基于透鏡陣列的三維姿態(tài)角度測量
2022-03-08 03:45:14杜明鑫閆鈺鋒才存良白素平
中國光學 2022年1期
杜明鑫,閆鈺鋒,張 燃,才存良,于 信,白素平,于 洋
(長春理工大學 光電工程學院,吉林 長春 130022)
1 引 言
在航空航天領域,受重力、太陽輻射、機械振動等因素的影響,在航天器飛行過程中,有效載荷與基準點之間的連接臂會發(fā)生輕微變形[1-4]。有效載荷相對于基準面會發(fā)生小角度的偏轉,從而影響有效載荷的工作性能[5]。如果能夠實時、準確地測量偏轉角度,就可以通過軟件補償減少甚至消除影響,這要求測量系統(tǒng)具有體積小、功耗低、精度高的特點。另外,在進行深空激光通信時,需要保持兩個通信終端的準確對準和跟蹤,這是光通信鏈路成功建立和維護的關鍵。因此,體積小、功耗低、精度高的角度測量系統(tǒng)將在航天、航空和國防技術領域有廣泛的應用前景。
目前,微小角度檢測方法主要基于光學角度測量理論,如自準直法[6-8]、光柵法[9-10]、菲涅爾雙棱鏡法[11]、激光干涉法[12]、圖像處理[13-15]等。
自準直法可以利用反射圖像點的位置來實現(xiàn)角度測量,其測量精度由光學元件之間的距離決定。Konyakhin等通過補償算法消除了漸暈誤差的影響,提高了自準直儀的測量精度[16]。該方法可滿足二維角度的測量,但卻不能滿足三維角度的同時測量。
作為激光自準直儀的接收裝置,衍射光柵也可以用來測量角度。但是,由于入射光束與自準直儀單元軸線之間的夾角是一個未知參數(shù),所以帶衍射光柵的激光自準直儀只能用于測量相對角度。在該方法[17]中,采用飛秒激光器[18]和衍射光柵作為測量光源和反射器,利用反射器發(fā)出的光與飛秒光束的一階衍射光束可以準確識別一維角位移。
菲涅爾雙棱鏡可用于制作復式干涉儀,在雙束干涉條紋背景下,可獲得4束干涉圖案,然后通過改變雙棱鏡相對于剪切方向的相對軸向位置,實現(xiàn)角度測量或校準[19],具有靈敏度高和精度高的優(yōu)點。但菲涅爾棱鏡法的測量系統(tǒng)比較復雜,體積較大、環(huán)境適應性相對較差,并且一般只能測量俯仰或方位的相對角度,并不能實現(xiàn)三維角度的同時測量。
對于一些超小的旋轉角度,吳玉敏提出了一種基于角譜算法和全息過程中最小二乘相位展開的方法[20]來計算三維形狀。這種方法穩(wěn)定且有效。因此,根據(jù)曲面形狀與旋轉角度的關系,可以計算出實時旋轉角度。
以上測量方法并沒有很好地實現(xiàn)三維姿態(tài)角的同時測量,且在眾多工程應用領域中,角度測量尚有一些關鍵技術需要不斷深入研究,如實時測量、高精度、小型化等,而光學方法是解決角度測量問題的有效途徑之一。
本文提出了一種基于透鏡陣列的微小三維姿態(tài)角測量光學系統(tǒng),該系統(tǒng)主要由激光源、透鏡陣列和CCD組成。利用這種方法,可以同時得到俯仰、偏擺、滾轉3個角度。測量時,準直光束系統(tǒng)作為發(fā)射端;金字塔形排列的4個陣列透鏡放置在CCD前,構成接收端。光束透過透鏡陣列后,會在CCD上形成光斑陣列,對此數(shù)字圖像進行處理,通過水平和垂直方向的光斑位置變化,可以得到發(fā)射端相對于接收端的俯仰角和偏擺角;通過點陣在CCD上的旋轉可以得到發(fā)射端和接收端的滾轉角;最后可以獲取三維空間的位置角。本文提出的測量系統(tǒng)體積小,測量數(shù)據(jù)間可相互校準,測量數(shù)據(jù)可靠且可以實現(xiàn)三維角度的同時測量。
2 測量應用及方案
如圖1(a)所示,應用場景為軸對中的偏差檢測,角度測量裝置發(fā)射單元安裝在右端連接主動軸的電機上,接收單元安裝在左端與從動軸相連的減速器上。通過測量發(fā)射端發(fā)出的激光準直光束相對于接收端所在的CCD接收面之間的入射角度,并進行基準轉換即可獲得減速器相對于電機的俯仰、偏擺和滾轉3個角度。
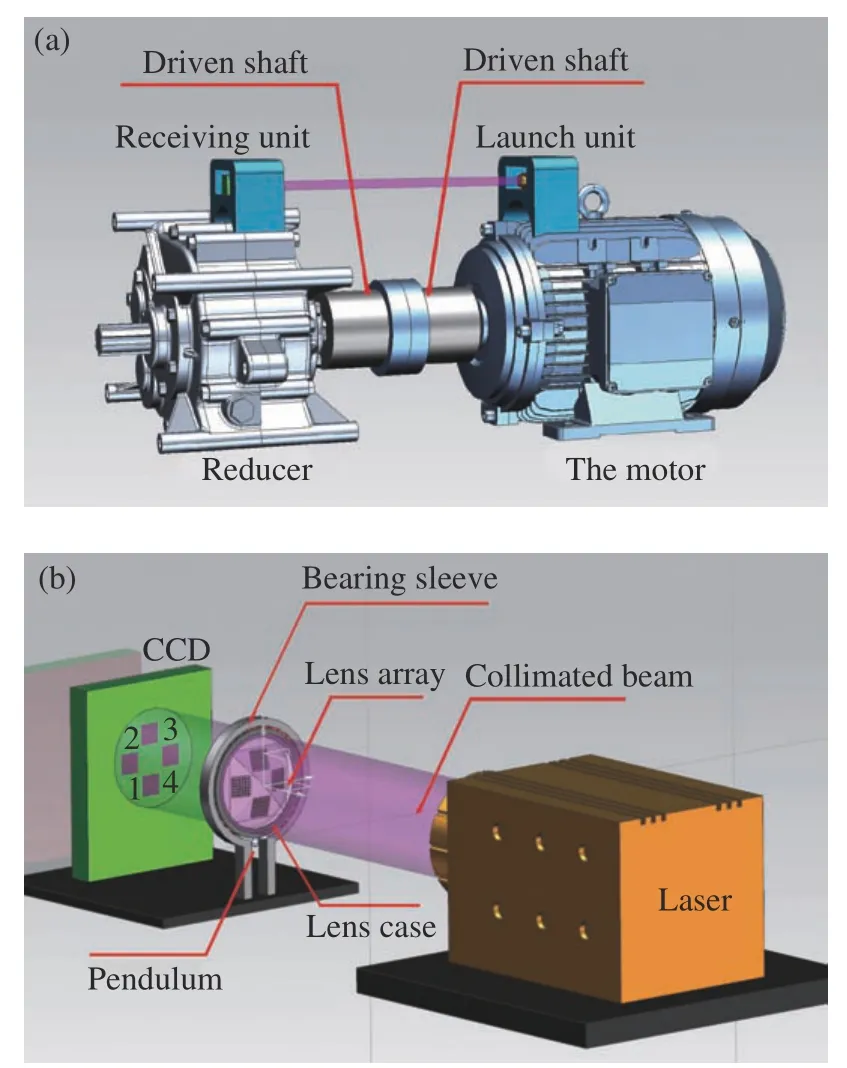
圖1 系統(tǒng)結構示意圖。(a)應用系統(tǒng)結構示意圖;(b)系統(tǒng)原理結構示意圖Fig. 1 Schematic diagram of the proposed system.(a)Structure diagram of application system; (b)structure diagram of system principle
圖1 (b),從細節(jié)上表達了角度測量裝置的原理,呈金字塔狀排列的4組陣列透鏡構成的光學元件作為CCD的入射光學系統(tǒng),陣列透鏡組安放在可繞過金字塔尖且垂直于CCD接收面的軸線旋轉,并設計擺錘結構,在重力作用下,始終使陣列透鏡豎直軸線保持鉛錘狀態(tài)。當接收端相對于發(fā)射端產生水平和垂直方向的角度傾斜即俯仰和偏擺變化時,CCD上接收的光斑會發(fā)生相對應的位置變化及光斑間距變化。如發(fā)生相對滾轉時,CCD靶面繞準直光束光軸發(fā)生滾轉,而陣列透鏡依然保持鉛錘狀態(tài),此時,準直光束透過陣列透鏡在CCD上形成的光斑會發(fā)生整體的旋轉偏移(如圖3所示)。分析光斑位置變化,建立光斑位置變化與入射角度變化的數(shù)學模型,可作為透鏡陣列測量三維姿態(tài)角的理論模型。
該測量方法與傳統(tǒng)的測量方法相比多引入了兩個系統(tǒng)參數(shù),分別是透鏡陣列的焦平面與CCD接收面之間的傾斜角和子透鏡間的距離,由此產生的數(shù)據(jù)冗余可提高測量系統(tǒng)的可靠性。該測量系統(tǒng)可廣泛應用于角度測量領域。
如圖1(b)所示,標號為1~4的4個透鏡陣列用于測量三維空間角度信息,在水平方向和垂直方向上呈對稱分布。其中1號和3號透鏡陣列分布在水平方向上,其他透鏡陣列分布在垂直方向上。4個透鏡陣列與CCD接收面之間的角度均相同,焦平面與CCD表面的角度也相同。水平方向的透鏡陣列1和3用于測量X方向的光分量,垂直方向的透鏡陣列2和4用于測量Y方向的光分量。
3 測量原理與參數(shù)分析
3.1 俯仰角和偏擺角
將陣列透鏡傾斜放置使得透鏡陣列中的各透鏡單元與垂直于光電接收器件接收面的平面之間的角度都相同,取其中兩個透鏡單元與光電接收器件構成的模型研究光線入射角度測量原理即可構建數(shù)學模型,多組透鏡依據(jù)該數(shù)學模型聯(lián)合解算,可尋求最優(yōu)解以提高精度。由于傾斜角在X和Y方向上建立的數(shù)學模型相似,所以只對Y方向和繞Z軸的數(shù)學模型建立過程進行分段描述。
如圖2所示,當入射光束只向Y軸方向傾斜(繞X軸旋轉)時,兩個透鏡陣列的中心分別用O1和O2表示,CCD接收面的法線分別用O1A1和O2A2表示。
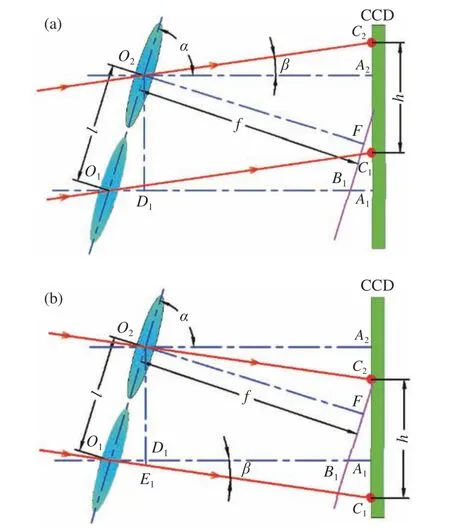
圖2 入射光的示意圖。(a)向上的入射光線,(b)向下的入射光線Fig. 2 Schematic diagram of the incident light. (a) Upward incident light; (b) downward incident light
β是被測光束的傾斜角,即入射光束的光軸與CCD接收面的法線之間的夾角。C1和C2分別表示CCD上的光斑中心點的位置。FB1表示透鏡陣列的焦平面,且O2F垂直于FB1,F(xiàn)是垂足。對于圖2所示的其他參數(shù),f是透鏡陣列的焦距,l是陣列中透鏡之間的距離,α是透鏡陣列與CCD的相對角,h是相鄰的光斑中心點之間的距離

根據(jù)圖2(a)所示的幾何關系,可以計算出被測光束的入射角β,那么光束在Y方向的入射角βy可以表示為

圖2(b)為下行情況下的示意圖。O2D1和O1C1交于點E1,入射光的角度βy為

同理,入射光束在X方向傾斜角 βx也可以用式(4)來計算

3.2 滾轉角
滾轉角是繞Z軸的傾斜角,它是光束與CCD基面之間的角度。理想情況下,當傾角為零時,CCD接收到的光斑陣列示意圖如圖3(a)所示,同一列或同一行光斑陣列的中心坐標相同,光斑中心的位置可視為參考位置。
如圖3(b)所示,當出現(xiàn)扭轉角時,陣列斑點的坐標將發(fā)生移動。因此,可以根據(jù)點陣中心點的偏移來計算扭轉角。那么扭轉角可以表示為
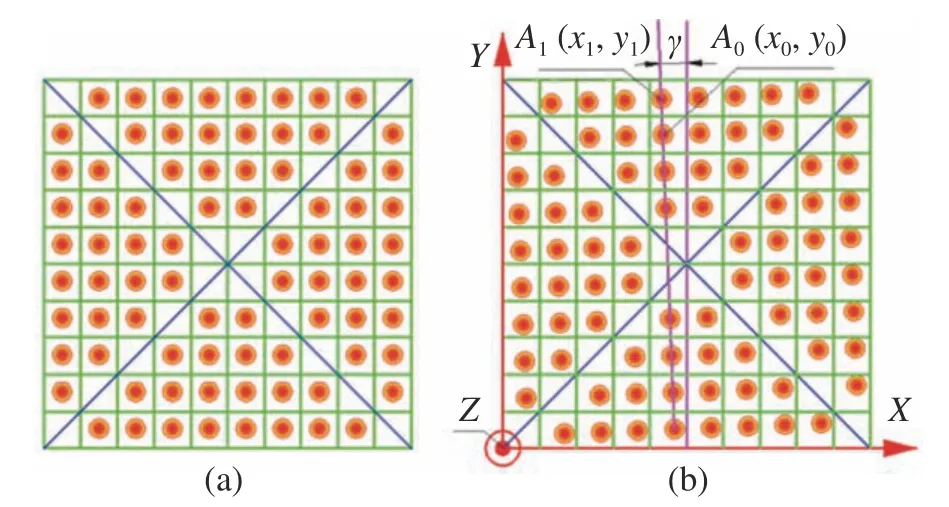
圖3 扭轉角示意圖。(a)扭轉角為0時的斑點示意圖;(b)扭轉角為γ 時的斑點示意圖Fig. 3 Schematic diagram for the torsion angle. (a) The spots′ schematic diagram when the torsion angle is 0; (b) the spots′ schematic diagram when the torsion angle is γ
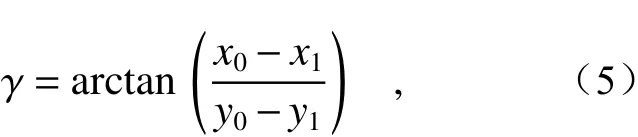
其中,(x0,y0) 和 (x1,y1) 分別為A0點和A1點的質心坐標。
這樣通過改變多組陣列斑點的坐標,就可以得到扭轉角的多組數(shù)據(jù)。為了減少隨機誤差,引入了扭轉角的平均值,通過計算多組陣列斑點,也可以計算出制造和裝配時造成的系統(tǒng)誤差。
3.3 透鏡陣列參數(shù)分析
為了獲得更多近似六邊形孔徑透鏡的模型數(shù)據(jù),在制作陣列透鏡的過程中,在同一基板上使用了多個間距的陣列元件,陣列在3.5mm×3.5mm范圍內以不同的間距排列,如圖4所示。相鄰兩個透鏡元件之間的距離分別為1.25 mm、1 mm、0.875 mm和0.5 mm。可以發(fā)現(xiàn),相鄰兩個透鏡單元之間的距離越小,獲得的信息就越多,越有利于提高實驗精度。綜合考慮后,透鏡陣列的距離選用0.5 mm。透鏡材料的折射率為1.49。每個透鏡單元的焦距為6 mm,曲率半徑為2.94 mm[21-25]。
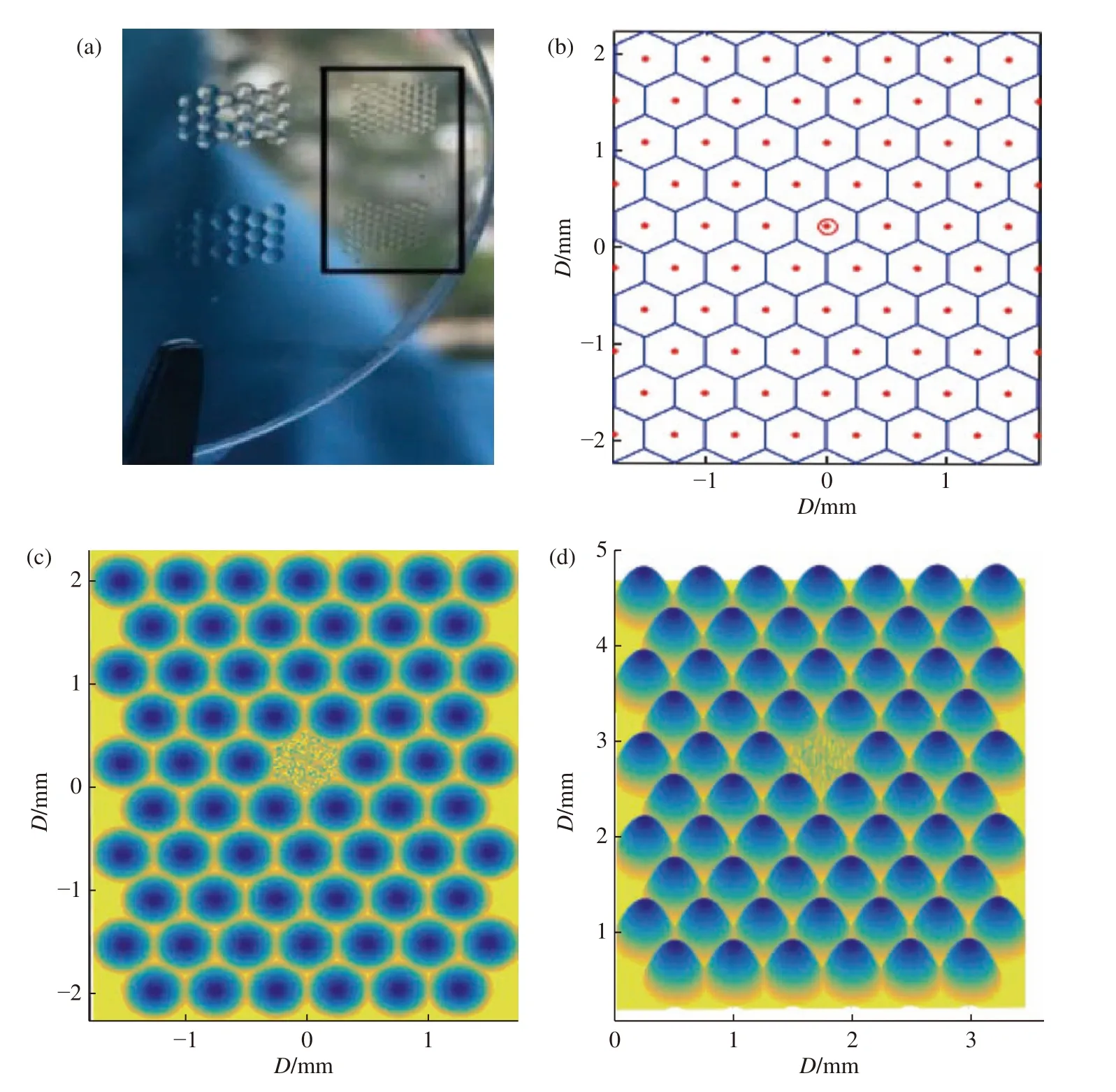
圖4 透鏡陣列的實物圖和模擬圖。(a)透鏡陣列實物圖;(b)透鏡陣列尺寸圖;(c)透鏡陣列俯視圖;(d)透鏡陣列側視圖Fig. 4 Physical picture and simulation charts of the lens array. (a) Physical picture of the lens array; (b) size of the lens array;(c) top view of the lens array; (d) side view of the lens array
為了保證CCD獲得的光斑圖像可以進行數(shù)字圖像處理,而不受衍射環(huán)對測量結果的影響,光斑不能相互重疊。光源經(jīng)透鏡單元衍射成像,一階衍射角為

其中,D為透鏡的單位孔徑,λ為光源的波長。本文中,D=0.5 mm,He-Ne激光器的波長為632.8 nm,所以一階衍射角為:

CCD上一階衍射環(huán)的直徑為:

其中,陣列透鏡到CCD的最大距離是b,由此可以得到

對于數(shù)字成像來說,CCD上相鄰兩個點之間的距離約為0.5mm,而一階衍射環(huán)的直徑遠小于相鄰點之間的距離。因此,衍射對測量結果的影響可以忽略不計。
此外,還可以通過控制CCD與陣列透鏡之間的距離、相對角度、透鏡的焦距、陣列間距等參數(shù),保證光斑與CCD重疊。
由于陣列透鏡與CCD 接收面的相對角度α屬于安裝參數(shù),透鏡陣列與CCD發(fā)生相對傾斜后使部分光斑離焦而產生像差,為保證成像質量,陣列透鏡與CCD 接收面的相對角度 α設計為30°,可以通過高精度標校儀器對其值進行標定,再通過相關冗余實驗數(shù)據(jù)進行數(shù)據(jù)擬合,得出最佳α補償值以提升測量數(shù)據(jù)可靠性,此時的離焦距離范圍控制在?0.18~0.18 mm內,不會對質心計算產生影響[26],無光斑重疊現(xiàn)象,為形成優(yōu)質的光斑圖像提供保障。
3.4 多點圖像中心點的處理方法
在對光斑圖像進行預處理后,可以通過瞬時光斑質心檢測法確定光斑質心的準確位置[27]。第一子光圈光斑質心的計算公式為

通過對相鄰光斑距離數(shù)據(jù)的處理,可以計算出光斑距離的平均值和光斑間距測量值的殘余誤差。
通過殘余誤差觀察法可以觀察到正、負殘余誤差的數(shù)量。如果正、負誤差的數(shù)量幾乎相等,且誤差的分布明顯是隨機的,可以肯定這組測量數(shù)據(jù)不存在系統(tǒng)誤差。那么,通過貝塞爾函數(shù)可以得到相鄰光斑之間距離的標準差。
根據(jù) 3σ 標準,如果|vi|>3σ,則認為測量值中含有應消除的粗大誤差。對點間距值進行循環(huán)處理,直到粗大誤差完全消除。剩余的值是沒有粗大誤差的最佳點間距測量值。
3.5 陣列透鏡與 CCD 接收面的相對角度的標定與補償
由式(1)可知,在光線入射角度 β 未知、光斑間距h已知的情況下,通過h一個變量不能計算出 α 的值,所以,可采用多組數(shù)據(jù)共同計算出 α,并對其進行補償。
依次給式(1)中的未知量 β 一個微小的增量Δβ,并將初始的未知量 β 用 β0表示,h隨著增量Δβ 的變化而改變,可以得到n個方程:
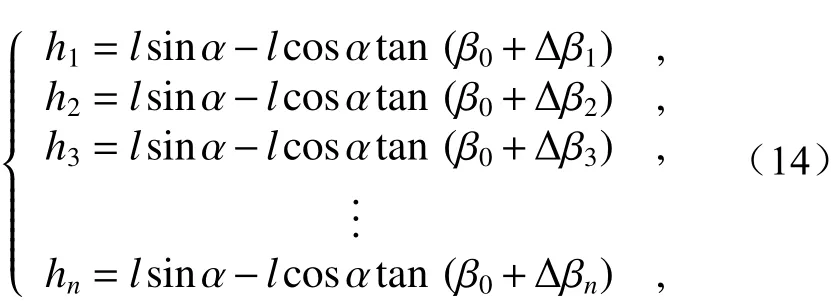
其中,l是 已知量,α 和β0為 未知的定量,h隨著增量Δβ改 變。所以,可將 Δβ看 作自變量(用x表示),h看作因變量(用y表示)。式(14)可改寫為:
即:

式(16)分別經(jīng)過點(x1,y1),(x2,y2)···(xn,yn),α 和 β0是未知參數(shù)。通過曲線擬合的方法,求出參數(shù) α 和 β0的 值,并得出最佳α 補償值,此時的 α值置信度更高,可以有效地減少入射光源對其準直度的影響并減少溫度變化等外界因素對測量結果產生的影響,從而提升了測量數(shù)據(jù)的可靠性。
4 實驗結果與分析
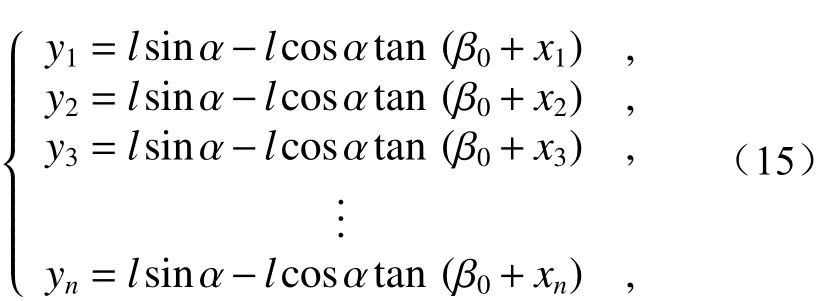
4.1 實驗平臺
通過對比實驗驗證本文測量方法的有效性。如圖5所示,實驗裝置主要由兩部分組成。第一部分是基于自準直儀的三維角度測量系統(tǒng),它由自準直儀1、自準直儀2和自準直儀光線接收反射裝置組成。自準直光線接收反射裝置安裝在三維調節(jié)臺上。兩個自準直器的光軸相互垂直。自準直儀1測量繞X軸和Y軸的旋轉角度。自準直儀2測量繞Z軸的旋轉角度;實驗系統(tǒng)中按正交排列的自準直儀有兩個,它們的測量精度均優(yōu)于0.1″。第二部分是基于陣列透鏡的三維角度測量系統(tǒng)。它主要由光源、錐形排列的微透鏡陣列和CCD相機組成。實驗中,CCD的分辨率為2 048 pixel×2 048 pixel。
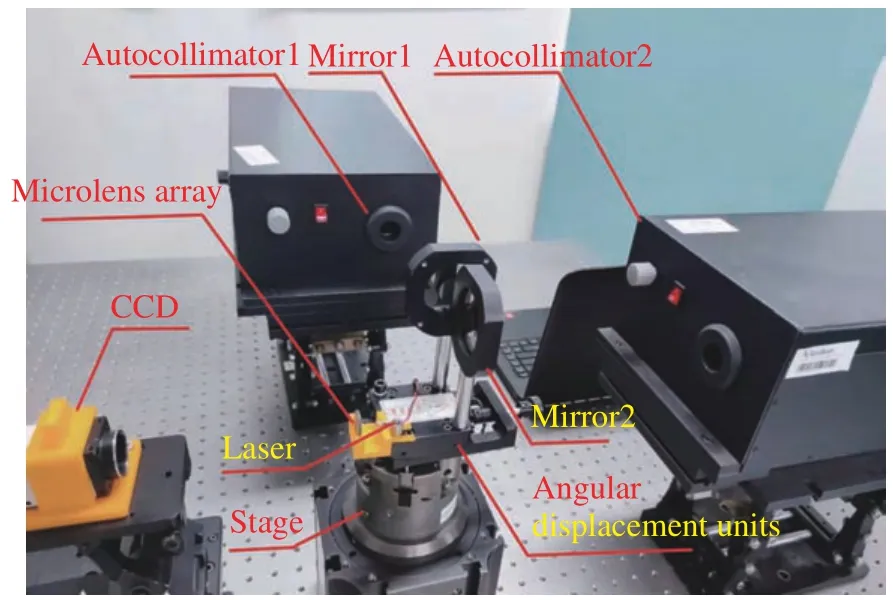
圖5 實驗裝置圖Fig. 5 Experimental set-up
錐形排列的微透鏡陣列與自準直儀的反射鏡均固定在三維調節(jié)臺上。通過調整三維調整臺,分別產生X、Y、Z軸方向的角度增量。此時,對本文提出的方法與雙自準直儀方法的測量結果進行對比。
4.2 α 值的補償
通過運動控制器控制轉臺順時針轉動一個角度,在自準直儀上讀出角度增量 Δ β 的準確數(shù)值,同時截取光斑圖,通過圖像處理可以得到x方向的相鄰光斑間距h,如此循環(huán),累計采集23組數(shù)據(jù),可以得到角度增量 Δ β(1≤i≤23) 以及相對應的 23組相鄰光斑間距值hi。
要想進行陣列透鏡與C CD接收面的相對角度α的標定與補償,需要先對相鄰光斑間距hi值進行數(shù)據(jù)處理,以第7組為例,圖6為第7組光斑示意圖,計算得到相鄰光斑間距的平均值為=0.70605mm,并計算得到各相鄰光斑間距hi值的殘余誤差vi,根據(jù)判斷殘余誤差計算正確。
圖6 第7組光斑圖Fig. 6 The seventh group of light spots
由于圖像中共有80個光斑數(shù)據(jù),將殘余誤差帶入式(13),可得到相鄰光斑間距的標準偏差為:

根據(jù)萊伊達準則剔除粗大誤差數(shù)據(jù),該組相鄰光斑間距最佳值為h=0.7057mm。
同理,再將其余的22組數(shù)據(jù)依次作上述處理。
對這 23 組數(shù)據(jù)進行數(shù)據(jù)擬合,為完成式(16)的非線性復雜模型的估算求解,采用最小二乘法進行擬合,并找出最優(yōu)解,圖7為相鄰光斑間距數(shù)據(jù)擬合圖。
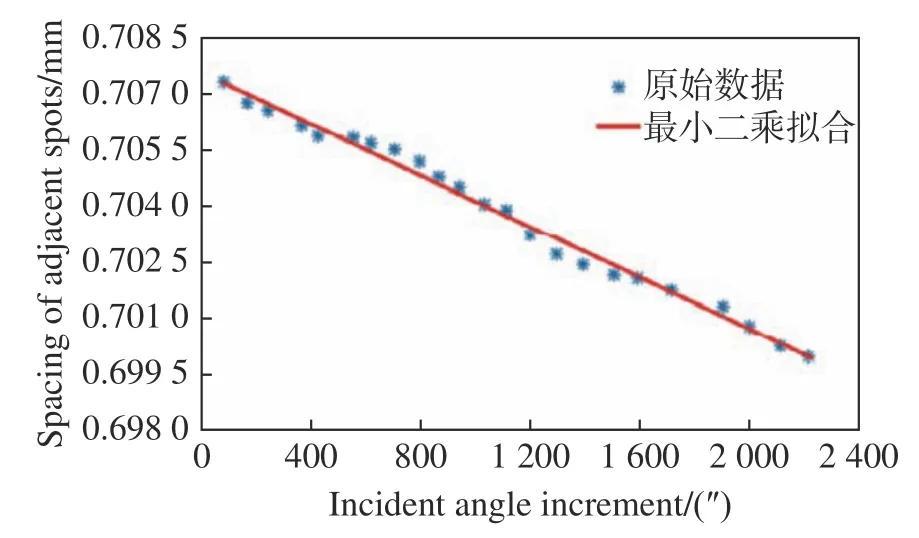
圖7 相鄰光斑擬合曲線Fig. 7 Fitting of adjacent spots
陣列透鏡與光電接收器件的相對角度 α的偏差屬于系統(tǒng)誤差,通過 α的角度標定進行系統(tǒng)誤差補償。即通過有相對真值特性的入射角度增量,得到 α值的補償信息,用一次函數(shù)進行最小二乘擬合,得到最佳調整補償,相鄰光斑間距h與光線入射角度 β 的關系為:

4.3 實驗結果分析
在對 α進行標定補償后,實驗演示了入射光線在X、Y、Z方向旋轉的角度差與相鄰陣列光斑之間的距離變化。
當入射光束僅有Y方向上的傾斜角時,對應角度光斑圖像如圖8所示,此時在豎直方向上的光斑間距會隨傾斜角度的改變而呈現(xiàn)一定的變化規(guī)律。
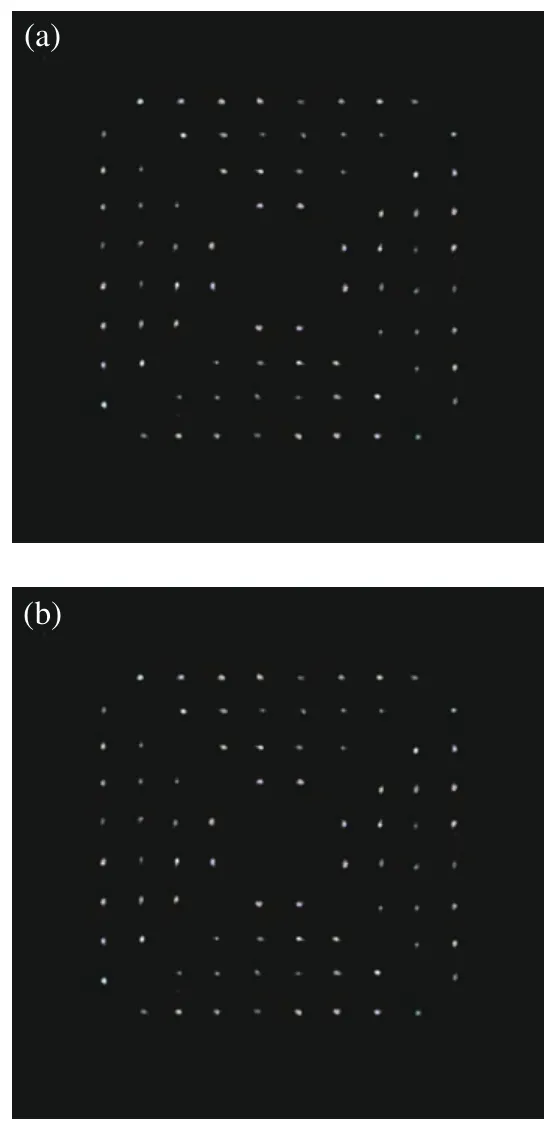
圖8 不同βy值時的光斑陣列圖像。(a) βy = 250″;(b) βy =500″Fig. 8 Spot array images with different βy when βx = 0;(a) βy = 250″;(b) βy = 500″
對多組傾角進行測量可以得到從透鏡2和4獲得的陣列點之間的平均距離以及傾斜角βy值,如圖9所示,其中的hx或hy的距離分別由所有行或列的相鄰光斑距離的平均值得到。
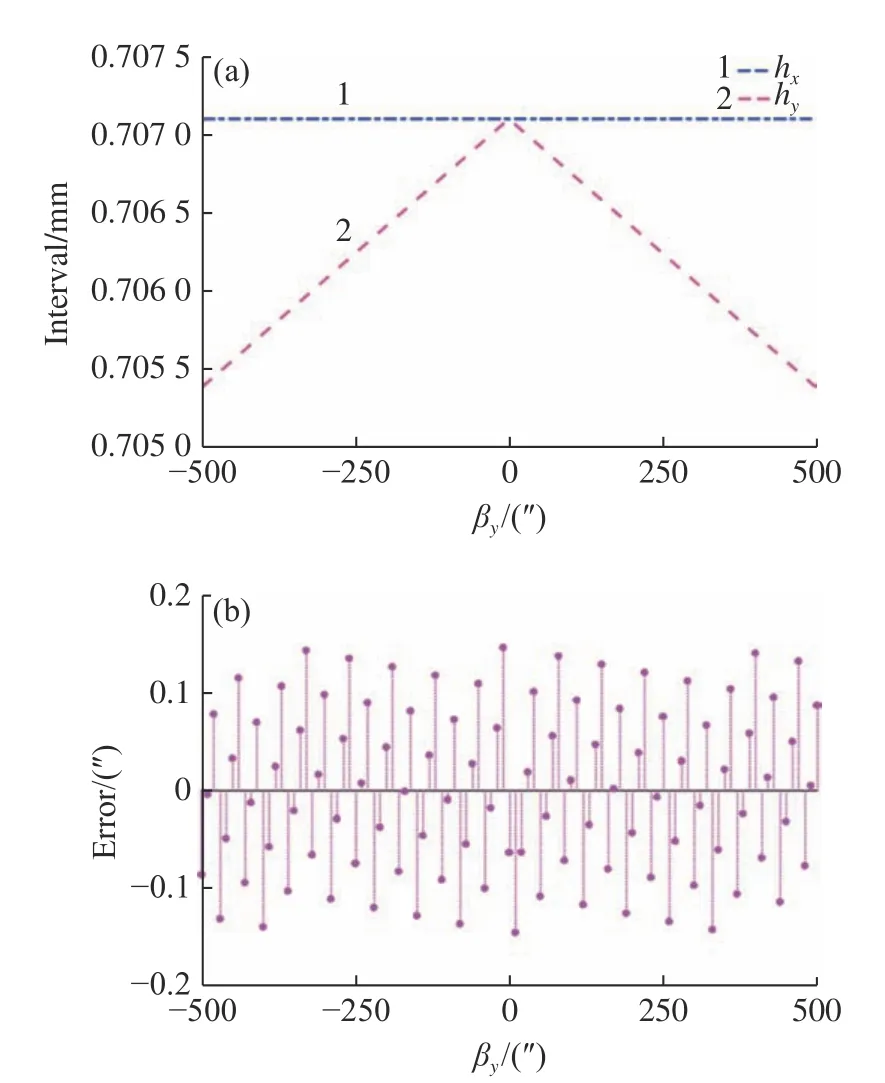
圖9 Y方向的測量結果。(a) 質心間距隨 βy 變化的曲線;(b) 與自準直儀相比的誤差曲線Fig. 9 Measurement results in the Y direction. (a) Centroid spacing changing with βy; (b) error curves in comparison with autocollimators
從圖9(a)可以發(fā)現(xiàn),X方向上相鄰陣列光斑之間的距離保持在預期水平,而Y方向上相鄰陣列光斑之間的距離則隨著與平衡點的角度βy差值的增大而趨于減小,βy=0為相鄰陣列光斑距離的最大處。圖9(b)顯示了自準直儀與系統(tǒng)之間的誤差,RMS為0.085″。
同樣,當入射光束僅在X方向上有傾斜時,角度光斑圖像如圖10所示,此時在水平方向上的光斑間距會隨傾斜角度的改變而呈一定的變化規(guī)律。
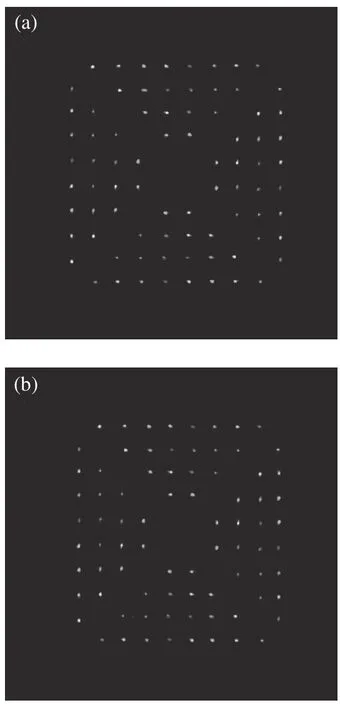
圖10 βx值不同時的光斑陣列圖像。(a) βx = 250″;(b) βx =500″Fig. 10 Spot array image with different βx. when βy = 0.(a) βx = 250″; (b) βx = 500″
從透鏡1和透鏡3獲得的陣列點之間的平均距離以及傾斜角βx的值,如圖11所示。
陣列點在Y方向上的距離hy保持不變,而在X方向上的距離hx隨著偏離平衡位置 βx=0的角度增強而趨于減小。
與基于自準直儀的測量系統(tǒng)相比,其誤差曲線如圖11(b)所示,其中RMS為0.094″。由于測量結構的對稱性,當入射光束的角度或方向傾斜時,也會出現(xiàn)類似現(xiàn)象,如圖11所示。
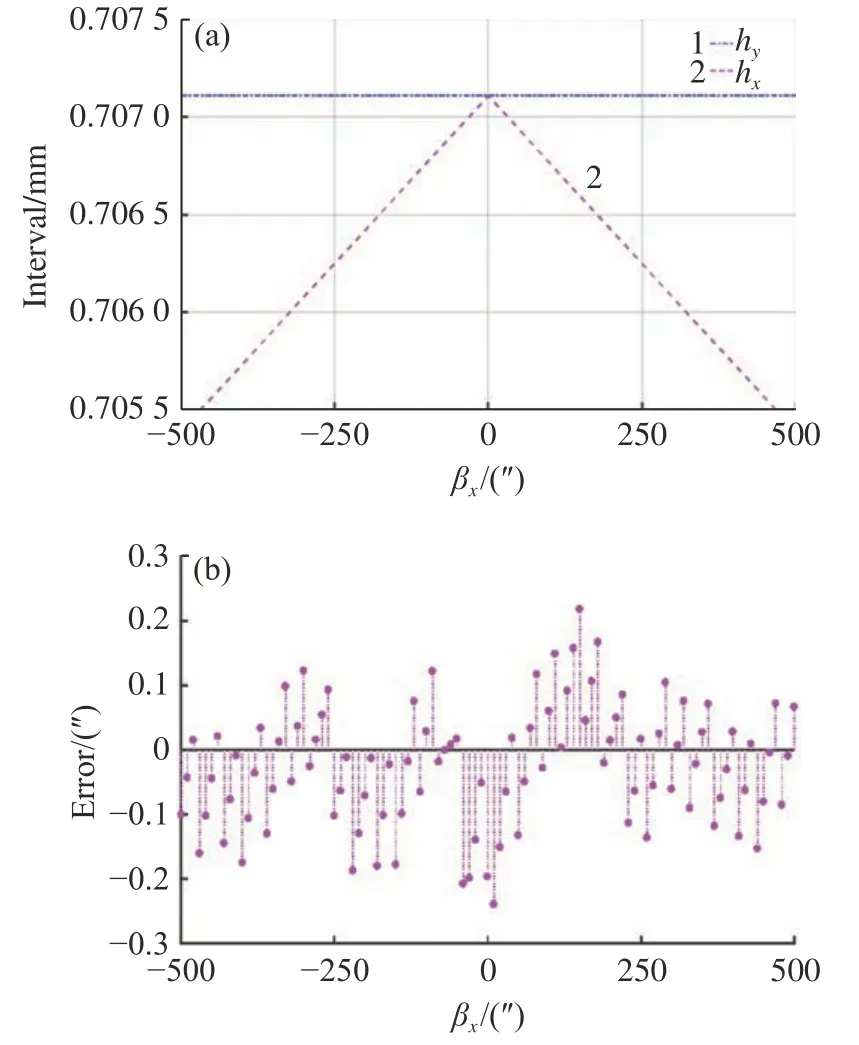
圖11 X方向的測量結果。(a) 中心點間距隨 βx 變化的曲線;(b) 與自準直儀相比較的誤差曲線Fig. 11 Measurement results in the X direction. (a)Centroid spacing changing with βx; (b) error curves in comparison with autocollimators
圖12(彩圖見期刊電子版)為質點 Δx、Δy與扭轉角 γ的變化關系。如果X方向上斑點質心Δx的變化為正值,則光束順時針旋轉,否則逆時針旋轉。在Y方向上斑點質心的變化 Δy隨著扭轉角的幅度增加而增大。因此,當順時針旋轉時,測量結果為負,反之則為正。此外,特征點的軌跡近似于圓。
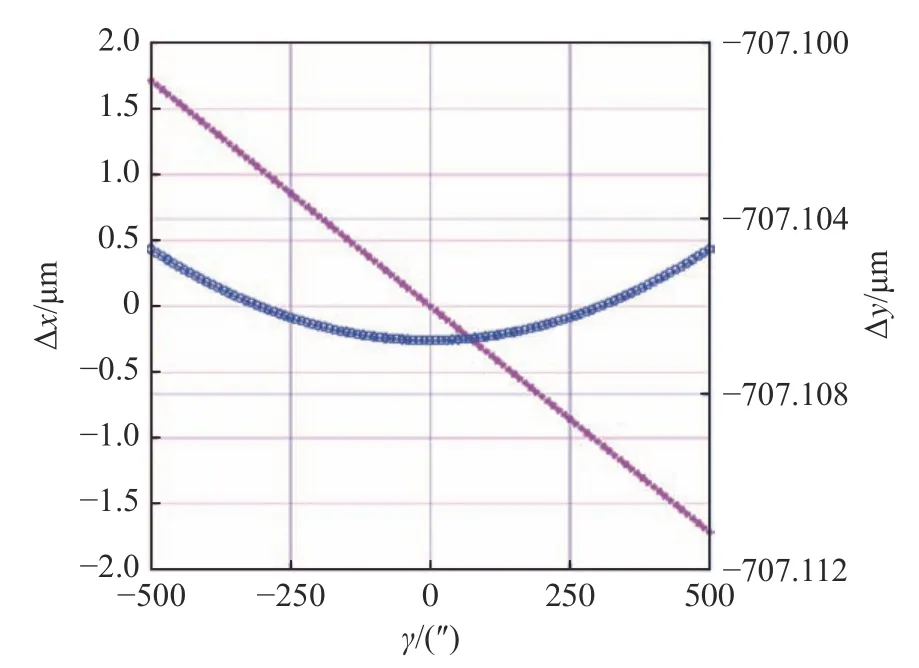
圖12 中心點隨Z方向傾角變化曲線Fig. 12 Curve of centroid varying with inclination angle in the Z direction
選取透鏡陣列1~4形成的光斑中的幾組特征點,計算入射光束向Z軸方向傾斜時質心(Δx,Δy)的變化,由式(5)可得到平均扭轉角γ。陣列點在X、Y方向的距離不變,與自準直儀相比,測量誤差曲線如圖13所示(彩圖見期刊電子版),其中扭轉角γ 的RMS為0.092″。
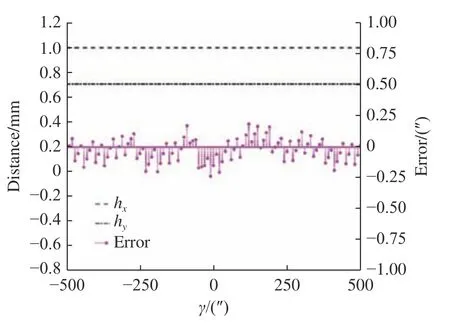
圖13 自動準直儀的對比度誤差和X和Y方向的光斑間距Fig. 13 Contrast error compared with the results measured with autocollimator and spot spacing in X and Y directions
5 結 論
針對三維空間微小角度測量的問題,提出了一種基于四棱錐透鏡陣列的三維空間微小角度測量方法。建立了陣列光斑與三維位置角的解析關系。通過相關的實驗,充分驗證了所提出的測量三維角度的數(shù)學模型。所提出的系統(tǒng)可以實現(xiàn)對空間三維角的精確測量,并具有體積小、便攜的優(yōu)點。
該方法與自準直儀之間的誤差均方根值小于0.1',說明這兩種方法的測量精度相當。
如果所提出的系統(tǒng)能在一些實際測量場合中使用,可考慮的挑戰(zhàn)性問題如下:在實際應用中,由于環(huán)境因素的影響,發(fā)射光源的性能會發(fā)生輕微變化。由于光束質量下降,陣列光斑的光束發(fā)散和質量中心會發(fā)生變化,從而導致角度的測量誤差。因此,為了保證發(fā)射光源的穩(wěn)定性,必須進行溫度補償和非熱性設計。否則,可能會產生不準確的實驗結果。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
- 中國光學的其它文章
- 《中國光學》約稿信
- 院士訪談
- Enhancing the fluorescence emission by flexible metal-dielectric-metal structures
- 《發(fā)光學報》
——EI核心期刊(物理學類;無線電電子學、電信技術類) - Illustrating the Helmholtz-Kohlrausch effect of quantum dots enhanced LCD through a comparative study
- Fabrication of an ultra-narrow band-pass filter with 60 pm bandwidth in green light band