雙電機混動車輛串并聯模式切換過程設計與實現
2022-03-07 10:51:44祝浩于釗徐家良
汽車科技 2022年1期
祝浩 于釗 徐家良



摘 ?要:針對雙電機混動車輛在車輛運行過程中串并聯驅動模式的切換需求,通過分析雙電機混聯構型結構特點,提出一種通過發動機、發電機和驅動電機協調控制實現無動力中斷的切換控制方法。將串聯到并聯切換過程分為發動機工作點轉移、離合器結合、動力源切換三個階段,將并聯到串聯切換過程劃分為動力源切換、離合器打開、發動機工作點轉移三個階段,能夠實現串并聯驅動模式的順利切換,同時上述切換階段劃分也能較好的支持串并聯切換過程中的切換意圖改變操作。最后進行了控制策略的實車驗證,切換過程中沖擊度小于8。結果表明,所提出的串并聯切換控制方法能夠完全支持車輛運行過程中的串并聯切換。
關鍵詞:雙電機構型;混合動力;串并聯切換;控制方法
中圖分類號:U464.235 ? ? ?文獻標識碼:A ? ? 文章編號:1005-2550(2022)01-0035-08
Design and Implementation of the Switching Process between Series and Parallel Modes of Dual-motor Hybrid Vehicles
Zhu Hao, Yu Zhao, Xu Jia-liang
( FAW New Energy Development Institute, Changchun 130013, China )
Abstract: Aiming at the switching requirements of the series-parallel driving mode of the dual-motor hybrid vehicle during the operation of the vehicle, by analyzing the structural characteristics of the dual-motor hybrid configuration, a switching control without power interruption is proposed through the coordinated control of the engine, generator and drive motor method. The series-to-parallel switching process is divided into three stages: engine operating point transfer, clutch combination, and power source switching. The parallel to series switching process is divided into three stages: power source switching, clutch opening, and engine operating point transfer, which can realize series-parallel connection The smooth switching of the driving mode, and the above-mentioned switching phase division can also better support the switching intention change operation during the series-parallel switching process. Finally, the actual vehicle verification of the control strategy is carried out. The results show that the proposed series-parallel switching control method can fully support the series-parallel switching during vehicle operation.
Key Words: Dual-Motor Structure; HEV; Series-Parallel Switching
1 ? ?前言
雙電機混聯構型兼具串聯構型和并聯構型的各自優點,在低速和高速工況下都能實現比較好的系統燃油經濟性,其結構也比較簡單。但是目前國內文獻多集中于研究串聯構型下發動機及動力電池能量分配問題,即發動機是工作在“恒溫器”還是“功率跟隨”模式[1-3]。而對雙電機混聯構型的研究都是基于整個系統進行描述,即如何通過各個模式下的能量管理以實現整個系統的燃油經濟性和動力性最優[4-7],而對雙電機混聯構型如何進行串并聯切換控制都未曾提及。
雙電機混聯構型串并聯驅動模式的順利切換是 實現構型優點的基礎,本文在分析雙電機混聯構型結構特點的基礎上,通過對串并聯模式下動力系統輸出方式分析,以保證切換過程中的動力平順性為目標,提出了通過發動機、發電機和驅動電機協調控制以實現串并聯切換控制,并且支持切換過程中的駕駛員切換意圖改變,最后通過試驗對該控制策略進行了驗證。
2 ? ?雙電機混聯構型分析
2.1 ? ?雙電機混聯構型結構特征
圖1為雙電機混聯構型結構圖。當離合器分離時,整個系統為串聯構型,驅動電機負責驅動,發電機和發動機負責發電,發電機兼具起動機作用;當離合器結合后,整個系統為并聯構型,主要由發動機進行驅動,驅動電機進行加速助力和能量回收。
2.2 ? 雙電機混聯構型串并聯驅動模式分析
由于各個部件之間的速比不同,需要將各個部件的轉速扭矩折算至同一個部件,即實現參照系的統一,以下所有扭矩、轉速均指以發動機為參照系轉換后的值
根據雙電機構型的結構特點,整車在串并聯模式下各個部件的控制參數分析如下:
(1)串聯模式
在串聯模式下,離合器打開,車輛由驅動電機驅動。發動機工作在一定的轉速、扭矩點上以滿足整車的驅動及動力電池充放電功率需求,串聯模式下各部件的能量流動如圖2所示:
串聯模式下各部件控制目標為:
(1)
其中TEng_Tgt和ωEng_Tgt分別為發動機目標功率點對應的扭矩和轉速,TTm_Tgt為驅動電機目標扭矩其等于整車驅動扭矩TDrv,串聯模式下發動機發電工作點的選擇已有較多文獻研究[5-7],本文不再贅述;TEng_Act為發動機實際扭矩,TCL為串聯模式下發電機對發動機進行轉速控制時產生的閉環扭矩值。
(2)并聯模式
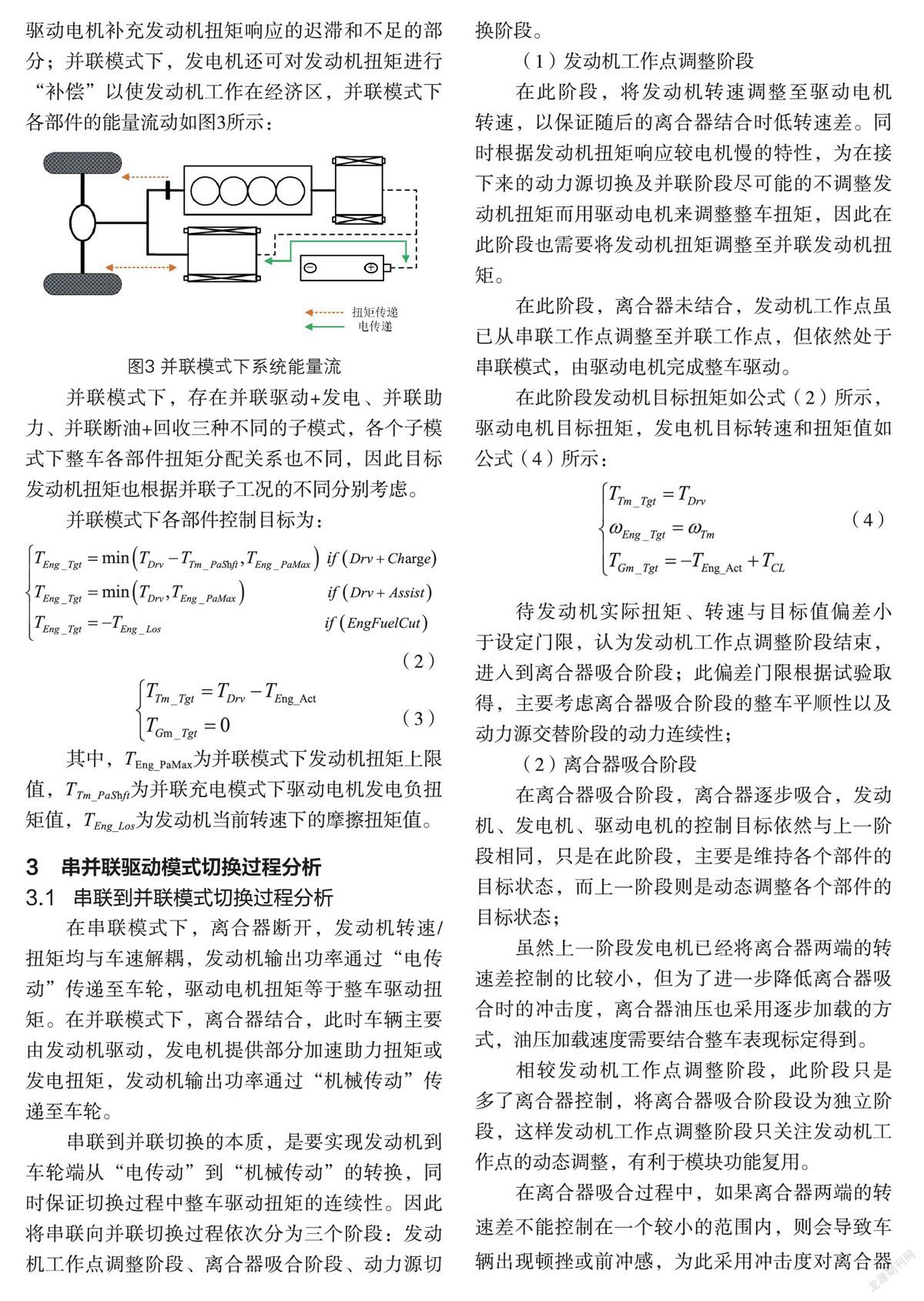
并聯模式下,離合器結合,發電機工作在0扭矩隨轉模式;整車驅動扭矩優先由發動機執行,驅動電機補充發動機扭矩響應的遲滯和不足的部分;并聯模式下,發電機還可對發動機扭矩進行“補償”以使發動機工作在經濟區,并聯模式下各部件的能量流動如圖3所示:
并聯模式下,存在并聯驅動+發電、并聯助力、并聯斷油+回收三種不同的子模式,各個子模式下整車各部件扭矩分配關系也不同,因此目標發動機扭矩也根據并聯子工況的不同分別考慮。
并聯模式下各部件控制目標為:
(2)
(3)
其中,TEng_PaMax為并聯模式下發動機扭矩上限值,TTm_PaShft為并聯充電模式下驅動電機發電負扭矩值,TEng_Los為發動機當前轉速下的摩擦扭矩值。
3 ? ?串并聯驅動模式切換過程分析
3.1 ? 串聯到并聯模式切換過程分析
在串聯模式下,離合器斷開,發動機轉速/扭矩均與車速解耦,發動機輸出功率通過“電傳動”傳遞至車輪,驅動電機扭矩等于整車驅動扭矩。在并聯模式下,離合器結合,此時車輛主要由發動機驅動,發電機提供部分加速助力扭矩或發電扭矩,發動機輸出功率通過“機械傳動”傳遞至車輪。
串聯到并聯切換的本質,是要實現發動機到車輪端從“電傳動”到“機械傳動”的轉換,同時保證切換過程中整車驅動扭矩的連續性。因此將串聯向并聯切換過程依次分為三個階段:發動機工作點調整階段、離合器吸合階段、動力源切換階段。
(1)發動機工作點調整階段
在此階段,將發動機轉速調整至驅動電機轉速,以保證隨后的離合器結合時低轉速差。同時根據發動機扭矩響應較電機慢的特性,為在接下來的動力源切換及并聯階段盡可能的不調整發動機扭矩而用驅動電機來調整整車扭矩,因此在此階段也需要將發動機扭矩調整至并聯發動機扭矩。
在此階段,離合器未結合,發動機工作點雖已從串聯工作點調整至并聯工作點,但依然處于串聯模式,由驅動電機完成整車驅動。
在此階段發動機目標扭矩如公式(2)所示,驅動電機目標扭矩,發電機目標轉速和扭矩值如公式(4)所示:
(4)
待發動機實際扭矩、轉速與目標值偏差小于設定門限,認為發動機工作點調整階段結束,進入到離合器吸合階段;此偏差門限根據試驗取得,主要考慮離合器吸合階段的整車平順性以及動力源交替階段的動力連續性;
(2)離合器吸合階段
在離合器吸合階段,離合器逐步吸合,發動機、發電機、驅動電機的控制目標依然與上一階段相同,只是在此階段,主要是維持各個部件的目標狀態,而上一階段則是動態調整各個部件的目標狀態;
雖然上一階段發電機已經將離合器兩端的轉速差控制的比較小,但為了進一步降低離合器吸合時的沖擊度,離合器油壓也采用逐步加載的方式,油壓加載速度需要結合整車表現標定得到。
相較發動機工作點調整階段,此階段只是多了離合器控制,將離合器吸合階段設為獨立階段,這樣發動機工作點調整階段只關注發動機工作點的動態調整,有利于模塊功能復用。
在離合器吸合過程中,如果離合器兩端的轉速差不能控制在一個較小的范圍內,則會導致車輛出現頓挫或前沖感,為此采用沖擊度對離合器吸合過程控制平順性進行評價,其沖擊度為
其中:ωv為離合器輸出軸角速度,rw為車輪半徑,i0為離合器到主減速器傳動比,ig為主減速器傳動比。
(3)動力源切換階段
在此階段離合器已經吸合,發動機和整車驅動系之間已經建立機械連接,發電機逐步減小發電扭矩,從而將發動機扭矩向驅動系釋放出來,驅動電機同步減少與發電機相同的扭矩,由于發電機扭矩和驅動電機扭矩同步調整量大小相等,因此可以保證發動機、發電機和驅動電機三者對外輸出總扭矩等于駕駛員需求驅動扭矩,以實現驅動力的連續性。此階段發動機目標扭矩如公式(2)所示,發電機和發動機目標扭矩如公式(5)所示:
(5)
其中?TStp為發電機和驅動電機扭矩同步調整步長,此步長值的設定需要考慮電機的扭矩響應速度和精度,以及整車對動力源切換階段的耗時要求,本文設置為50Nm/s;T*Gm_Tgt和T*Tm_Tgt分別為為發電機、驅動電機目標扭矩上一個計算周期的值;
待發電機扭矩已經降低至零,驅動電機扭矩已降低至并聯驅動電機目標扭矩值后,此階段結束,整車進入并聯驅動模式;
3.2 ? 并聯到串聯模式切換過程分析
并聯到串聯切換是串聯到并聯切換的逆過程,要實現發動機到整車驅動系之間從“機械傳動”到“電傳動”的轉換,基于前面的分析,可以將并聯到串聯的切換過程依次分為:動力源切換、離合器分離、發動機工作點調整三個階段。
(1)動力源切換階段
由于在離合器斷開后就為“電傳動”,因此在離合器斷開前,就要實現“機械傳動”向“電傳動”的切換。通過增大發電機發電負扭矩來吸收發動機的扭矩,同時驅動電機以同等的幅度增加發電機吸收的扭矩值,由此在總驅動扭矩等于駕駛員需求扭矩的情況下實現了從發動機驅動到電機驅動的轉換。此后發動機全部功率被發電機吸收,離合器兩端沒有扭矩傳遞。
在此階段發動機扭矩依然如公式(2)所示,驅動電機扭矩、發動機轉速控制目標如公式(6)所示:
(6)
需要注意的是,此階段驅動電機扭矩由兩部分組成,一部分來自發動機轉移過來的扭矩,另一部分來自自身并聯助力的部分,其中并聯助力部分也可以用來響應外部扭矩請求,比如ESP扭矩。
待發動機扭矩完全被發電機吸收后,動力源切換階段結束。
(2)離合器分離階段
在離合器分離過程中,由于分離過程需要一定的時間,在此期間為了避免因為離合器兩端因為轉速差過大導致滑磨功過大,此時發電機通過轉速控制使發動機轉速與驅動電機相同。在這個過程中,整車驅動依然由驅動電機執行。
此階段發動機扭矩依然如公式(2)所示,驅動電機扭矩、發動機轉速控制目標如公式(4)所示:
(3)發動機工作點調整階段
離合器分離后,發動機已經與傳動系斷開,此時已經處于“電傳動”狀態,發動機目標工作點為串聯目標工作點;驅動電機獨立完成整車的驅動,此階段發動機扭矩、驅動電機扭矩、發動機轉速控制目標與串聯工況一致;
待發動機工作點調整至串聯目標工作點附近后,發動機工作點調整階段結束,整車進入串聯驅動模式;
3.3 ? 串聯到并聯切換中切換意圖改變分析
車輛運行過程中工況多變,因此存在串并聯切換過程中切換意圖發生改變的情況,串并聯切換控制應該能覆蓋此種工況,保證串并聯切換在任何情況下都能順利進行,最終實現目標驅動模式。
(1)發動機工作點調整階段切換意圖改變
在發動機工作點調整階段,如果發生再次返回串聯的切換請求,則只需將發動機的目標工作點從并聯工作點重新調整至串聯工作點即可,當發動機工作點到達串聯工作點附近后,則重新進入串聯驅動模式。
(2)離合器吸合階段切換意圖改變
在離合器吸合階段,如果發生再次返回串聯的切換請求,則應切換至離合器分離階段執行離合器分離操作,待離合器分離完成,則進入到發動機工作點調整階段,目標發動機工作點為串聯工作點,當發動機工作點到達串聯工作點附近后,則重新進入串聯驅動模式。
(3)動力源切換階段切換意圖改變
在動力源切換階段,實現發動機動力到傳動系由“電傳動”到“機械傳動”的轉換,如果發生再次返回串聯的切換請求,則應該從“機械傳動”再次轉換到“電傳動”,發電機增大發電負扭矩吸收發動機扭矩,驅動電機同步增加驅動扭矩,即執行公式(6),然后待動力源切換完成后,依次執行離合器分離階段和發動機工作點調整階段,待這兩個階段執行完畢后,再次進入串聯驅動模式。
3.4 ? 并聯到串聯切換中切換意圖改變分析
(1)動力源切換階段切換意圖改變
在并聯到串聯切換第一階段,要實現整車由發動機驅動到電機驅動的轉換,如果在此時需要重新切換回并聯,則需要再次轉換回發動機驅動,即驅動電機由當前扭矩逐步降低扭矩至并聯扭矩,發電機扭矩由當前扭矩逐步降低至零。待發動機扭矩和驅動電機扭矩再次等于并聯扭矩時,此階段結束,再次回到并聯驅動模式。
(2)離合器分離階段切換意圖改變
當并聯到串聯切換進入到第二階段即離合器分離階段時,如果需要再次轉換為并聯驅動,則需要從離合器分離操作轉為離合器結合操作,此過程發動機扭矩依然等于并聯發動機扭矩,發電機基于轉速控模式將發動機轉速維持與驅動電機相同的轉速;待離合器再次結合后,則轉入動力源切換階段,待動力源切換階段結束,整車重新進入并聯驅動模式。
(3)發動機工作點調整階段切換意圖改變
在發動機工作點調整階段,此時離合器已經脫開,整車已經進入串聯驅動模式,僅僅是發動機工作點還未到達目標串聯工作點,此時如果需要再次進入并聯驅動模式,則會依次執行串聯到并聯模式切換的發動機工作點調整階段、離合器吸合階段和動力源切換階段,直至重新進入并聯模式。
4 ? ?軟件建模與實車驗證
4.1 ? 控制策略建模
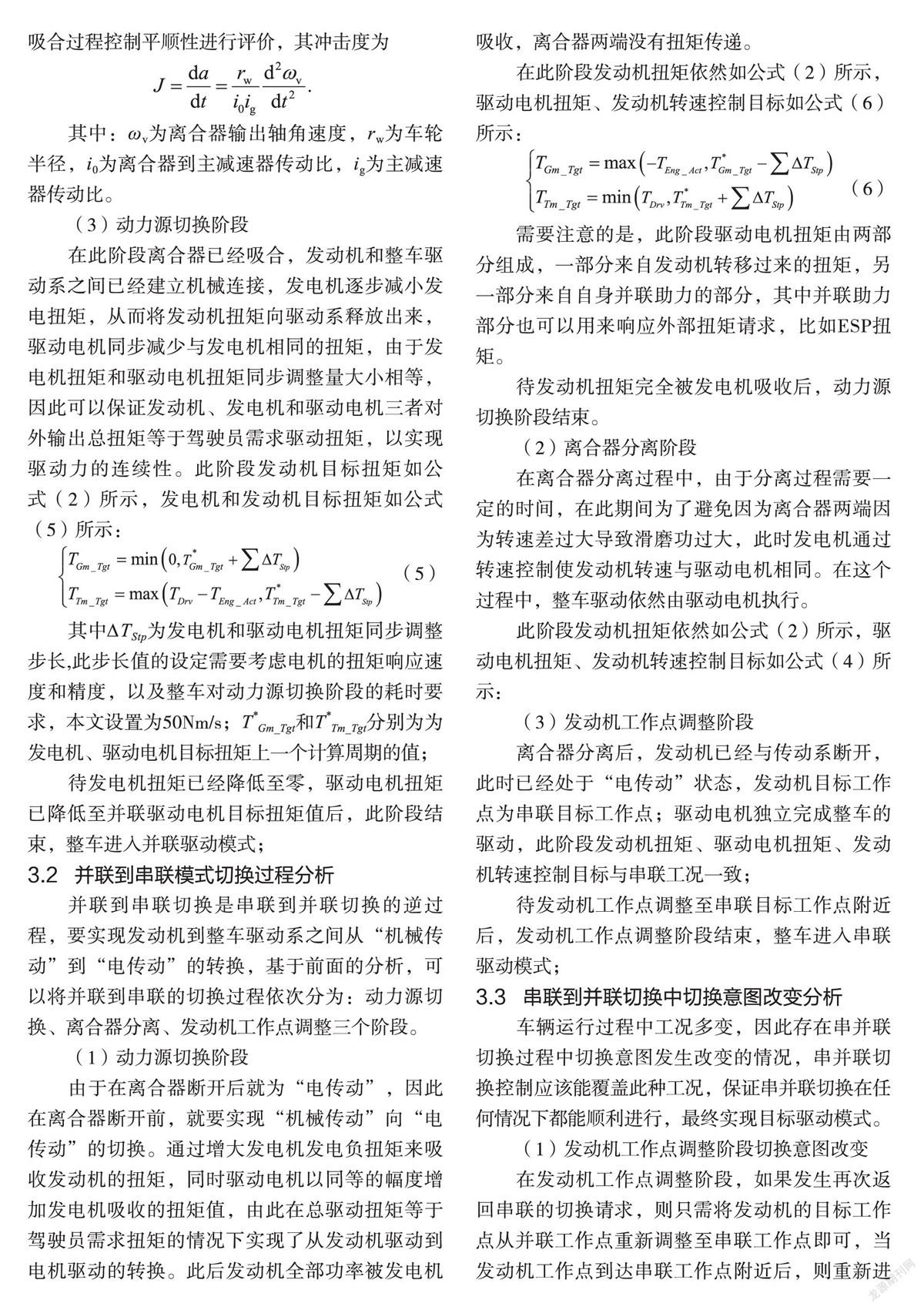
根據上述分析,串并聯切換控制的基本控制邏輯跳轉如圖4所示:
4.2 ? 實車驗證
在動力總成臺架和一汽農安試驗場分別對本文提出的串并聯切換算法進行了實車驗證。在實車道路試驗中,發動機熱機。試驗中車輛先在串聯模式下以恒定油門在保持80km/h勻速行駛,隨后手動設定串并聯模式切換請求,觀察并記錄切換過程。
因為切換過程中車速基本恒定,而電機通過旋變測量轉速,其轉速測量精度和響應速度皆較高,因此可通過切換過程驅動電機轉速是否變化來評價切換過程中的整車扭矩平順程度。
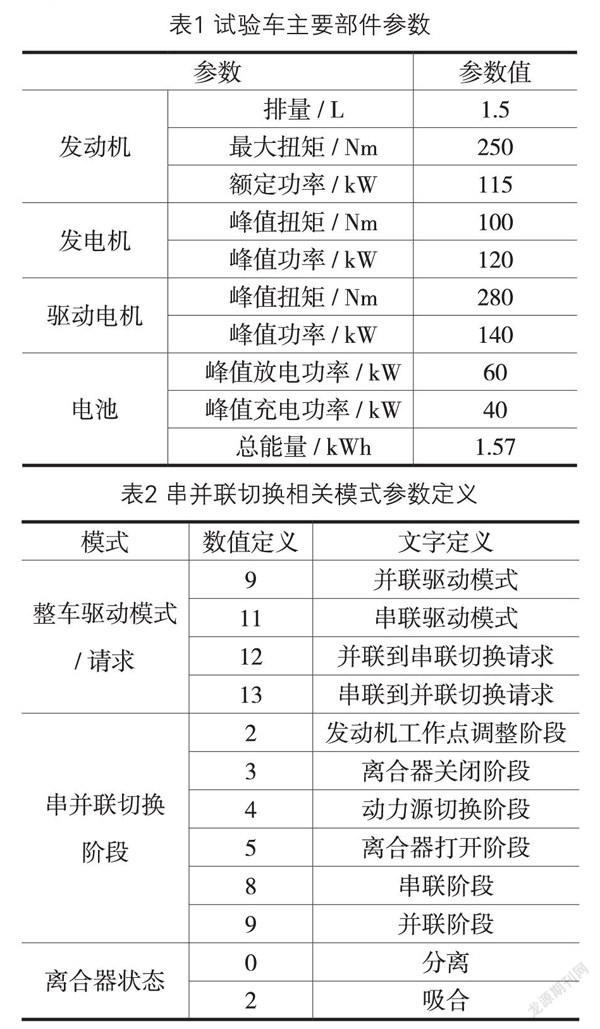
試驗車整車及關鍵零部件參數如表1所示,串并聯切換過程中所用到的整車驅動模式和串并聯切換控制階段定義如表2所示。
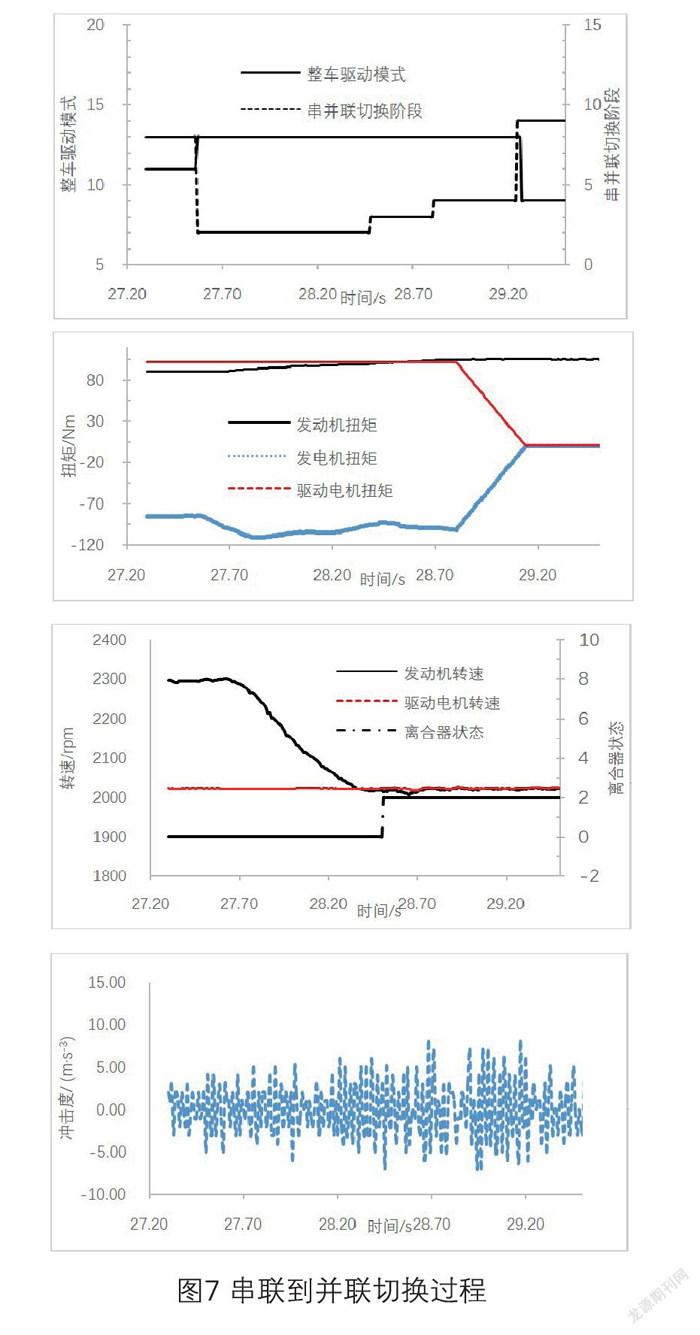
圖7是完整的串聯到并聯切換過程。由圖中數據,從發出并聯切換請求到最后完成并聯切換,耗時1.7秒,其中發動機工作點調整階段耗時0.91秒,離合器結合階段耗時0.33秒,動力源切換階段耗時0.44秒。在切換第一階段,發電機調整其輸出扭矩以使發動機轉速快速變化至驅動電機轉速,而發動機扭矩從當前扭矩變化至并聯發動機扭矩;由于在第一階段發動機扭矩已調整完畢,所以在第三階段發動機扭矩沒有變化;在第三階段,驅動電機和發電機扭矩快速交替變化以完成從電機驅動到發動機驅動的轉換。切換過程中,驅動電機轉速基本沒發生改變,整個切換過程中沖擊度小于8,說明切換過程中總驅動扭矩平穩連續且無中斷,與實車主觀感受一致。其中發動機工作點調整階段最為耗時,這個主要與發動機/發電機組合的轉速響應特性以及發電機的扭矩設定方式有關,后續可通過調整離合器建壓方式以適當提高離合器結合前的轉速差,縮短發動機轉速調整時間。
圖8是完整的并聯到串聯切換過程。由圖中數據,整個切換過程耗時0.76秒,其中動力源切換耗時0.5秒,離合器分離耗時0.2秒,發動機工作點轉移耗時0.02秒,切換過程中驅動電機轉速基本不變且保持平順,整個切換過程中沖擊度小于7,整車主觀感受較好。在離合器打開前,發電機發電扭矩和驅動電機扭矩分別等速率增加,以實現整車由發動機驅動轉換到驅動電機驅動。在離合器分離后,整車即已實現串聯驅動,發動機工作點逐步爬升至串聯目標工作點。
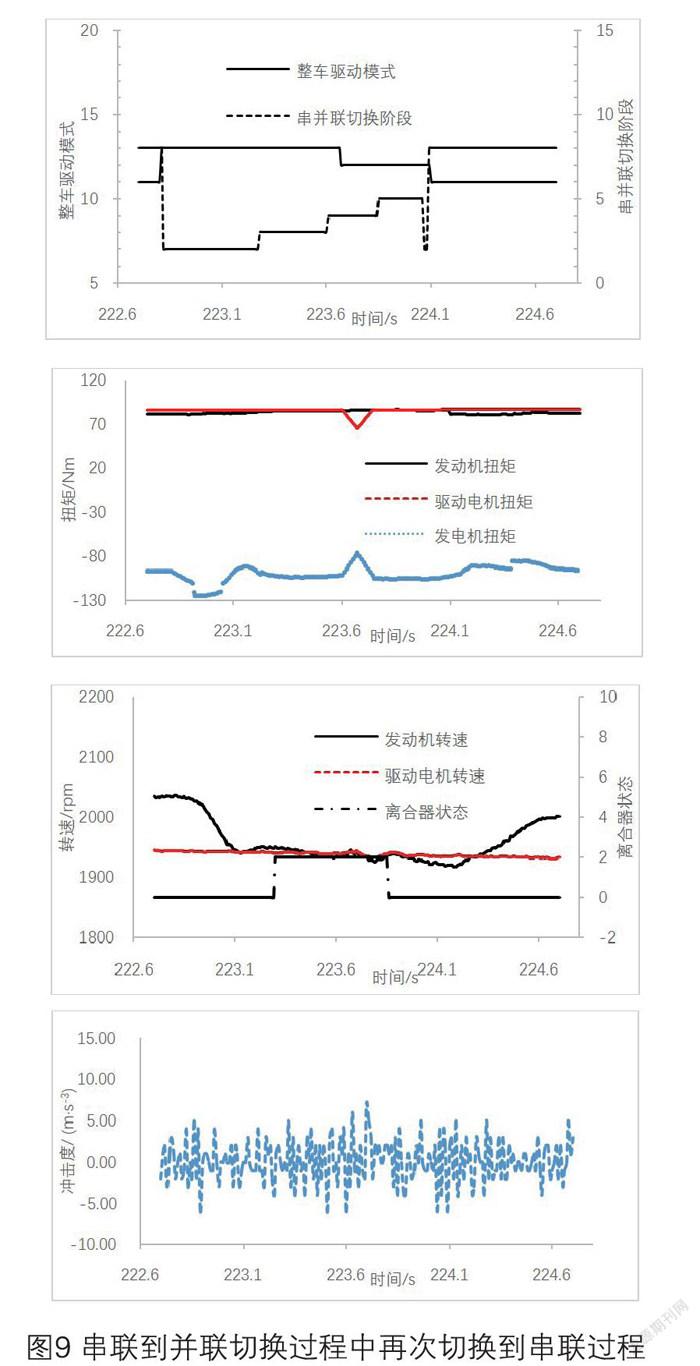
圖9是串聯到并聯切換時,在進行到動力源切換階段時,又切換回串聯驅動模式的切換過程。在切換過程中,當有重新切換回串聯請求后,動力源切換階段將轉移到發動機端的扭矩重新轉移回驅動電機,隨后執行離合器分離和發動機工作點轉移階段,最后切換回串聯驅動模式。從圖中數據可以看出,切換過程驅動電機轉速依然保持平穩,整個切換過程中沖擊度小于7,說明整個過程驅動扭矩平穩連續。
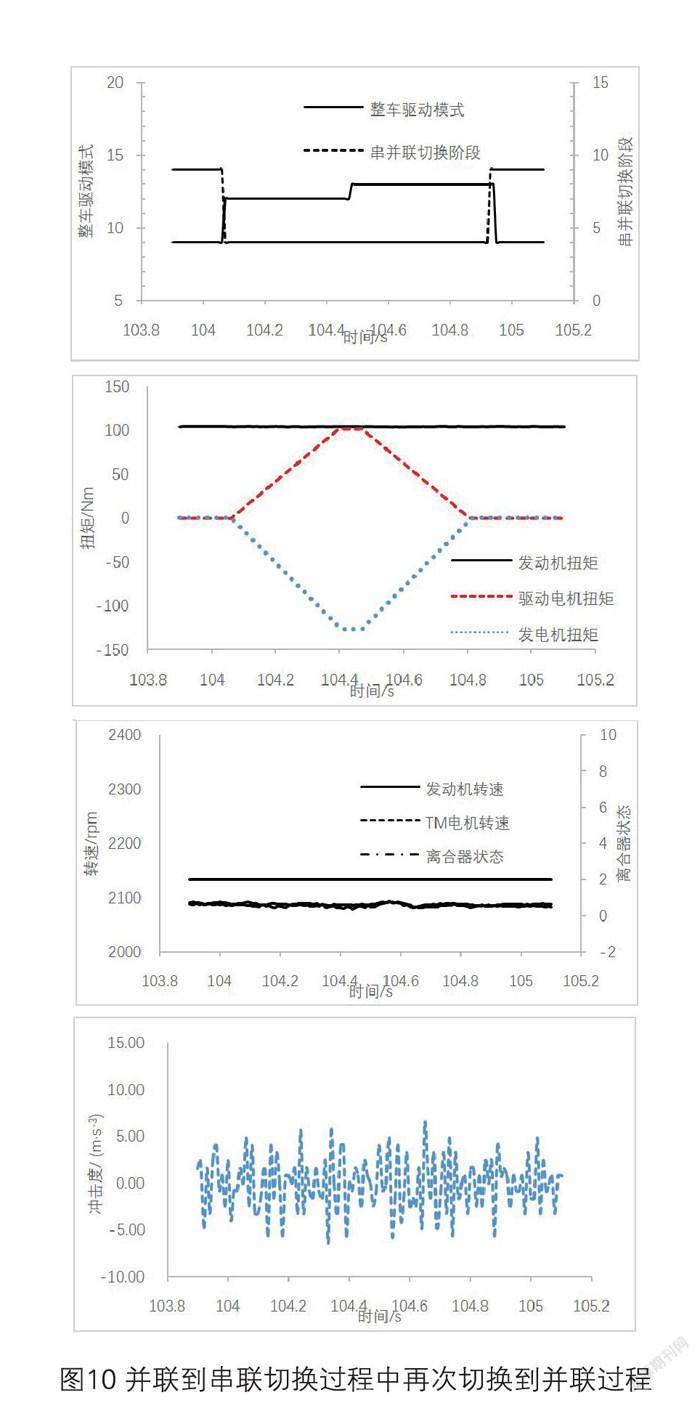
圖10是并聯到串聯切換時,在進行到第一階段動力源切換階段時,又切換回并聯驅動模式的切換過程。在切換過程中,當有重新切換回串聯請求后,動力源切換階段將轉移到發動機端的扭矩重新轉移回驅動電機,在此過程中,離合器一直保持結合狀態,待動力源切換過程結束中,切換回串聯驅動模式。從圖中數據可以看出,切換過程驅動電機轉速基本沒有變化,整個切換過程中沖擊度小于6.5,說明整個過程驅動扭矩平穩連續。
5 ? ? 結束語
建立了雙電機混聯構型混合動力的動力學模型,并在此基礎上對串并聯切換過程進行了分析,將串聯到并聯行駛切換過程劃分為發動機工作點轉移、離合器結合、動力源切換三個階段,將并聯到串聯行駛切換過程劃分為動力源切換、離合器打開、發動機工作點轉移三個階段,通過以上切換步驟劃分,保證了切換過程的順利進行。同時,以上切換階段劃分方法也支持串并聯切換過程中切換意圖改變。最后進行了實車驗證,證明了所提出的串并聯切換方法能夠保證串并聯切換順利進行,切換過程扭矩連續平順。
參考文獻:
[1]馮代偉. 串聯型液壓混合動力汽車的能量管理策略研究[D].成都:電子科技大學,2012.
[2]王成,郭淑英,劉凌. 串聯式混合動力系統在公交客車中的開發與應用[J].機械工程學報,2009(2):18-24.
[3]劉樂. 串聯混合動力汽車建模與能源管理系統控制策略研究[D].長春:吉林大學,2011.
[4]冷宏祥,葛海龍,孫俊,等. 上汽榮威550插電式混合動力系統的特點[J].科技導報,2016(6):90-97.
[5]張雄,張安偉,段心林. 廣汽機電耦合系統G_MC的開發和應用[J].重慶理工大學學報,2019(2):50-55.
[6]Naritomo Higuchi,Yoshihiro Sunaga,Masashi Tanaka,Hiroo Shimada. Development of a New Two-Motor Plug-In Hybrid System [J]. SAE 2013-01-1476(2013).
[7]Hirihito IDE,Yoshihiro SUNAGA,Naritomo HIGUCHI. Development of SPORT HYBRID i-MMD Control System for 2014 Model Year Accord[J]. Honda R&D Technical Review,Vol.25,No.2,p.33-41.
專家推薦語
任衛群
東風商用車技術中心
先行技術開發部總工程師 ?副教授
論文對于混聯混動車輛的模式切換控制進行了分析和測試,研發工作比較系統完整。