無人機(jī)自主智能控制系統(tǒng)設(shè)計研究
2022-03-11 06:47:50鄭先茂班衛(wèi)華孔慶鋒李宇程
自動化技術(shù)與應(yīng)用
2022年2期
鄭先茂,班衛(wèi)華,孔慶鋒,李宇程
(廣西電網(wǎng)公司百色供電局,廣西 百色533000)
1 引言
無人機(jī)(UAV)即不需要駕駛?cè)藛T操縱,便可自主或者遠(yuǎn)程控制實現(xiàn)飛行的機(jī)器人系統(tǒng)。于1917年英國首次成功研發(fā)了世界上的第一架無人機(jī),且應(yīng)用到了第一次世界大戰(zhàn)中。由此,無人機(jī)經(jīng)常長遠(yuǎn)的發(fā)展進(jìn)程,在局部戰(zhàn)爭中充分發(fā)揮了關(guān)鍵性作用。早期,無人機(jī)在軍事領(lǐng)域的應(yīng)用比較頻繁,隨著不斷發(fā)展逐步推廣到了農(nóng)林業(yè)、電力行業(yè)、物流行業(yè)、地質(zhì)勘探、環(huán)境監(jiān)測等各個民用領(lǐng)域。而無人機(jī)自主化是當(dāng)前無人機(jī)的主要發(fā)展趨勢,必然會在一定程度上促進(jìn)無人機(jī)的廣泛深層應(yīng)用發(fā)展[1]。本文針對無人機(jī)設(shè)計了自主智能控制系統(tǒng)。
2 無人機(jī)自主智能控制等級劃分分析
無人機(jī)自主控制系統(tǒng)過于繁雜,將全部數(shù)據(jù)信息與控制指令放置于中央處理器進(jìn)行控制,勢必會導(dǎo)致控制系統(tǒng)紊亂,結(jié)構(gòu)失衡,數(shù)據(jù)信息錯亂,不僅會阻礙無人機(jī)維護(hù)與管理工作開展,還會大大降低無人機(jī)CPU計算與處理速度。所以就無人機(jī)自主控制系統(tǒng)的控制流程與特性,進(jìn)行控制等級劃分[2],具體如圖1所示。
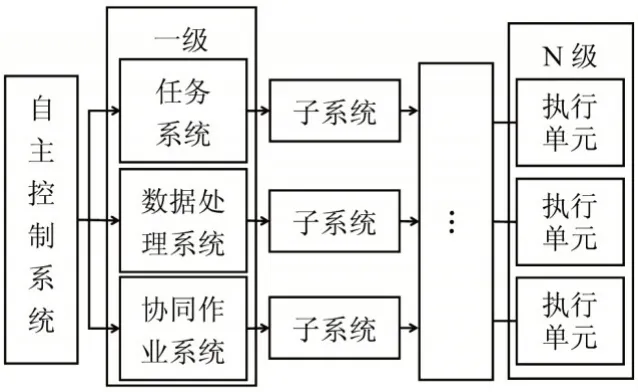
圖1 控制等級
由圖可知,無人機(jī)自主控制系統(tǒng)由任務(wù)系統(tǒng)、數(shù)據(jù)處理系統(tǒng)、協(xié)同作業(yè)系統(tǒng)共同構(gòu)成,各系統(tǒng)分別由相應(yīng)子系統(tǒng)組成,通過若干層級逐步劃分,最終基于無人機(jī)系統(tǒng)底層執(zhí)行單元負(fù)責(zé)系統(tǒng)指令執(zhí)行的相關(guān)任務(wù)。
3 無人機(jī)自主智能控制系統(tǒng)整體設(shè)計
無人機(jī)各傳感器通過獲取外界環(huán)境相關(guān)信息,并傳輸于CPU加以處理、計算分析,從而得出結(jié)論,在此基礎(chǔ)上,將控制信息傳輸于各執(zhí)行部件,以實現(xiàn)自主智能控制。……
登錄APP查看全文
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39