一種滿足電動輪椅車電磁兼容測試的測速工裝
2022-03-09 01:49:42葉瑀劉浩明張開帆陳欣超
科技與創新 2022年4期
葉瑀,劉浩明,張開帆,陳欣超
(廣東省醫療器械質量監督檢驗所,廣東 廣州 510663)
1 研究背景
隨著人口老齡化和各種慢性疾病的增加,以及逐年新增的重度運動功能疾病患者,作為老年人、殘疾人輔助出行工具電動輪椅車的需求越來越大[1]。根據《醫療器械分類目錄》,電動輪椅車屬于二類醫療器械。電動輪椅車常用的標準有:GB 9706.1—2007、GB/T12996—2012、GB/T 18029 輪椅車系列標準、YY 0505—2012[2]。其中,電動輪椅車的電磁兼容應滿足YY 0505—2012 和GB/T 18029.21—2012 的要求。GB/T 18029.21—2012 適用于最大速度不超過15 km/h殘疾人用室內和室外型電動輪椅車和電動代步車,且不適用與能承載1人以上的交通工具[3]。GB/T 18029.21—2012 規定電動輪椅車的行駛模式在抗擾度試驗時要對其速度和方向的穩定性進行監測,需要使用兩個轉速計分別對輪椅車的左右輪進行轉速監測,在通過公式計算平均輪速變化和轉向穩定性[4]。
常用的轉速監測是采用反射式測速傳感器,將反光材料粘貼于被測軸的測量部位上構成反射面,但這種監測方法人為誤差較大,監測數據無法溯源,反映平均輪速變化和轉向穩定性的參數需要手動計算,而且轉速監測裝置在抗擾度試驗時容易受到干擾導致不能正常監測轉速。
因此,針對這些問題,本文設計了一款由APP、電源模塊和監測模塊組成的滿足電動輪椅車電磁兼容測試的測速工裝,APP 通過藍牙功能將監測模塊與移動終端連接,監測模塊包括通信模塊、測速模塊、信號處理模塊和數據儲存模塊。
2 工裝設計原理
目前,常見的電動輪椅測速傳感器包括電磁式轉速傳感器或霍爾傳感器。由于電磁兼容測試的特殊性,電磁式轉速傳感器和霍爾傳感器會在試驗過程中受到電磁干擾而無法正常測速。本文利用紅外光反射原理,將一個黑白相間的四等分的光碼盤放置于輪椅車左右輪的轉軸處,兩個紅外線感應光電傳感器均可放置在輪椅車輪的外側。當紅外光照射轉盤時,白色部分將反射紅外線,黑色部分不反射紅外線,從而得到一個脈沖值,工作原理如圖1 所示。因此,只需要紅外光能照射到轉盤上,即可根據公式(1)得到轉動的角速度。

圖1 工作原理

式(1)中:ω為角速度;n為在測速時間內得到的脈沖數;T為測速時間。
本測速工裝對放置位置無特殊要求,只需將發射模塊和接收模塊對準測速終端任意一點,接收模塊接收到測速終端反射的光信號,經由光電轉換模塊轉換成脈沖信號,再經信號處理模塊轉換后得到轉速角速度。
本測速工裝的硬件部分包括電源模塊和監測模塊。電源模塊由直流供電部分和濾波電路組成,所述濾波電路實現對空間和電網傳遞的電磁騷擾信號濾波,提高監測系統的抗擾度能力。監測模塊包括通信模塊、測速模塊和信號處理模塊,通信模塊依次與電源模塊、測速模塊、信號處理模塊連接,測速模塊依次與電源模塊、信號處理模塊連接。測速模塊和信號處理模塊放置于一個特質的屏蔽盒內,屏蔽空間傳遞的電磁騷擾信號,提高監測系統的抗擾度能力。
其中,測速模塊包括兩組光電轉換模塊、紅外線感應光電傳感器和光碼盤,紅外線感應光電傳感器包括發射模塊和接收模塊,接收模塊與信號處理模塊連接。接收模塊接收到測速終端反射的光信號,經由光電轉換模塊轉換成脈沖信號,再經信號處理模塊轉換后得到角速度,再根據GB/T 18029.21—2012 標準給出的公式計算輪椅車在試驗中和試驗后的平均輪速變化和轉向穩定性。
3 工裝的硬件結構
工裝的硬件結構如圖2 所示。其中,信號處理模塊將脈沖信號經過整流濾波、放大整流后,獲得相同頻率的方波信號,經過測量方波的頻率和周期,可以得到電動輪椅的角速度,根據標準給出的公式,可以計算出電動輪椅的轉向角度,信號處理模塊與通信模塊連接,通過藍牙將轉速和轉向信息傳輸到安裝APP的移動終端。工裝中的APP 通過藍牙信號與監測系統進行無線連接,可以實現對監測系統的啟動/停止控制,設置電動輪椅轉動輪的直徑,將測得的轉速角速度轉化為轉速。
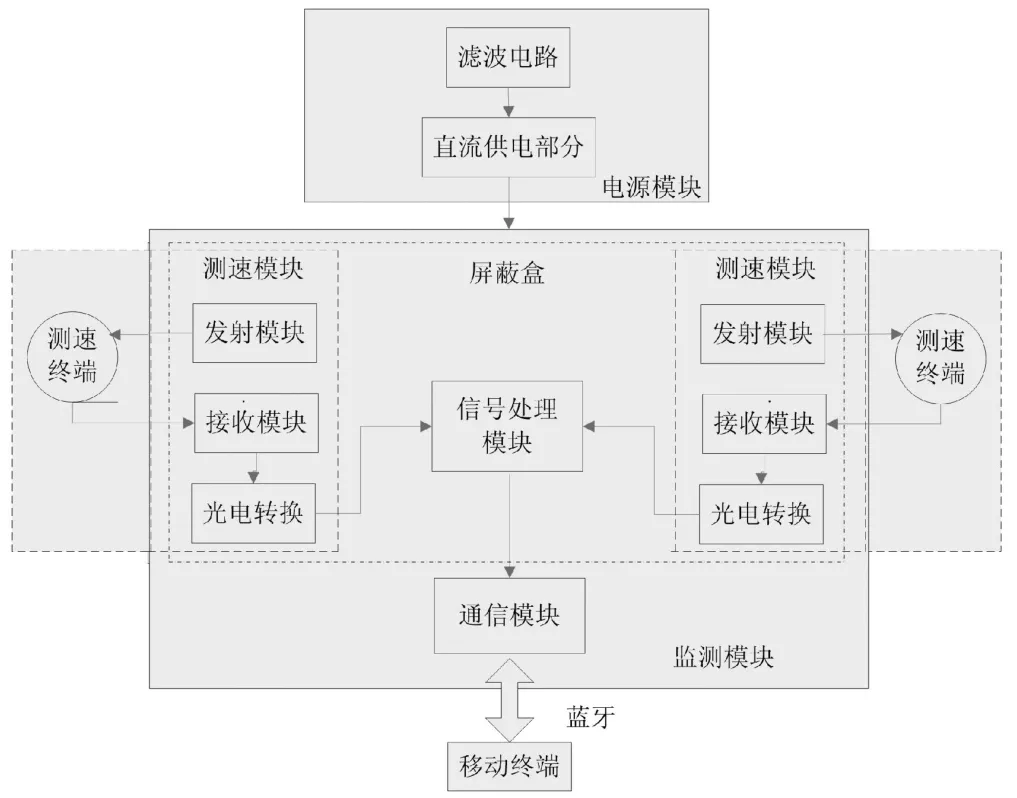
圖2 硬件結構
4 準確性驗證
為了驗證本工裝的測速準確性,采用市面上常見的激光轉速儀,且該激光轉速儀經相關計量單位檢定,測量10 臺不同公司的雙輪驅動的輪椅車在低、中、高擋位的左右輪轉速,并分別進行對比。10 臺輪椅車的數據測量完畢后,整理完成轉速的對比情況如表1 所示。
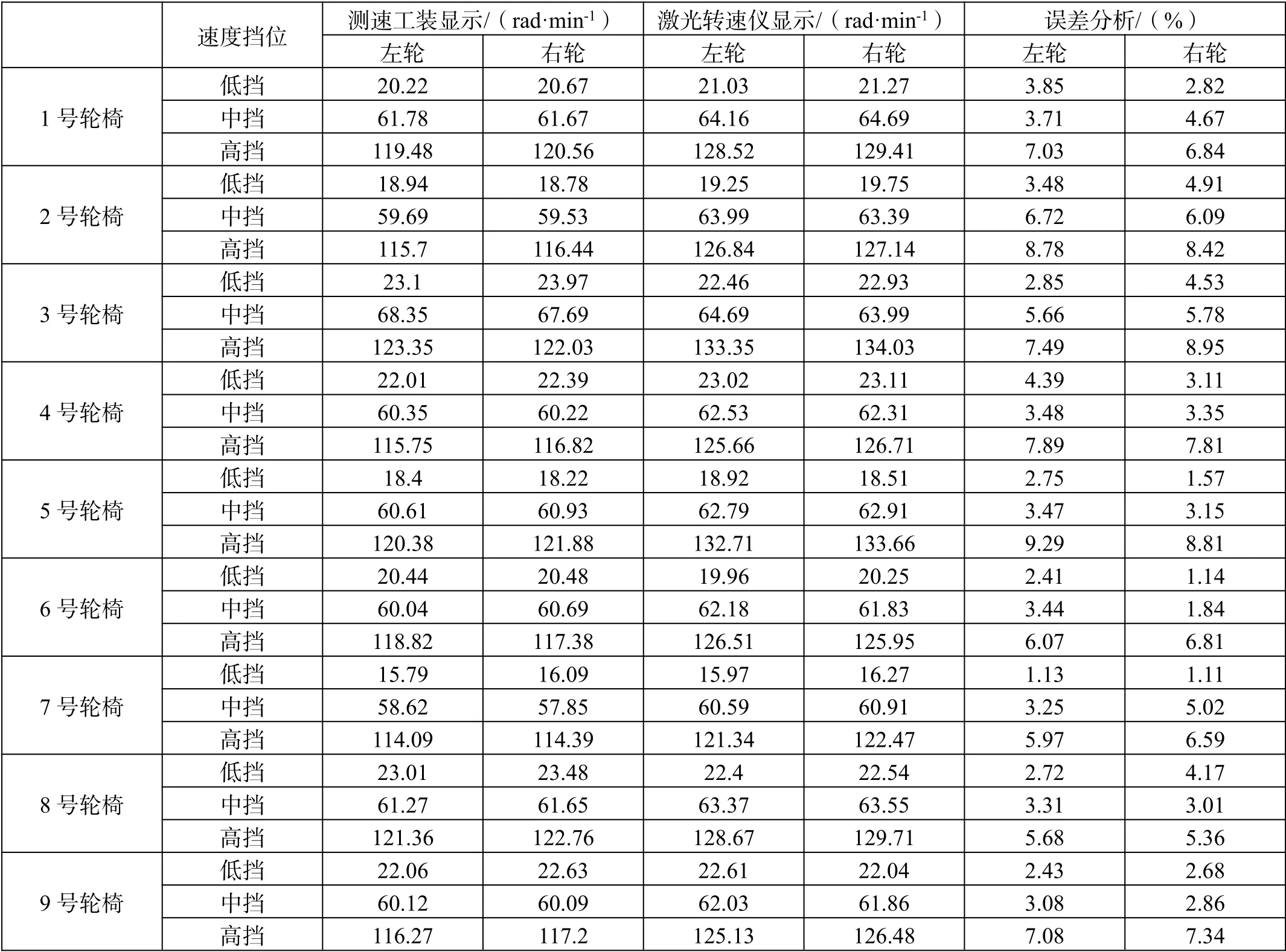
表1 轉速的對比表

表1(續)
經過對比測試結果,可以看出隨著輪速擋位的增加,工裝和激光轉速儀之間的誤差變大,最大的誤差為10.32%;在輪速低擋和中擋時,工裝和激光轉速儀之間的誤差范圍不大于6%。GB/T 18029.21—2012 要求輪椅車的行駛模式在速度設置為最大速度的50%±10%的狀態下進行抗擾度試驗,在試驗過程中使用經過有效計量的轉速計實時監測電動輪椅車的速度和轉向,平均輪速變化不超過±20%,差動輪速度變化不超過±25%。因此,該測速工裝對中擋輪速的監測精確度已滿足電動輪椅車在電磁兼容測試的要求。
5 結論
本測速工裝測得的車輪速度與激光轉速儀測得的速度平均誤差為4.84%。誤差產生的原因是:激光轉速儀測量距離對檢測精度的影響和電機自身產生的電火花對測量脈沖波形的干擾等。但兩者測量的速度比較接近,說明本測速工裝的方案可行。輪椅車的運行速度越高其測量誤差越大,說明本測速電路適用于低、中速工作的輪椅車。而適用于GB/T 18029.21—2012標準的電動輪椅車,對其最大速度有限制,而且輪椅車應在中速狀態下測試,可滿足此要求。并且,通過工裝的數據實時存儲功能,可以保證試驗前、試驗中和試驗后的數據溯源性。
