一種3(Ra)PS變胞并聯(lián)機(jī)構(gòu)構(gòu)型與運(yùn)動(dòng)學(xué)分析
2022-03-14 07:58:32李端玲雷志強(qiáng)張?jiān)_(kāi)
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2022年2期
賈 璞 李端玲 雷志強(qiáng) 張?jiān)_(kāi) 楊 超
(1.北京郵電大學(xué)自動(dòng)化學(xué)院, 北京 100876; 2.陜西科技大學(xué)機(jī)電工程學(xué)院, 西安 710021)
0 引言
傳統(tǒng)的并聯(lián)機(jī)構(gòu)具有恒定的拓?fù)浣Y(jié)構(gòu)和固定的自由度[1],這限制它們的多功能性和適應(yīng)性。隨著工業(yè)快速定制和環(huán)境變化的要求,可以適應(yīng)不同場(chǎng)景的可重構(gòu)并聯(lián)機(jī)構(gòu)成為近年來(lái)機(jī)構(gòu)研究的熱點(diǎn)。近年來(lái)學(xué)者們進(jìn)行許多可重構(gòu)并聯(lián)機(jī)構(gòu)(RPM)的研究。在此基礎(chǔ)上,也產(chǎn)生了一類(lèi)具有自適應(yīng)性和可重構(gòu)特性的變胞并聯(lián)機(jī)構(gòu)(MPMS)[2]。DAI等[3]提出用于裝飾性紙箱折疊和可重構(gòu)包裝研究的變胞機(jī)構(gòu)。YAN等[4-5]研究運(yùn)動(dòng)關(guān)節(jié)的可變構(gòu)型,給出變胞關(guān)節(jié)的構(gòu)型表示。KONG[6-7]使用基于螺旋理論構(gòu)造出具有多種操作模式的RPM。現(xiàn)有可實(shí)現(xiàn)RPM具有可重構(gòu)特性的方法主要包括引入變幾何約束或可鎖定的鉸鏈[8-10],以及在運(yùn)動(dòng)支鏈中集成一些可重構(gòu)連桿機(jī)構(gòu)[11]。LI等[12]使用基于位移子群的方法提出一類(lèi)帶有Schoenflies運(yùn)動(dòng)分支的RPM。GAN等[13-15]發(fā)明變胞rT鉸鏈和rR鉸鏈,并提出使用這些鉸鏈構(gòu)造RPM的方法。ZHANG等[16]提出vA(可變軸線)鉸鏈,其靈感來(lái)自于折紙,并已將其集成到多個(gè)RPM中。CARBONARI等[17]通過(guò)引入特殊的可鎖定萬(wàn)向節(jié)設(shè)計(jì)一類(lèi)RPM。這些變胞或可鎖定鉸鏈的構(gòu)態(tài)變化會(huì)導(dǎo)致RPM的自由度發(fā)生變化。文獻(xiàn)[18-19]通過(guò)整合運(yùn)動(dòng)支鏈中的可重構(gòu)連桿,提出幾種RPM,并對(duì)含有vA鉸的并聯(lián)機(jī)構(gòu)建立涵蓋所有構(gòu)型的運(yùn)動(dòng)學(xué)模型。胡旭宇等[20-21]提出一系列含恰約束支鏈的并聯(lián)機(jī)構(gòu)和球面變胞仿生機(jī)構(gòu)。暢博彥等[22]研究了一種變胞機(jī)構(gòu)運(yùn)動(dòng)參數(shù)輸入與輸出之間的映射關(guān)系。沈惠平等[23]通過(guò)拓?fù)浣雕钤O(shè)計(jì)一種實(shí)現(xiàn)一平移兩轉(zhuǎn)動(dòng)的并聯(lián)機(jī)構(gòu),并推導(dǎo)出其符號(hào)正反解。溫如鳳等[24]提出具有耦合分支的兩轉(zhuǎn)兩移型并聯(lián)機(jī)構(gòu),并對(duì)其剛度、工作空間等性能進(jìn)行對(duì)比分析。
本文研究一種由新型變胞鉸鏈Ra鉸組建而成的3(Ra)PS變胞并聯(lián)機(jī)構(gòu)。重點(diǎn)分析3(Ra)PS并聯(lián)機(jī)構(gòu)的構(gòu)型,針對(duì)不同構(gòu)型使用螺旋理論驗(yàn)證構(gòu)型的自由度變化特點(diǎn)。根據(jù)Sylvester結(jié)式消去法,利用Mathematica符號(hào)工具對(duì)3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的所有構(gòu)型進(jìn)行正、逆運(yùn)動(dòng)學(xué)分析求解和數(shù)值驗(yàn)證。以期為變胞并聯(lián)機(jī)構(gòu)的設(shè)計(jì)提供思路,為多構(gòu)型并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)建模提供新的方法。
1 可重構(gòu)(Ra)PS支鏈
可重構(gòu)(Ra)PS支鏈由Ra鉸鏈、P副(移動(dòng)副)和S副(球副)組成。該支鏈的可重構(gòu)特性來(lái)源于Ra鉸鏈的結(jié)構(gòu)變化。如圖1所示,Ra鉸具有3個(gè)旋轉(zhuǎn)自由度(DOFs),這3個(gè)自由度分別來(lái)自于3個(gè)垂直交叉的旋轉(zhuǎn)軸(外軸、內(nèi)軸和垂直軸)。Ra鉸的外軸為一個(gè)方向固定的軸,內(nèi)軸可在開(kāi)槽環(huán)內(nèi)旋轉(zhuǎn),改變自身在開(kāi)環(huán)槽中的位置。此外,垂直軸用于為內(nèi)軸位置的位置變化提供旋轉(zhuǎn)。開(kāi)槽環(huán)用于固定內(nèi)軸線兩端的滑塊,并通過(guò)滑塊沿開(kāi)槽環(huán)的內(nèi)槽自由旋轉(zhuǎn)和固定,使其具有改變內(nèi)軸位置方向的能力。

圖1 Ra鉸三維模型Fig.1 Structural diagram of Ra joint1.定位孔 2.保持架 3.開(kāi)槽環(huán) 4.滑塊
如圖2所示,內(nèi)軸位置的變化可使Ra鉸鏈的自由度發(fā)生改變,從而導(dǎo)致(Ra)PS支鏈具有2個(gè)不同的構(gòu)態(tài)。在圖2a中,內(nèi)軸與外軸垂直,此時(shí)支鏈等效為SPS支鏈,為(Ra-1)PS支鏈,在圖2b中,內(nèi)軸與外軸共線,支鏈等效為UPS支鏈,為(Ra-2)PS支鏈。

圖2 (Ra)PS支鏈的兩種構(gòu)型Fig.2 Two configurations of (Ra)PS limb
如圖2a所示,在Ra鉸鏈中心處設(shè)置一個(gè)支鏈坐標(biāo)系o1x1y1z1,x1軸與外軸共線,y1軸位于保持架平面內(nèi)并垂直于外軸,z1軸的建立符合右手準(zhǔn)則。(Ra-1)PS支鏈的運(yùn)動(dòng)螺旋系統(tǒng)為
(1)
式中β——支鏈($13)與平面y1o1z1之間的夾角
α——支鏈$13與平面x1o1y1的夾角
l——Ra鉸鏈中心和球鉸中心之間的距離
符號(hào)cα和sα分別表示cosα和sinα。當(dāng)Ra鉸處于(Ra-1)構(gòu)型時(shí),β、γ(γ為內(nèi)軸線與外軸線的夾角)都不為零,當(dāng)Ra鉸處于(Ra-2)構(gòu)型時(shí),β和γ為零但α不為零,在旋量符號(hào)$ij中,下標(biāo)i表示支鏈編號(hào),下標(biāo)j表示支鏈內(nèi)的運(yùn)動(dòng)副編號(hào)。式(1)中的7個(gè)螺旋形成一個(gè)六階系統(tǒng),這表明(Ra-1)PS支鏈具有6個(gè)自由度(DOFs),并且對(duì)與其連接的動(dòng)平臺(tái)不提供任何約束。
對(duì)如圖2b所示的(Ra-2)PS支鏈建立的運(yùn)動(dòng)旋量系統(tǒng)為

圖3 3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的4種構(gòu)型Fig.3 Four configurations of 3(Ra)PS metamorphic parallel mechanism

(2)
從式(2)可以看出,旋量$12和$16相同,并且6個(gè)旋量形成一個(gè)五階螺旋系統(tǒng)。因此,對(duì)支鏈的運(yùn)動(dòng)螺旋系統(tǒng)中求反螺旋可以得到(Ra-2)PS支鏈的約束螺旋為
(3)
從式(3)可知,這個(gè)支鏈提供一個(gè)作用于球鉸中心且平行于支鏈Ra鉸外軸線的約束力,導(dǎo)致球鉸中心A1被約束在垂直于外軸線的平面y1o1z1內(nèi),除此之外支鏈位于該平面內(nèi)。因此球鉸中心A1只能在平面上移動(dòng)。因此,(Ra-2)PS支鏈有5個(gè)自由度,比(Ra-1)PS構(gòu)型少1個(gè)自由度。
2 3(Ra)PS并聯(lián)機(jī)構(gòu)構(gòu)型分析
如圖3所示,將3個(gè)(Ra)PS支鏈分別與動(dòng)平臺(tái)和底座連接,三支鏈對(duì)稱布置,此時(shí)可以獲得4種不同構(gòu)型的并聯(lián)機(jī)構(gòu)。
其中點(diǎn)Ai為球形鉸鏈的中心點(diǎn),點(diǎn)Bi為支鏈i的Ra鉸鏈中心,在等邊三角形B1B2B3的幾何中心O處建立定位坐標(biāo)系OXYZ,其中X軸平行于B2B3,Y軸穿過(guò)B1并垂直于B2B3,Z軸垂直于底座。如圖3a所示,將3個(gè)(Ra-2)PS支鏈與底座和動(dòng)平臺(tái)連接可組成3(Ra-2)PS變胞并聯(lián)機(jī)構(gòu),根據(jù)式(2)中的幾何約束可知,當(dāng)支鏈為(Ra-2)PS時(shí),球鉸中心Ai被約束在平面Σ0上。
根據(jù)上述描述,點(diǎn)Ai和Bi在全局坐標(biāo)系中的位置矢量可表示為
(4)
式中支鏈i和矢量OBi之間的夾角為αi,定坐標(biāo)系中的點(diǎn)Ai和Bi的位置矢量分別為ai、bi,球鉸鏈中心Ai與Ra鉸鏈中心之間的距離為li。rb為底座外接圓半徑。
從式(4)可以看出,每一個(gè)(Ra-2)PS的支鏈對(duì)動(dòng)平臺(tái)提供一個(gè)過(guò)球副中心且平行于Ra鉸外軸方向的約束力。因此,圖3a中3(Ra-2)PS并聯(lián)機(jī)構(gòu)在全局坐標(biāo)系下的約束螺旋系統(tǒng)可表示為

(5)
對(duì)式(5)求反螺旋,動(dòng)平臺(tái)的運(yùn)動(dòng)螺旋可表示為
(6)
由式(6)可知,支鏈對(duì)稱分布的3(Ra-2)PS并聯(lián)機(jī)構(gòu)具有分別沿X、Y軸的2個(gè)旋轉(zhuǎn)自由度和沿著Z軸的1個(gè)移動(dòng)自由度。
將3(Ra-2)PS并聯(lián)機(jī)構(gòu)中的支鏈從(Ra-2)PS改為(Ra-1)PS后,將產(chǎn)生具有更多自由度的構(gòu)型。將支鏈1的構(gòu)態(tài)從Ra-2改變?yōu)镽a-1后,3(Ra-2)PS變?yōu)槿鐖D3b所示的2(Ra-2)PS-1(Ra-1)PS構(gòu)型,其中在支鏈2和3分別具有一個(gè)平行于各自Ra鉸外軸線的約束力。基于約束螺旋分析,2(Ra-2)PS-1(Ra-1)PS并聯(lián)機(jī)構(gòu)具有4個(gè)自由度,1個(gè)平移和3個(gè)旋轉(zhuǎn)(3R1T)。
進(jìn)一步改變支鏈的構(gòu)態(tài),如圖3c所示的構(gòu)型為2(Ra-1)PS-1(Ra-2)PS構(gòu)型,此時(shí)只有支鏈3具有1個(gè)力約束,其余兩個(gè)支鏈對(duì)平臺(tái)沒(méi)有約束。因此,該機(jī)構(gòu)具有5個(gè)自由度,其中包括3個(gè)旋轉(zhuǎn)和2個(gè)平移的自由度(3R2T)。
當(dāng)將第3支鏈的構(gòu)態(tài)都改變?yōu)?Ra-1)PS時(shí),此時(shí)機(jī)構(gòu)的構(gòu)型為3(Ra-1)PS,如圖3d所示,該構(gòu)型3(Ra-1)PS對(duì)平臺(tái)沒(méi)有任何約束螺旋且并聯(lián)機(jī)構(gòu)具有6個(gè)自由度。
3 變胞并聯(lián)機(jī)構(gòu)的驅(qū)動(dòng)方案
由第2節(jié)對(duì)變胞并聯(lián)機(jī)構(gòu)3(Ra)PS的構(gòu)型分析可知,為使機(jī)構(gòu)具有穩(wěn)定可控的能力,合理的驅(qū)動(dòng)選擇必不可少。因此機(jī)構(gòu)的驅(qū)動(dòng)選擇不僅要盡可能保持與底座的連接,還要考慮機(jī)構(gòu)的運(yùn)動(dòng)是完全可控的。如果機(jī)構(gòu)選擇合理的驅(qū)動(dòng)方案,在鎖定所有驅(qū)動(dòng)運(yùn)動(dòng)鉸鏈后,并聯(lián)機(jī)構(gòu)的約束螺旋系統(tǒng)的階數(shù)應(yīng)為6,運(yùn)動(dòng)動(dòng)平臺(tái)將失去所有6個(gè)自由度。
為實(shí)現(xiàn)機(jī)構(gòu)不同工作模式之間的靈活性和正常切換,保證機(jī)構(gòu)的優(yōu)良動(dòng)態(tài)性能,在與底座直接連接的每個(gè)支鏈中的外軸、內(nèi)軸、移動(dòng)副可以作為驅(qū)動(dòng)選擇。
由于(Ra)PS支鏈兩種構(gòu)態(tài)的約束不同,因此對(duì)應(yīng)的驅(qū)動(dòng)選擇也不完全相同。在(Ra-2)PS支鏈中,圍繞外軸線的旋轉(zhuǎn)或沿著移動(dòng)副的平移可以用作驅(qū)動(dòng)。根據(jù)圖2b和對(duì)應(yīng)的支鏈運(yùn)動(dòng)螺旋,分別鎖定這兩個(gè)輸入可以形成驅(qū)動(dòng)約束螺旋為
(7)

當(dāng)改變(Ra-2)PS支鏈到(Ra-1)PS時(shí),Ra鉸的內(nèi)軸轉(zhuǎn)動(dòng)副可以作為一個(gè)新的驅(qū)動(dòng)選擇。鎖定該驅(qū)動(dòng)產(chǎn)生的驅(qū)動(dòng)約束力為
(8)

通過(guò)上述分析可知,滿足驅(qū)動(dòng)方案的原則是,驅(qū)動(dòng)約束螺旋與動(dòng)平臺(tái)約束螺旋系統(tǒng)形成一個(gè)六階約束系統(tǒng)。在此基礎(chǔ)上,對(duì)3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的驅(qū)動(dòng)方案總結(jié)如下:①當(dāng)3(Ra)PS并聯(lián)機(jī)構(gòu)含有支鏈(Ra-2)PS時(shí),外軸轉(zhuǎn)動(dòng)副和移動(dòng)副可以作為驅(qū)動(dòng)選擇。②當(dāng)3(Ra)PS并聯(lián)機(jī)構(gòu)含有支鏈(Ra-1)PS時(shí),外軸轉(zhuǎn)動(dòng)副、移動(dòng)副和內(nèi)軸轉(zhuǎn)動(dòng)副中的任意兩個(gè)可以作為驅(qū)動(dòng)選擇。
將圖3b中的2(Ra-2)PS-1(Ra-1)PS并聯(lián)機(jī)構(gòu)作為示例。根據(jù)第2節(jié)分析可知在該構(gòu)型下機(jī)構(gòu)具有4個(gè)自由度,其中每個(gè)(Ra-1)PS支鏈有3個(gè)選擇,其中任意2個(gè)可以作為驅(qū)動(dòng),每個(gè)(Ra-2)PS支鏈有2個(gè)選擇,其中任意一個(gè)可以作為驅(qū)動(dòng)。現(xiàn)將(Ra-1)PS支鏈的移動(dòng)副和內(nèi)軸轉(zhuǎn)動(dòng)副和(Ra-2)PS支鏈的移動(dòng)副作為驅(qū)動(dòng)方案,2(Ra-2)PS-1(Ra-1)PS并聯(lián)機(jī)構(gòu)的驅(qū)動(dòng)約束螺旋系統(tǒng)為
(9)

對(duì)上述驅(qū)動(dòng)選擇方案展開(kāi)分析,拓展到變胞并聯(lián)機(jī)構(gòu)的所有構(gòu)型,對(duì)應(yīng)構(gòu)型的驅(qū)動(dòng)選擇數(shù)目如表1所示。

表1 所有構(gòu)型驅(qū)動(dòng)選擇數(shù)目Tab.1 Drive options for all configurations
4 運(yùn)動(dòng)學(xué)建模與位移分析
4.1 運(yùn)動(dòng)學(xué)建模
考慮到(Ra)PS支鏈的兩個(gè)構(gòu)態(tài)之間的差異,可以發(fā)現(xiàn),引起兩種構(gòu)態(tài)變化的關(guān)鍵原因是內(nèi)軸的旋轉(zhuǎn)導(dǎo)致內(nèi)外軸線共線,當(dāng)內(nèi)外軸線共線時(shí),Ra鉸等效為一個(gè)虎克鉸,當(dāng)內(nèi)外軸線不共線時(shí),Ra鉸等效為一個(gè)球鉸。
根據(jù)第3節(jié)中的驅(qū)動(dòng)分析方案,將(Ra-1)PS支鏈的內(nèi)軸的轉(zhuǎn)動(dòng)、外軸的轉(zhuǎn)動(dòng)和移動(dòng)副作為驅(qū)動(dòng)輸入。因此,(Ra-2)PS可視為(Ra-1)PS支鏈的一種特殊構(gòu)態(tài),通過(guò)在βi=0時(shí)鎖定內(nèi)軸驅(qū)動(dòng)。支鏈的這種特性為3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的統(tǒng)一幾何和運(yùn)動(dòng)學(xué)建模提供可能,它可以覆蓋3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的所有構(gòu)型。因此,在(Ra-2)PS支鏈中將移動(dòng)副作為驅(qū)動(dòng)選擇,在(Ra-1)PS支鏈中,將內(nèi)軸的旋轉(zhuǎn)和移動(dòng)副作為驅(qū)動(dòng)選擇。
在全局坐標(biāo)系下,3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的所有構(gòu)型的約束關(guān)系可以表示為
(10)
當(dāng)支鏈為(Ra-1)PS時(shí),β≠0;支鏈為(Ra-2)PS時(shí),β=0。其中,li是支鏈長(zhǎng)度,R(k,g)表示繞k軸旋轉(zhuǎn)一定角度g。
在此基礎(chǔ)上,將3(Ra)PS的幾何約束分為兩部分進(jìn)行描述。第一部分支鏈長(zhǎng)度的約束方程為
(11)
第二部分每個(gè)支鏈的移動(dòng)副的方向與Ra鉸的內(nèi)軸軸線方向始終垂直,即
(Ra′i+P-bi)Tsi=0 (i=1,2,3)
(12)
式中動(dòng)平臺(tái)坐標(biāo)系相對(duì)于全局坐標(biāo)系的旋轉(zhuǎn)矩陣為R,動(dòng)平臺(tái)原點(diǎn)在全局坐標(biāo)系中的位置矢量為P=(px,py,pz),球鉸中心Ai在動(dòng)平臺(tái)坐標(biāo)系下的位置矢量為a′i,Ra鉸內(nèi)軸軸線的單位方向向量為si。
4.2 逆運(yùn)動(dòng)學(xué)分析
根據(jù)給定動(dòng)平臺(tái)的原點(diǎn)位置P和姿態(tài)R獲得驅(qū)動(dòng)參數(shù)(支鏈長(zhǎng)度li、內(nèi)軸旋轉(zhuǎn)角βi)來(lái)分析3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的逆運(yùn)動(dòng)學(xué)。如圖4所示,將動(dòng)平臺(tái)坐標(biāo)系Puvw的原點(diǎn)建立在動(dòng)平臺(tái)原點(diǎn)上,其中v穿過(guò)A3并垂直于A1A2,w軸垂直于動(dòng)平臺(tái),u軸的建立符合右手準(zhǔn)則。
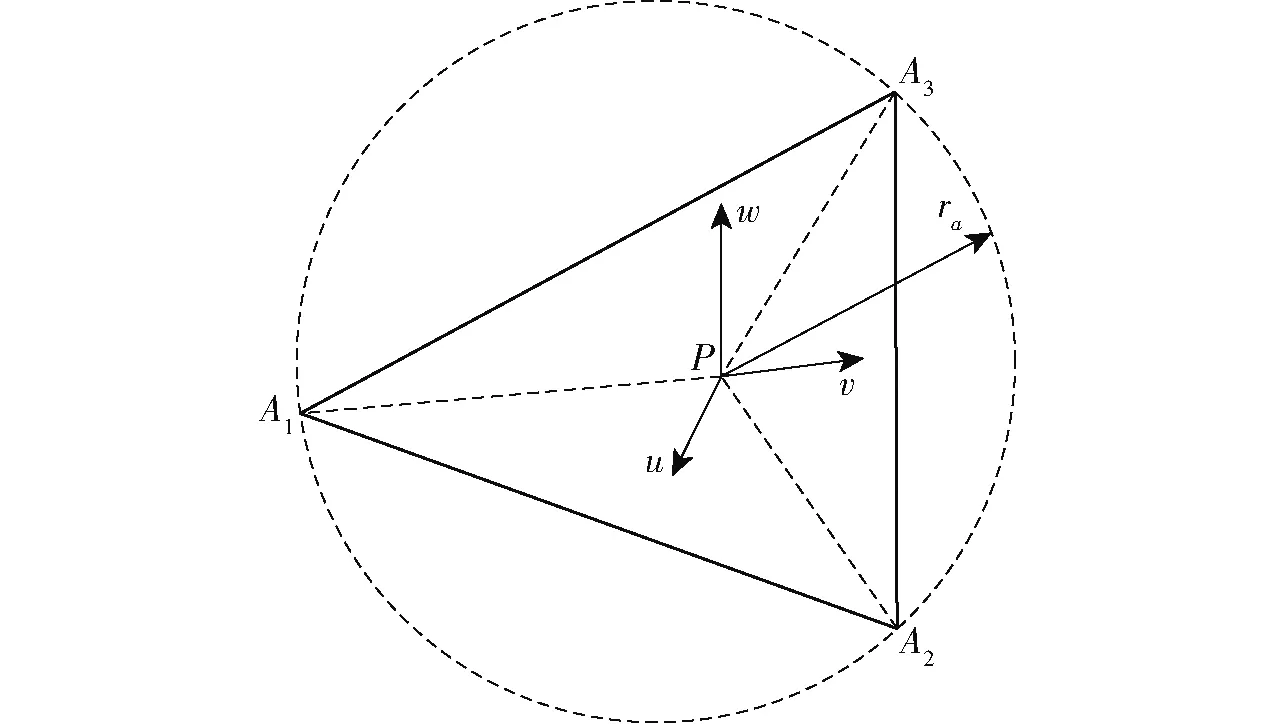
圖4 動(dòng)平臺(tái)的局部坐標(biāo)系Fig.4 Local coordinate system of moving platform
當(dāng)給出在全局坐標(biāo)系下動(dòng)平臺(tái)的位置P和姿態(tài)矩陣R后,球形鉸鏈的中心Ai的位置可以表示為
(13)
其中
式中ra——?jiǎng)悠脚_(tái)外接圓半徑
在4種自由度的構(gòu)型中,包含(Ra-2)PS支鏈的構(gòu)型在求反解時(shí)平臺(tái)的位置和姿態(tài)參數(shù)不能隨意給定。它們應(yīng)遵循方程(12)中的幾何約束關(guān)系,基本規(guī)則是:當(dāng)支鏈i處于(Ra-2)PS構(gòu)型時(shí),球鉸原點(diǎn)Ai被約束在平面Σ0內(nèi),因此Ai的位置矢量應(yīng)與平面Σ0的法向量垂直,可得關(guān)系式
aini=0 (i=1,2,3)
(14)
其中
將式(13)代入式(14)可以獲得關(guān)系式為
(15)
將式(13)代入式(11),可以對(duì)3(Ra)PS機(jī)構(gòu)的逆運(yùn)動(dòng)學(xué)進(jìn)行求解,即
(16)
由第2節(jié)分析可知,當(dāng)支鏈為(Ra-2)PS時(shí),β1=β2=β3=0。然而當(dāng)支鏈為(Ra-1)PS時(shí)有
(17)
4.3 正運(yùn)動(dòng)學(xué)分析
與逆運(yùn)動(dòng)學(xué)分析相反,正運(yùn)動(dòng)學(xué)分析是在給出每個(gè)構(gòu)型對(duì)應(yīng)的驅(qū)動(dòng)參數(shù)(li,βi)的前提下,求解平臺(tái)位置P和姿態(tài)矩陣R。3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的正運(yùn)動(dòng)學(xué)分析方法是利用支鏈參數(shù)表示球鉸中心矢量ai,建立基于平臺(tái)幾何參數(shù)的約束方程。根據(jù)圖4,動(dòng)平臺(tái)幾何約束可以描述為
(18)

(19)
其中fi(·)是關(guān)于ti的線性函數(shù),方程系數(shù)僅取決于已知的結(jié)構(gòu)參數(shù)。對(duì)方程組(19)中的前2個(gè)方程,使用Sylvester結(jié)式消元法消去t1,可以得到一個(gè)只含有t2、t3的新方程
(20)
對(duì)式(19)中的f3和式(20)中的f4使用相同的方法,可以獲得一個(gè)只含有未知變量t3的多項(xiàng)式為
(21)
其中系數(shù)hi是一個(gè)只與輸入?yún)?shù)有關(guān)的常數(shù)。表明方程(21)是一個(gè)只包含變量t3的16階的單變量方程。對(duì)式(21)進(jìn)行求解就可得到16個(gè)t3的解。通過(guò)將t3的每一個(gè)解代入方程(19)中的第3個(gè)方程并選擇滿足的根來(lái)求解t2。t1可以通過(guò)將t2和t3的每一對(duì)解代入方程(19)中的第1個(gè)方程求得,并代入式(19)中的第2個(gè)方程來(lái)驗(yàn)證是否正確。在此基礎(chǔ)上,將t1、t2、t3的16對(duì)解代入幾何約束方程αi=2arctanti中,可以得到每個(gè)支鏈與底座平面的夾角。并通過(guò)方程(20)計(jì)算出球鉸中心Ai的坐標(biāo)。
如圖4所示,動(dòng)平臺(tái)的位置和位姿可以使用3個(gè)球鉸的中心坐標(biāo)確定,即
(22)
將正解得到的3個(gè)Ai的坐標(biāo)代入式(22)獲得動(dòng)平臺(tái)坐標(biāo)系中坐標(biāo)軸的向量,獲得動(dòng)平臺(tái)的位置坐標(biāo)和姿態(tài)矩陣。
5 運(yùn)動(dòng)學(xué)分析的數(shù)值算例
圖3所示的3(Ra)PS變胞并聯(lián)機(jī)構(gòu)動(dòng)平臺(tái)和底座的外接圓半徑分別為:ra=10 cm,rb=20 cm。
通過(guò)數(shù)字實(shí)例驗(yàn)證逆運(yùn)動(dòng)學(xué)的準(zhǔn)確性,根據(jù)第4節(jié)的運(yùn)動(dòng)學(xué)分析,3(Ra)PS變胞并聯(lián)機(jī)構(gòu)的4種構(gòu)型的逆運(yùn)動(dòng)學(xué)實(shí)例如表1所示。通過(guò)給出平臺(tái)的姿態(tài)和位置參數(shù),并通過(guò)式(16)、(17)得到的逆運(yùn)動(dòng)學(xué)結(jié)果如表2所示。

表2 運(yùn)動(dòng)學(xué)反解結(jié)果Tab.2 Results of inverse kinematics
由于不同的構(gòu)型位置和姿態(tài)參數(shù)的關(guān)系也不相同。求反解時(shí)各構(gòu)型對(duì)應(yīng)的輸入旋轉(zhuǎn)矩陣和動(dòng)平臺(tái)位置坐標(biāo)為

在構(gòu)型3(Ra-2)PS下,繞x、y、z軸轉(zhuǎn)動(dòng)π/8的旋轉(zhuǎn)矩陣為R1,并且動(dòng)平臺(tái)原點(diǎn)的位置坐標(biāo)為P1,根據(jù)式(15)的3個(gè)約束方程求出位姿參數(shù)。
在構(gòu)型2(Ra-2)PS-1(Ra-1)PS下,繞x、y、z軸轉(zhuǎn)動(dòng)π/8的旋轉(zhuǎn)矩陣為R2,動(dòng)平臺(tái)原點(diǎn)的位置坐標(biāo)為P2,根據(jù)式(15)的后兩個(gè)約束方程可求出位姿參數(shù)。
當(dāng)構(gòu)型自由度大于等于4時(shí),并聯(lián)機(jī)構(gòu)的構(gòu)型都具有繞x、y、z軸的3個(gè)轉(zhuǎn)動(dòng),因此選用的輸入旋轉(zhuǎn)矩陣R3、R4與R2相同。
動(dòng)平臺(tái)原點(diǎn)位置參數(shù)P3可根據(jù)R3和式(15)的第3個(gè)方程獲得。
由于構(gòu)型3(Ra-2)PS自由度為6,動(dòng)平臺(tái)沒(méi)有約束,因此P4只需在給定姿態(tài)動(dòng)R4后任意選取即可。
為驗(yàn)證統(tǒng)一運(yùn)動(dòng)學(xué)正解的分析方法,變胞并聯(lián)機(jī)構(gòu)3(Ra)PS的每一個(gè)構(gòu)型都有16個(gè)解,表3~6分別列出每個(gè)構(gòu)型的數(shù)值正解作為示例。

表3 3(Ra-2)PS正解實(shí)例Tab.3 Forward results of 3(Ra-2)PS rad

表4 2(Ra-2)PS-1(Ra-1)PS正解實(shí)例Tab.4 Forward results of 2(Ra-2)PS-1(Ra-1)PS rad

表5 2(Ra-1)PS-1(Ra-2)PS正解實(shí)例Tab.5 Forward results of 2(Ra-1)PS-1(Ra-2)PS rad

表6 3(Ra-1)PS正解實(shí)例Tab.6 Forward results of 3(Ra-1)PS rad
6 結(jié)論
(1)闡述一種新型變胞鉸鏈Ra鉸,該鉸鏈可以實(shí)現(xiàn)球鉸與虎克鉸兩種構(gòu)態(tài)的切換。通過(guò)改變(Ra)PS支鏈的構(gòu)型演示變胞并聯(lián)機(jī)構(gòu)3(Ra)PS的構(gòu)型變化,說(shuō)明該機(jī)構(gòu)具有4種構(gòu)型,在2R1T、3R1T、3R2T和6自由度之間具有可重構(gòu)的能力。
(2)根據(jù)驅(qū)動(dòng)約束分析表明,對(duì)于不同的構(gòu)型結(jié)構(gòu)給出合理的驅(qū)動(dòng)方案。選擇繞內(nèi)軸的旋轉(zhuǎn)作為驅(qū)動(dòng),將一個(gè)構(gòu)態(tài)作為另一個(gè)構(gòu)態(tài)的特例,為(Ra)PS支鏈的運(yùn)動(dòng)學(xué)建模提供可能,在此基礎(chǔ)上,建立3(Ra)PS變胞型并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)模型,對(duì)并聯(lián)機(jī)構(gòu)進(jìn)行正逆運(yùn)動(dòng)學(xué)分析。
(3)通過(guò)數(shù)值實(shí)例證明機(jī)構(gòu)構(gòu)型分析與實(shí)際解相符,證明了理論結(jié)果的正確性。
