融合分層連續梯度特征的高鐵隧道漏纜卡扣檢測
2022-03-07 05:40:30張云佐宋洲臣郭威董旭
光學精密工程 2022年3期
關鍵詞:特征
張云佐,宋洲臣,郭威,董旭
融合分層連續梯度特征的高鐵隧道漏纜卡扣檢測
張云佐*,宋洲臣,郭威,董旭
(石家莊鐵道大學 信息科學與技術學院,河北 石家莊 050043)
基于局部二值模式的深度挖掘算法和多特征融合算法是提取鐵路隧道漏纜卡扣特征的有效方法,但它們存在描述子表述性不強且特征維度過高的問題。提出分層連續梯度二值模式,能夠實現卡扣輪廓特征的尺度變換并降低描述子的特征維度,提高故障卡扣圖像的分類準確率。首先采用改進的中心對稱局部二值模式和根據全局灰度均值獲得的自適應閾值,計算采樣圓域的梯度方向特征,得到完整的初步梯度方向特征圖;然后在此特征圖上進行兩次連續的下采樣迭代,并分別提取這兩幅下采樣特征圖的連續梯度特征;最后,將這兩層不同尺度的連續梯度特征串聯作為描述子,用支持向量機完成漏纜卡扣圖像的故障檢測任務。實驗結果表明,本文所提算法的召回率和精準度分別達到了0.923和0.857,相較于局部二值模式、中心對稱局部二值模式、以及該系列的多種變體算法有明顯的優勢。
故障檢測;漏纜卡扣;尺度變換;連續梯度;局部二值模式
1 引 言
鐵路運輸目前是解決我國人口流動和物資輸送的主要交通方式,特別是隨著運載量的不斷加大,保障鐵路通信系統的正常工作就顯得尤為重要。山區隧道段的通信網絡主要通過覆蓋泄漏電纜來實現,通常將漏纜懸掛在隧道壁上,并用專門的卡扣固定[1]。高速列車經過隧道時產生的氣壓和能量波會對卡扣造成影響,潮濕的地質環境也會加速卡扣的松動及脫離。漏纜卡扣的主要檢測手段是人工定點定期逐一排查,這種檢測方式不僅嚴重受制于環境因素和人為因素,還存在極大的安全隱患。近些年,隨著來鐵路隧道里程的不斷增加,這種傳統的排查方法已很難再滿足實際的需要,漏纜卡扣的自動化檢測成為發展的必然趨勢。結合計算機視覺的漏纜卡扣檢測技術主要有以下兩個環節:首先需要在列車的窗口處安置一臺高速攝像機,隨列車采集在隧道運行過程中拍攝的全段畫面;再用計算機處理漏纜卡扣數據,逐幀提取特征,完成卡扣的檢查工作。當前數據采集部分已經實現,但檢測部分仍停留在人工回放視頻排查故障的階段,因此還需要不斷優化特征提取算法,以實現漏纜卡扣的自動化檢測。
基于統計學習[2]的手工檢測算法主要通過深度特征提取[3]以及多特征融合[4]的方式來提升檢測的準確率。局部二值模式(Local Binary Pattern, LBP)[5]作為基礎的紋理算子,一方面常被當作融合特征的成員特征,另一方面又是很多深度特征的原始算子。中心對稱局部二值模式(Center-symmetric Local Binary Pattern, CS-LBP)[6]便是在LBP的基礎上將原先的幅值分量轉變為梯度分量,引入中心對稱差分信息來獲取待檢測目標的感興趣區域。另外,完備的局部二值模式(Completed Local Binary Pattern, CLBP)[7]進一步完善了符號分量、幅值分量、以及全局灰度分量三者的融合特征表述,在很大程度上提升了描述子的魯棒性。梯度直方圖特征(Histograms of Oriented Gradients, HOG)[8]作為另一種基礎局部算子,其紋理特性與LBP截然不同,其主要作用是刻畫待檢測目標的輪廓特征。為了進一步提升描述子的質量,HOG-LBP[9]這樣的融合特征被提出,可它存在描述子維度過高的問題。為提升運算效率,采用主成分分析法(Principal Component Analysis, PCA)[10]分別對HOG-LBP的融合特征、HOG-CLBP[11]的融合特征進行降維,或者只針對候選區域(Region of Interest, ROI)[12]進行特征提取,通過縮小檢測范圍達到降低維度的目的,但都無法避免相關特征的丟失。文獻[13]提出了積極因子和消極因子局部二值模式(Attractive-and-Repulsive Center-Symmetric Local Binary Pattern, ARCS-LBP),并將二者的融合特征作為描述子,雖然增強了對紋理的處理能力,但還是以單一尺度為處理前提,并不能有效解決漏纜卡扣圖像出現的尺度不匹配問題。三斑塊局部二值模式(Three Patch Local Ternary Pattern, TPLBP)[14]雖將提取特征的基本單元拓展到像素塊,能在一定程度上放大目標的特征尺度,但需計算像素塊之間的相似性差異,所以運算量非常龐大。盡管深度學習近些年在故障檢測領域表現突出,如基于SSD模型實現了漏纜卡扣故障檢測[15],但也存在計算復雜度高、參數調整困難[16]的問題。特別是在故障卡扣圖像數據集規模不夠的情況下,反倒是基于統計學習的局部特征更加靈活,有更出色的檢測性能[17]。
本文提出的分層連續梯度局部二值模式(Layered Continuous Gradient Local Binary Pattern, LCG-LBP)屬于統計學習范疇,不僅對多尺度特征進行了降維,其編碼的連續梯度特征對漏纜卡扣的輪廓還有很強的表述性,下采樣過程也實現了卡扣特征的尺度變換,在隧道場景中表現出極強的魯棒性。LCG-LBP算法在區分故障卡扣圖像時有更強的識別能力。
2 相關算法
傳統的LBP描述子最初由Ojala等人提出,因它能敏銳捕獲細致紋理之間的灰度差異,同時還具有較好的旋轉不變性和灰度不變性,至今仍廣泛應用于人臉識別和紋理分類領域。該算法的核心思想是在以為半徑的圓形鄰域內,比較中心像素與鄰域內個采樣像素點之間的灰度值,再利用布爾函數計算出僅包含0和1的一串二進制序列,最后按統一順序轉換成十進制的LBP編碼值。相應的計算公式為:


其中:n表示圓形鄰域上第個采樣點的灰度值,其大小可以用雙線性插值法來確定,c表示中心像素的灰度值。為了增強LBP描述子在空間方向上的表述能力,Heikkila等人提出了CS-LBP描述子,取代了LBP關于編碼鄰域采樣點與中心像素差值信息的方式,僅針對四組徑向分布的中心對稱采樣點進行編碼。相應的計算公式為:

需要對比多組實驗的特征提取效果,才能較好地評估式(4)中的閾值。通常可以根據輸入圖像的全局灰度情況或者鄰域采樣像素的灰度情況來確定,本文選擇CS-LBP算子作為改進的基礎模型主要有以下三方面原因:
(1)在相同采樣個數和采樣半徑的條件下,如圖1所示,CS-LBP編碼的特征向量更緊湊,描述子的特征維度也遠低于LBP;
(2)CS-LBP繼承了LBP良好的紋理特性,還拓展了四組徑向分布的梯度差分信息;
(3)CS-LBP在處理圖像的平緩區域能夠有更強的穩定性,許多關于圖像匹配的實驗也證明了CS-LBP 算子比單獨使用梯度算子或者幅值算子有更好的魯棒性。

圖1 LBP和CS-LBP采樣方式
3 本文算法
3.1 改進CS-LBP算法
傳統的CS-LBP只說明了采樣圓域內的某個直徑方向或者某些直徑方向存在梯度差,并沒有明確指出梯度的方向究竟在哪一側。所以本文在此基礎上保留了CS-LBP關于比較中心對稱采樣點灰度差值的編碼方式,但同時必須明確標識出每組中心對稱采樣點灰度值高的那一側,以獲取更具體的梯度方向信息,即將二進制編碼位數擴展到8位。而作為此環節輸出的初步梯度方向特征圖,也不再將像素值進行十進制轉換,而是直接輸出編碼方式的二進制形式。
圖2為采用改進的CS-LBP算法計算初步梯度方向的過程,圓域內取采樣個數=8,采樣半徑=1,閾值=10。用雙線性插值法先確定圓形鄰域內所有采樣點的灰度值,再依次計算每組中心對稱采樣點的灰度差值,最后比較差值與閾值,以此確定梯度的方向。若絕對值大于閾值,則將灰度值大的采樣點對應的計數位標記為1,此計數位便是這組采樣像素對的梯度方向;同時,將灰度值小的采樣點對應的計數位標記為0。若絕對值不大于閾值,則兩個采樣點對應的計數位都標記為0,表示這組采樣像素對沒有梯度。經計算可得出圖2中只存在45°,90°,315°這3個梯度方向,所以只將這3個方向對應的計數位標記為1,其余方向位均標記為0。于是從0°開始逆時針進行編碼,求得的二進制編碼值為10000110。
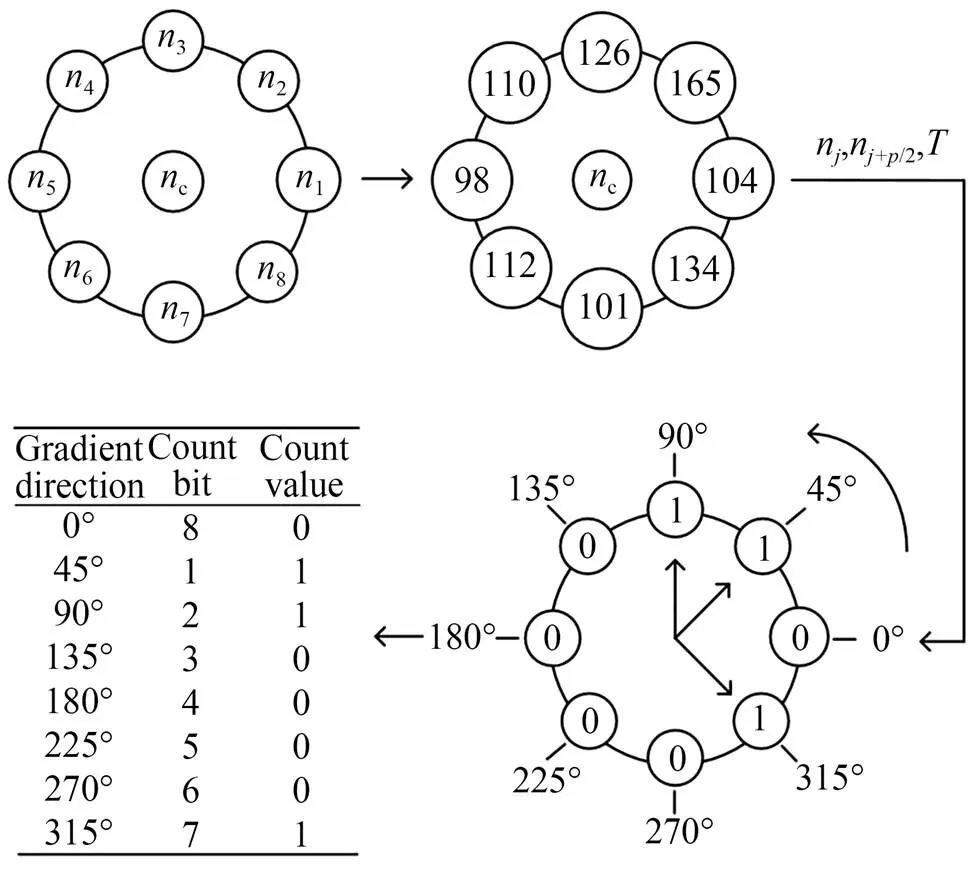
圖2 初步梯度方向特征計算
對整幅高斯濾波后的圖像重復上述運算,得到完整的初步梯度方向特征圖,每個像素的取值都唯一對應了一種由八位二進制數字0或1構成的一維數組。該過程的具體計算公式如下:




其中:表示元素個數為的一維數組,即采樣點的個數為,閾值通過實驗獲取。
3.2 下采樣梯度方向特征圖
上一個環節得到的初步梯度方向特征圖中,每一個一維數組的像素值都有81(34)種二進制排布形式,如果直接在此特征圖上提取連續梯度特征,所得到的描述子特征維度會過于龐大。所以本文提出了一種有效的降維模式,一方面能減少二進制像素值排布形式的總數,另一方面還能實現特征圖的尺度變換。采用關鍵梯度方向來表示像素塊的整體梯度趨勢,目的是將原本單個像素的81種取值轉換為像素塊的8種有效取值,方便計算接下來的連續梯度特征。按照圖3(a)的梯度方位圖進行排序,逆時針方向分布的數字1~8分別對應了8個梯度方向,將像素塊內所有像素的二進制像素值按相同的計數位逐一累加后,計數和最大的計數位就是該像素塊的關鍵梯度方向。圖3(b)中的Cell結構是由,,,4個像素組成的像素塊,以獲取此Cell的關鍵梯度方向特征為例,圖4為關鍵梯度的計算過程。

圖3 Cell單元
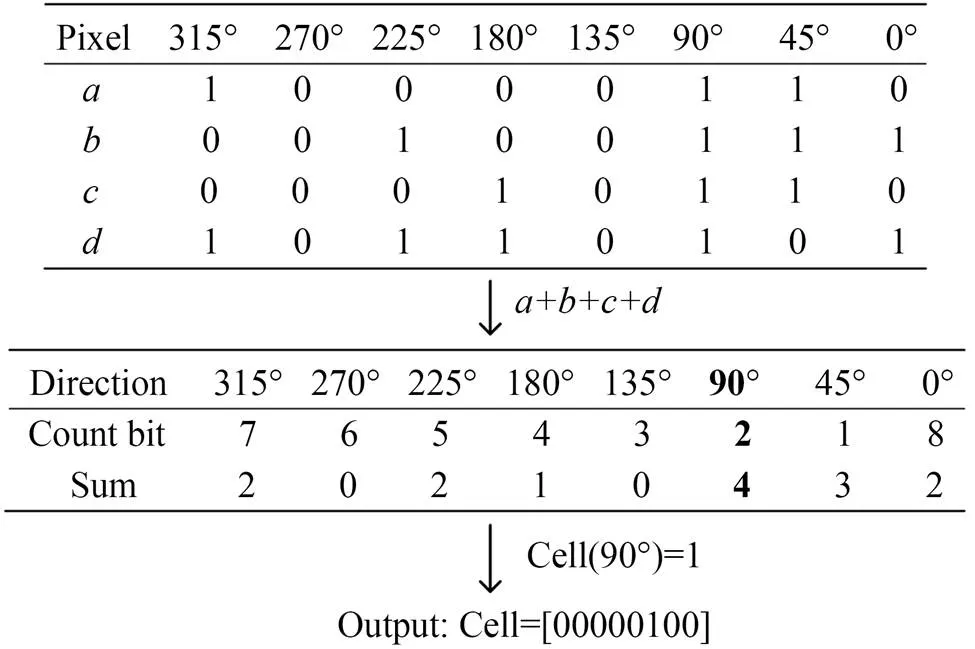
圖4 關鍵梯度計算
首先用改進后的CS-LBP算法依次計算這4個像素對應的一維數組像素值;再將這4個一維像素值按相同的計數位逐一累加,可以發現90°方向的計數最多,出現了4次;最后得到該Cell的關鍵梯度方向為90°,即Cell的輸出編碼值為00000100,具體的計算公式如下:



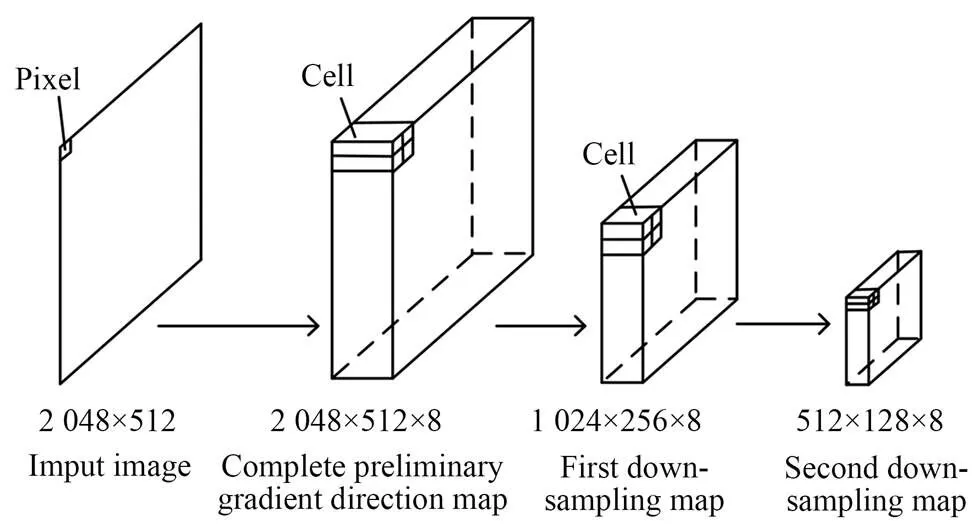
圖5 下采樣過程
3.3 連續梯度特征
LBP的一些深度挖掘算子以及該系列的融合特征算子,基本只針對局部采樣點的灰度差值做紋理特性分析,其尺度單一且存在明顯的局限性。所以,本文分別在兩次下采樣后的特征圖上提取連續梯度特征,不僅實現了特征圖的尺度變換,還通過目標輪廓在拐點和邊線處的梯度變化關系提升描述子的質量。為了與下采樣過程中的Cell單元進行區分,在采樣特征圖上提取連續梯度特征時定義3×3的窗口為一個Block,通道數為8,滑動步長stride為1。之所以處理單元選擇3×3是因為8個領域采樣點都與中心采樣點相鄰,能更好地反映梯度連續這一關鍵特性,同時該系列算法也主要使用3×3的窗口采樣,8個二進制計數位更符合編碼的習慣。
在Block內按梯度方位圖的逆時針方向做環形排序,統計所有基準通道和相鄰通道非中心像素的最大連續序列長度。首先逐一確定存在中心像素的通道并以此通道為基準,如果所有通道都不存在中心像素,則該Block不輸出連續梯度特征。圖6中只有通道2,4存在中心像素,所以只針對這兩個通道進行特征提取。通道2中自身的8個鄰域采樣像素最大的連續序列長度為4,相鄰的通道1最大的連續序列長度為1,相鄰的通道3最大的連續序列長度為2,于是得到通道2的連續梯度特征編碼結果為2412。其含義表示為以通道2為基準,通道2,1,3的最大連續序列長度分別為4,1,2。由于通道4自身的最大連續序列長度小于3,所以該通道也不輸出特征。
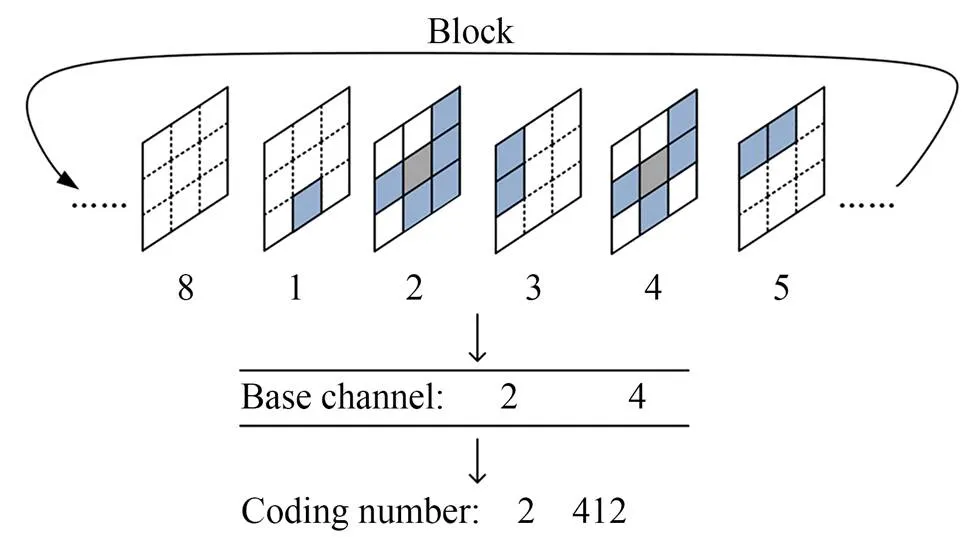
圖6 連續梯度特征計算
連續梯度特征的計算步驟和限制條件如下:
(1)先在8通道的Block內確定存在中心像素的通道,并以這些通道為基準通道,若所有通道都不存在中心像素,則該Block不輸出特征。
(2)接著判斷基準通道在其3×3鄰域內,最大連續序列長度是否大于2,若不滿足則該Block不輸出特征。
(3)最后分別統計與基準通道相鄰的兩個通道的最大連續序列長度,當連續序列長度大于3時,仍然將序列長度標記為3。
連續梯度特征輸出的編碼形式為基準通道編號和3個相應通道的最大連續序列長度,編碼總個數為768(8×6×4×4)種。
4 實 驗
實驗運行環境所采用的CPU為Intel Xeon E5-2697 v2、運行內存為96GB、硬盤存儲空間為8 TB。漏纜卡扣圖像數據用雙線CMOS相機全程跟車拍攝,其中故障卡扣圖像195張,正常卡扣圖像900張,取輸入圖像數據集的70%作為訓練集,剩下的30%作為測試集。圖7簡述了獲取漏纜卡扣分層連續梯度特征的完整流程,最后用支持向量機(Support Vector Machine, SVM)完成故障卡扣的分類任務。由于原始圖像的尺寸非常龐大,需要先經歷兩次裁剪,再通過高斯濾波和區域插值預處理,使輸入圖像的尺寸縮小到256×256。提取連續梯度特征的Block尺寸為3×3,兩次下采樣過程的Cell尺寸為2×2,它們的通道數均為8。
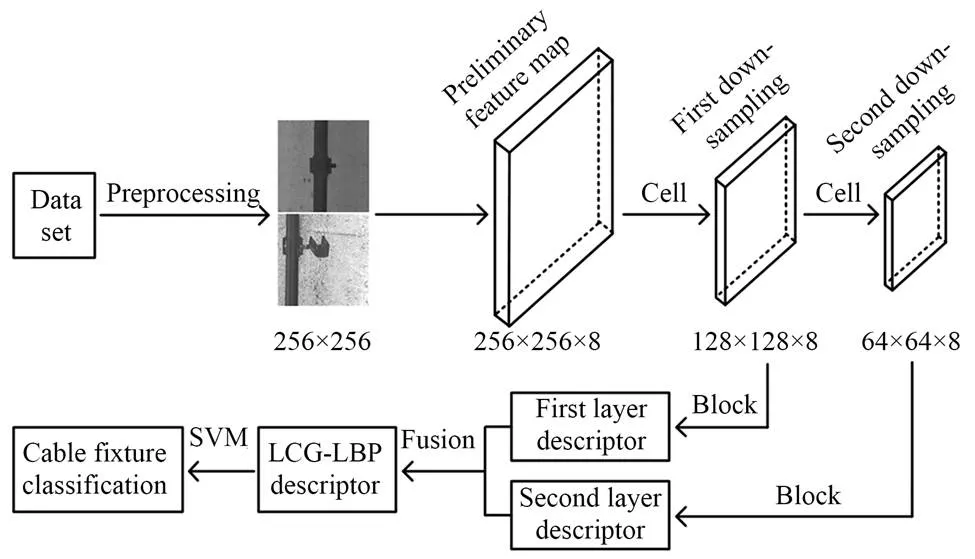
圖7 漏纜卡扣分層連續梯度特征處理實驗流程
4.1 計算自適應閾值T
為了獲得合適的閾值,將全局灰度均值分成9個區間,每個區間分別挑選了5~6張圖像,共50張,通過實驗方法來分析灰度均值與閾值的對應關系。在滿足以下兩點要求的前提下,閾值的取值應盡可能大。
(1)必須保證初步梯度方向特征圖能完整清晰地顯示漏纜卡扣的輪廓。
(2)能夠在一定程度上過濾掉隧道墻壁上的背景噪聲。
表1列出了部分全局灰度均值分布在不同區間的卡扣圖像,以及它們在不同閾值情況下初步梯度方向特征圖的成像效果。然后根據卡扣輪廓是否清晰、完整、背景噪聲的過濾情況,綜合考慮閾值的取值。于是得到閾值的具體計算公式為:

全局灰度均值處于80~220之間時,采用取整函數計算相應的閾值;全局灰度均值小于80時,閾值等級最低,=4;全局灰度均值大于220時,閾值等級最高,=11。根據式(8)對輸入圖像采用改進的CS-LBP算法逐一計算初步梯度方向特征,得到相應的初步梯度方向特征圖。
表1不同灰度-閾值的成像效果分析

Tab.1 Image effect analysis of different gray-thresholds
4.2 計算連續梯度特征
部分典型特征例如漏纜卡扣的拐點或者邊線在第三次下采樣的特征圖中表現得并不明顯,大量連續梯度特征在第三次及以后的下采樣特征圖上出現得并不多,所以在實驗過程中只進行了兩次下采樣。分別對兩次下采樣后的特征圖提取連續梯度特征,并將這兩組連續梯度特征進行串聯,得到最終的融合特征描述子,特征維度為1 536(768×2),此算法不用對圖像進行分塊處理。
4.3 實驗結果及分析
實驗采用召回率、精準度、描述子的特征維度Bin,AUC數值、以及對圖像提取特征所需的平均時間作為評價指標。其中,召回率是指被正確判斷為故障的卡扣占所有故障卡扣的比例,精準度是指被正確判斷為故障的卡扣占所有被判斷為故障卡扣的比例,具體計算公式為:

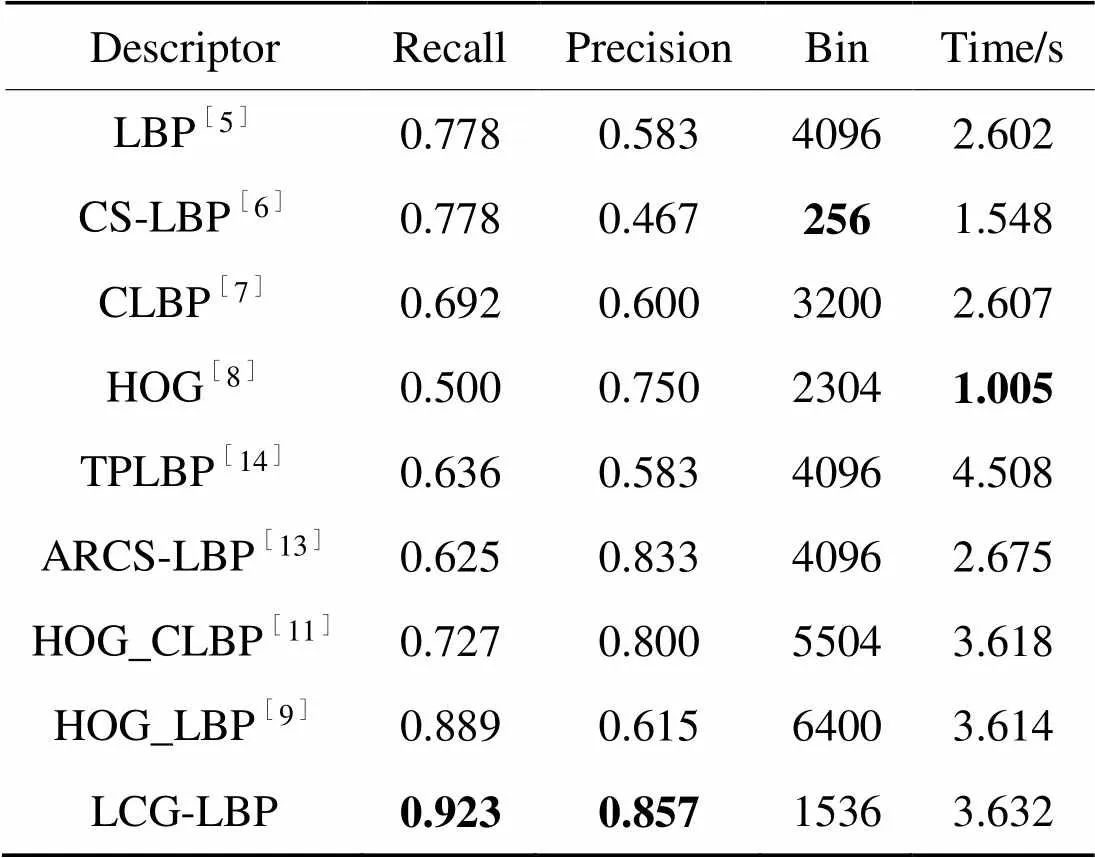
為了證明本文算法MVG-LBP在提取漏纜卡扣輪廓特征上的優越性,將它分別與CS-LBP,HOG等多種算法進行比較,實驗結果如表2所示。
表2檢測結果對比
Tab.2 Comparison of detection results
這幾種算法的參數設定情況如下:
(1)LBP和CS-LBP的采樣半徑為1,采樣個數為8,用雙線性插值法進行區域采樣。實驗中需要先對圖像進行4×4無重疊劃分,得到LBP描述子的特征維度為4 096(256×4×4),CS-LBP描述子的特征維度為256(16×4×4)。
(2)完備的二值模式(CLBP_Sriu2 1,8/_Mriu2 1,8/C)用雙線性插值法進行區域采樣,采樣半徑為1,采樣個數為8。每一個采樣圓域內的局部符號算子CLBP_S和局部幅值算子CLBP_M均使用旋轉不變均勻模式編碼。實驗中該方法需要先對輸入圖像進行4×4無重疊劃分,每個分區子圖像的特征維度為200(2(+2)2),于是得到該描述子的特征維度為3 200(200×4×4),在后面的表格和圖中將以CLBP代指該方法。
(3)HOG特征的Block為16×16,步長Stride為16,每個Block單位中梯度分量的Bins為9,所以輸出描述子的特征維度為2 304(9×16×16)。
(4)TPLBP和ARCS-LBP都采用雙線性插值法進行采樣,采樣半徑為1,采樣個數為8,實驗中需對輸入圖像進行4×4無重疊劃分,描述子的特征維度都為4 096(256×4×4)。
(5)HOG_LBP和HOG_CLBP是指將先前得到的HOG描述子分別與LBP描述子和CLBP描述子進行串連,得到二者的融合特征,相應描述子的特征維度直接累加。
通過表2可以看出,本文所提算法LCG-LBP在漏纜卡扣的檢測上表現出顯著的優勢。其中,召回率和精準度分別達到了0.923和0.857,HOG_LBP的融合特征能夠使召回率達到0.889,但其精準度只有0.615,這說明有大量的正常卡扣被誤判為故障卡扣。雖然CS-LBP描述子的特征維度最低,提取特征的速度也相對較快,但召回率和精準度都偏低,無法滿足漏纜卡扣的檢測需求。HOG算法提取卡扣特征的速度最快,但與CLBP和LBP進行融合之后,它們的速度優勢相較于LCG-LBP并不明顯,還增加了特征維度。其他的變體算法如CLBP,ARCS-LBP,TPLBP,雖然都對卡扣特征進行了深度挖掘,但它們的召回率和精準度都明顯低于LCG-LBP。
通過圖8所示的ROC曲線可以看出,LCG-LBP的AUC數值最高,達到了0.988,說明該算法能夠有效完成故障卡扣和正常卡扣的分類任務。LCG-LBP相較于傳統LBP及其變體算法,沒有對原圖像進行分塊處理,但第一層下采樣的輸出特征圖與將圖像進行2×2劃分后得到的最小分區子圖像的尺寸一致,第二層下采樣的輸出特征圖與圖像進行4×4劃分后的最小分區子圖像的尺寸一致。本文針對關鍵梯度的出現頻率進行下采樣,對特征圖縮小了兩次,這在很大程度上減少了提取連續梯度特征的計算量。實驗中兩次下采樣得到的特征圖,不僅包含了卡扣輪廓特征的關鍵梯度信息,還實現了卡扣輪廓特征的尺度變換,將不同尺度下的連續梯度特征串聯得到最終的描述子。采用LCG-LBP算法計算得到的描述子的特征維度,低于大部分該類型深度挖掘算法以及特征融合算法得到的描述子,檢測能力明顯更強。

圖8 ROC曲線
5 結 論
本文提出了LCG-LBP算法,相較于LBP及其變體算法,通過多個下采樣特征圖實現對卡扣輪廓特征的尺度變換,不僅提高了計算連續梯度特征的效率,也降低描述子的特征維度。連續梯度特征還能更準確地反應漏纜卡扣的輪廓,特別是拐點和邊線處的梯度信息。實驗中召回率和精準度分別達到了0.923和0.857,明顯優于其他對比算法,適用于高鐵隧道場景中故障卡扣的檢測。
[1] 田川,劉鑫,劉立海,等. 鐵路隧道GSM-R漏纜掛設高度研究[J]. 鐵道工程學報, 2019, 36(10): 82-87.
TIAN CH, LIU X, LIU L H,. Research on the hanging height of GSM-R leaky coaxial cable in the railway tunnel[J]., 2019, 36(10): 82-87. (in Chinese)
[2] 李彥,趙其峰,閆河,等. Canny算子在PCBA目標邊緣提取中的優化應用[J]. 光學精密工程, 2020, 28(9): 2096-2102.
LI Y, ZHAO Q F, YAN H,. Optimized application of canny operator in PCBA target edge extraction[J]., 2020, 28(9): 2096-2102. (in Chinese)
[3] 黃鴻,李政英,石光耀,等. 面向高光譜影像分類的多特征流形鑒別嵌入[J]. 光學精密工程, 2019, 27(3): 726-738.
HUANG H, LI ZH Y, SHI G Y,. Multi-features manifold discriminant embedding for hyperspectral image classification[J]., 2019, 27(3): 726-738. (in Chinese)
[4] 范賜恩,冉杰文,顏佳,等. 顏色空間統計聯合紋理特征的無參考圖像質量評價[J]. 光學精密工程, 2018, 26(4): 916-926.
FAN C E, RAN J W, YAN J,. No-reference image quality assessment using joint color space statistical and texture feature[J]., 2018, 26(4): 916-926. (in Chinese)
[5] OJALA T, PIETIK?INEN M, HARWOOD D. A comparative study of texture measures with classification based on featured distributions[J]., 1996, 29(1): 51-59.
[6] HEIKKIL? M, PIETIK?INEN M, SCHMID C. Description of interest regions with local binary patterns[J]., 2009, 42(3): 425-436.
[7] GUO Z H, ZHANG L, ZHANG D. A completed modeling of local binary pattern operator for texture classification[J]., 2010, 19(6): 1657-1663.
[8] DALAL N, TRIGGS B. Histograms of oriented gradients for human detection[C]. 2005(05)June 20-25, 2005, San Diego, CA, USA. IEEE, 2005: 886-893.
[9] WANG X Y, HAN T X, YAN S C. An HOG-LBP human detector with partial occlusion handling[C]. 200912292,2009,,, 2009: 32-39.
[10] ZENG C B, MA H D. Robust head-shoulder detection by PCA-based multilevel HOG-LBP detector for people counting[C]. 2010202326,2010,,IEEE, 2010: 2069-2072.
[11] 堯佼,于鳳芹. 基于候選區域定位與HOG-CLBP特征組合的行人檢測[J]. 激光與光電子學進展, 2021, 58(2): 165-172.
YAO J, YU F Q. Pedestrian detection based on combination of candidate region location and HOG-CLBP features[J]., 2021, 58(2): 165-172. (in Chinese)
[12] 李溫溫,劉富,姜守坤. 指節紋圖像感興趣區域提取與特征識別算法[J]. 吉林大學學報(工學版), 2019, 49(2): 599-605.
LI W W, LIU F, JIANG SH K. ROI extraction and feature recognition algorithm for finger knuckle print image[J].(), 2019, 49(2): 599-605. (in Chinese)
[13] MERABET YEL, RUICHEK Y, IDRISSI AEL. Attractive-and-repulsive center-symmetric local binary patterns for texture classification[J]., 2019, 78: 158-172.
[14] WOLF L, HASSNER T, TAIGMAN Y. Effective unconstrained face recognition by combining multiple descriptors and learned background statistics[J]., 2011, 33(10): 1978-1990.
[15] 張云佐,楊攀亮,李汶軒. 基于改進SSD算法的鐵路隧道漏纜卡具檢測[J]. 激光與光電子學進展, 2020, 57(14): 141005.
ZHANG Y Z, YANG P L, LI W X. Leaky coaxial cable fixture detection based on improved SSD algorithm[J]., 2020, 57(14): 141005. (in Chinese)
[16] REN C X, LEI Z, DAI D Q,. Enhanced local gradient order features and discriminant analysis for face recognition[J]., 2016, 46(11): 2656-2669.
[17] CHEN J, PATEL V M, LIU L,. Robust local features for remote face recognition[J]., 2017, 64: 34-46.
Detection of leaky cable fixture in high-speed railway tunnel with layered continuous gradient fusion feature
ZHANG Yunzuo*,SONG Zhouchen,GUO Wei,DONG Xu
(,,050043,),:888
Deep mining algorithms and multi-feature fusion algorithms based on local binary patterns are effective methods for extracting the fixture features of leaky cables in railway tunnels; however, there are disadvantages that the descriptors are not expressive enough and that their feature dimensions are too high. In this paper, layered continuous gradient local binary pattern (LCG-LBP) was proposed, which could realize the scale transformation of leaky cable fixture features. It could reduce the feature dimension of the fusion descriptor extracted from down-sampling feature maps. It could also improve the classification accuracy of faulty fixture images effectively. First, the improved algorithm based on center-symmetric local binary pattern (CS-LBP) and the adaptive threshold obtained by the global gray average value were used to calculate the gradient direction feature in a circle domain unit, and the complete preliminary gradient direction feature map was obtained in this way. Then, two consecutive down-sampling iterations were performed on this preliminary feature map to obtain two down-sampling feature maps, and the continuous gradient features were extracted from these two down-sampling feature maps. Finally, the two layers of continuous gradient features in different scales were connected in series as a fusion descriptor, and a support vector machine (SVM) was used to complete the defect detection process using faulty cable fixture images obtained from railway tunnels. The experimental results show that the recall and accuracy of the algorithm proposed in this paper are 0.923 and 0.857, respectively, which show that the proposed algorithm has obvious advantages compared with local binary pattern (LBP), CS-LBP, and other variants.
defect detection; leaky cable fixture; scale transformation; continuous gradient; local binary pattern
TP394.1
A
10.37188/OPE.20223003.0331
1004-924X(2022)03-0331-09
2021-07-14;
2021-08-31.
廣東省重點領域研發計劃資助項目(No.2019B010137002);國家自然科學基金資助項目(No.61702347, No.61972267, No.62027801);河北省自然科學基金資助項目(No.F2017210161);河北省教育廳科學研究項目(No.ZD2016052)
張云佐(1984),男,河北石家莊人,博士,副教授,博士生導師,2016年于北京理工大學獲得博士學位,主要從事圖像處理、智能視頻分析、大數據方面的研究。E-mail:zhangyunzuo888@sina.com

宋洲臣(1995),男,湖北襄陽人,碩士研究生,2015年于武漢輕工大學獲學士學位,主要從事圖像處理、模式識別方面的研究。E-mail:627400933@qq.com
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
