具有固定轉動軸線和變轉動軸線3T1R并聯機構構型綜合
2022-03-14 07:58:32劉宏昭胡旭宇
農業機械學報 2022年2期
劉 偉 劉宏昭 胡旭宇
(1.西安理工大學機械與精密儀器工程學院, 西安 710048; 2.西安工程大學機電工程學院, 西安 710048)
0 引言
多模式并聯機構對復雜任務具有較好的工作適應能力[1]。文獻[2]在球面4R機構上增加轉動副,使得球面4R機構處于折疊位形時,機構具有平面4R機構運動模式,從而設計了具有直線移動和球面滾動兩種模式的移動機器人。在航天領域,具有多種運動模式的并聯機構也可用來設計可展結構[3],從而適應航天運載工具的狹小空間限制。具有多模式的并聯機構可設計具有可重構性重型抓取機械手[4]。文獻[5]使用平面變胞機構,設計了可根據炮筒姿態調節的自適應彈藥輸填裝置。文獻[6]利用3-RPS并聯機構的兩種運動模式,對其結構參數進行優化使其用于腳踝關節的康復設備。
高性能的3T1R[7-8]并聯機構設計是工業應用和機構構型研究的熱點。H4[9]、I4[10]、IR4[11]、Part4[12]等3T1R型并聯機構在電子器件高速分揀以及食品與醫藥包裝自動線上具有較好的應用前景[13]。文獻[14-15]設計了零耦合度且解耦的3T1R并聯機構。文獻[16]通過兩個共軸且反向等螺距螺旋副設計了具有整周回轉能力的3T1R并聯機構。
文獻[17]使用李群理論綜合了具有兩種不同轉動方向的3T1R并聯機構。文獻[18]使用有限位移旋量設計了具有可變轉動軸線的3T1R并聯機構。文獻[19]綜合了具有3T1R和2T1R運動模式的并聯機構,且這兩個模式的轉動軸線不平行。文獻[20]分析了4-CRU并聯機構所具有的3種運動模式,其具有2種3T1R運動模式和1種1R2T運動模式,2種3T1R運動模式通過1R2T機構位形進行變換。
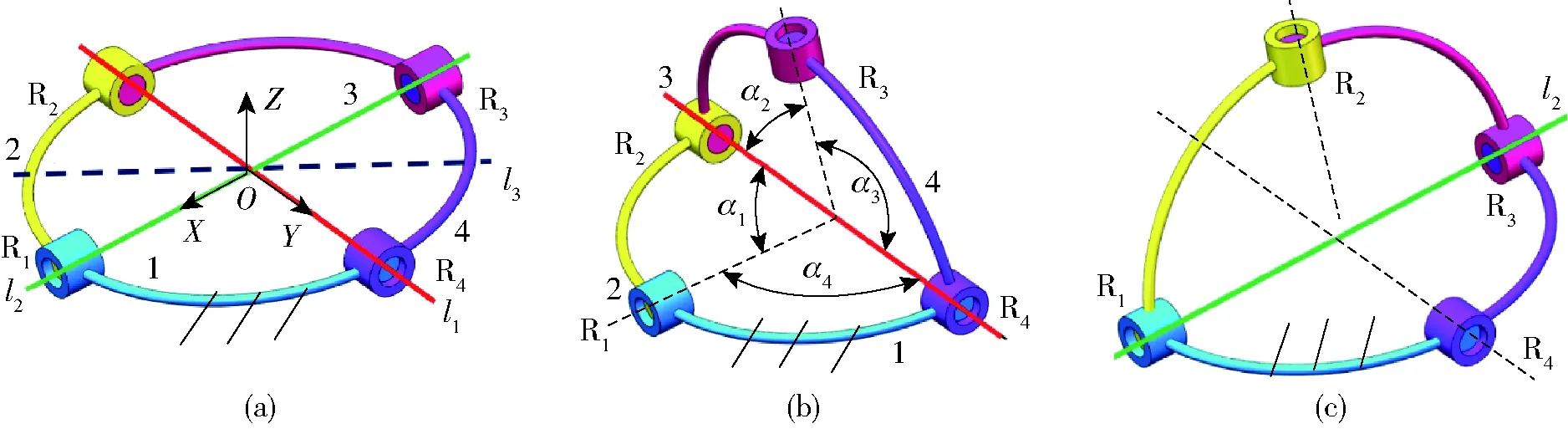
圖2 具有兩種固定轉動軸線的球面4R機構運動模式變換Fig.2 Motion mode transformation of spherical 4R mechanism with two fixed rotation axes
目前,具有多種3T1R運動模式的并聯機構構型有限,該3T1R運動模式下轉動運動的軸線方向只能在兩個方向上變換。具有固定轉動軸線和變轉動軸線3T1R運動模式的并聯機構在應用于移動式調姿平臺或機器人手腕具有一定的前景。本文在對具有固定轉動軸線和變轉動軸線的球面4R機構進行分析的基礎上,綜合一類具有變轉動軸線和固定轉動軸線的3T1R并聯機構。
1 具有兩種定軸線轉動運動模式的球面4R機構
圖1為一種球面4R機構的結構簡圖,圖2為其三維模型圖。如圖2a所示球面4R機構,4個轉動副軸線分別與X、Y軸重合,相鄰轉軸軸線夾角α12=α23=α34=α41=90°。
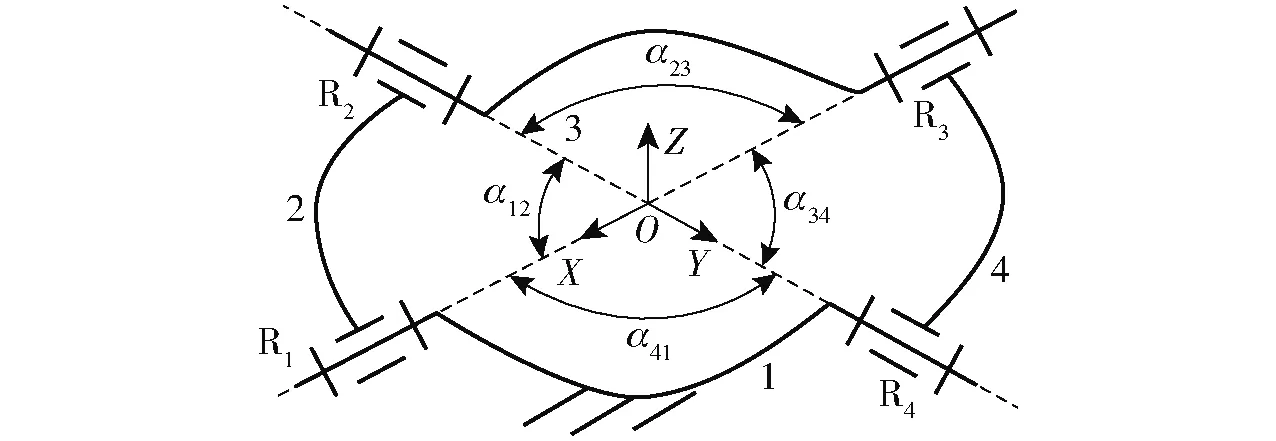
圖1 兩種固定轉動軸線的球面4R機構簡圖Fig.1 Sketch of spherical 4R mechanisms with two fixed rotation axes
當機構處于圖2a所示位形時,運動鏈R1R2和R4R3施加在連桿3上的約束旋量在坐標系OXYZ中均可表示為
(1)
在圖2a所示機構位形下,由于運動鏈R1R2和R4R3施加在連桿3上的4個約束旋量相同,動平臺上施加的約束系存在4個冗余約束,采用修正的Kutzbach-Grübler公式計算機構自由度,即
M=6(n-g-1)+∑fi+υ-ζ
(2)
式中M——機構自由度
n——機構構件總數
g——機構運動副數
fi——第i個運動副的自由度
υ——冗余約束數
ζ——局部自由度
計算得自由度為2。對連桿3上的約束系計算與其互易積為零的旋量系,可知在圖2a所示位形下,連桿3可以過點O在XOY平面上的任意兩條軸線做瞬時轉動。然而,上述過點O在XOY平面上的轉動軸線,并不全是連桿3的連續轉動軸線,需要對XOY平面上的轉動軸線的連續性進行判斷[21-22]。轉動軸線的連續性可通過建立機構運動學方程進行分析。文獻[23]給出球面4R機構運動學計算式為
c1(s12Y4)+s1(s12X4)+(c12Z4-c23)=0
(3)
其中
X4=s34s4
Y4=-(s41c34+c41s34c4)
Z4=c41c34-s41s34c4
式中sij、cij——轉軸i轉動到j的正弦函數和余弦函數
si、ci——轉軸Ri轉角的正弦函數和余弦函數
將s12=s23=s34=s41=1,c12=c34=0代入式(3)得到
s1s4=0
(4)
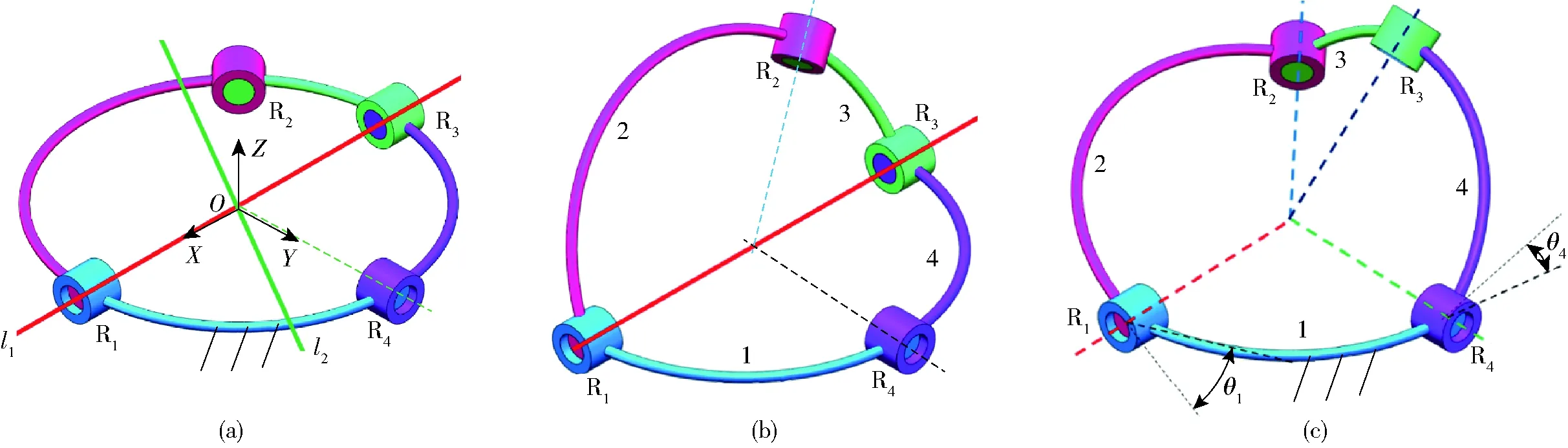
圖4 具有固定轉動和變轉動軸線球面4R機構運動模式變換Fig.4 Motion mode transformation of spherical 4R mechanism with fixed and variable rotation axis
假設圖2a中連桿3繞一般軸線l3做有限轉動,R1和R4的轉角都應不為零,將其代入式(4),等式兩邊不相等,因而軸線l3不是連續轉動軸線。由式(4)可知,當轉動副R4的轉角不為零時,轉動副R1的轉角必為零,此時機構位形如圖2b所示,連桿3繞固定轉動軸線l1做連續轉動;當轉動副R1的轉角不為零時,轉動副R4的轉角必為零,此時機構位形如圖2c所示,連桿3繞固定軸線l2做連續轉動。由于機構離開圖2a所示位形后,機構自由度減少為1,發生了改變,因而圖2a所示機構位形下,機構具有兩個自由度是瞬時的,且連桿3的兩個連續轉動軸線分別為l1和l2,即圖2所示4R機構的連桿3具有兩種運動模式,分別為沿軸線l1和l2的固定軸線轉動。文獻[15]利用圖2所示空間4R機構的該特征,設計了具有兩種3T1R運動模式并聯機構。
2 具有固定轉動軸線和變轉動軸線兩種轉動運動模式的球面4R機構
當圖3中空間4R機構的結構參數αij取一般值時,空間4R機構連桿的瞬時轉動軸線不是固定的,而是在不斷發生變化,文獻[16]根據這一點設計了具有變轉動軸線的3T1R并聯機構。α12=α,α23=180°-α,α34=90°,α41=90°時,該空間4R球面機構簡圖如圖3所示,取α=120°,該空間4R球面機構的三維模型圖如圖4所示。

圖3 具有固定轉動軸線和變轉動軸線兩種模式的球面4R機構運動簡圖Fig.3 Sketch of spherical 4R mechanism with two motion modes with fixed rotation axis and variable rotation axis
當機構處于圖4a所示位形時,運動鏈R1R2和R4R3施加在連桿3上的約束旋量系在坐標系OXYZ中均與式(1)相同,因而圖4a中機構有兩個自由度,需要對這兩個轉動自由度的瞬時性和轉動軸線的連續性進行判斷。將s12=s23,c12=-c23,s34=s41=1,c34=c41=0,代入式(3)得到
s1s12s4-c12c4+c12=0
(5)
2.1 變轉動軸線運動模式
當R4的轉角不為零時,式(5)可寫成
(6)
根據式(6)可知,R4的轉角不為零時,R1的轉角也不為零。轉動副R1、R4做有限轉動后,連桿3在特定位形下的瞬時轉動軸線應為軸線R1與R2所在平面П1與軸線R4與R3所在平面П2的交線,該交線也是上述兩平面法線的共垂線。在圖4a所示位形下,當轉動副R4轉動有限角度θ4后,轉動副R1轉動有限角度θ1,平面П2的法線從圖4a所示的沿Z軸方向,繞轉軸R4,即Y軸轉動θ4;平面П1的法線從圖4a所示的沿Z軸方向,繞轉軸R1,即繞X軸轉動-θ1。
平面П1的法線在OXYZ坐標系中為
(7)
平面П2的法線在OXYZ坐標系中為
(8)
平面П1、П2法線的共垂線平行于向量(-c4s1,-s4c1,s4s1)T,可寫成(c4s1/(s4c1),1,-s1/c1)T。將式(6)代入平面П1、П2法線的共垂線方向向量的第3個分量得到
(9)
平面П1、П2法線的共垂線方向向量的第1個分量為
(10)

第1分量的“±”號,是由于當圖4所示機構θ4一定時,θ1具有兩個解,如圖5所示。圖5a中R4的轉角θ4與圖5b中R4的轉角相同,機構具有兩種位形。圖5a所示機構位形下,軸線l2是連桿3在機構圖5a位形下的瞬時連續轉動軸線;圖5b中軸線l′2是連桿3的瞬時轉動軸線。結合連桿3的瞬時連續轉動軸線向量和圖5的幾何分析,可知當R4的轉角θ4→0時,圖5所示機構有兩種位形,連桿3有兩個連續轉動軸線l2、l′2,且由于平面П1與平面П2在空間不斷連續變化,因而其交線在空間連續不斷變化,即轉動軸線l2、l′2在空間連續變化。

圖5 θ4微小轉角對應的兩個球面4R機構位形圖Fig.5 Two configuration diagrams of spherical 4R mechanism when θ4 had small value
2.2 固定轉動軸線運動模式
轉軸R4轉角為0時,即s4=0,c4=1時,式(5)可寫成
-c12+c12=0
(11)
此時該空間4R機構位形如圖4b所示,轉軸R1的轉角任意選取,這種情況下,連桿3沿定軸線l1連續轉動,此時連桿3具有固定轉動軸線1維轉動運動模式。
2.3 奇異位形
圖4a所示機構處于R1、R4的轉角均為零的位形。式(10)中轉軸R4的轉角θ4→0時,考慮到機構運動的連續性,機構從圖5a所示位形下不能在R4的轉角θ4→0時,運動到圖5b所示位形下,結合2.1、2.2節的分析結果,可知機構在圖4a所示位形下,連桿3具有兩個連續轉動軸線,分別為l1、l2,轉動軸線l1保持固定,轉動軸線l2隨R4的轉角θ4的變化在空間中連續變化。在圖4a所示位形下,機構處于奇異位形,當鎖定轉動副R4的轉角θ4,令其為零,控制轉動副R1的轉角θ1,可使得連桿3繞固定轉動軸線l1連續轉動;當控制轉動副R4的轉角θ4(且令其不等于零),控制轉動副R1的轉角θ1,可使得連桿3繞變轉動軸線l2連續轉動。
綜上所述,圖4所示機構具有兩種運動模式,可通過對轉動副R1、R4的控制,實現機構在圖4a所示變換位形下,在兩種不同運動模式之間的變換。值得注意的是,該空間4R機構的兩種運動模式性質不同,一種為沿固定軸線轉動,該運動屬于1維轉動位移子群;另一種轉動軸線在空間連續變化,該運動屬于1維轉動位移流形。利用這種空間4R球面機構所具有的運動特性,可設計具有固定轉動軸線和變轉動軸線兩種運動模式的3T1R并聯機構。
3 具有固定轉動軸線和變轉動軸線的兩種3T1R運動模式的并聯機構
由圖4機構的運動特性可知,空間4R球面機構的結構參數α12=α,α23=180°-α,α34=90°,α41=90°,且α≠90°時,空間4R機構具有兩種運動模式,連桿具有固定轉動軸線和變轉動軸線的兩種1維轉動運動模式。將3個沿坐標系,移動方向正交的移動副串聯后,連接圖4所示機構的連桿1后,連桿3所具有的運動可用位移流形表示為
{TX}{TY}{TZ}({R(X)}∪{R(v)})=
{TX}{TY}{TZ}{R(X)}∪{TX}{TY}{TZ}{R(v)}
(12)
式中 {R(X)}——1維轉動位移子群[24],轉軸平行于X軸
{TX}、{TY}、{TZ}——沿坐標軸的1維移動子群
v——可變的轉動軸線,這種特殊的轉動運動并不屬于12種位移子群
{R(v)}——1維轉動位移流形
{TX}{TY}{TZ}{R(v)}不屬于12種位移子群,代表4維位移流形。式(12)中的({R(X)}∪{R(v)})表示兩種運動模式的并集,根據產生這種運動的生成元,可寫成
({R(X)}∪{R(v)})=
{R(X)}{R(u)}∩{R(Y)}{R(X)}
(13)
式(13)中{R(X)}{R(u)}對應的生成元為圖4的支鏈R1R2,式(13)中{R(Y)}{R(X)}對應的生成元為圖4中的支鏈R4R3,結合式(12),得到
{TX}{TY}{TZ}({R(X)}∪{R(v)})=
{TX}{TY}{TZ}({R(X)}{R(u)}∩
{R(Y)}{R(X)})=
{TX}{TY}{TZ}{R(X)}{R(u)}∩
{TX}{TY}{TZ}{R(Y)}{R(X)}
(14)
由于兩種3T1R運動模式都具有4個自由度,使用式(14)中位移流形{TX}{TY}{TZ}{R(X)}{R(u)}、{TX}{TY}{TZ}{R(Y)}{R(X)}對應的運動鏈作為并聯機構的兩條支鏈,再加上2個與其結構相同的并聯支鏈后,支鏈末端的運動求交,運動不會發生改變。支鏈1的結構為ZPYPXPXRuR,支鏈1與支鏈3的機構相同,令向量X轉到u的轉角為α,支鏈2的結構為YPXPZPYRXR,支鏈2與支鏈4的機構相同,機構的結構簡圖如圖6所示。文獻[25]根據移動副和轉動副的數目列舉了PPPRR類型的運動鏈。可選取RRRRR支鏈進行建模,其結構簡圖如圖7所示。運動鏈B1A1的結構為YRYRYRuRuR。旋轉軸R13和旋轉軸R14之間的角度為60°。運動鏈B1A1的結構與運動鏈B3A3的結構相同。運動鏈B2A2的結構為XRXRXRYRYR。運動鏈B2A2的結構與運動鏈B4A4的結構相同。運動鏈3對動平臺施加的約束與運動鏈1對動平臺施加的約束相同。運動鏈4對動平臺施加的約束與運動鏈2對動平臺施加的約束相同。
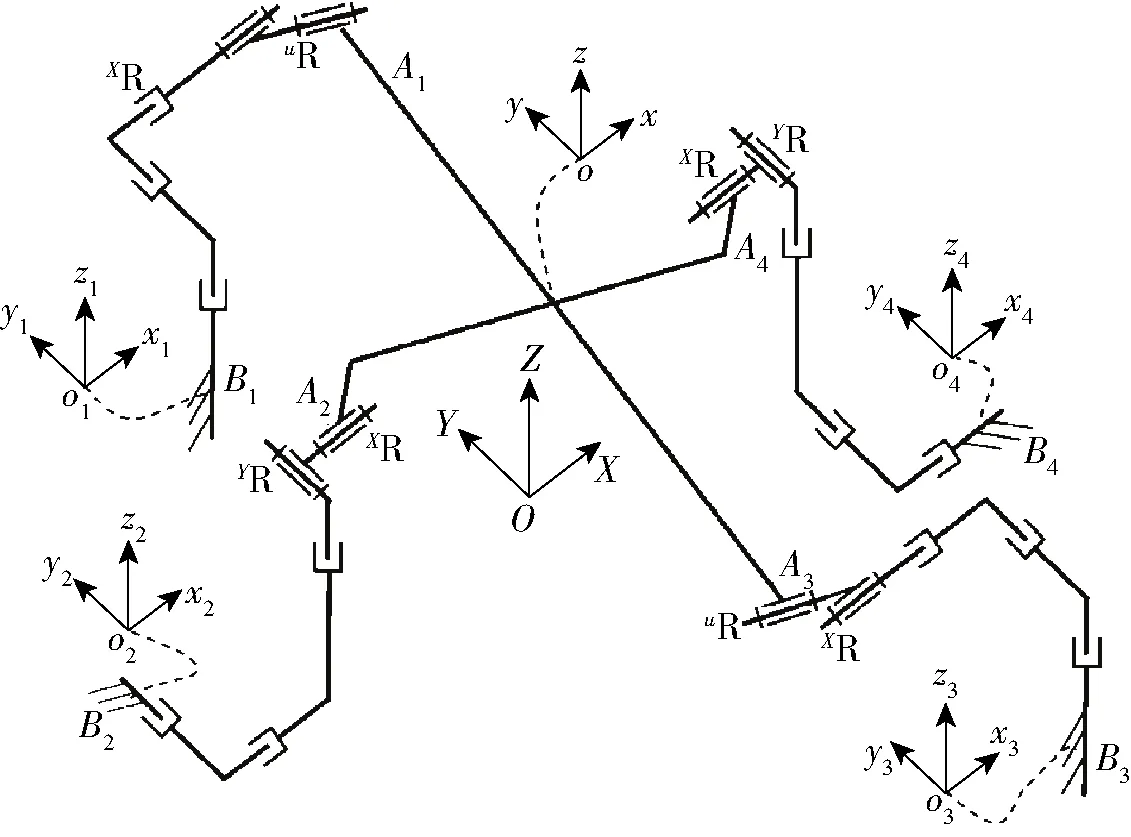
圖6 具有固定轉動軸線和變轉動軸線的3T1R并聯機構簡圖Fig.6 Sketch of 3T1R parallel mechanism with fixed and variable rotation axis
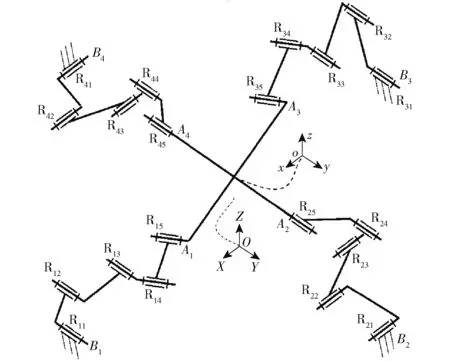
圖7 不含有被動副的具有固定轉動軸線和變轉動軸線的3T1R并聯機構簡圖Fig.7 Sketch of 3T1R parallel mechanism with fixed andvariable rotation axis without passive moving pair
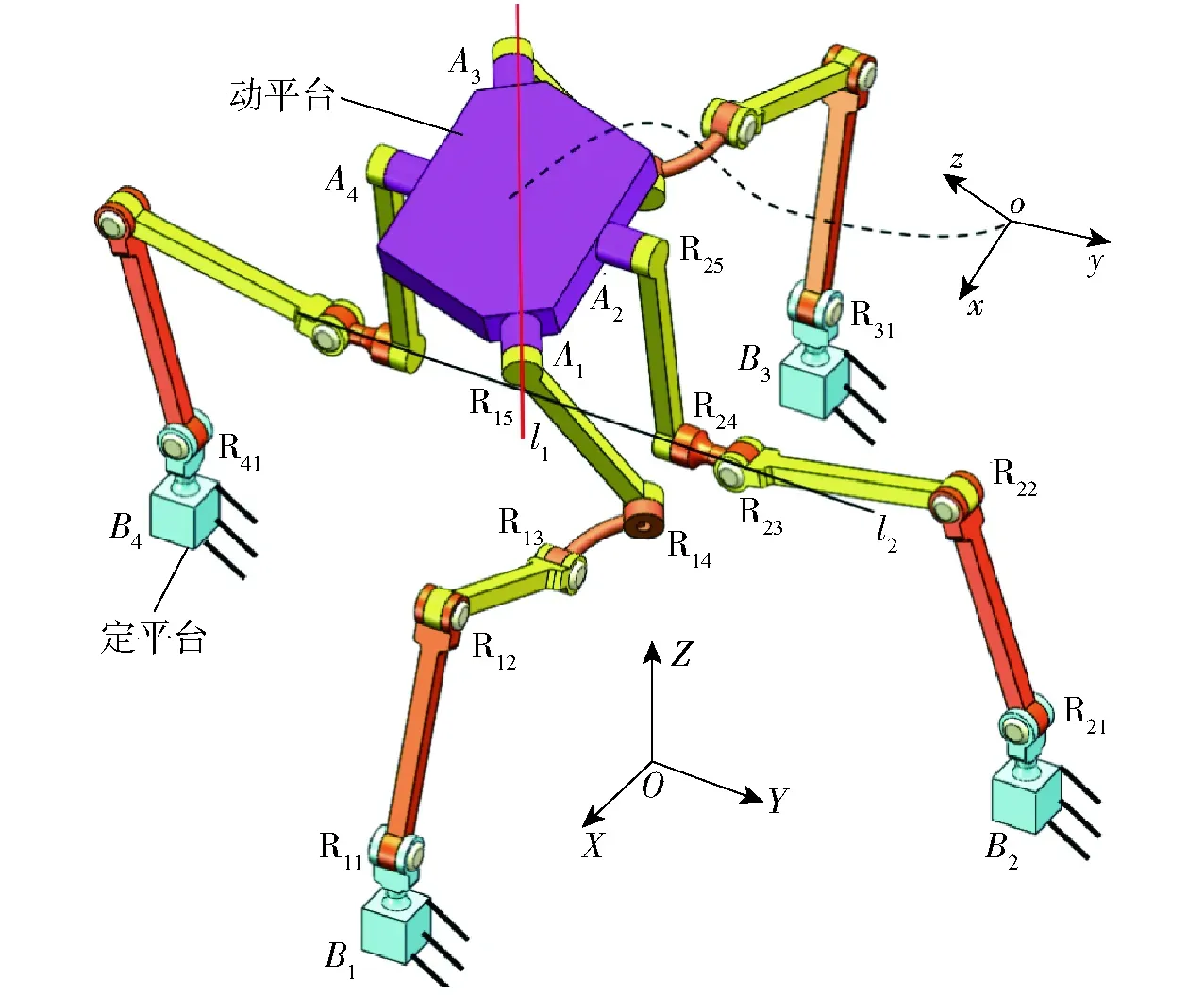
圖8 定軸線3T1R運動模式Fig.8 Fixed axis 3T1R motion mode
3.1 固定轉動軸線3T1R運動模式
3.1.1自由度分析
如圖8所示支鏈B1A1的結構為YRYRYRuRuR。轉軸R13和轉軸R14之間的角度為60°。運動鏈B1A1的結構與運動鏈B3A3的結構相同。運動鏈B2A2的結構為XRXRXRYRYR。運動鏈B2A2的結構與運動鏈B4A4的結構相同。運動鏈3對動平臺施加的約束與運動鏈1對移動平臺施加的約束相同。運動鏈4對動平臺施加的約束與運動鏈2對動平臺施加的約束相同。在圖8中,運動鏈B1A1、B2A2施加在動平臺上的約束旋量可以在固定坐標系OXYZ中表示為
(15)
支鏈1與支鏈3,支鏈2與支鏈4施加在動平臺上的約束相同,在機構的一般位形下,動平臺上施加的約束系存在冗余約束,υ=2,采用修正的Kutzbach-Grübler公式計算機構的自由度為4。
結合動平臺上的約束,對其求解互易積,可知機構在圖8所示位形下,具有3T1R運動模式,轉動軸線平行于Y軸。根據文獻[26]中的方法判定運動模式是否瞬時,對應每一個自由度和其性質依次給出相對起始位型的一個足夠小的有限位移量。可以驗證該3T1R運動模式是全周的。
3.1.2固定轉動軸線3T1R模式驅動副選擇合理性分析
選擇轉動副R11、R21、R31和R41作為驅動副。當驅動副R11、R21、R31和R41在圖8中被鎖定時,施加到動平臺的驅動力旋量為
(16)

鎖定4個驅動副后,該機構具有0自由度。在圖8所示的機構位形下,所選擇的4個驅動副可實現機構在固定轉動軸線3T1R運動模式下的控制。
3.2 3T1R運動模式變換位形
3.2.1機構自由度分析
機構在圖8所示位形繞平行于Y軸的軸線轉動后,機構處于圖9所示機構位形,此位形下,4條支鏈中的轉動副軸線均平行于OXY平面。運動鏈1、2施加在動平臺上的約束旋量可以在固定坐標系OXYZ中表示為
(17)

圖9 運動模式變換位形Fig.9 Motion mode transformation configuration

機構具有5個自由度,結合動平臺上的約束,對其求解互易積,可知機構在圖9所示位形下,具有3T2R運動。根據3.1節的分析可知,當機構從圖9所示位形繞平行于Y軸的軸線轉動后,機構進入固定轉動軸線3T1R運動模式,因而圖9所示機構具有的3T2R運動是瞬時的。
3.2.2驅動副選擇的合理性分析
在圖9所示機構位形下,驅動副R11、R21、R31和R41被鎖定后,施加到動平臺的驅動力旋量為
(18)
由式(17)、(18)組成的旋量系可知,在圖9的機構位形下,旋量系中的8個旋量是線性相關的。施加在移動平臺上的約束旋量系中有3個冗余約束υ=3,計算機構的自由度為1。
鎖定機構4個驅動副后,該機構有1個自由度。在圖9所示的機構位形下,所選的4個驅動副無法實現機構運動模式變換。因而需要增加1個輔助驅動副,來實現機構運動模式的變換。選擇轉動副R12作為輔助驅動副。鎖定該驅動副后,作用在動平臺上的驅動力旋量為
(19)
由式(17)~(19)組成的旋量系可知,在機構的運動模式變換位形下,該9個旋量線性相關。在動平臺上作用的約束旋量系中有3個冗余約束υ=3,計算機構的自由度為0。
鎖定4個驅動副和1個輔助驅動副后,該機構自由度為0。在圖9所示的配置下,4個驅動副和1個輔助驅動副可以實現機構3T2R瞬時自由度位形下的控制。
3.3 變轉動軸線3T1R運動模式
3.3.1機構自由度分析
控制圖9中4個驅動副和1個輔助驅動副,使得機構處于圖10所示機構位形,支鏈1、2施加在動平臺上的約束旋量,在定坐標系OXYZ中可表示為
(20)
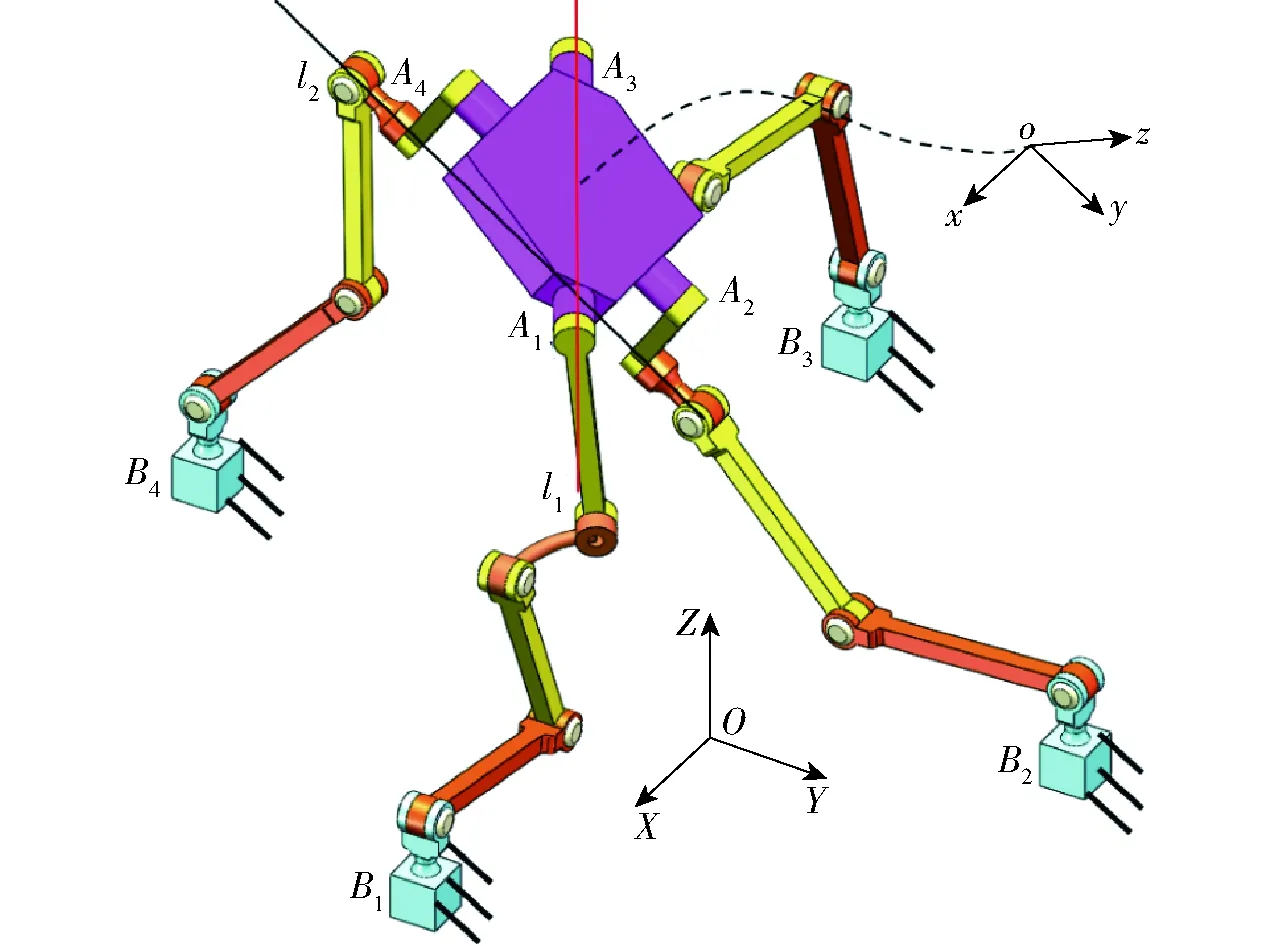
圖10 變軸線3T1R運動模式Fig.10 Variable axis 3T1R motion mode
由于支鏈1與支鏈3,支鏈2與支鏈4施加在動平臺上的約束相同,在機構的一般位形下,動平臺上施加的約束系存在冗余約束,υ=2,采用修正的Kutzbach-Grübler公式計算機構自由度為4。

3.3.2驅動副選擇的合理性分析
當驅動副R11、R21、R31和R41在圖10中被鎖定時,4個支鏈施加到動平臺上的驅動力旋量為
(21)
由式(20)、(21)組成的旋量系可知,在機構的一般構型下,旋量系中的8個旋量在變轉動軸線的3T1R運動模式下線性相關。施加在動平臺上的約束旋量系中有兩個冗余約束υ=2,計算機構的自由度為0。
鎖定4個驅動副后,該機構自由度為0。在圖10所示機構位形下,選擇的4個驅動副可以實現機構在變轉動軸線3T1R運動模式下機構的控制。
綜上所述,圖10所示的機構具有固定轉動軸線和變轉動軸線的兩種3T1R運動模式。可以使用4個驅動副來控制機構的這兩種運動模式。當機構運動模式改變時,機構支鏈中需要增加一個輔助驅動副。輔助驅動副只在機構運動模式變換位形下工作。
4 結論
(1)通過分析空間4R球面機構的一般運動學方程,對一種具有特殊結構參數的空間4R球面機構具有的運動模式進行了討論,結果表明該空間球面4R機構的連桿具有兩種運動模式,其具有固定轉動軸線和變轉動軸線兩種轉動運動模式。
(2)使用位移流形理論對具有固定轉動軸線和變轉動軸線兩種運動模式的3T1R并聯機構進行了綜合,在機構運動模式變換的不同位形下,進行了機構自由度和驅動副選取合理性的驗證,結果表明該類機構能實現兩種模式的運動,在機構運動模式變換位形下,使用輔助驅動副可以實現機構運動模式變換。
