編號(hào),確保受其影響的狀態(tài)都進(jìn)行了判斷。其中函數(shù)DELIVER(sk,s-i)的實(shí)現(xiàn)過程如下:

5 算法實(shí)例及仿真實(shí)驗(yàn)分析
如圖1,設(shè)∑=(S,A,γ) 為不確定狀態(tài)轉(zhuǎn)移系統(tǒng)。將通過文中描述的信息傳遞優(yōu)化算法對(duì)此轉(zhuǎn)移系統(tǒng)進(jìn)行維護(hù)。
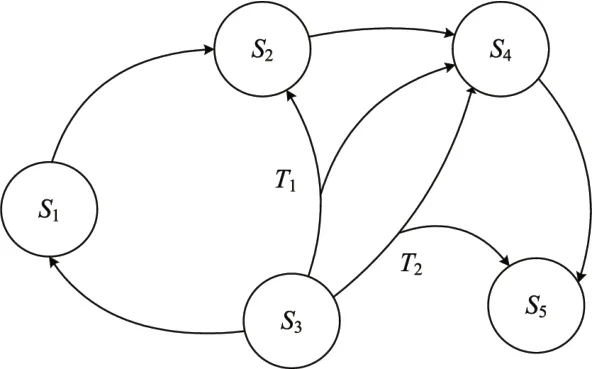
圖1 原不確定狀態(tài)轉(zhuǎn)移系統(tǒng)
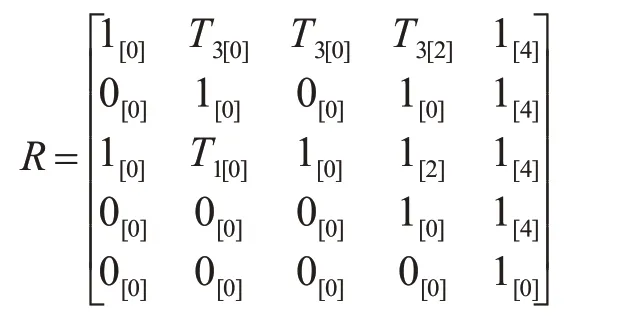
參考文獻(xiàn)[15]的算法可得該不確定系統(tǒng)的狀態(tài)可達(dá)矩陣如下:
若因?yàn)橐恍┰蚴蛊洳淮_定系統(tǒng)的狀態(tài)s1與s2由確定可達(dá)變成不確定可達(dá)T3,與其它不確定動(dòng)作進(jìn)行區(qū)分,此時(shí)的不確定狀態(tài)轉(zhuǎn)移系統(tǒng)如圖2所示。

圖2 可達(dá)關(guān)系改變后的不確定系統(tǒng)
其鄰接矩陣變更為

因狀態(tài)s1到狀態(tài)s2與s3的可達(dá)信息都發(fā)生了變動(dòng),所以需將原可達(dá)矩陣D中可達(dá)狀態(tài)s2與s3中分別滿足s-2.tag>=1 與s-3.tag>=1 的可達(dá)信息恢復(fù)到變更后的鄰接矩陣B的狀態(tài)s2與s3的對(duì)應(yīng)可達(dá)信息,此時(shí)Colcmax=3,可得:

重新將狀態(tài)s1的可達(dá)信息進(jìn)行信息傳遞,根據(jù)R[1][j].tag<1 且R[1][j]=1 的條件,可知狀態(tài)s1無法進(jìn)行轉(zhuǎn)發(fā)。
但R[i][2]≠D[i][2]且Colcmax=3,則狀態(tài)s2需重新進(jìn)行信息傳遞,根據(jù)R[2][j]=1 且R[2][j].tag<2 條件,可知R[2][3]=1,將可達(dá)矩陣R中狀態(tài)s2的可達(dá)信息傳遞給狀態(tài)s4,先將可達(dá)狀態(tài)s4的滿足S-4.tag>=2 的可達(dá)信息恢復(fù)到變更后的鄰接矩陣B的狀態(tài)s4的對(duì)應(yīng)可達(dá)信息,再將R[i][2].tag<2 的狀態(tài)可達(dá)信息進(jìn)行轉(zhuǎn)發(fā),根據(jù)傳遞規(guī)則,得:
R[2][j]=1 再由狀態(tài)s3進(jìn)行信息傳遞,根據(jù)R[3][j]=1 且R[i][3].tag<3 條件,可知R[3][1]=1 和R[3][4]=1,因此可達(dá)矩陣R中狀態(tài)s3將自己的可達(dá)信息傳遞給確定可達(dá)的狀態(tài)s1和狀態(tài)s4,此時(shí)Colcmax=4 根據(jù)信息傳遞規(guī)則可得:
R[i][4]的可達(dá)信息D[i][4]的可達(dá)信息相等,且Colcmax=4,因此不需再更新。
這樣已找出了變更后的不確定系統(tǒng)中所有確定可達(dá)關(guān)系,最后對(duì)更新后的可達(dá)矩陣R中元素值為0 的狀態(tài)可達(dá)關(guān)系進(jìn)行判斷,最終得到的可達(dá)矩陣為

仿真實(shí)驗(yàn)對(duì)比如下。
以下為采用本文改進(jìn)的信息傳遞方法維護(hù)狀態(tài)可達(dá)關(guān)系與采用信息傳遞法、矩陣相乘法重新進(jìn)行更新系統(tǒng)的狀態(tài)可達(dá)關(guān)系的實(shí)驗(yàn)結(jié)果比較,三個(gè)算法的輸入數(shù)據(jù)均相同,運(yùn)算時(shí)間如表1所示。
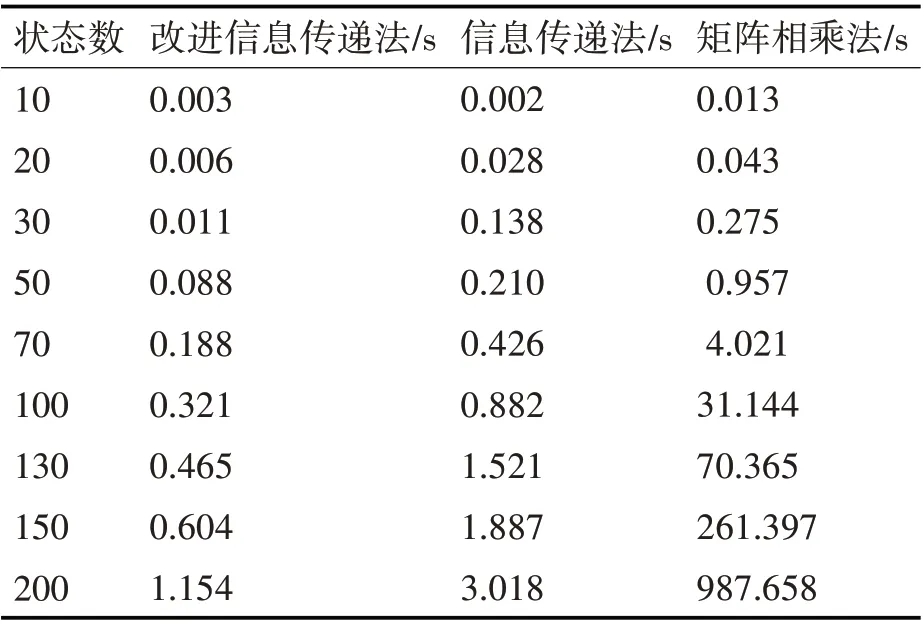
表1 運(yùn)行時(shí)間對(duì)比
當(dāng)狀態(tài)數(shù)較少時(shí),系統(tǒng)中的動(dòng)作也會(huì)比較少,狀態(tài)之間的可達(dá)路徑會(huì)屈指可數(shù)。當(dāng)系統(tǒng)中的單個(gè)動(dòng)作執(zhí)行發(fā)生變動(dòng)時(shí),可能會(huì)牽引到整個(gè)系統(tǒng)的狀態(tài)之間的可達(dá)關(guān)系的變動(dòng)。因此,此時(shí)系統(tǒng)中可達(dá)關(guān)系的局部維護(hù)與重新求解系統(tǒng)中可達(dá)關(guān)系的運(yùn)行的時(shí)間相差不大。
當(dāng)系統(tǒng)中狀態(tài)數(shù)逐漸增加時(shí),其系統(tǒng)之中的動(dòng)作也隨之增加。由于狀態(tài)之間的可達(dá)關(guān)系可以通過其它動(dòng)作的執(zhí)行與其它狀態(tài)間接取得聯(lián)系,從而一個(gè)執(zhí)行動(dòng)作的變動(dòng)一般也不會(huì)影響整個(gè)系統(tǒng)中的狀態(tài)可達(dá)關(guān)系。因此,該動(dòng)作的變動(dòng)影響的大多數(shù)是系統(tǒng)中的局部狀態(tài)之間的可達(dá)關(guān)系,從而它的求解運(yùn)算量會(huì)比重新求解系統(tǒng)中的可達(dá)關(guān)系小很多,從而提高效率,且比文獻(xiàn)[15]所運(yùn)行的時(shí)間要少。
6 結(jié)語
本文從不確定系統(tǒng)中的信息傳遞方法切入,為加強(qiáng)算法的適用性,深入挖掘各個(gè)狀態(tài)維度的可達(dá)信息,快速求解系統(tǒng)的可達(dá)關(guān)系,維護(hù)不確定系統(tǒng)的相對(duì)穩(wěn)定性。今后的進(jìn)一步工作有:
1)完善系統(tǒng)傳遞方法,進(jìn)一步提高求解效率。
2)將傳遞法的思想應(yīng)用到多Agent 系統(tǒng),或求解不確定規(guī)劃的規(guī)劃解中。
猜你喜歡
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
中華手工(2017年2期)2017-06-06 23:00:31
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
中外會(huì)展(2014年4期)2014-11-27 07:46:46