電動助力轉向系統主動回正控制策略研究
2022-03-12 11:32:56武國飛李媛媛陳少棠
制造業自動化 2022年2期
武國飛,李媛媛,陳少棠
(上海工程技術大學 電子電氣工程學院,上海 201620)
0 引言
電動助力轉向(Electric Power Steering,縮寫EPS)系統具有許多優勢,例如經濟節能性、安全舒適性、操縱感、便于封裝的模塊化、尺寸小和環保等[1,2]。EPS系統中回正控制的目的是確保轉向盤扭矩及時、準確的均勻平滑過渡,提高駕駛員舒適感,因此,回正控制是EPS系統的主要功能[3]。然而,回正控制系統易受轉向時摩擦力的影響,同時降低了返回中心的性能[4]。尤其在車輛的行駛過程中,駕駛員經常需要大幅度地校正方向,使得轉向回正力矩發生顯著變化,車輛駕駛員容易疲勞,影響交通安全。
對于安裝了轉向盤角度傳感器的EPS系統,可以實時獲得轉向盤的絕對位置,因此對這種系統的研究主要集中在回正控制的實現方法上。近年來,海內外有許多研究學者對此進行了廣泛且深入的研究。Li S等人[5]提出了未配備角度傳感器的電子助力轉向的返回控制。侯訓波等人[6]通過對轉向盤轉角位置與回正電流(等效回正力矩)和轉向盤轉角速度與阻尼電流(等效阻尼力矩)進行設計匹配,并對回正轉角速度進行實時跟蹤控制,使EPS系統在一定程度上提高系統的回正性能,但未考慮到車輛行駛時的自動調心扭矩對系統的影響。Kim等人[7]在EPS的控制邏輯上提出了PID控制器來改善EPS車輛的返回中心性能,但是無法確保系統穩定性和精度。Yun Z等人[8,9]提出改進的PID控制算法控制轉向盤返回到中心,但是無法使系統達到一個良好的動態性能,因此有必要找到一個PID控制器參數整定的方法以提高系統性能。Cho等人[10]提出了一種模糊PID控制器,以確保在估計的轉向角的基礎上進行返回控制。然而,通過電動機角速度的積分,在轉向盤角度估計中也存在相當大的過程噪聲。王若平等人[11]將神經網絡控制方法應用于EHPS系統,目的是提供更高的轉向輔助準確度并改善道路感覺。Geng Cong等人[12]提出BP神經網絡PID算法轉矩分配控制策略,其中考慮了電動機轉矩特性和路面附著性的約束條件。但是BP神經網絡在實際應用中收斂緩慢,易于陷入局部收斂,其中網絡權重和閾值深深地影響著訓練效果。
本文針對以上問題,主要進行EPS系統主動回正控制策略研究,建立了EPS系統和主動回正控制系統動力學模型,設計了主動回正狀態決策判斷轉向時是否回正控制或是轉向助力控制。針對BP神經網絡收斂緩慢以及容易陷入局部收斂問題,本文提出了基于PSO優化BP神經網絡PID參數自適應調整控制算法,利用PSO優化算法的全局最優和收斂速度快的特點優化BP網絡的權值和閾值,以避免回正控制系統陷入局部最優,有效實現PID參數的自適應調整。
1 EPS系統的構成及工作原理
EPS系統主要分成電子部分和機械傳動兩部分。電子部分主要包括電子控制單元(ECU)、轉矩和轉角傳感器以及電動機;傳動部分包括轉向基本助力和回正助力兩種工況、減速機構,以及傳統轉向系統中的齒輪齒條等[13],如圖1所示。其基本工作原理:轉向盤旋轉時,ECU接收輸入力矩和電機電流信號,以確定電動機提供的輔助扭矩的量[14,15]。當轉向盤不被轉動時,ECU停止發送信號指令,電動機控制器接收不到ECU的指令信號,因此電動機不工作[16]。

圖1 EPS簡化系統圖
2 電動助力系統動力學模型
2.1 轉向系統的動力學模型
EPS系統的動態模型由轉向機構,電動機動態特性和道路與輪胎接觸力之間的關系決定。如圖1所示EPS系統簡化模型中,根據牛頓運動學公式和動量力矩定理,可建立如下數學模型:
轉向盤、轉向軸數學模型為:

助力電機與下轉軸的動力學模型:

齒輪齒條的數學模型:

由式(1)~式(3)可得EPS等效動力學模型為:

電動機的電力學方程式為:

通過大量的測試數據分析,輪胎對轉向系統的作用力矩,可以用自對準焦扭矩Tsat來表示,于是Tsat等效數學模型可以表示為:
2.2 回正控制系統的動力學模型
EPS系統工作時,ECU會接收到轉向盤扭矩Td(t)和轉向輪角度θd等信息。在回正控制器中,采用PSO優化BP神經網絡PID參數自適應調整算法,如圖2所示。

圖2 EPS主動回正控制結構圖
其中,回正控制系統動力學模型為:
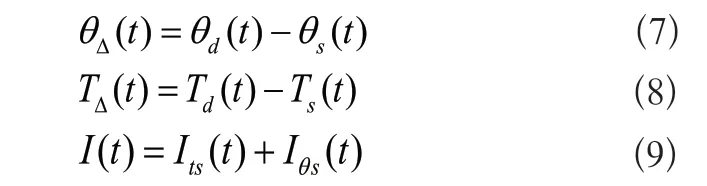
作用在轉向盤上的扭矩可以通過式(9)獲得:

其中,Tr(t)是阻力矩,Ta(t)是電動機提供的輔助扭矩,θd轉向輪角度,Iθs回正補償電流,Its基本助力電流。EPS系統各參數如表1所示。
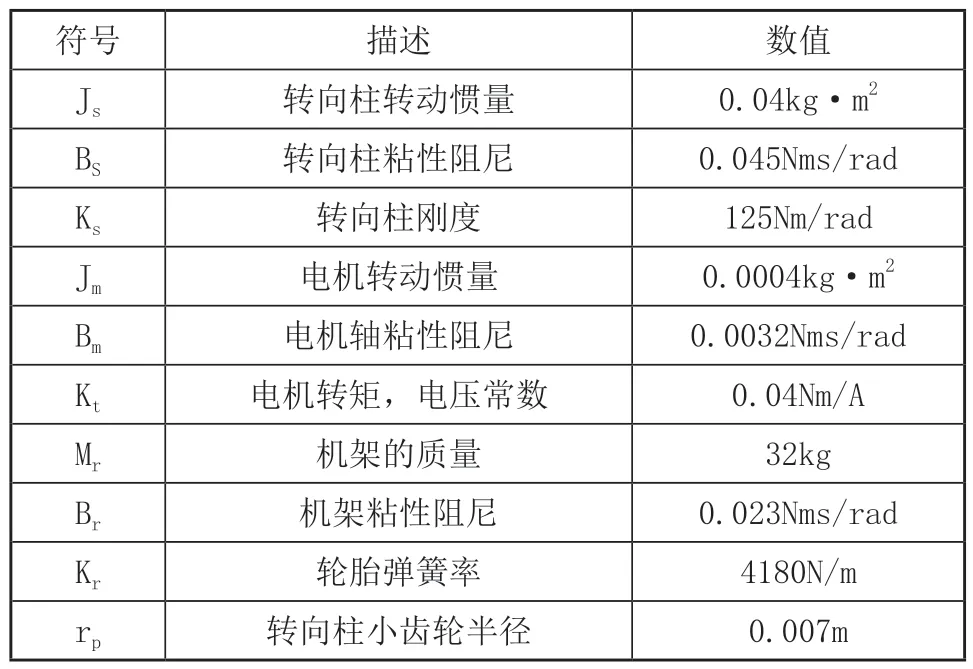
表1 EPS系統參數
(續)
2.3 EPS系統主動回正控制決策
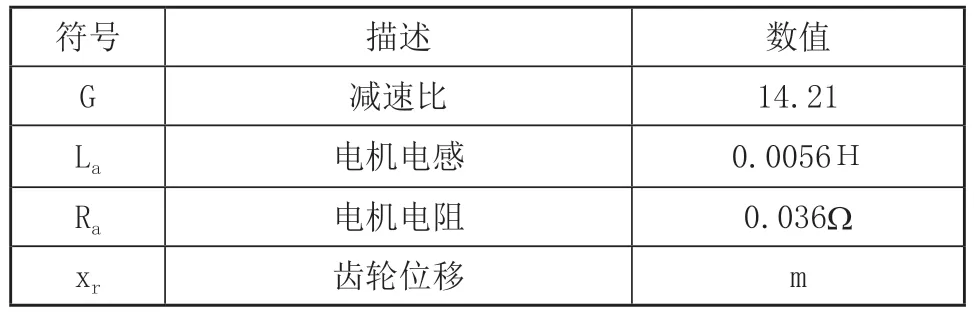
有源回正控制的前提是準確地判斷轉向系統的當前運行狀態,應該滿足以下特點:
1)確保轉向盤轉角|θ|大于設定值Δ。
2)當車輛低速行駛或處于靜止狀態時,沒有必要也不適合使用有源回正控制。當高速行駛時,由于轉向阻力小,也不需要有源回正控制。因此,主動回正控制應該在設定的車速范圍內,最小車速Vmin通常設定為0km/h,車速最大設定值為Vmax。
3)研究中,判斷汽車轉向時轉向盤是不是處于主動回正狀態,最常用的方法是利用角度θ和角速度θ的乘積是否為負數來確定回正狀態。
4)由于駕駛員的干預,轉向盤將保持靜止或以常規動力轉向運行,并且輔助狀態和回正狀態將頻繁切換。由于轉向盤的角速度不能突然改變,會產生干擾開關,因此,還需要使用轉向扭矩信號來檢測駕駛員是否具有從回正狀態變為轉向狀態的意圖。在動力轉向控制狀態下,當轉向扭矩超過設定扭矩值Td0時,輔助電機將提供輔助扭矩,也就是說,如果轉向扭矩超過設定扭矩值Td0,則意味著駕駛員有意圖轉動轉向盤,則切換到動力轉向助力狀態。因此,EPS系統主動回正狀態決策流程設計如圖3所示。
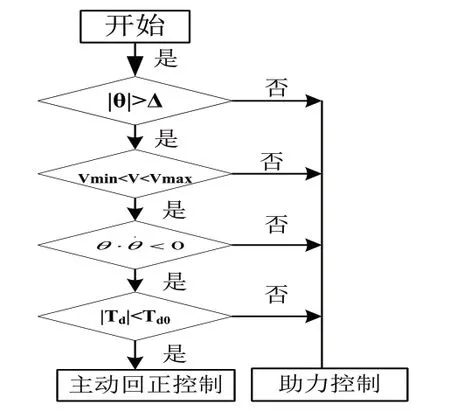
圖3 狀態決策流程圖
3 基于PSO優化BP神經網絡PID參數自適應調整的EPS回正控制器設計
3.1 粒子群優化算法
在大片土地上尋找食物時,最有用的鳥群聚集方法是在鳥類附近尋找最接近食物的區域。受鳥類尋找食物的方式啟發,Kennedy于1995年提出了PSO算法的理論,旨在解決函數極值優化的問題[17]。
PSO算法理論的簡要描述:在n維空間中有一組隨機的“粒子”,類似鳥群聚集中的“鳥”一樣,每只鳥在很大概率上是該問題的潛在解。且因其在空間上具有自己的坐標(位置和速度),第i個粒子在n維空間中的位置可以表示為Xi=(Vi1,Xi2,...,Xin),速度為Vi=(Vi1,Vi2,...,Vin)。粒子的特征在于這三個參數的位置,速度和適合度值。粒子的單個極值寫為Pi=(Pi1,Pi2,...,Pin)T并且全局極值也類似地為Pg=(Pg1,Pg2,...,Pgn)。在每次迭代中,每個粒子的速度都會根據這兩個極限值(Pi和Pg)動態調整以更新其位置,也就是說,不斷地靠近最佳解直到找到它[18]。
在每次迭代中,第i個粒子的速度和位置表示為:

其中,ωi是慣性權重;c1和c2是加速度因子;r1和r2是[0,1]中的隨機數;t是當前迭代;Xin是粒子位置;Vin是粒子速度。
3.2 BP神經網絡PID參數自適應調節設計
增量式PID控制器,支持kp、ki、kd參數在線調整;BP神經網絡(Back Propagation Neural Network,縮稱BPNN),會根據其運行狀態,通過BPNN的自學習和加權來調節PID的kp、ki、kd,從而實現系統的最佳性能[14]。
其中,增量式PID控制算法描述如下:
其中,kp、ki、kd分別表示比例、積分、微分;e(k)、e(k-1)、e(k-2)代表第k、k-1、k-2次的偏差信號。
在BPNN中,根據被控系統的復雜程度來選取輸入變量的數目。將誤差和誤差變化率作為BPNN的輸入,本文中選取4個輸入變量,輸出節點對應3個PID的可調參數。因此,通過以上分析,可構造一個4-8-3的三層網絡如圖4所示,網絡輸入、輸出如方程(15)~(17)所示。
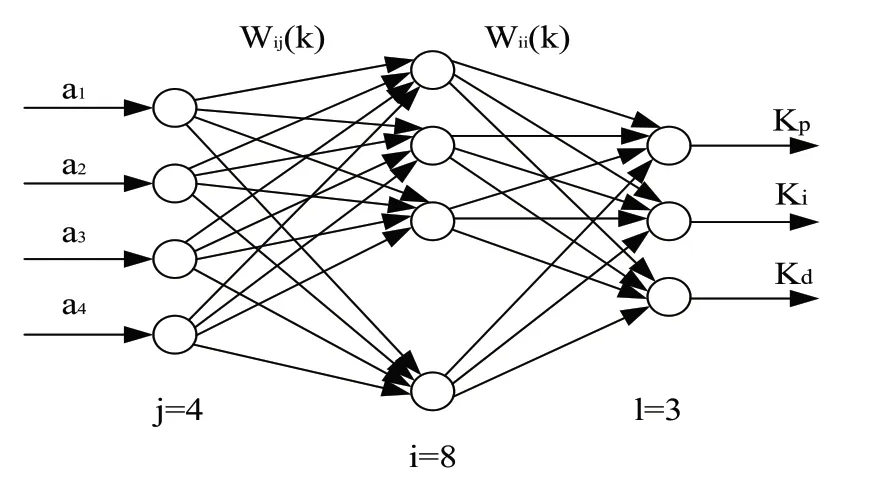
圖4 三層BP神經網絡結構圖
其中,網絡的輸入層的輸入、輸出為:

網絡的輸入變量作為控制器的輸入:

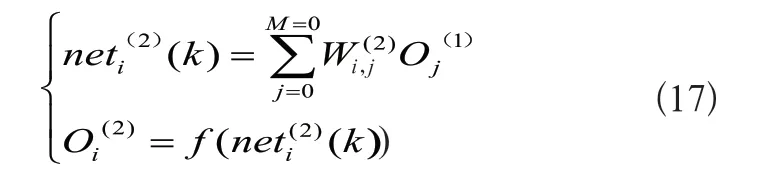
網絡隱含層的輸入、輸出為:
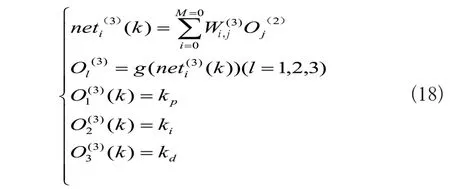
網絡輸出層的輸入輸出為:
選取性能指標函數為:

3.3 PSO優化BP神經網絡的初始權值
神經網絡的初始權重嚴重影響其穩定性和函數擬合程度。使用傳統的梯度下降法來訓練網絡權重很容易落入局部極值,并導致過訓練和過擬合等問題。而PSO可以克服這一缺點,加快權值的收斂速度。利用PSO優化的權值和閾值作為BPNN初始權值和閾值,并進行訓練和預測。
PSO優化 BPNNPID的具體實施步驟如下:
1)粒子群初始化:定義kp、ki、kd參數的搜索空間,并在該空間中生成初始群X。
2)將每組粒子Xi=(Xi1,Xi2)T輸入控制系統并運行,可用BP神經網絡誤差函數作為適應度函數:

3)如果Hk<Hk-1,則Pi更新為Xi;如果Hk=min[H],則Pg更新為Xi;
4)根據式(11)和式(12)更新每個粒子的速度和位置;
5)計算 BPNN的輸入和輸出,輸出層即為PID的kp、ki、kd參數;
6)根據式(14)計算PID控制器的輸出u(k);
7)如果達到迭代次數的極限或滿足系統性能要求,則記錄kp、kd參數的最終結果,否則,返回步驟2)重新執行,直到滿足系統性能為止。
本文的目的是用PSO算法對BPNN進行優化,BPNN會根據其運行狀態,通過BPNN的自學習和加權來調節PID的kp、ki、kd,從而實現PID參數的自適應調整。
4 仿真結果分析
4.1 仿真原理圖設計
為了驗證所提控制方法的可行性,在Simulink中搭建EPS工作模式、回正控制模式下電機電流模型、助力模式電機電流、電機模型、EPS動態模型及車輪等效數學模型和回正力矩計算模型,主動回正狀態決策來判斷轉向盤是不是處于回正觸發狀態或基本助力狀態的仿真原理圖如圖5所示。
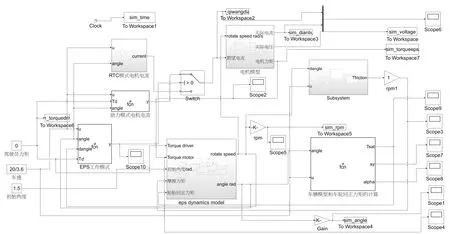
圖5 EPS系統主動回正系統仿真原理圖
4.2 仿真結果分析
本文選取轉向盤角度theta在0°到180°范圍內,BPNN和PSO優化BP神經網絡對PID的kp、ki、kd參數整定結果如圖6~圖8所示。

圖6 神經網絡訓練Kp參數圖
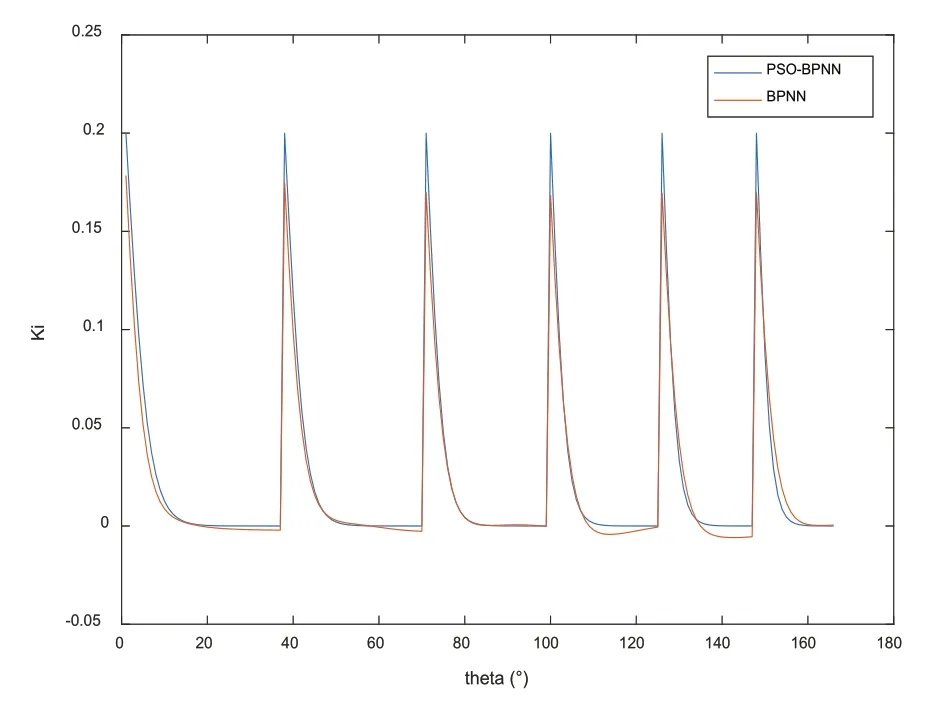
圖7 神經網絡訓練Ki參數圖
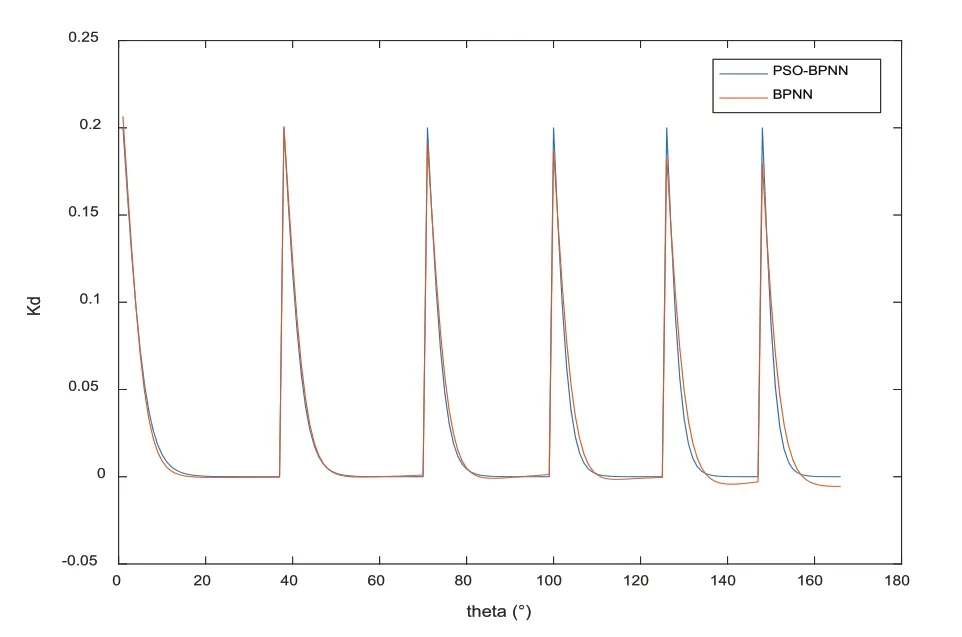
圖8 神經網絡訓練Kd參數圖
為了驗證該所提控制算法的準確性,研究中選取了車速分別為40km/h和80km/h工況。車速為40km/h下轉向盤回正性能仿真如圖9所示,從圖9可以看出,提出的基于PSO優化BPNNPID參數自適應調整算法要比無控制、單獨PID、普通BPNNPID控制及模糊PID的控制性能要好,收斂速度更快,穩定時間更小;無控制時回正不足,轉向盤殘余達到24°;PID控制時轉向盤殘余達12°;模糊PID控制時轉向盤殘余4.5°;BPNNPID參數自適應調整控制時轉向盤殘余3°。
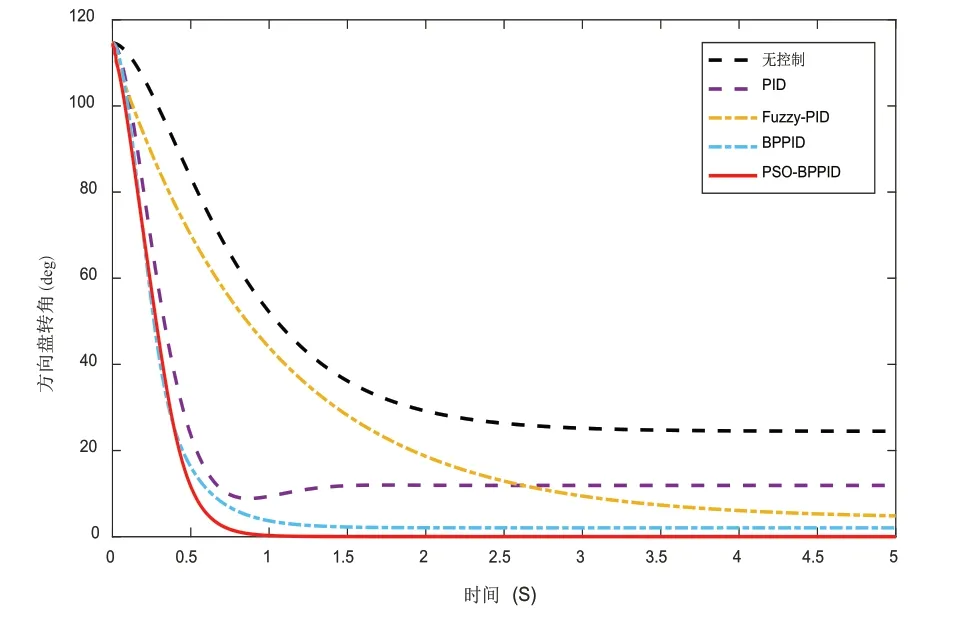
圖9 車速為40km/h回歸性能仿真
車速為80km/h回正轉角性能仿真如圖10所示,無控制和PID控制的車輛回正時分別超調5°和3°;BPNNPID控制和模糊PID控制下較平穩,但回正時轉向盤轉角殘余仍分別為3°和4.5°;本文提出的基于PSO優化BPNNPID參數自適應調整控制算法能使車輛平穩的回正且快速的收斂至0。
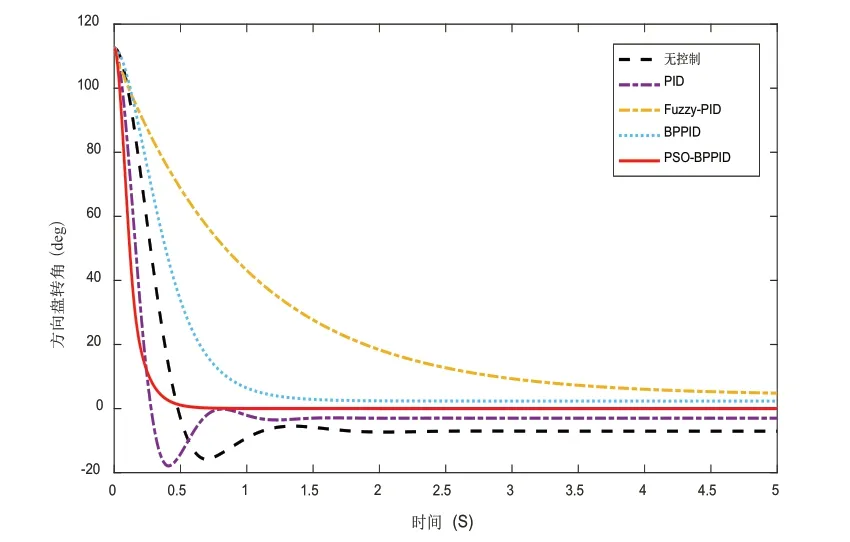
圖10 車速為80km/h回歸性能仿真
從上述曲線圖的對比分析中發現,具有回正控制的EPS系統的提升性能與沒有回正控制的EPS性能總體趨勢大致相同。結果表明,引入回正控制不會影響車輛轉向盤的轉向特性。汽車轉向盤在沒有主動回正控制時,轉向盤回正轉角在低速時回正不足,高速時回正超調。經過粒子群優化BP NN算法優化后的PID控制器比無控制、單獨PID、BPNNPID控制及模糊PID的控制器擁有更好的性能,收斂速度最快、穩定時間最小、無回正不足和回正超調現象,提高了系統的精度和響應速度,從而能夠對EPS回正控制系統精確控制。
4.3 硬件在環試驗
為了進一步驗證所提出的主動RTC控制方法的準確性,需要結合實車測試驗證所提出方法的可行性,如圖11所示,該測試平臺由上位機、實時目標計算機、多功能數據采集卡、實車轉向系統、硬件接口電路組成。其中EPS控制器構成如圖12所示。

圖11 EPS硬件在環平臺

圖12 EPS控制器
轉動轉向盤為一定角度,維持一定時間后突然松手,通過上位機軟件設定好參數,實驗時觀測并記錄轉向盤回正轉角殘留數據。實車測試結果如圖13和圖14所示,選擇不同車速下的主動回正性能測驗,提出的基于PSO優化BPNNPID參數自適應調整算法與其他PID控制算法相比,能使車輛平穩的回正且快速的收斂至0,提高了EPS的魯棒性。
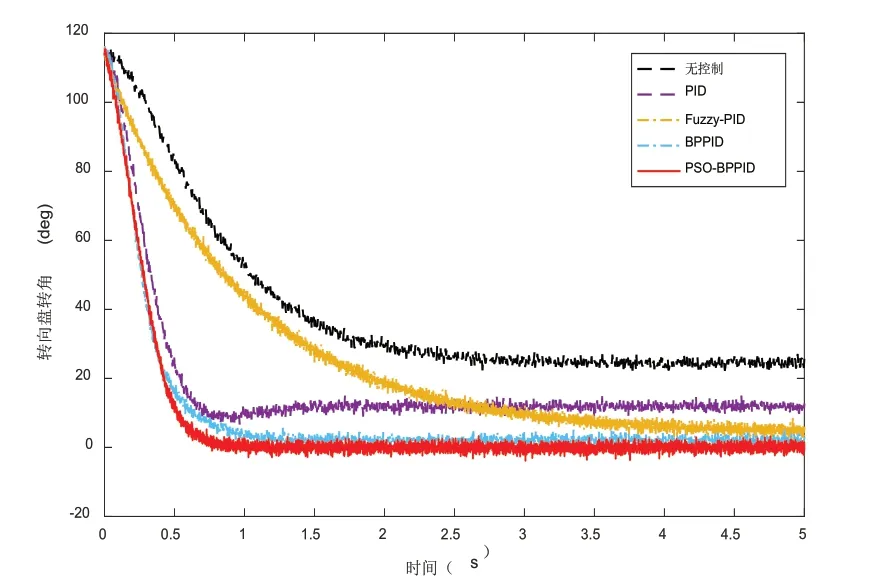
圖13 車速為40km/h回正性能硬件在環仿真
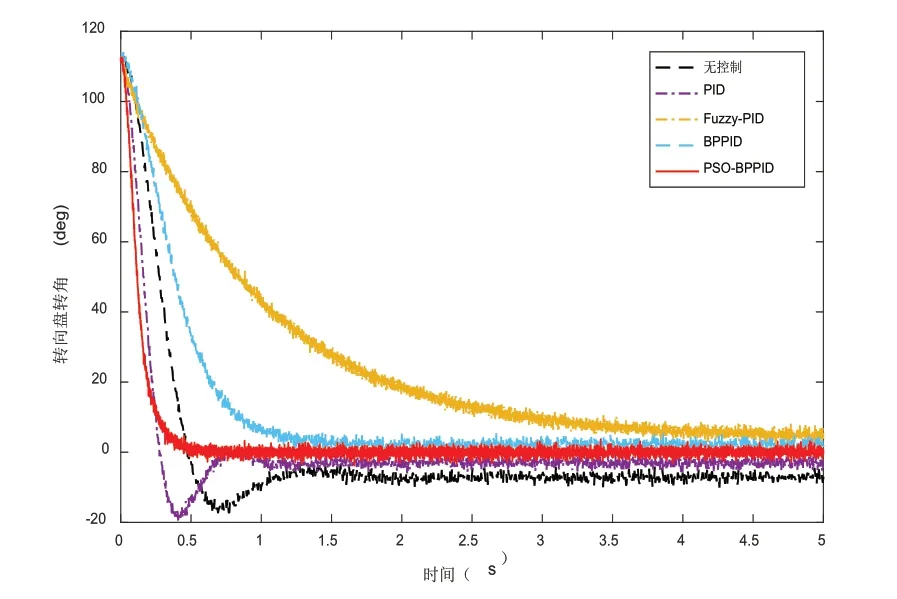
圖14 車速為80km/h回正性能硬件在環仿真
5 結語
1)設計主動回正狀態決策,通過角度信號、轉矩信號及車速信號判斷汽車轉向是否處于主動回正控制狀態。
2)本文提出一種PSO優化BP神經網絡PID參數自適應調整的控制算法,利用粒子群算法的全局最優和收斂速度快的特點克服BP神經網絡訓練網絡權值容易陷入局部極值缺陷,同時能夠對PID參數進行在線整定。
3)經過粒子群優化BP神經網絡算法優化后的PID控制器比無控制、單獨PID、BP神經網絡PID控制及模糊PID的控制器擁有更好的性能,收斂速度最快、穩定時間最小、無回正不足和回正超調現象,提高了系統的精度和響應速度,從而能夠對EPS回正控制系統精確控制。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
